Published online 20 October 2014 in Wiley Online Library (wileyonlinelibrary.com). DOI: 10.1002/wcm.2552
RESEARCH ARTICLE
A gradient-based multiple-path routing protocol for
low duty-cycled wireless sensor networks
Jie Hao1, Zheng Yao1*, Kui Huang2,3, Baoxian Zhang1and Cheng Li4
1Research Center of Ubiquitous Sensor Networks, University of Chinese Academy of Sciences, Beijing 100049, China 2Jiangsu Internet-of-Things Research and Development Center, Wuxi, Jiangsu 214135, China
3Institute of Microelectronics, Chinese Academy of Sciences, Beijing 100029, China
4Faculty of Engineering and Applied Science, Memorial University, St. John’s, NL A1B 3X5, Canada
ABSTRACT
Routing in a low duty-cycled wireless sensor network (WSN) has attracted much attention recently because of the challenge that low duty-cycled sleep scheduling brings to the design of efficient distributed routing protocols for such networks. In a low duty-cycled WSN, a big problem is how to design an efficient distributed routing protocol, which uses only local network state information while achieving low end-to-end (E2E) packet delivery delay and also high packet delivery efficiency. In this paper, we study low duty-cycled WSNs wherein sensor nodes adopt pseudorandom sleep scheduling for energy saving. The objective of this paper is to design an efficient distributed routing protocol with low overhead. For this purpose, we design a simple but efficient hop-by-hop routing protocol, which integrates the ideas of multipath routing and gradient-based routing for improved routing performance. We conduct extensive simulations, and the results demonstrate the high performance of the proposed protocol in terms of E2E packet delivery latency and packet delivery efficiency as compared with existing protocols. Copyright © 2014 John Wiley & Sons, Ltd.
KEYWORDS
hop-by-hop routing; sleep scheduling; multiple-path routing; wireless sensor network *Correspondence
Zheng Yao, Research Center of Ubiquitous Sensor Networks, University of Chinese Academy of Sciences, Beijing 100049, China. E-mail: [email protected]
1. INTRODUCTION
Wireless sensor network (WSN) has been a hot topic and has attracted great attention in recent years because of its promising unlimited applications such as security and environment monitoring. Energy-use efficiency is always a primary issue in WSNs because most sensor nodes are typically battery-powered and difficult or impossible to replenish. Many research work has been carried out to pursue high energy-use efficiency [1–6]. Duty-cycled sleep scheduling is an effective and widely used strat-egy for energy saving and consequently network lifetime prolongation. With this strategy, sensor nodes in the net-work may switch off their radios when no communica-tion task is in process to avoid wasting energy for idle listening.
Duty-cycled sleep scheduling, however, can introduce high packet delivery latency. In a duty-cycled WSN, a packet holder has to wait (i.e., buffer its packet to send) until its target receiver wakes up. Accordingly, the end-to-end (E2E) packet delivery latency is determined by the
sleep schedules used at nodes involved plus the queu-ing time, transmission time, and channel access time. The E2E packet delivery latency in a duty-cycled WSN may be many times than in an always-on WSN. However, E2E packet delivery latency is also an important measure for evaluating the service quality of a WSN, especially for some time-critical monitoring applications. Efficient routing protocols for low duty-cycled WSNs are highly desirable, in order to achieve low E2E packet delivery latency and also high packet delivery efficiency.
The design of efficient hop-by-hop routing protocols for duty-cycled WSNs has been a hot issue, and many proto-cols have been proposed in this field. The protoproto-cols in this area focus mainly on how to improve the E2E delay and/or energy-use performance. These protocols use either loca-tion informaloca-tion or gradient informaloca-tion of nodes to help route selection, and they can be accordingly divided into two types: geographic routing and topology-based rout-ing. In geographic routing, each node currently holding a packet to transmit makes a localized forwarding deci-sion based only on the locations of its own, its neighbors,
and packet destination, and also sleep schedules of its neighbors. It has the advantages of high robustness and scalability. However, it usually needs additional hardware devices such as GPS receivers or certain localization tech-nologies to obtain the locations of nodes, which are not always practical in low-cost WSNs. In topology-based routing, establishment of gradient information of nodes is in general required via global network dissemination of signaling messages initiated by sink node(s). The gradi-ent information can be either E2E delay or hop distance from each sensor to sink. This information will be used for guiding the per-hop packet forwarding behavior of sensor nodes.
In this work, we propose a distributed gradient-based multipath routing protocol (GMRP). The design objective is to achieve low E2E packet delivery latency and high packet delivery efficiency. GMRP requires very limited routing information to be kept at nodes in the network. The major contributions in this work are three folds. First, we introduce a concept of gradient-based multipath routing that is effective for achieving efficient routing and low pro-tocol overhead. In this paper, multipath routing is designed to finding multiple path segments leading to expected gra-dient progress instead of E2E multiple paths connecting a pair of source and destination nodes as carried out in conventional multipath routing protocols. Second, we com-bine gradient-based multipath routing and predictive sleep scheduling into hop-by-hop forwarding decision making, in order to achieve a good tradeoff between E2E latency and packet delivery efficiency. Third, we carry out exten-sive computer simulations, which demonstrate the high performance of GMRP regarding E2E latency and packet delivery efficiency.
The remainder of this paper is structured as follows. In Section 2, we briefly review related work. In section 3, we present the network model under study and then for-mulate the routing problem to be addressed. In section 4, we first give the intuition behind the idea of gradient-based multipath routing in GMRP and then present the detailed procedure of the protocol. In section 5, we conduct extensive simulations, which demonstrate the high perfor-mance of GMRP by comparing it with existing protocols. In section 6, we conclude this paper.
2. RELATED WORK
Design of efficient routing protocols for duty-cycled WSNs in general includes two fundamental issues: sleep schedul-ing and route selection. Next, we shall introduce typical protocols in these two aspects, respectively.
There are in general two kinds of duty-cycled scheduling in existing work: coordinated sleep scheduling and asyn-chronous sleep scheduling. Coordinated scheduling means that neighboring sensor nodes cooperate with each other to meet some communication requirements, for example, neighboring nodes must have active time(s) overlapped. Asynchronous scheduling means that each network node arranges its own sleep schedule independently.
