A
A
N
N
E
E
F
F
F
F
I
I
C
C
I
I
E
E
N
N
T
T
M
M
E
E
T
T
H
H
O
O
D
D
O
O
F
F
B
B
I
I
T
T
P
P
L
L
A
A
N
N
E
E
F
F
I
I
L
L
T
T
E
E
R
R
I
I
N
N
G
G
A
A
L
L
G
G
O
O
R
R
I
I
T
T
H
H
M
M
U
U
S
S
I
I
N
N
G
G
C
C
O
O
N
N
V
V
E
E
X
X
H
H
U
U
L
L
L
L
O
O
F
F
M
M
E
E
D
D
I
I
C
C
A
A
L
L
I
I
M
M
A
A
G
G
E
E
S
S
S
Sw
wa
ar
rn
na
al
la
at
th
ha
a
P
P.
.,
,
D
Dr
r.
.
P
P.
.
V
Ve
en
nk
ka
at
ta
a
K
Kr
ri
is
sh
hn
na
a
School of Computing Science and Engineering, VIT University, Vellore -632014, TN, India
ABSTRACT: The importance of the image analysis with
respect to industrial, medical, satellite image processing applications is gaining attention of many researchers in recent times. The recognition of faults present in the damaged images is vital for based applications. In this paper, we aim at developing a method for identifying faults that present in images. Our approach is based on the concept of Bit Plane Filter using convex hull methods. The bit plane filtering methods used to slice the given images to fix on the affected portion of the given images. The convex hull method is used to identify the control points that are needed for reconstruction of images. The performance of bit plane method is evaluated using simulation and it is proved that our approach produces better results when compared to current methods.
KEYWORDS: Bit Plane Filter, Convex Hull, 3D Images,
Medical Images.
1. INTRODUCTION
The damaged portions of images has been a challenging job in making decision in finding the third dimension of the affected portion in many fields like industrial applications, medical applications and satellite image processing applications. And the damaged region of the different application images may lead to so many natural disasters of rocket launching, wrong analysis of diseases of medical images, inaccurate preprocessing of satellite images, etc.,. If the damaged portion is major, that portion to be replaced and in case of minor, that region have to be repaired based on the application domains. To have proper analysis of the above applications, using mathematical statistical methods, the third dimension reconstruction which was implemented using centroid model gives less precise results as per P.Swarnalatha et al. [ST12]. It is not apt to access the affected portions in images even by an effective superior human organ and the key phases of processing an image which may not be appropriate for examining affected portions in images that could enhance over thousands of miles of image lines And the reasons are mainly fatigue, subjectivity and rate. Hence in this paper, we aimed at developing an approach for reconstruction of images that helps in finding of faults at different regions of images. Our approach is based on bit plane slicing and convex hull property.
In the paper centroid model of measurement of height images, the data /input image has been considered for reconstruction used with statistical moment calculations yielding not giving the accurate results. Thereby, the proposed methodology (Efficient Bit Plane Filtering Algorithm-EBPFA) has been used for reconstruction of images by applying two methods as 1. Bit Plane Algorithm to slice an image.
2. Convex Hull Method to draw planes based on nearest points which can be used for further process of images.
As the first step, the bit plane filter algorithm is used for dividing the images into slices to have better visuality and methodology which can be given as follows: an image is divided into a set of bits matching to a given bit position in each of the 0‟s and 1‟s which signifies an image. That image can be used to divide them into slices to establish the trivial information of the image.
And as the second step, the convex hull can be defined as the Euclidean plane which consists of X points in a set, gives the nominal set of convex with X elements. The „X‟ elements may provide the negligible values which can be called as convex sets. As a result, every convex set should contain „X‟ having all convex combinations of points in „X‟. Hence obviously in the of each and every set of convex , each and every combinations of convex set can be possible with points for sliced images from the bit plane filter algorithm that possess the noteworthy information.
Finally, the worth mentioning information from the convex hull will have points that used for further process of images.
2. BACKGROUND
In the survey, different image enhancement techniques have been implemented that successfully extracted the features of the affected areas as per table no.1 which is not accurate.
