International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 11, November 2013)
416
Position Control of DC Motor Using Arrtificial Bee Colony
Based PID Controller
Prakash varma
1, B. Anjanee Kumar
2 1Dept. of Electrical, RITEE, Chhattisgarh, India 2Assistant Professor, Electrical Dept., RITEE, Chhattisgarh, India
Abstract— DC drive techniques are typically used in many commercial applications such as robotics, actuation and manipulators. In the initially two, a wide variety of place administration is required. Adjusting means for PID operator is very important for the process sectors. Proportionate Important Mixture remotes have the advantage of simple framework, good balance, and great stability. Accordingly, PID remotes are commonly used to management program results, especially for techniques with precise statistical designs. The key issue for PID remotes is the precise and effective tuning of factors. The aim of this thesis is to study the Position management of DC motor using Synthetic Bee Community Criteria. To be able to fix this problem a PID operator under Synthetic Bee Community Criteria with self–tuning is used, which will perform best quality place management. The performance of Control Criteria is provided through a simulator and in contrast to the quality of PID operator. The suggested technique is in contrast to Ziegler Nichols technique. It is found that the suggested PID factors modification by the Synthetic Bee Community Criteria is better than the Ziegler & Nichols’ technique. This suggested technique could be used to the higher purchase program also.
Keywords—PID controller, Artificial Bee Colony (ABC),
DC Motor.
I. INTRODUCTION
In most of the commercial procedures like electric, technical, construction, oil market, iron & metal market, energy areas, development sites, paper market, drinks market, etc. the need for higher efficiency is putting new requirements on systems connected with electric engines. They lead to different problems in perform function due to fast characteristics and uncertainty. That is why management is needed by the system to achieve balance and to perform at preferred set objectives. The effective rate and position management of electric engines is of outmost importance due to various non-linear effects like load and interference that affected the engine to vary from its normal function. The dc (DC) engine is a device that used in many areas in order to turn energy into technical energy. This is all result from the accessibility to rate remotes is wide variety, easily and many ways. In most programs, rate management is very essential. For example, if we have DC engine in radio operator car, if we just apply a continuous energy to the engine, it is impossible to maintain the preferred rate.
It will go more slowly over bumpy road, more slowly continuous, quicker from top to bottom and so on. So, it is essential make a operator to management the rate of DC engine in preferred rate.
DC engine performs a significant role in modern market. The purpose of a engine rate operator is to take a indication comprising the required rate, and to drive a engine at that rate. There are numerous programs where management of rate is required, as in moving generators, cranes, hoists, elevators.
A.Optimizing Of PID Controller
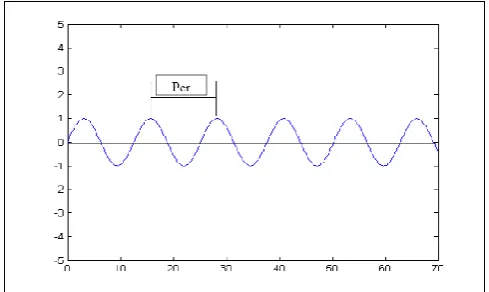
Zeigler & Nichols Method: For the program under research, Zeigler-Nichols adjusting concept depending on crucial obtains and crucial interval will be used. In this technique, the important time will be set to infinity and the mixture time to zero. This is used to get the preliminary PID establishing of the program. This PID establishing will then be further enhanced using the Primary Style method and Prolonged Style method.
In this technique, only the proportionate management activity will be used. The will be improved to a crucial value at which the program outcome will display continual the vibrations. In this technique, if the program outcome does not display the continual the vibrations hence this technique does not implement.
