Procedia Engineering 15 (2011) 2398 – 2402 1877-7058 © 2011 Published by Elsevier Ltd. doi:10.1016/j.proeng.2011.08.450
Procedia
Engineering
Procedia Engineering 00 (2011) 000–000 www.elsevier.com/locate/procediaAdvanced in Control Engineering and Information Science
Particle swarm optimization algorithm for passive multi-target
tracking
Jinlong Yang
a*, Hongbing Ji
a, Jinmang Liu
a,b aSchool of Electronic Engineering, Xidian University, Xi’an 710071, China b The Missile Institute of Air Force Engineering University, Sanyuan, Shaanxi, 713800, ChinaAbstract
In order to improve the performance of particle data association filter algorithm for multi-target tracking, an improved multi-target tracking algorithm is proposed in this paper. Particle swarm optimization (PSO) technology is introduced in the particle filter (PF) algorithm and a new best fitness function of particles is defined to better approximate the true posterior distribution, fuzzy clustering technique is combined for data association in the proposed algorithm. Simulation results show that the proposed algorithm has better performance than the conventional particle data association filter algorithm for passive multi-target tracking.
© 2011 Published by Elsevier Ltd.
Selection and/or peer-review under responsibility of [CEIS 2011]
Keywords: Target tracking; Joint probabilistic data association; Particle swarm optimization; Fuzzy clustering
1. Introduction
With increasing complexity of war environments, multi-target tracking for passive multi-sensor has become a difficult problem and a hot issue in the tracking field. However, two problems need to be solved for the passive multi-target tracking, one is data association and the other is nonlinear filtering. Usually, the effective data association methods are Joint Probabilistic Data Association (JPDA)[1], Multiple Hypothesis Tracking (MHT)[2] and so on. However, these algorithms are quite complex in computation. Some improved algorithms were proposed in [3,4], but most of them decreased the computational burden
* Corresponding author. E-mail address: [email protected].
Open access under CC BY-NC-ND license.
at the cost of tracking accuracy. Recently, the fuzzy clustering technique has been applied to multi-target tracking [5] by minimizing the objective function to partition measurement data. Unlike the traditional JPDA algorithm, it is unnecessary to calculate association probabilities of all feasible events. For the nonlinear problem of passive tracking system, particle filter (PF) [6,7] is considered as an effective method for nonlinear non-Gaussian target tracking system, which uses a set of weighted random sampled particles to approximate the posterior probability distribution of targets. In theory, PF can approximate any probability distributions when the number of particles tends to infinity. However, in practice, the number of particles is usually limited, which leads to particle degeneration in the process of resampling, making the estimated target state inaccurate, and even causing the filter divergence.
Particle swarm optimization (PSO) algorithm [8,9] is an optimization algorithm by simulating the social behavior. In this paper, to remedy the shortcomings of the particle filter algorithms, a new passive multi-target tracking algorithm is proposed. The maximum entropy fuzzy clustering method is used for data association, and the idea of PSO is introduced in particle filter algorithm so that a small number of particles can approximate the real target posterior probability distribution very well. Simulations show that the proposed method has better tracking performance than the traditional particle filter algorithm.
2. Principle of Particle Swarm Optimization
Assume there is a particle swarm 1 2 formed by particles in a D-dimensional search
space, the position and the speed of the
i
th particle at time k are represented as 1 2{ , , N} X = x x Lx N ( , , ) k k k k i i i iD x = x x Lx and
1 2 , respectively. p p denotes the best position which the i th particle has
achieved so far, and g g1 g2 gD is the best of for any . Each iteration process of
the particle velocity and position are given as follows,
( , , ) k k k k i i i iD v = v v Lv k ( ,k1 k2, k) i i pi LpiD ) k p = , k p L ( , k k p = p k i p i=1, ,L N
)
i(
)
(
1 1 1 2 2 k k k k k k i i i i g v + =λv +c u p −x +c u p −x 1 1 k k k (1) i i i x + =x +v+ (2) where 1 and 2 are the learning factors, usually they are the constants in the interval (0,2). u1 and 2 are the random numbers in the interval (0,1). denotes the velocity of the ith particle at time k, the updated value of which needs to be determined by the value of previous time, i.e., the particles maintain a velocity inertia. denotes the inertia weight, which controls the search space capabilities of particles, the greater the value, the greater the search space scope of particles. Usually, is set to decrease linearly with the number of iterations to adjust the PSO algorithm for global and local search ability [10]. c c λ∈ u k i v (0,1) λ3. Particle Swarm Optimization Algorithm for Multi-target Tracking
The state equation and measurement equation in two-dimensional case are expressed as follows
1 ( ) i i k+ = f k + x x i i i k w i k v (3) ( ) k =h k + z x (4)
where and are the state vector and the observation vector of the target at time k. and denote the state noise and the observation noise with covariance and , respectively.