Sensor medium access control (S-MAC) [7] and time-out medium access control (T-MAC) [8] are two typical duty-cycled protocols adopting coordinated sleep schedul-ing. According to these two protocols, network nodes are organized into virtual clusters, nodes in the same virtual cluster synchronize their sleep schedules, and they wake up simultaneously and stay active for a certain period for communications. Those nodes simultaneously belonging to two (neighboring) virtual clusters wake up according to the sleep schedules of both clusters, and they serve as bridging nodes for communications between neigh-boring virtual clusters. In coordination sleep scheduling algorithm (SPAN) [9], some nodes are elected to stay active and perform routing of packets, while other nodes are considered redundant and permitted to go to sleep to save energy. In asynchronous wakeup protocol [10], all nodes run a wake-up scheduling function so that neighbor nodes have active period overlapped for communications. In general, all coordinated sleep-scheduling protocols need local information exchange among neighbor nodes for time synchronization. Asynchronous sleep-scheduling pro-tocols (e.g., berkeley media access control (BMAC) [11] and short preamble medium access control (XMAC) [12]) do not require time synchronization. In such protocols, each network node periodically wakes up and then checks the channel activity (for a very short period) indepen-dently. Each packet sender uses a long preamble signal to notify its potential receiver(s). The transmissions of pream-ble signals often consume a large portion of nodal energy consumption and occupy the channel for a long time. To address this concern, WiseMAC [13], PW-MAC [14], PowerNap [15], and so on adopt predictive sleep schedul-ing. Each node predicts its neighbors’ wake-up times for channel checking so that a sender only needs to wake up slightly earlier than its target receiver and then transmits its data. In WiseMAC, each node wakes up periodically and independently where its wake-up offset in a frame (wake-up period) is set according to the node’s ID/MAC address PW-MAC and PowerNap carry out pseudorandom sleep scheduling in a way such that each node schedules its wake-up time according to a pseudorandom number generation (PRNG) algorithm. Each node can predict the wake-up time of each of its neighbors with the PRNG algo-rithm, and their respectively used seeds. Predictable sleep scheduling can efficiently reduce the time for idle listening and thus prolong the network lifetime. For more MAC pro-tocols in the area of sleep scheduling, please see the work in [16] and references cited therein.
Routing protocols in duty-cycled wireless sensor net-works can be divided into two types [17]: geographical routing and topology-based routing. Geographical rout-ing protocols utilize the location information of a packet sender, its neighbors, and that of packet destination for guiding hop-by-hop packet forwarding. Topology-based routing protocols usually first establish the gradient infor-mation of each sensor node in terms of E2E delay or hop distance to sink by using network-wide dissemination of control messages originated by sink node(s) and then use
such gradient information to guide each node to make localized decision on data packet forwarding. Next, we shall respectively introduce typical protocols belonging to either type.
Typical protocols for geographical routing include ran-dom asynchronous wakeup (RAW) [18], cost efficient anycast-based forwarding protocol (CAF) [19], and tun-able geographical forwarding protocol (TGF) [20]. RAW employs randomized sleep scheduling and selects any active neighbor with a distance progress higher than a given threshold towards the sink when making forwarding decision. RAW is suitable for dense sensor networks, and its use of greedy forwarding for packet delivery may gen-erate the routing void problem, in which case, there exists no neighbor node closer to the destination than the current packet holder. CAF that combines opportunistic routing and location-based routing. In CAF, a sender first transmits a long preamble and then a short request-to-send packet neighbors receiving these signaling messages that com-pete for the forwarding opportunity while meeting given E2E latency and energy consumption requirement. TGF adopts opportunistic forwarding as well, and it considers the forwarding progress and delay tradeoff when making forwarding decision. Specifically, TGF models an oppor-tunistic forwarding process as a Markov decision-making process. Based on this model, a sender always selects the neighbor, which leads to the minimum expected wait delay while still meeting given progress constraint, as the next hop forwarder. All the above three protocols belong to opportunistic routing protocols such that each packet holder selects its next packet forwarder based on its current local network state. An advantage of geographic routing protocols is that they only need local information and thus are scalable and robust.
Typical topology-based routing protocols for duty-cycled WSNs include fast time-dependent shortest path algorithm (FTSP) [21], delay-sensitive forwarding deci-sion-making mechanism (DFDM) [22], and lukewarm potato protocol (LP) [23]. Among these protocols, FTSP and DFDM use E2E delay to sink as gradient information, while LP uses hop distance to sink as gradient informa-tion for guiding packet forwarding. FTSP is targeted to find the least-delay paths for each sensor node to reach the sink node in the network in periodically duty-cycled wireless sensor networks wherein the duty cycles of dif-ferent sensor nodes can be difdif-ferent. FTSP calculates the least-delay paths from every sensor node to the sink node in polynomial time. DFDM first calculates the expected E2E delay from each sensor node to the sink node in the network recursively based on the expected E2E delay of its neighbors in an iterated manner. The forwarding deci-sion contains two actions: send to the thus far best active neighbor node or wait for a potentially better one (among those neighbor nodes who are still sleeping). A packet sender needs to make a comparison between the delays incurred by these two actions and then selects the one leading to less delay. The delay-oriented gradient infor-mation establishment processes in both FTSP and DFDM
are to some extent complicated, and they only consider how to minimize E2E latency without considering energy-use efficiency. LP is a protocol relevant the most to our proposed protocol in this paper. LP performs biased ran-dom walk routing on a pre-built shortest path tree. In LP, sensor nodes randomly choose their active slots and also maintain their neighbors’ sleep schedules. To improve the E2E delay performance of shortest path tree (e.g., min-hop tree), the per-min-hop forwarding makes reselection on the parent node for packet delivery to the sink node. The LP protocol uses a thresholdTto control the tradeoff between energy cost and E2E delay in each individual packet deliv-ery. A packet holder will reselect its next hop node if the wait time to reach its parent node on the pre-built shortest path tree exceeds the given thresholdT. If that happens, the packet holder will change its next hop node into the neigh-bor leading to the minimum wait time. In addition, among the previous three protocols, FTSP is a deterministic rout-ing protocol such that the least-delay path from every node to the sink node at any time is a deterministic path, which changes with time periodically, while DFDM and LP are opportunistic routing protocols.
3. NETWORK MODEL AND
PROBLEM STATEMENT
In this section, we will first present the network model for our proposed protocol to work and then formulate the problem that we shall address in this paper.
3.1. Network model
In this paper, we study a WSN, whereN (N > 1) sen-sor nodes are randomly deployed in a square area and one or multiple sink nodes are responsible for collect-ing the sensed data. All nodes’ transmission ranges are assumed to be fixed and are the same. Sensor nodes are battery-powered, while the sink node(s) are assumed to have unlimited energy supply so that the sensor nodes work with low duty cycles and sink node(s) stay active all the time. When a sensor node has data to report, it will choose a nearby sink node and send its sensed data to the sink directly or via a multi-hop path based on the distance between them.