[image:1.595.315.560.587.733.2]From the reaction below, the program under research is indeed oscillatory and hence the Z-N adjusting concept depending on crucial obtains and crucial interval can be used.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 11, November 2013)
[image:2.595.43.287.153.356.2]417
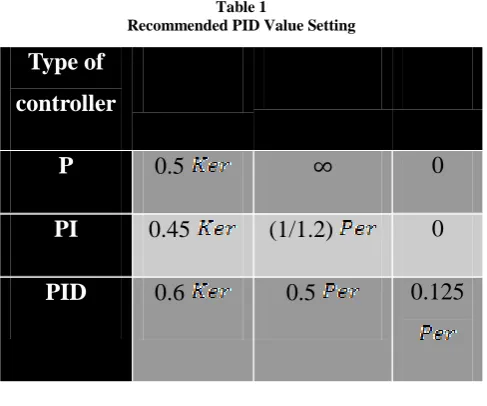
Table 1Recommended PID Value Setting
Type of
controller
P
0.5
∞
0
PI
0.45
(1/1.2)
0
PID
0.6
0.5
0.125
II. PROPOSED MODEL
A.Artificial Bee Colony (ABC) Algorithm
The ABC criteria is a swarm cantered, meta-heuristic method in accordance with the design first proposed by on the foraging behaviour of honey bee colonies. The design is composed of three important elements: applied and jobless foragers, and meals resources. The applied and jobless foragers are the first two components, while the third element is the wealthy meals resources close to their hive. The two leading modes of behaviour are also described by the design. These behaviours are necessary for self -organization and collective intelligence: recruitment of forager bees to wealthy meals resources, resulting in positive reviews and simultaneously, the abandonment of poor resources by foragers, which causes negative reviews. The ABC includes three groups of artificial bees: applied foragers, viewers and scouts. The applied bees comprise the first half of the colony whereas the second half includes the viewers. The applied bees link to particular meals resources. In other words, the variety of applied bees is equal to the variety of meals resources for the hive. The viewers observe the dancing of the applied bees within the hive, to decide on a meals resource, whereas scouts look for arbitrarily for new meals resources. Analogously in the marketing context, the variety of meals resources (that is the applied or viewer bees) in ABC criteria, is equivalent to the variety of solutions in the population. Moreover, the place of a meals resource signifies the place of a promising solution to the marketing problem, whereas the value of nectar of a meals resource represents the fitness cost (quality) of the associated solution.
The look for pattern of ABC includes three rules:
1.Sending the applied bees to a meals resource and
evaluating the nectar top quality.
2.Onlookers choosing the meals resources after
obtaining details from employing bees and calculating the nectar quality
3.Determining the look bees and delivering them on
to possible meals resources.
The roles of the meals resources are arbitrarily chosen by the bees at the initialization level and their nectar qualities are measured. The applied bees then share the nectar details of the resources with the bees waiting at the dancing area within the hive. After sharing these details, every applied bee returns to the meals resource visited during the previous pattern, since the place of the meals resource had been memorized and then selects another meals resource using its visible details in the neighbourhood of the present one. At the last level, an viewer uses the details obtained from the applied bees in the dancing area to decide on a meals resource. The probability for the meals resources to be chosen increases with an increase in its nectar top quality. Therefore, the applied bee with details of a meals resource with the highest nectar top quality recruits the viewers to that resource. It subsequently chooses other meals resource in the neighbourhood of the one currently in her memory depending on visible details (i.e. comparison of meals resource positions). A new meals resource is arbitrarily generated by a look bee to replace the one abandoned by the viewer bees. This look for process could be represented in ABC criteria as follows:
B.Pseudo code of the ABC Algorithm
1.Initialize the population of solutions
2.Evaluate the population
3.Cycle=1
4.Repeat
5.Produce new solutions (food source positions)
in the neighborhood of for the employed bees
and evaluate them.