2.1 Third Dimension of the Damaged Region
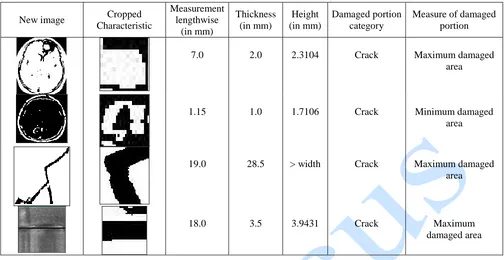
The third dimension calculation is vital as the angle of incidence of damaged image can be analyzed based on the above computation. The degree of X-rays and the image dimensions of width, height and length have been considered as an intake from the end user. The damaged portion of an image is shown below with the formula for finding the affected region.
Fig. 1: Component with damaged region
Fig. 2: Height of the damaged portion
The solution for computing height is:
Sin
W
Tan x l
Height
/2
l = Measurement lengthwise of the damaged portion x = 0; Assuming that affected portion is accurately in the midpoint
α = Scale of the X-rays
W = Distance across the affected region δ = Width of an image
We have to replace the damaged image with a new image if the third dimension of the damaged portion is more than the width of the damaged picture Swarnalatha P et al.[S+09].
In Joydeep Biswas et al. [BV06], the quantity of the third dimension point shade is reduced by generating a smaller set of “plane filtered” third dimension points, which computes convex polygons to fit the plane filtered points. And the points are iteratively merge convex plane polygons without maintaining a history of
all observed plane filtered points and perform all of the above in real time and at full frame rates.
As per Chuan-Yu Cho et al. [C+05], a scaleable bitstream has been derived from different slices by using the bitplane coding methods. An inefficiency of straightforward combining method has become a restricted access at the time of decoding a eminence improvement bitstream with many bit slices, they have projected a traditional bitslice coding/decoding method of non-optimised FGS codec which takes care by not only making the decoding time independent of the bitplane numbers which has been joined as the bitslice decoding that require lots of bitwise procedures at the time of joining bitslices into their coefficients in the decoder but also by joining time by > 8 factor. Andthereby solved the problem by enabling the bitslices which have to be decoded in terms of time without any other extra calculations of bitslice combination time received from the layer of enhancement decoder.
Andr´es Fr´ıas-Vel´azquez et al. [FP10] deals with a new parallel method which will do stack morphological filters, compared to logical methods and positive boolean procedures that can be done in an equivalent way to get the changed bit-slices of the application of image bitwise decomposition to stage-manage the image with grayscale at a bit-slice level. The derivation of the mixture of bitwise and threshold disintegration which has been supervised and studied has lead to a binary encoded algorithm whose control flow is full. And the algorithm gives an attractive presentation depending on the histogram of an image by way of survey of their hierarchical processing and connection among 0‟s and 1‟s decompositions.
Christian Böhm et al. [BK01] discuss about the usage of multidimensional index templates for the purpose of the convex hull of a point database such as R-trees with an algorithm of two convex hull methods. First method pass over the depth-first index and second one provides an importance to every live node by corresponding to the highest distance of object portion to the approximate convex hull. This has resulted in the prominence over processes which store in flat files with the point set.
Xianquan Zhang and Zhenjun Tang et al. [Z+10] deals with planar sets of less-portion of convex hull of polygon and proved that the hull can function in a same way compared to the sorting algorithm of quicksort which requires many methods for some versions of points compared to Graham‟s algorithm. Verification also has been obtained which recommended that the hull was superior to the other sorting methods.
Table 1: Parameters of Third Dimension
New image Cropped
Characteristic
Measurement lengthwise
(in mm)
Thickness (in mm)
Height (in mm)
Damaged portion category
Measure of damaged portion
7.0 2.0 2.3104 Crack Maximum damaged
area
1.15 1.0 1.7106 Crack Minimum damaged
area
19.0 28.5 > width Crack Maximum damaged
area
18.0 3.5 3.9431 Crack Maximum
damaged area
In M.Mohammed Sathik et al. [SP10], the fracture which is a break or crack in the bone of the medical images can be easily found in the damaged area. But may not be possible due to lack of sufficient details needed to diagnose. Hence these images can be enhanced by adding the color map. The method in this paper produces different bit level images wherein the Bit Level 6 is evaluated for Red Green Blue colors of the Original image and it is evaluated with the Bit level 6 of the original image. Thus the result shows that the colored X-Ray image Bit level 6 yield more details than the Bit level 6 of gray scale X-Ray image.