In this paper, we assume that time is slotted and synchro-nized. Slot is the minimum time unit for nodes to schedule their sleeping and active periods so that its duration is set long enough for the transmission of one data packet. Typ-ically each time, a node stays active for at most one slot. Further, each node schedules its active slots to check chan-nel activity independently and in a pseudorandom manner. Without detecting any channel activity, a sensor node will go to sleep until its next active slot arrives. Sensor nodes in the network perform pseudorandom scheduling, which means the interval between two adjacent active slots (for checking channel activity) of a sensor node, denoted byd, is generated by using PRNG algorithm. In another words,
for a network node, if it is active at slott, then its next active slot will be scheduled at slottCdwhered2Œ1,F
(Fis a positive integer).Fis a network parameter deter-mining the duty cycle of sensor nodes in the network. In this work, in order to reduce the complexity of active-slot prediction, all nodes are assumed to use the same PRNG algorithm but different seeds that could be initialized as a function of nodes’ network IDs or MAC addresses. Thus, when a node knows a neighbor node’s network ID or MAC address, it can predict the neighbor’s next active slot and calculate the wait time if it chooses to send one of its buffered packets to the neighbor provided that they are synchronized. The previous way of sleep scheduling also makes it easy to tune the duty cycle of sensor nodes according to the application requirement, and every neigh-bor node’s next active slot can also be easily predicted. Compared with periodic sleep scheduling, pseudorandom scheduling can avoid neighboring nodes to keep waking up simultaneously that (if happens) might cause continu-ous transmission collisions. Pseudorandom scheduling has attracted much attention recently and is adopted in some existing work (e.g., PW-MAC [14] and PowerNap [15]). For two neighbor sensor nodes to exchange data, the send-ing node has to wait until the receivsend-ing node wakes up and then arranges an active slot identical to the receiving node’s next active slot in order to send the packet. Again, note that the active slots assigned for packet sending will not affect nodes’ sleep scheduling. Here, we would like to re-clarify that active slots of nodes should be solely decided by the PRNG algorithm and the nodes’ seeds (as the only input to the PRNG algorithm). Introducing traffic for sending as a second input into the PRNG algorithm will make other nodes in the network unable to predict the sending node’s future active slots and is thus not worthy.
3.2. Problem statement
The E2E transmission latency associated with a path P (denoted byLP/is the total time elapsed from the instant
when the source node generates a packet to the instant when the destination node receives the packet after
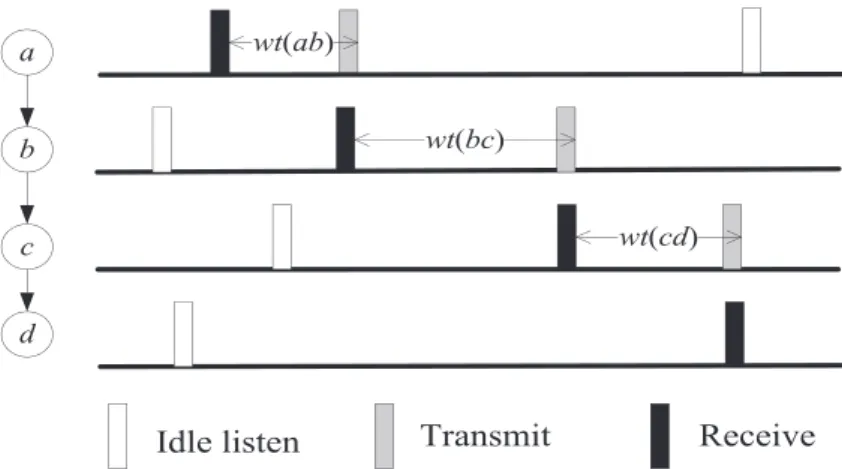
(pos-sibly) multi-hop transmissions along the pathP. Figure 1 shows an example of transmissions along a linear network topology. Suppose all the nodes follow their pseudoran-dom schedules and a packet is generated by source node aand needs to be delivered to destination noded. Node afirst schedules an active slot overlapped with nodeb’s next active slot for transmission (see the gray box). After receiving the packet, nodebthen schedules an active slot overlapped with nodec’s next active slot for transmission, and this process repeats until the data packet is delivered to its destination noded. For each node, its associated white and black boxes represent the active slots scheduled by its sleep-scheduling algorithm for it to listen (for the former) or to receive a packet (for the latter), whereas a gray box is a slot for transmitting a packet that is scheduled to overlap with its next hop’s next active slot. It is seen that the latency along this path isLP Dwt.ab/Cwt.bc/Cwt.cd/, where
wt.xy/represents the wait time for a nodexto transmit to its neighbor nodey.
Pseudo random sleep scheduling brings big difficulty for finding the least-latency path from a source node to a destination node. In theory, a least-latency path can also be computed by using a shortest path-routing algorithm such as Dijkstra’s algorithm on a time expanded graph of the original network. However, the shortest path calcula-tion in such a way needs global network state informacalcula-tion, which has the scalability issue and is not always practical for resource-limited WSNs. Design of simple but efficient hop-by-hop routing protocols utilizing local information is attractive for resource-constrained WSNs using pseudo random sleep scheduling.
In this paper, we propose an efficient hop-by-hop rout-ing protocol with limited local routrout-ing information kept at nodes. The design objectives are two folds: low E2E latency and also low total transmission number. In a wire-less multi-hop network wherein nodes’ transmission power is fixed and the transmission of each data packet spends the same amount of energy, the number of transmissions required for per E2E packet delivery also represents the total amount of energy consumed for the packet delivery. Based on this concern and with a slight abuse of notations,
in the rest of this paper, we will use the terms “num-ber of transmissions,” “num“num-ber of transmissions per packet delivery,” and “delivery efficiency” interchangeably unless otherwise stated.
4. PROTOCOL DESIGN
In this section, we will first present an overview of the GMRP protocol and then discuss in detail how it works.
4.1. Protocol overview
To achieve the goals of low E2E delivery latency and also high delivery efficiency, GMRP is designed to com-bine gradient-based forwarding and multiple paths routing. GMRP uses gradient information to guide the per-hop packet forwarding, which largely helps restrict the total energy consumption for each E2E packet delivery. Further, GMRP uses delay information as another metric for guid-ing packet forwardguid-ing that helps reduce the E2E packet delivery delay. The objective is to achieve a good trade-off between the E2E packet delivery delay and energy-use efficiency. To achieve this objective in GMRP, each node first uses its gradient information and also that of its neigh-bor nodes to build a set of multiple path segments towards its target sink node for guiding packet forwarding later and then makes localized forwarding decisions based on the sleep-scheduling information of nodes on these paths, in order to achieve a good tradeoff between E2E delivery delay and delivery efficiency.