6.Put on the greedy selection process between xi and
7.Compute the probability values Pi for the solutions
xi by means of their fitness values. In order to calculate the fitness values of solutions
(1)
Normalize values into [0, 1]
8.Produce the new solutions (new positions) for
the onlookers from the solutions , selected
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 11, November 2013)
418
9.Put on the greedy selection process for the
onlookers between and
10. Determine the abandoned solution (source), if
exists, and replace it with a new randomly produced solution xi for the scout using the equation
(2)
11. Memorize the best food source position
(solution) achieved so far
12. cycle=cycle+1
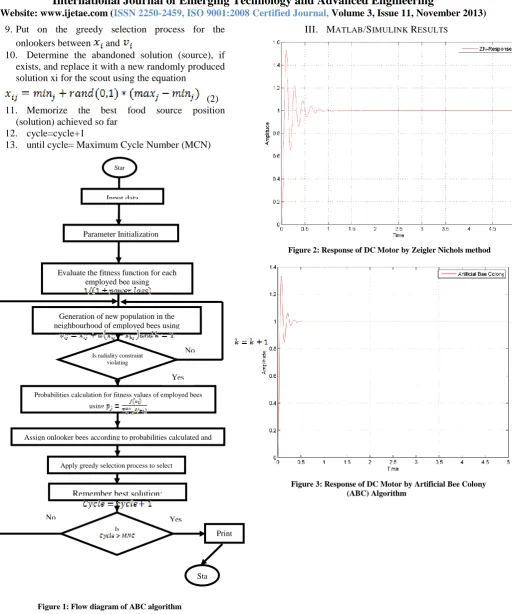
[image:3.595.54.567.111.726.2]13. until cycle= Maximum Cycle Number (MCN)
Figure 1: Flow diagram of ABC algorithm
III. MATLAB/SIMULINK RESULTS
Figure 2: Response of DC Motor by Zeigler Nichols method
Figure 3: Response of DC Motor by Artificial Bee Colony (ABC) Algorithm
Star t
Input data
Parameter Initialization
Evaluate the fitness function for each employed bee using
Generation of new population in the neighbourhood of employed bees using
Is radiality constraint violating
Assign onlooker bees according to probabilities calculated and evaluate the fitness values
Probabilities calculation for fitness values of employed bees using
Apply greedy selection process to select best solutions
Remember best solution:
Is
Print result No
Yes
Yes No
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 11, November 2013)
[image:4.595.51.291.117.336.2]419
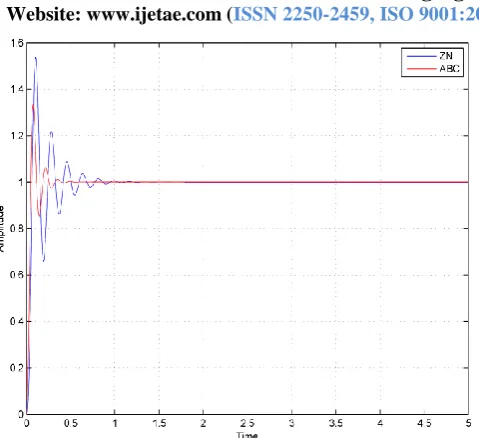
Figure 4: Comparison of DC Motor Response by Zeigler Nicholsmethod and Artificial Bee Colony (ABC) algorithm
IV. CONCLUSION
DC machine is considered to be basic electric devices. This dissertation has confirmed the execution of auto adjusting of PID operator in MATLAB. The aim of this dissertation is to present the strategy of acting of power elements and to use computer simulator as a device for performing temporary and management the DC engine. The result of dissertation is that the developed PID with Synthetic Bee Community (ABC) has much quicker reaction than the reaction of the traditional Ziegler Nichols strategy. The traditional strategy is good for giving us as the place to start of what are the PID principles. However the ABC developed PID with DC engine is much better with regards to the increase efforts and the deciding time than the traditional strategy. Lastly the Synthetic Bee Community criteria provides much better results as opposed to fliers and business cards. And also the mistake associated with the ABC cantered PID is much smaller than the mistake measured in the traditional plan. In this dissertation, execution of the Synthetic Bee Community criteria cantered PID operator for the DC engine position management system is protected.
REFERENCES
[1] Math Works, 2001, Introduction to MATLAB, the Math Works, Inc.
[2] J. J. D’Azzo and C. H. Houpis, “Linear control system analysis and design”, McGraw-Hill, New York, 1995.
[3] S. J. Chapman, Electric machinery fundamentals, 3rd ed., WCB/McGraw-Hill, New York, 1998.
[4] Astrom, K., T. Hagglund, “PID Controllers; Theory, Design and Tuning”, Instrument Society of America, Research Triangle Park, 2005.
[5] G. A. Gurzadyan, Space Dynamics, Taylor & Francis Inc, London, 2002.
[6] O. Dwyer, “PI And PID Controller Tuning Rules for Time Delay Process: A Summary. Part 1: PI Controller Tuning Rules”, Proceedings of Irish Signals and Systems Conference, June1999. [7] M. Chow and A. Menozzi, “On the comparison of emerging and
conventional techniques for DC motor control”, Proc. IECON, pp. 1008- 1013, 1992.
[8] S. Li and R. Challoo, “Restructuring electric machinery course with an integrative approach and computer- assisted teaching methodology”, IEEE Trans Educ. (49), 2006.