T. Ashok Kumar et al. [APP12] facilitates and improves diagnosis in various ways by applying key stages of image processing in ocular fundus images. Optic disc and macula which are the main landmarks for an image registration that is vital has been considered for the better follow up of retinal images. From the background, the proposed algorithm [EBPFA] is given in figure 3 which will perform efficiently compared to other techniques. And the block diagram discuss about the phases of median filter with bit plane slicing,convex hull, shape recognition which will be given for further investigation of reconstruction of images.
Fig. 3: Block diagram of the Efficient Bit Plane Filtering Algorithm-EBPFA
3.
BIT PLANE FILTERING METHOD
3.1. Preprocessing of an Image
The preprocessing of an image using median filter for better quality is performed as follows:-
3.1.1. Median:
Median Filter is used one of the nonlinear filtering methods that can be used to remove noise from an image which becomes as a processing step to carry out for the further phases. And it stores edges by removing noise and hence enhanced the image.
Median Filter Bit Plane Filter Algorithm Convex Hull
Method
Method/shape recognition Reconstruction of Images
Histogram Method/Threshold Input
Image
Mathematical Techniques
Original Image Enhanced Image
Fig. 4: Enhanced Image
Noise can be in the form of bright pixels or dark pixels with uneven distribution of pixels in the image. Noise can affect the image with the filter based on two aspects of the spatial extent of the neighborhood and the pixels going to take part in the computation.
3.2. Bit Plane Filtering Algorithm
A bit plane of an image can be divided into a set of bits corresponding to a given bit position in each of the 0‟s and 1‟s which gives an image which can be used to divide them into slices to find the bit planes. Those bit planes are used to divide the entire image into slices to find out the trivial information of the image.
The illustration for 8 bit value 10011011 will become as 155 in decimal values which is computed as and can be computed with as cartisioning the bit value cartisioned with POW of base 2 to the required positions of bits. Pre-processing the image should be carried on for the detection and extraction of the significant features, Ersin Gose, Andres Frıas-Velazquez et al. [Gos11, FP10].
Hence, the first bit plane gives an image with more distortions and thereby reducing plane by plane to medium and thus gives the final stage as a value of 2(m-n). As a result, adding a bit plane gives a better approximation as that of different bit plane methods T. Ashok Kumar et al. [APP12]. In the figure 11, sample output of the bit plane is shown.
An important thing of using bit planes is to find the resultant bit plane with random noise or with trivial information.
Algorithm: Bit Plane Algorithm Input Image:
Declare n, m of an integer variables and matrix and pixels of array variables
The variable „i‟ should be incremented and count the number of 1‟s in the first 3 most significant bit planes. Then apply the procedure and compute mean value for the declared array by applying binary addition operator.
for the computed mean value, we have to replace the center pixel that should be iterated for the entire image.
We can thus remove noise by preserving edges of the image. For every row and column, the algorithm is iterated, till measurement lengthwise < than n and m
Procedure for (row to n) for (col to m)
Raster rst = img.getRaster(); gL = rst.getSample(r,c); mat[r][c] = gL;
s=IntegertoBinary((int)matrix[r][c]); leng = obj.length()-1;
boolean b == false; leng2 = 7;
if(leng<7)
b = true; i=leng; while(i>=0) {ch = s.charAt(i);
x= Character.getNumericValue(ch); if(b=false)
assign x to pix[cnt][i] ; else
if(b=true){
assign x to pix[cnt][len2]; }}cnt++;}}
and to get the bit planes declare the bit 0 to bit 7 array variables,
as bit0 = new int[(r*c)]; to bit7 = new int[(r*c)];
Initialise values of pixels, pix[i] {0,1,2,…7} initially, updated by bit planes
loop number , i {0,1,2,….n*m}, initially 0, will be instantiated to a integer value.
sub_module:
Initialise values of pixels, i=r*c; Start the procedure with bit 7// BIT 7 i=0; while(r*c){bit[i] = pix[i][0];} and end till bit 0 //BIT 0
j=0; while (r*c){ bit[j] = pix[j][7];}
3.3. Equalization of Histogram
We represent the gray levels of the image to be improved by declaring R as a variable which should be standardized to the interval [0,1] with R=0 in place of black and R=1 instead of white. In a while, we observe as a discrete formulation and agree to pixel values which should be in the interval [0,l-1] where l is the maximum gray level value.