In GMRP, each node (sayi/needs to gather and maintain the following information for the protocol implementation:
The gradient information of nodei. In this paper, we use the hop distance from each sensor node to its nearest sink node as the gradient associated with the sensor node.
A multiple path set that contains (at most)K.K1) based path segments. Each of the gradient-based path segments starts from the current nodei and ends at a node with gradient lower thanibyH, whereHis a predetermined threshold. We say that the gradient-based distance/progress associated with each such path segment isH. In case the gradient of the current nodeiis smaller thanH, each such path segment’s gradient distance will be the same asi’s gradient. The current node needs to keep a list of such path segments. Note that the rear nodes of different path segments are not necessarily the same node.K andHare protocol parameters and need to be tuned. Moreover, the hop distance associated with such a path (i.e., the number of hops on the path) may not be the same to its gradient distance.
Note that our proposed gradient-based GMRP is different from conventional multipath routing protocols, which build multiple E2E (either disjointed or partially disjointed)
paths. The gradient-based multipath routing in our pro-tocol returns multiple path segments with predetermined gradient progressH, that is, the path segments can termi-nate at any node with a lower gradient than the current node by H. The use of multiple path segments remark-ably reduce the overhead caused by the path set building and maintenance process. In order to achieve high rout-ing performance, the multiple path segments at each node should be selected in a way such that they are maximally node-disjointed. Moreover, to avoid excessive overhead for disseminating interest packets on unnecessarily long path segments, GMRP restricts the maximum hop distance of a path segment to be below.1Cı/H, whereıis a network parameter and ı > 0. That is, any path segment whose hop distance exceeds.1Cı/Hwill be directly discarded without any further processing.
When a packet holder makes a forwarding decision, it is expected to choose the path among its path set with both minimum path length (i.e., hop distance) and also min-imum delay to reach target sink. However, it is hard or impossible for a path to have both of such characteristics because path delay is in general independent of path hop distance. To achieve high performance in both delivery effi-ciency and E2E delay in GMRP, a path with longer path length can be chosen only if it can bring sufficient gain in terms of delay. For this purpose, in GMRP, each path segment is assigned an extra weight so that its weight is the delay associated with the path segment plus a penalty because of its associated extra path length (if any), which is the difference between the path’s hop distance and its gradient distance. The detailed weight calculating func-tion will be given in Secfunc-tion 4.2. The packet holder then chooses the path with the minimum weight among all its stored paths as the forwarding path. In this way, GMRP selects the path with a desirable tradeoff between E2E delay and delivery efficiency. Once the decision is made, the sender sends the packet to the first node on the selected path (segment) when that node wakes up. The node receiv-ing the packet will repeat the same operations earlier. This process repeats until the packet is delivered to its target sink node.
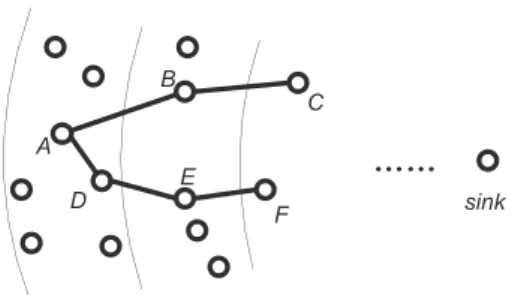
Figure 2 shows an example illustrating how the GMRP protocol works. In the example,K D 2 andH D 2. The nodes belonging to the same ring means that they have the same gradient. As shown in the figure, nodeAmaintains
Figure 2.A simple example illustrating the gradient-based mul-tipath routing in GMRP.
K D 2 path segmentsA-B-C andA-D-E-F, each having H D 2 gradient progress. Obviously, these two path seg-ments have different rear nodes but have the same gradient distance. When performing packet forwarding, we choose the path with lower path weight between the two path seg-ments. If the weight associated with pathA-B-Cis lower, AchoosesBas its next hop node. In addition, because the pathA-D-E-Fhas longer hop distance than its associated gradient distance, a penalty in path weight is suggested to be added for choosing such a path.
4.2. Protocol design
In this section, we give an overview on the implementation of the GMRP protocol. Specifically, we will first present how the gradients of nodes in the network are established and then how to build gradient-based multiple paths at each node in the network. Finally, we discuss how per-hop forwarding decisions are made when performing packet forwarding.
4.2.1. Routing information gathering.
In GMRP, the configuration phase starting immediately after the network deployment is responsible for the prepa-ration of the routing information required for GMRP to work correctly. In this subsection, we will first assume that there is only one sink node in the network, and we will then show that GMRP can be easily extended to work in multi-sink networks. The routing information gathering procedure in GMRP works as follows.
The sink node first creates an interest message and then floods it throughout the entire network. The interest mes-sage forwarded by a node ishould contain its gradient information and also its multiple path segments towards the sink node. Any sensor nodejreceivingi’s interest mes-sage extracts the “useful” routing information from the received message and accordingly updates its own routing information. The detailed updating procedure is as follows. Ifj’s gradient is greater thani’s gradient by more than one,jshould set its gradient asi’s gradient plus one.
A path segmentpD fn1,n2,: : :,igcarried ini’s interest message is considered to be “useful” if it meets the follow-ing conditions: (a) and (b) or conditions (a) and (c). If so, jwill accordingly record a new path segment into its own routing table based on path segmentp.
(a) The gradient ofn1is lower than that ofjby no less thanH, that is, there exists a nodenx 2 p, whose
gradient is lower thanjexactly byH.
(b) Currently,jhas less thanKpath segments in its rout-ing table, andpis node-disjoint withj’s locally stored path segments.
(c) p has smaller expected transmission count (ETX) [24] than the path segment with the maximum-ETX value inj’s routing table and is node-disjoint with the rest path segments.
For the former conditions that (a) and (b) are met, a new path segmentfnx,: : :,i,jgis inserted intoj’s path set; for
the latter condition that (a) and (c) are met, the new path segmentfnx,: : :,i,jgwill replace the path segment with
the maximum-ETX inj’s routing table. Every node waits for a certain period for establishing enough path segments, and then it composes its own interest message including its gradient and path segments. As the interest message is disseminated across the network, each node records its own gradient and (up to)Kmaximally node-disjoint paths in its routing cache. After that, it will not further transmit any duplicate interest message.