i k x i k z ith i k R i k w i k v i k Q 3.1 Maximum Entropy Fuzzy Joint Probabilistic Data Association
Suppose that a measure set{ ,z jj =1,2,LMk}is related to the target set { , 1,2,x ii = Lc}. Then the
association probability βji between the measurement zj and the target xi can be calculated by the Fuzzy clustering technology. The calculation of βji can refer to [5].
3.2 Optimization fitness function
To avoid particle degeneracy, we move these samples toward the region of the state space where the likelihood is significant, without allowing them to go far away from the region of significant prior, so that the optimized particles can approximate the real posterior distribution well. Then the optimization fitness function is defined as follows:
, , | 1 1 | 1 2 | 1 1 1 ˆ F( i n ) Mk[ ( ( ) | i n )] ( |i i n ) k k ji j k k k k k j n x k p z k x k p x C β − − = ⎡ = ⎢ + ⎣
∑
x ⎦ , − ⎤ ⎥ 1] (5)where is a normalization constant, Cn k k1, 2∈[0, denote proportional coefficient and k k1+ 2 =1. βjiis the associated probability. denotes a weighted observation likelihood.
denotes the prior distribution, i.e., the transition probability distribution.
, | 1 ( ) | i n )] k k k x − 1 [ ( k M ji j j p z β =
∑
, | 1 i i n k k k p( |xˆ x −)As can be seen from Eq. (5), the fitness function of particles contains both the likelihood distribution and the prior distribution of the state space. k1 indicates the move level of particle to the maximum likelihood region in the state space. When the value of 1 is greater than 0.5, it indicates that the particles are closer to the high likelihood region. is used to adjust the particles so that they cannot deviate from the prior distribution of the state space.
k
2
k 3.3 Steps of the proposed algorithm
Suppose is the optimal estimation for m targets at time in the fusion center. 1 is the corresponding state covariance matrix. ˆ ( 1)
i k− x k−1 i k− p , 1 i n k
x− is the particle with weight after resampling, denote the number of particles. Then, the recursive steps of the proposed algorithm (PSO-MEF) for the optimal multiple targets estimation at time k are as follows,
, 1 1/ i n k N ω − = 1, , n= L N
Step 1: One step prediction of state vectors and observation vectors by equation and
, respectively. xˆk k| 1− = f(xˆk−1)
)
i i
| 1
Step 2: Confirmation of effective measurements according to the following equation, (ˆ
i i
k=h k k−
z x
2
{ ( ) :z k gj ≤γ,j=1,2, ,LMk} , where γ is a threshold, , and
. 2 T 1 | 1 | 1 ˆ ˆ [ ( ) i ] ( )[ ( ) i ] j k k j k k g z k z S k z k− z − − = − − { } T ) ] i zi − − − | 1 ˆ ˆ ( ) [( ( )j k k )( ( )j S k =E z k −z z k k k| 1
Step 3: Calculation of the association probability matrix β= βji by the maximum entropy fuzzy joint probabilistic data association technique [5].
Step 4: Initialization of the particles at time by k , ,
| 1 ( 1) 1
i n i n i n
k k k k,
x − = f x − +w−. Step 5: Particle Swarm Optimization
(1) Set parameters. l∈[1,Lmax] denotes the number of iterations, Lmax is the maximum number of
iterations. , ,
| 1,0 | 1
i n i n k k k k x − =x −
(2) The iterative process of particle swarm optimization are given below, is the initial particles swarm with initial particle velocity .