We focal point on conversion of the type for any R fulfilling the abovementioned circumstances,
S=t(R) 0 ≤ r ≤ 1 (3.3.1)
which generates a intensity „S‟ for each and every pixel rate „R‟ in the creative image. t(R) which is a conversion method assuring the below constraints:
(a)t(R) is single - valued and monotonically increasing in the interval 0≤ R ≤1;
and
„R‟ and „S‟ are random operators where Pr(r) and Ps(s) refer to the probability density methods where the subscripts on P has been given to note that Pr and Ps are various methods discuss with probabilities and additions as a substitute of probability density methods and integrals. The probability of frequency of gray level Rk in an image is estimated by
Pr(Rk) = Nk/N k = 0,1,2,…, l – 1 (3.3.3)
Thereby, N stands for the total number of feasible gray levels in the image, Nk can be the number of pixels which have gray level Rk and l is the sum number of likely gray levels in the image. The transformation method of discrete description can be known in equation (1.2) is
Sk = T(Rk) = ∑ Pr(Rj) = ∑ Nj/N k = 0,1,2,., l– 1 (3.3.4)
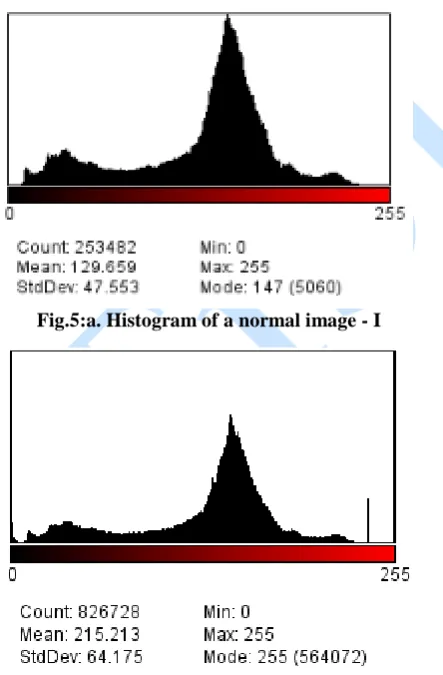
Hence, mapping every pixel with level Rk in the input image into a equivalent pixel with height Sk in the output image has lead to a processed image via Eq. (4.3). The design of Pr(Rk) vs Rk is known as histogram equalization of histogram or linearization of histogram,M.Mohammed Sathik et al. [SP10].
Fig.5:a. Histogram of a normal image - I
Fig.5:b. Histogram of a normal image - II
3.4. Thresholding
Processing boundaries of objects can be otherwise called as Thresholding. The process will be as taking
one random image and mapping all the pixels of the image whose values fall between a low value to a high value and computing the destination image by comparison of distant various bands
.
Fig. 6:a. Original image - I with threshold
Fig.6:b. Original image - II with threshold
Process: Threshold
We have to get a variable of „T‟ that should be assigned to a intensity. And give the loop with minimum and maximum intensity values of the image which will find the mid point as an initial estimate, then segment the image using „T‟ value and thereby getting the edge points. The full process should be applied for the entire image till edge points have been detected. We compare the various threshold techniques as normal, otsu, fuzziness for better slicing of images as given in the table below:-
Table 2: Comparison of the threshold techniques
Bit Plane Nos.
Normal Threshold
Otsu Threshold
Fuzziness Threshold
Zero 127.8814 45 127.5
One 127.8570 41 126.0
Two 127.8709 49 129.5
Three 127.8514 42 126.5
Four 127.8127 38 125.5
Five 127.8137 43 130.5
Six 127.8168 41 127.0
Seven 127.8168 41 127.0
Enhanced Image
126.3744 57.2365 127.5
Original Image
Edge points have to be found by highest modulus of the gradient vector in the path to which the gradient vector points in the image plane, Zhonghua Iiu Qilong wang [ZQ00].