4.2.2. Procedure for packet forwarding.
When having a data packet to forward, a node should make a localized decision on the next hop based on its locally stored multiple path segments and also the sleep-scheduling information of nodes on these path segments. Here, we take the tradeoff between transmission number and delay into account. The use of pseudorandom sleep scheduling enables a node to calculate the delay associated with each path segment in its routing table, and also, the node knows the hop distance associated with each of the path segments.
The forwarding decision is opportunistic in nature because the decision can return different next hop for-warders because of the change of active slots of nodes on each of the multiple path segments towards sink. Recall that in opportunistic routing, the forwarding metric of a node is computed as the expected value of a concerned for-warding cost (in terms of delay, energy cost, delivery ratio, etc.) if a candidate is chosen as the forwarder. Likewise, we compute the delay along a path segment as follows. Given a pathPD fn1,n2,: : :,nlgwheren1,n2,: : :,nlare
the nodes constituent of pathP, the delay for forwarding a packet along pathPis calculated as follows.
wt.n1,n2,/Cq.n2,n3/wt.n2,n3/Cq.n2,n3/
q.nl1,nl/wt.nl1,nl/
(1)
whereq./is the packet success delivery probability asso-ciated with a link. The reason for computing path delay in this way is because GMRP is a hop-by-hop oppor-tunistic routing protocol. If the delivery between (n1,n2/ succeeds,n2will make its own forwarding decision accord-ing to its own routaccord-ing cache and n2 may choose another path different from the downstream subpath on P, then wt.nl1,nl/, 8l>3 play a limited role in the delay
com-putation (estimation). Further, transmission failure from n2 ton3 can also cause the same problem. In a word, in this way, the impact of subsequent hops on the estima-tion of path delay is reduced because of the potential route reselection and transmission failures.
In GMRP, to achieve a controllable balance between the number of transmissions and latency performance, we introduce a penalty factorDto adjust the tradeoff between latency and energy consumption. Among the multiple path segments, each progressingHgradients, the hop distance
associated with each such path segment is H or more. Intuitively, only using path delay as forwarding metric that GMRP will obtain the least average E2E latency but higher average number of transmissions per packet deliv-ery; instead, using number of transmissions per packet delivery as the forwarding metric, GMRP will achieve the least average number of transmissions per packet delivery but higher average E2E delay. To obtain a good tradeoff, GMRP restricts the selection of a longer path except that it can bring sufficient gain in terms of delay. So a longer path should yield certain penalty in delay estimation than a shorter path. Motivated by this consideration, we assign the weight associated with a pathPas follows.
W.P/DDPCextra_pathlengthD (2)
whereDP is the actual delay associated with pathP
cal-culated by using (1),extra_pathlengthisP’s hop distance minus its gradient distance, andDis a penalty factor, which can be tuned by application requirement. Based on (2), a sender chooses the path from its path set with the mini-mum weight as the forwarding path. In this way, GMRP selects the path with a good tradeoff between energy-use efficiency and E2E delivery delay. How the penalty factor Daffects the performance of GMRP will be explored in the simulation section.
Once the selected next hop receives the data packet, it will repeat the operations presented earlier by making its own forwarding decision based on its locally kept path set information. This procedure repeats until the data packet is delivered to its target sink node.
4.3. Performance analysis
In GMRP, choices of the parametersHandKhave signif-icant impact on the routing performance and also protocol overhead. HigherH andK mean that a node can utilize more routing information to choose its next hop but they also bring larger overhead. Thus, just choosing a largerH (without choosing larger K) makes a very limited sense in improving routing performance. This is because, for a meshed WSN, in general, largerHmeans that there exist larger number of paths connecting a node and the nodes with target gradient progress. Accordingly, if we restrict GMRP to choose only a very limited number ofKpaths, we will have high probability to miss good choices in selecting routes with low latency asHincreasing, which in return can hurt the routing performance. Recall again that all sensor nodes independently schedule their sleep and active slots. We will show later in the simulation section how to appropriately choose the values ofHandK.
The protocol overhead by GMRP is very low that mainly includes the communication overhead and storage over-head. Communication overhead is caused by the gradient and multiple paths discovery process, and storage over-head is caused by caching routing information at each sensor node. To reduce the communication overhead, every GMRP node is only allowed to broadcast an interest packet
at most once. Thus, one round of gradient and multipath discovery only needsO.N/interest messages, whereNis the number of nodes in the network. An interest message contains at mostK path segments, each of which has at most.1Cı/Hhops,ı >0. Consequently, the communi-cation overhead of an interest message for carrying suchK path segments isO..1Cı/KH/. Accordingly, the storage overhead at each node for storing suchKpath segments is O..1Cı/KH/as well.
4.4. Route maintenance
In a WSN, sensor nodes may die out of power or some new nodes may join the network so that the network topol-ogy changes with time. In this case, the multiple paths kept at nodes may be out of date, and the routing cache needs to be refreshed. Accordingly, route maintenance includes periodic maintenance and on-demand maintenance.
Periodic maintenance means that every node needs to send a beacon that only contains its own gradient and seed information periodically to notify its neighbors regarding its active status. Further, after a certain period, GRMP needs to reconfigure the gradient and path set of nodes in the network to catch up with potential network dynamics and also keep the synchronization of network nodes.
On-demand maintenance is for the case when a topol-ogy change happens. A change of topoltopol-ogy can be either a link creation or break. In GMRP, when a link is created, the route set cached at one end of the link will be sent to the other end of the link and this information will not be further advertised to other nodes in order to minimize the signaling overhead. If a new node joins the network, it will stay active and then listen to its neighbors on the newly created links and then builds its own gradient and route set for it to forward packets later. In comparison, a link break needs to be notified to all nodes using the broken link in their respective route sets. Accordingly, such a link break event will be disseminated to nodes downstream away from the current node at mostHgradients and at most.1Cı/H hops away. Note that any intermediate node not using the broken link in its own route set will stop disseminating the event further.
4.5. Discussions
From the previous description, we can see that GMRP can achieve high performance regarding E2E latency and deliv-ery efficiency with low overhead. In addition, GMRP is suitable for unreliable WSNs especially when bursty loss happens over wireless links. When a transmission fails, the packet holder will recompute the delay of each of the path segments in its routing table and make a brand new decision on the next hop selection based on the newly computed results. In this way, GMRP avoids the situation that the retransmission process repeatedly tries to send a packet to a given node over a bursty lossy link. Moreover, although in this paper we assume that time is slotted, the pseudorandom scheduling and route selection can release
this assumption. Thus, GMRP can support unslotted sleep scheduling as well. That is, GMRP can also work with very loose time synchronization among neighboring nodes like in PW-MAC [14].