[9] P. C. Sen, “Electric Motor Drives and Control: Past, Present and Future”, IEEE Transaction on Industrial Electronics, Vol. IE37, No. 6, pp. 562-575, 1990.
[10] S. Skogestad, “Probably The Best Simple PID Tuning Rules In The World” Journal Of Process Control, September 2000. [11] Ang K., Chong G., Li Y., “PID control system analysis, design,
and technology”, IEEE Trans. Control System Technology, vol. 13, p. 559 – 576, Jul. 2005.
[12] Anguluri Rajasekhar, Ajith Abraham, Pratap Kunathi, Millie Pant, “Fractinal Order Speed Control of DC Motor Using Levy Mutated Artificial Bee Colony Algorithm”, IEEE, World Congress on Information and Communication Technologies (WICT), pp. 7-13, December 2011.
[13] Mohammed E. El-Telbany, “Tuning PID Controller for DC Motor: An Artificial Bees Optimization Approach”, International Journal of Computer Applications, ISSN: 0975 – 8887, Volume 77– No.15, September 2013.
[14] Akhilesh Kumar Mishra, Vineet Kumar Tiwari, Rohit Kumar, Tushar Verma, “Speed Control of DC Motor Using Artificial Bee Colony Optimization Technique”, Universal Journal of Electrical and Electronic Engineering, pp. 68-75, October 2013.
[15] V. Tereshko and A. Loengarov. “Collective decision making in honey-bee foraging dynamics”, Computing and Information Systems, 9(3):1, 2005.
[16] D. Karaboga and B. Akay. “Artificial bee colony algorithm on training artificial neural networks”, In Signal Processing and Communications Applications, 2007. SIU 2007. IEEE 15th, pages 1–4. IEEE, 2007.
[17] Capolino G.A., Cirrincione G., Cirrincione M., Henao H., Grisel R., “Digital Signal Processing for Electrical Machines”, Invited paper, Proceedings of ACEMP'01 (Aegan International Conference on Electrical Machines and Power Electronics), Kusadasi, Turkey, June 2001, p. 211 – 219.
[18] B.C. Kuo "Automatic Control Sytems" (sixth edition), Prentice Hall, 1991.
[19] K Ogata, “Modern Control Systems”, University of Minnesota, Prentice Hall, 1987.
[20] Lancet Mit “Introduction to D.C. Motors” User conference, Austin texas Vol 11 2004.
[21] Matt Krass, PID Control Theory, Matt Krass 2nd Edition 2006. [22] Saffet Ayasun “DC Motor Speed Control Methods Using
MATLAB/Simulink” Department of Electrical and Electronics Engineering, Nigde University, Nigde 51100, Turkey 2006. [23] S. J. Chapman, “Electric machinery fundamentals”, 3rd edition,
WCB/McGraw-Hill, New York, 1999.
[24] Kamaraj “Tuning Algorithms for PID Controller Using Soft Computing Techniques” 2001.
[25] Aigner, P., Pythian, M., Wen, P. and Black, J, “Computer Controlled System”, Distance Education Centre, USQ, 2003. [26] P.E. Wellstead and M.B Zarrop “Self Tuning Systems, Control
and Signal Processing”, (Publishers (WILEY)), pp. 140-150, 1991.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 11, November 2013)
420
[28] A. Carriere, J. Perriere: “A Two-Step automatic Tuning Procedure for PID controllers” IEEE Conference on control applications, Sep-13-16, 1993.
[29] Qing-Guo Wang,Tong-Heng Lee: “PID Tuning for Improved Performance” IEEE Transactions On Control Systems Technology, VOL-7, NO.4 JULY 1999, pp:457-465.
BIODATA
Author: Prakash Varma received
his BE (Electronics &
Telecommunication) degree
from Pandit Ravi Shankar
Shukla University Raipur in 2008. He is currently an M.E.
student in the Electrical
Engineering specialization in
power electronics from Chhattisgarh Swami
Vivekananda Technical University Bhilai. He is Research interests are in the of power electronics, power quality and power system.
Co-Author: B. Anjanee Kumar received his M.Tech in
Electronics & Telecommunication Engineering
Specialization in Embedded Systems from NIST, BPUT in 2008. He completed his BE in KIIT University in 2006. He is Assistant Professor in Raipur Institute of
Technology, Raipur, and Chhattisgarh Swami