Threshold can be set for a thorough intensity value with threshold techniques. The midpoint between the minimum and maximum intensity values in the image can be used for the purpose of initial estimate with final midpoints. Two groups will be formed with the segmentation by using threshold.
Proper classification to the pixels of the image into classes has been done by applying the structuring elements.
Thereby the characteristics of the damaged portion can be cropped from the image with the differed horizontal structuring element by performing the set difference operation.
We have to get each and every pixel, whose intensity value exists below a considered particular intensity assessment.
The damaged portions can be attained by finding a particular intensity assessment that exists below the previous value using threshold technique, P.Swarnalatha et al. [ST12].
3.5. Comparative Analysis of Mathematical Statistical Techniques
The different mathematical statistical methods can be applied on the bit-plane to get the efficiency of the Efficient Bit Plane Filtering Algorithm-EBPFA, Ioannis Pitas,Anastasios N et al., Chuan-Yu Cho et al. [PV86, C+05].
3.5.1. Mean:
The mean can be also known as standard that can be calculated as the total of each and every of the experimental results from a trial that has to be divided by the total number of events using „x‟ as given below:-
n i x n x 1 1 (3.5.1.1)where „n‟ stands for sample size and „x‟ for the experimental valued.
3.5.2. Variance and Standard Deviation:
The techniques Variance and Standard Deviation are used to find average, „x‟ which have to be read and subtracted from each experimental value to a table format. Later we have to square the differences and added to the result in a table column. Lastly, by dividing the resultant value by n-1 thereby getting the variance. And we have to find the square root of the variance to compute the standard deviation.
The variance can be calculated as
2 1 2 ) ( 1 1
n i x x n S (3.5.2.1)and the deviation of standard as
n i x x n S 1 2 ) ( 1 1 (3.5.2.2)Table 3: Comparison of Various Mathematical Statisitical Methods
Bit Plane
Nos. Mean
Standard
Deviation Variance
Zero 167.2938 119.3411 127.5
One 167.3954 119.2858 126.0
Two 167.8989 119.1347 129.5
Three 169.8941 118.4416 126.5
Four 172.4774 117.4697 125.5
Five 173.6710 117.0018 130.5
Six 173.7286 116.9788 127.0
Seven 173.7286 116.9788 127.0
Original Image
129.7129 46.6369 102.5
The bit plane filter algorithm using various mathematical statistical techniques has been given in the figure 11. And the output yields better slicing of images with different threshold types needed for the convex hull which is an intersection of all convex sets.
4. CONVEX HULL METHOD
We can term convex hull of a known set „X‟ as given below:
The convex hull is described as a set „X‟ of dots in the Euclidean plane that outputs the minimum convex set which contains „X‟, and be known as the convex sets with the least value, etc. And the least convex set „X‟ contains, the combination of a finite point set „S‟. Thereby, we can get the set of each and every convex arrangement in the connection of sets.
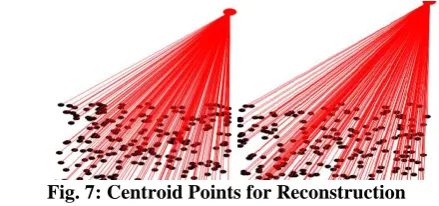
Fig. 7: Centroid Points for Reconstruction
The convex hull is the arrangements of points which represents for each and every point of set „S‟.
k i i k i i i iix x S x R
Note: The combination of all coefficients, αi, should be non-unconstructive.
A polytope of convex in Rn is formed from the hull
of a finite set PRn, where every pP such that p Conv(P \ {p}) is known as term vertex. By the way, a polytope of convex ofRn is the convex hull of their vertices.
And if the dots are on a line means, the convex will be the line segment that joins the two dots at the outermost. The convex is a polygon if and not only each and every dots will be on the line of the planar case.
In the same way, the least polyhedron which contains all the dots in the set will result in three dimensions hull.