In the previous discussion, we assume that the network under study has only a single sink. In reality, a WSN may have multiple sinks. In such a network, a packet could be transmitted to any sink. Obviously, the gradient and multi-path establishment process in a multi-sink WSN is similar to that in a single-sink WSN. It should be noted that in the routing information gathering process, nodes are only interested in the gradient and path information carried in received interest messages no matter which sink it is from. Thus, GMRP is suitable for WSNs with multiple sinks.
5. SIMULATION RESULTS
In this section, we aim to evaluate the performance of GMRP by conducting extensive simulations based on a
CCC-based event-driven simulator. We compare the per-formance in terms of average E2E latency and average number of transmissions for every individual E2E packet delivery. The packet success delivery rate associated with each link is set to be uniformly distributed in the range [0.7, 1]. Each value reported is an average result of different experiments.
We shall first tune the key parameters in GMRP. We then compare the performance of GMRP with other related protocols including min-hop routing, min-latency routing, and LP [23] in single-sink networks and in multi-sink net-works, respectively. To ease the reading, we summarize the key network and protocol parameters used hereafter in Table I.
5.1. Parameters tuning
In this subsection, we first evaluate that the impact of penalty factorDon routing performanceDis an important Table I. Parameter description.
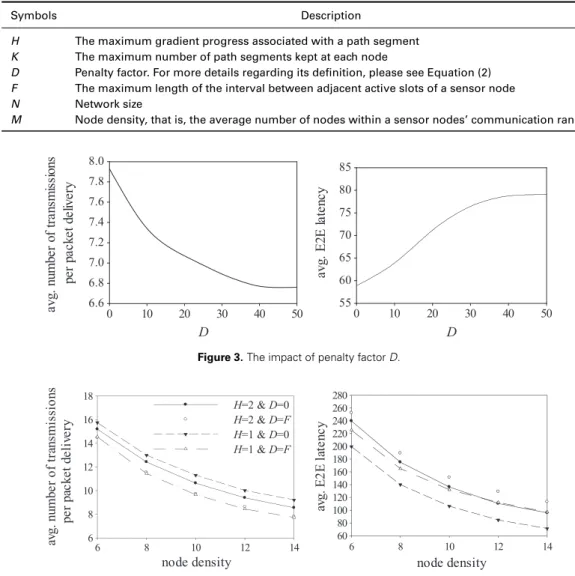
Symbols Description
H The maximum gradient progress associated with a path segment K The maximum number of path segments kept at each node
D Penalty factor. For more details regarding its definition, please see Equation (2) F The maximum length of the interval between adjacent active slots of a sensor node N Network size
M Node density, that is, the average number of nodes within a sensor nodes’ communication range
Figure 3.The impact of penalty factorD.
factor affecting the tradeoff between latency and energy performance. In Figure 3, we fixed H D 1,N D 400, KD5,FD50, andM D14 to observe the performance versus varying D. More specifically, the network consti-tutes ofN D 400 sensor nodes randomly deployed in a square area and one sink located in the center. The source sensor nodes are randomly selected. Each sensor node can keep at most K D 5 path segments each with gradient progressH D 1. Each sensor node performs pseudoran-dom sleep scheduling. That is, if a node wakes up at slott, its next active slot istCd, whered2Œ1,FandFD50. In Figure 3, we can see that with penalty factorD D 0, GMRP leads to the least delay but the maximum “aver-age number of transmissions per packet delivery.” AsD
increases, the average E2E delay increases, while average number of transmissions decreases. It is seen thatDD 0 and D D F are two extreme cases for the average E2E delay and average number of transmissions performance per packet delivery. In what follows, we will only plot the
performance of GMRP withD D 0 andD D F as two
extreme cases for GMRP’s performance in terms of the two measures under concern.
Figure 4 compares the performance of GMRP withHD
1 and 2 with changing node densityM. In the experiments,
we set N D 200 andF D 50. M has big impact on
the selection ofK. This is because higherM can lead to higherK. Thus, we setK D4 whenM <10 andK D5 when M 10. Based on our simulation results, further
Figure 5.Comparison of routing performance by different protocols versus node density.
Figure 6.Comparison of routing performance by different protocols versus network size.
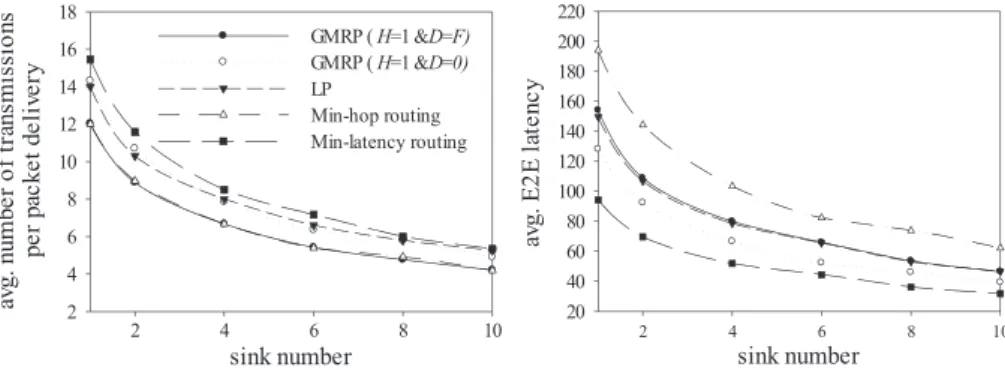
Figure 7.Comparison of routing performance by different protocols in terms of average E2E latency and average number of transmissions per packet delivery versus sink number.
increasingKleads to insignificant gain in terms of routing performance. In Figure 4, for GMRP (HD1 andDD0), we can see that it outperforms GMRP with other settings in terms of average E2E latency, while GMRP (H D 1 andD D F) and GMRP (H D 2 andD D F) perform the best in terms of average number of transmissions per packet delivery. The reason that higherHdoes not bring obvious performance improvement is that higher H but smallerK restrict the choices of low-delay paths among a potentially large number of candidate paths between a node and the nodes with target gradient progress, which makes the look ahead feature by choosing largerHhave limited role in improving routing performance. In addition, settingH D 2 causes higher overhead for routing infor-mation gathering and also leads to higher E2E latency than that ofHD1. Thus, in the following experiments, we will setHD1. Please note that the implementation of GMRP withHD1 is different from the case of simply forwarding each data packet to the next hop with the smallest one-hop delay among multiple choices on the minimum hop paths to reach the sink node. The reason is that in GMRP, a path segment with gradient progressH D 1 can contain more than one hop.