, ,0 0 i n k v = , , , , , , 1 , 1 1( , | 1,) 2 2( , | 1, i n i n i n i n i i n k l k l k l k k l k l k k l v + =λv +c u p −x − +c u g −x , , , i n i n i n ) − | 1, 1 | 1, , 1 k k l k k l k l (6) x v − + = − + + (7) x
, p − n where, , ,| 1, ,| 1, , 1 , , , , 1 , F( ) F( ) , i n i n i n k k l k k l k l i n k l i n k l x x p p − − − ⎧ > ⎪ =⎨ ⎪⎩ i f ot her wi se ,, , , , arg max F(i n, 1: , ) k l i i n i k l k l p n N k l, g p = = = , , 1 i n k l p − p , | 1, F( i n ) k k l x − . and
indicate the fittest values of the particle and , respectively.
, , 1 F( i n ) k l p − , | i n k k
x −1,l L∈
[
1,Lmax]
is the total number of iteration when the iteration process meets the iteration conditions, and the optimized particlesare obtained with weight
, , | 1, 1 ( i n )}N k k L n x| 1,− ω x − = { i n , k k L ,| 1,− ( ( ) |zj k xk ki n,|−1,L)] 1 1 Mk[ ji j n x p C ω β = =
∑
( i n ) k k L .Step 6: Resampling. A new particle set , , is obtained with weight
| 1 1
{ i n , i n N} k k k n
x − ω = ωki n, = N1 after the
importance resampling.
Step 7: Output state and covariance by
, , | 1 1 ˆi N i n i k k k n x ω − = =
∑
x n k ] x k (8) , , , T | 1 | 1 | 1 | 1 1 ˆ ˆ [ ( )( ) N i i n i n i i n i k k k k k k k k k k n x x ω − − − − = =∑
− − p x (9) 4. SimulationsThe effectiveness of the proposed algorithm will be illustrated through an example of multi-target tracking by passive multi-sensor in a two-dimensional plane. The state equation and measurement equation under passive multi-sensor tracking system are described as:
1 k =F k− +G x x w (10) arctan( k y) k x y s− k = x s− + k z v (11) where, [ , , , ]T k= x v y vk x k y x
) denotes the target state at time k including position and velocity information. ( ,x y
Assuming there are three targets with uniform motion. The initial states are
, , ,
respectively. There are three passive sensors with the same detection probability . The location
of sensors are , 2 , and 3 . In this simulation, the sampling
time is , sampling 40 times in all. System noise and measurement noise are selected as 10 and , respectively. The clutter density is
S= s s indicates the location of a passive sensor.
(
)
1= 15km -0.35km/s 4.9km,0.1km/s x , , ( ) 1 2km, 2km S = − − S 1 T = s 5mrad ( ) 2= 15km -0.35km/s 9.1km,-0.1km/s x , , (18km,-2km) = S =(-2km,17km 6 2 10 / f(
)
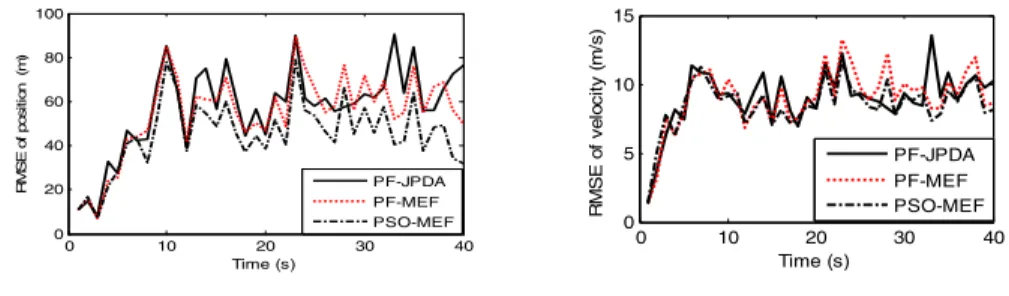
3= 9.1km 0km/s13km,0.3km/s x , , 0.98 d P = ) m P = − m , and the number of particles is 100.0 10 20 30 40 0 20 40 60 80 100 Time (s) R M S E o f po si tion ( m ) PF-JPDA PF-MEF PSO-MEF 0 10 20 30 40 0 5 10 15 Time (s) R M S E o f ve lo ci ty ( m /s ) PF-JPDA PF-MEF PSO-MEF
Fig. 1. RMSE of the estimated position Fig. 2. RMSE of the estimated velocity
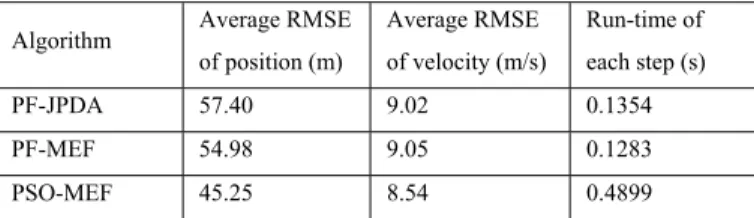