Fig.8: a – 3D Visualization of the convex hull image-I
Fig.8: b – 3D Visualization of the convex hull image-II
5. INVESTIGATIONAL OUTCOME
The outcome of the experiment is the execution of two sets of algorithms that have been executed to explain the efficiency and effectiveness of EBPFA and convex hull. First, we have divided the images into planes using EBPFA and thereby reducing the noise by applying on images. The different mathematical statistical methods were applied on the bit-plane to get the efficiency of the Efficient Bit Plane Filtering Algorithm-EBPFA. And we compare the various threshold techniques to have better quality image. Next, we tested the convex hull algorithm on a set of finite points on different applications which will be considered in future for further life cycle of an image.
6. CONCLUSION AND FUTURE WORK
In this paper, we introduced Efficient Bit Plane Filtering Algorithm which divides the image into planes based on the filtered points and extraction of information needed for further process. And noise
detection has been obtained by applying median filter. The enhanced image has been made for bit plane filter algorithm using various mathematical statistical techniques with different threshold types. And in future, the author‟s aim is to reconstruct the image with the help of the output of convex hull algorithm to get better interpretation of dimensions.
Fig.9:a. Graphical Representation of three threshold techniques
Fig.9:b.Graphical Representation of mathematical techniques
REFERENCES
[APP12] T. Ashok Kumar, S. Priya, Varghese Paul – Automatic Feature Detection in Human Retinal Imagery using Bitplane Slicing and Mathematical Morphology, European Journal of Scientific Research, ISSN 1450-216X Vol.80 No.1 2012, pp.57-67
[BK01] C. Böhm, H. P. Kriegel – Determining
the Convex Hull in Large
Multidimensional Databases, Int. Conf. on Data Warehousing and Knowledge Discovery (DaWaK), 2001, pp.1-10. [BV06] J. Biswas, M. Veloso – Fast Sampling
Plane Filtering, Polygon Construction and Merging from Depth Images,
http://www.cs.cmu.edu/~mmv/papers/12
iros-BiswasVeloso.pdf
[C+05] C. Cho, H. S. Chen, J. N. Hwang, J. S. Wang – A Fast Bitplane Combination Algorithm for Bitplane Coded Scalable
Image/Video, IEEE International
Symposium on Circuits and Systems, 2005, pp. 3419-3422.
[FP10] A. Frıas-Velazquez, W. Philips – Bit-Plane Stack Filter algorithm for Focal
Plane Processor, 17th IEEE
International Conference on Image Processing, 2010, pp.1-5.
[Gos11] E. Gose – Adaptive Wiener-turbo systems with JPEG & bit plane compressions in image transmission, Turk J Elec Eng & Comp Sci, Vol.19, No.1, 2011, 1003-461, pp. 141-155. [PV86] I. Pitas, A. N. Venetsanopoulos –
Nonlinear Mean Filters in Image Processing, IEEE Transactions on
Acoustics, Speech and Signal Processing, Vol. ASSP-34, No. 3, June 1986, 00, 573-584.
[SF06] S. K. Sinha, Paul W. Fieguth – Automated detection of cracks in buried concrete pipe images, Automation in Construction, 15, (2006), pp. 58-72. [SP10] M. Mohammed Sathik, N. Ravia
Shabnam Parveen – Feature Extraction on Colored X-Ray Images by Bitplane Slicing Technique, International Journal of Engineering Science and Technology, Vol. 2(7), 2010, 2820-2824.
[ST12] P. Swarnalatha, B. K. Tripathy – A
Centroid Model for the Depth
Assessment of Images using Rough Fuzzy Set Techniques, International Journal of Intelligent Systems and Applications, Issue 2, Volume 1, ISSN: 2249-9954, Page Nos. 20-26, March 2012.
[S+09] P. Swarnalatha, M. Kota, N. R. Resu, G. Srivasanth – Automated Assessment
Tool for the Depth of Pipe
Deterioration, IEEE International Advance Computing Conference, 2009, pp. 721-724.
[ZQ00] L. Zhonghua, W. Qilong – Edge Detection and Automatic Threshold
Based on Wavelet Transform,
Proceedings of the 17th IEEE Instrumentation and Measurement Technology Conference, 0-7803-6401, 2000, pp. 1048-1053.
[Z+10] X. Zhang, Z. Tang, J. Yu, M. Guo – A Fast Convex Hull Algorithm for Binary Image, Informatica 34, 2010, pp. 369– 376.