5.2. Performance comparison
This subsection simulates GMRP, LP [23], the min-hop routing protocol, and the min-latency routing protocol and compares their performance. The min-hop routing pro-tocol returns the minimum number of transmissions by building a shortest path with respect to ETX metric. Min-latency routing assumes that global scheduling information is known by each node to calculate its least E2E latency to sink. If an intermediate transmission fails, recalculation is immediately carried out to obtain a new least-delay path. Min-latency routing causes very high computation over-head and is impractical for resource-limited WSNs. The implementation of the latter two protocols can demonstrate the performance gap between different heuristics and the optimal solution in terms of the number of transmissions per packet delivery and E2E latency, respectively.
The LP protocol usually does not perform the best regarding the number of transmissions per packet deliv-ery and E2E latency simultaneously for a given threshold T. In LP, the selection ofT decides whether to primarily optimize hop count or E2E delay. In this paper,T is set to optimize E2E latency in the implementation of LP, and each node keeps up to three parents on its min-hop routes to reach sink. Please note that ifT is set to optimize the number of transmissions, then LP would approximate the min-hop routing protocol. As for GMRP, we only plot two curves for GMRP withHD1 andDD 0 andDDFas two extreme cases. Please note that the performance curves with differentDs will lie between the curve for GMRP
.DD0/and that for GMRP (DDF/.
Figure 5 plots the performance with varying node den-sities, and Figure 6 plots the performance change under varying network sizes. In Figure 5, we setN D 200, and
in Figure 6, we set the node densityM D10. In Figure 5, we can see that GMRP.D D F/performs close to min-hop routing in terms of average number of transmissions per packet delivery and comparable E2E latency with LP. GMRP.D D 0/returns lower average E2E latency and also smaller average number of transmissions per packet delivery than LP protocol. Figure 6 shows similar per-formance trend under varying network sizes. Generally speaking, Figures 5 and 6 show that by only using limited routing information, GMRP can achieve low average num-ber of transmissions per packet delivery and E2E latency in networks with various node densities and network sizes.
5.3. Extension to multi-sinks networks
In this subsection, we observe how GMRP behaves with increasing number of sink nodes. We set the network size N D 1000, and the sink number increases from 1 to 10. The locations of the sink nodes and source sensors are randomly selected. Figure 7 shows that GMRP (D D F/
performs close to min-hop routing in terms of average number of transmissions and lies between min-hop routing and min-latency routing in terms of E2E latency. GMRP
.DD0/returns average E2E latency close to min-latency routing and outperforms LP in terms of average number of transmissions per packet delivery. Thus, we can conclude that GMRP has high routing performance in multi-sink WSNs as well.
6. CONCLUSION
In this paper, we have designed a distributed routing pro-tocol GMRP for low duty-cycled WSNs. GMRP combines the idea of gradient-based routing and multiple-path rout-ing. It works in a hop-by-hop manner and only requires very limited routing information to be kept at nodes to achieve a good tradeoff between delivery efficiency and E2E latency. Extensive simulation results demonstrate that GMRP has high performance in terms of E2E delay and delivery efficiency.
ACKNOWLEDGEMENTS
This work was supported in part by National Natural Sci-ence Foundation of China under Grant Nos. 61471339, 61173158, and 61101133 and the Natural Sciences and Engineering Research Council (NSERC) of Canada (Dis-covery Grant 293264-12 and Strategic Project Grant STPGP 397491-10).
REFERENCES
1. Hung MCC, Lin KCJ, Chou CF, Hsu CC. EFFORT: energy-efficient opportunistic routing technology in wireless sensor networks. Wireless Communications and Mobile Computing2013;13(8): 760–773.
2. Song L, Zhang Y, Yu R, Yao W. QoS-aware packet forwarding in MIMO sensor networks: a cross-layer approach.Wireless Communications and Mobile Com-puting2010;10(6): 748–757.
3. Azim MA, Kibria MR, Jamalipour A. An optimized forwarding protocol for lifetime extension of wire-less sensor networks. Wireless Communications and Mobile Computing2009;9(1): 103–115.
4. Deng Y, Lin C, Wu D, Ren F. Relocation routing for energy balancing in mobile sensor networks.Wireless Communications and Mobile Computing 2013, DOI: 10.1002/wcm.2410.
5. Mokdad L, Ben-Othman J, Yahya B, Niagne S. Per-formance evaluation tools for QoS MAC protocol for wireless sensor networks.Ad Hoc Networks2014;12
(1): 86–99.
6. Ben-Othman J, Yahya B. Energy efficient and QoS based routing protocol for wireless sensor networks. Journal of Parallel and Distributed Computing2010;
70(8): 849–857.
7. Ye W, Heidemann J, Estrin D. An energy-efficient MAC protocol for wireless sensor networks. In Pro-ceedings of 21st IEEE International Conference on Computer Communications (INFOCOM 2002), New York, NY, 2002; 1567–1576.
8. Van Dam T, Langendoen K. An adaptive energy-efficient MAC protocol for wireless sensor networks. InProceedings of the 1st ACM International Confer-ence on Embedded Networked Sensor Systems (SenSys 2003), Los Angeles, CA, 2003; 171–180.
9. Chen B, Jamieson K, Balakrishnan H, Morris R. SPAN: an energy-efficient coordination algorithm for topology maintenance in ad hoc wireless networks. In Proceedings of the 7th ACM International Conference on Mobile Computing and Networking (MOBICOM 2001), Rome, Italy, 2001; 85–96.
10. Zheng R, Hou JC, Sha L. Asynchronous wakeup for ad hoc networks. InProceedings of the 4th ACM Inter-national Symposium on Mobile Ad Hoc Networking & Computing (MobiHoc 2003), Annapolis, MD, 2003; 35–45.
11. Polastre J, Hill J, Culler D. Versatile low power media access for wireless sensor networks. InProceedings of the 2nd ACM International Conference on Embedded Networked Sensor Systems (SenSys 2004), Baltimore, MD, 2004; 95–107.
12. Buettner M, Yee GV, Anderson E, Han R. X-MAC: a short preamble MAC protocol for duty-cycled wireless sensor networks. InProceedings of the 4th ACM Inter-national Conference on Embedded Networked Sensor Systems (SenSys 2006), Boulder, CO, 2006; 307–320. 13. El-Hoiydi A, Decotignie JD. WiseMAC: an ultra low
power MAC protocol for the downlink of
infrastruc-ture wireless sensor networks. In Proceedings of the 9th IEEE International Symposium on Computers and Communications (ISCC 2004), Washington, DC, 2004; 244–251.
14. Tang L, Sun Y, Gurewitz O, Johnson DB. PW-MAC: an energy-efficient predictive-wakeup MAC protocol for wireless sensor networks. In Proceedings of the 30th IEEE International Conference on Computer Communications (INFOCOM 2011), Shanghai, China, 2011; 1305–1313.