three algorithms in terms of the position and velocity, respectively. It is clear that the proposed method (PSO-MEF) has higher tracking accuracy than the standard PF-JPDA method and PF-MEF method, and has a better stability. As can be seen from Table 1, the average position RMSE of the PSO-MEF method decrease by 21% compared to the PF-JPDA method. Moreover, the maximum entropy fuzzy joint probabilistic data association avoids calculating the association probabilities of all observation feasible events, which can improve the operational efficiency of PF-MEF and PSO-MEF method without decreasing the tracking accuracy.
Table 1. Comparison of the algorithm performance
Algorithm Average RMSE of position (m) Average RMSE of velocity (m/s) Run-time of each step (s) PF-JPDA 57.40 9.02 0.1354 PF-MEF 54.98 9.05 0.1283 PSO-MEF 45.25 8.54 0.4899 5. Conclusions
A novel optimized algorithm is proposed, which can improve the performance by introducing the idea of PSO. It requires only a small number of particles to approximate the state posterior distribution well, avoiding particle degeneracy which leads to inaccuracy of the estimated states. In addition, MEF-JPDA method introduced in the proposed method can reduce the association time between measurements and targets, further improving the operational efficiency of the novel algorithm.
Acknowledgements
This work was supported by the National Natural Science Foundation of China (No. 60871074).
References
[1] Fortmann T, Bar-Shalom Y, Scheffe M. Sonar tracking of multiple targets using joint probabilistic data association, IEEE Journal of Oceanic Engineering, 1983, OE-8:173-183.
[2] Blackman S. Multiple hypothesis tracking for multiple target tracking, IEEE A&E Systems Magazine, 2004, 19 (1):5-18. [3] Roecker J, Pillis G. Suboptimal joint probabilistic data association, IEEE Trans. on AES, 29(2), 1993, 504-510. [4] Roecker J. A class of near optimal JPDA algorithms, IEEE Trans. on AES, 1994, 30(2):504-510.
[5] Li LQ, Ji HB, Gao XB. Maximum Entropy Fuzzy Clustering With Application to Real-Time Target Tracking, Signal Processing, 2006, 86(11): 3432-3447.
[6] Ekman M. Partilce filters and data association for multi-target tracking, Intl Conf on Information Fusion, Cologne, 2008, 1-8. [7] Vermaak J, Godsill SJ, Perez P. Monte Carlo Filtering for Multi-target Tracking and Data Association, IEEE Trans. on AES, 2005,41(1):309-332.
[8] Jatoth RK, Kishore Kumar DT. Particle Swarm Optimization Based Tuning of Unscented Kalman Filter for Bearings Only Tracking,Int Conf on Advances in Recent Technologies in Communication and Computing, 2009, 444-448.
[9] Yang SY, Ma Q, Huang WJ. Particle Swarm Optimized Unscented Particle Filter for Target Tracking, International Congress on Image and Signal Processing, Tianjin, China, 2009, 1-5.