15. Soysal O, Ayyorgun S, Demirbas M. PowerNap: an energy efficient MAC layer for random routing in wire-less sensor networks. InProceedings of the 8th IEEE Conference on Sensor, Mesh and Ad Hoc Communi-cations and Networks (SECON 2011), Salt Lake City, UT, 2011; 10–18.
16. Demirkol I, Ersoy C, Alagoz F. MAC protocols for wireless sensor networks: a survey.IEEE Communica-tions Magazine2006;44(4): 115–121.
17. Hao J, Zhang B, Mouftah HT. Routing protocols for duty cycled wireless sensor networks: a survey.IEEE Communications Magazine2012;50(12): 116–123. 18. Paruchuri V, Basavaraju S, Durresi A, Kannan R.
Random asynchronous wakeup protocol for sensor networks. In Proceedings of the 2nd IEEE Interna-tional Conference on Broadband Networks (BroadNets 2004), San Jose, CA, 2004; 710–717.
19. Xue Y, Vuran MC, Ramamurthy B. Cost efficiency of anycast-based forwarding in duty-cycled WSNs with lossy channel. InProceedings of the 7th IEEE Confer-ence on Sensor Mesh and Ad Hoc Communications and Networks (SECON 2010), Boston, MA, 2010; 1–9. 20. Naveen KP, Kumar A. Tunable locally-optimal
geo-graphical forwarding in wireless sensor networks with sleep-wake cycling nodes. In Proceedings of 29th IEEE International Conference on Computer Commu-nications (INFOCOM 2010), San Diego, CA, 2010; 1–9.
21. Lai S, Ravindran B. On distributed time-dependent shortest paths over duty-cycled wireless sensor net-works. InProceedings of 29th IEEE International Con-ference on Computer Communications (INFOCOM 2010), San Diego, CA, 2010; 1685–1693.
22. Kim J, Lin X, Shroff NB. Optimal anycast technique for delay-sensitive energy-constrained asynchronous sensor networks. InProceedings of 28th IEEE Inter-national Conference on Computer Communications (INFOCOM 2009), Rio de Janeiro, Brazil, 2009; 612–620.
23. Beraldi R, Baldoni R, Prakash R. Lukewarm potato forwarding: a biased random walk routing protocol for wireless sensor networks. InProceedings of 6th IEEE Conference on Sensor, Mesh and Ad Hoc
Communica-tions and Networks (SECON 2009), Rome, Italy, 2009; 1–9.
24. De Couto DSJ, Aguayo D, Bicket J, Morris R. A high-throughput path metric for multi-hop wireless routing. Wireless Networks2005;11(4): 419–434.
AUTHORS’ BIOGRAPHIES
Jie Hao received her BS degree in Communication Engineering from Bei-jing University of Posts and Telecom-munications (BUPT), China, in 2007, and received her PhD degree in Com-puter Science from the University of Chinese Academy of Sciences, Bei-jing, China, in 2014. She has been a Research Fellow at Nanyang Technological University, Singapore, since August 2014. Dr Hao has served on technical program committees for international confer-ences and symposia such as IEEE GLOBECOM and VTC. She has published over 10 papers in refereed technical papers in archival journals and conference proceedings. Her research interests include design and evaluation of routing and scheduling algorithms for wireless sensor and ad hoc networks.
Zheng Yao received his BS degree in Computer Science and Engineer-ing from Xi’an Jiaotong University in 1991, and received his MS and PhD degree in Computer Application from Harbin Institute of Technology, China, in 1994 and 1997, respectively. He is currently a Full Professor at Research Center of Ubiquitous Sensor Networks, Univer-sity of Chinese Academy of Sciences. He has published over 20 papers in journals and conference proceedings. His research interests cover software engineering, open source software, wireless sensor networks, and internet of things.
Kui Huangobtained his PhD degree in 2005 from the Institute of Soft-ware, Chinese Academy of Sciences. In 2008–2010, he was an associate professor at Shanghai Institute of Microsystem and Information Technol-ogy, Chinese Academy of Sciences. He is currently a professor at the Institute of Microelectronics of Chinese Academy of Sciences. His research interests cover wireless communications and wireless sensor networks. He has published over 10 papers in journals and conferences, and he is the joint holder of many domestic patents in the area of Internet of Things. He
has published over 10 papers in journals and conferences, and he is the joint holder of many domestic patents in the area of Internet of Things.
Baoxian Zhang received his PhD degree in Communications and Infor-mation Engineering from Northern Jiaotong University, China, in 2000. He is currently a Full Professor at the Research Center of Ubiquitous Sensor Networks at the University of Chinese Academy of Sciences (UCAS), Bei-jing, China. Prior to joining UCAS, he was a Research Scientist in the School of Information Technology and Engineering, University of Ottawa, Canada. He has served as a guest editor of special issues including IEEE Jour-nal on Selected Areas in Communications, ACM Mobile Networks and Applications, Wiley Wireless Communica-tions and Mobile Computing, andElsevier Ad Hoc Net-works. He has served on technical program committees for many international conferences and symposia such as IEEE GLOBECOM and ICC. He has coauthored a book in Wireless Sensor Networksand published over 100 refereed technical papers in archival journals and conference pro-ceedings. His research interests cover network protocol and algorithm design, and wireless ad hoc and sensor networks. Dr Zhang is a senior member of the IEEE.
Cheng Li received the BEng and MEng degrees from Harbin Institute of Technology, Harbin, China, in 1992 and 1995, respectively, and the PhD degree in Electrical and Computer Engineering from Memorial Univer-sity, St. John’s, Canada, in 2004. He is currently a professor at the Faculty of Engineering and Applied Science of Memorial University, St. John’s, Canada. His research interests include mobile ad hoc and wireless sensor networks, wireless commu-nications and mobile computing, switching and routing, and broadband communication networks. He is an edi-torial board member of Wiley Wireless Communications and Mobile ComputingandJournal of Networks, and an associate editor ofWiley Security and Communication Net-works. He has served as a technical program committee (TPC) cochair for theIEEE WiMob’11andQBSC’10. He has served as a cochair for various technical symposia of many international conferences, including the IEEE GLOBECOM and ICC. He has served as the TPC mem-ber for many international conferences, including the IEEE ICC, GLOBECOM, and WCNC. Dr Li is a Registered Professional Engineer (PEng) in Canada and is a senior member of the IEEE and a member of the IEEE Commu-nication Society, Computer Society, Vehicular Technology Society, and Ocean Engineering Society.