2017 2nd International Conference on Computer Science and Technology (CST 2017) ISBN: 978-1-60595-461-5
Novel Reverse Driving based Fruit Fly Optimization
Algorithm for Parameter Optimization
You-wei WANG
1,a*and Li-zhou FENG
21 School of information, Central University of Finance and Economics, Beijing, China
2 School of science and engineering, Tianjin University of Finance and Economics, Tianjin, China
*Corresponding author
Keywords: Parameter optimization, Fruit fly optimization algorithm, Bacterial chemotaxis, Convergence accuracy.
Abstract. Traditional swarm intelligence based parameter optimization algorithms always have the problems of high computational complexity, strong parameter dependence and poor global searching ability. On this basis, a reverse driving based fruit fly optimization algorithm is proposed. The concept of worst group is proposed and the single "attractant" based attraction operation is used to update the positions of the fruit flies. Moreover, a worst group based reverse driving operation is proposed to solve the problem of local optimum. Experimental results on four standard functions show that, the convergence accuracy of the proposed method is improved when compared to traditional swarm intelligence based optimization algorithms.
Introduction
Pan proposed the fruit fly optimization algorithm (FOA), which obtains the global optimal parameter by simulating the foraging behavior of fruit flies [1, 2]. Compared to the traditional swarm based parameter optimization algorithms (such as particle swarm algorithm [3], artificial bee colony algorithm [4], etc), FOA has the advantages of lower computational complexity and weaker parameter dependency, thus has been widely used in parameter optimization field.
Traditional Fruit Fly Optimization Algorithm
Inspired by the fact that the fruit flies search for the best position of the food sources by the keen senses of smell and vision, PAN proposed the fruit fly optimization algorithm [1, 2], which is described as follows:
The Proposed Algorithm
Han and Liu introduced the operations of bacterial attraction (approaching the attractant) and bacterial exclusion (escaping the repellent) into FOA. However, this algorithm only focuses on the repellent of the current worst fruit fly, ignoring the comprehensive exclusion of the individuals of which the performances are very poor. On this basis, we introduce the conception of worst group, which consists of the top n
worst fruit flies in each iteration and denoted as GW={xgw1, xgw2,…, xgwn}. Taking the
minimum optimization problem as an example, the details of the proposed algorithm are given as follows.
Input: X: fruit fly population which has N individuals; xmin: minimum value of the food position;
xmax: maximum value of the food position; T: maximum number of the iterations; D: dimension number of the food position vector; rmax: maximum value of the searching radius; rmin: minimum value of the searching radius; L: iteration number threshold.
Output: the global best food source position Xb. 1. fori←1:1:N
2. generate the fruit fly Xi’s position randomly by using the following formula:
(
)
min max min Rand() 0
ij
x ←x + x −x × , ≤ <j D (4)
where xij is the jth dimension of Xi.
3. end for
4. fori←1:1:N
5. calculate Xi’s fitness value Fit(Xi);
6. end for
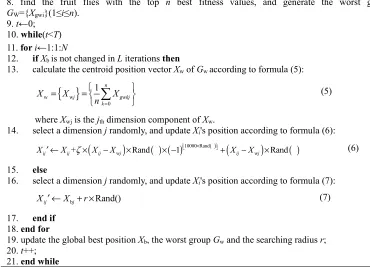
8. find the fruit flies with the top n best fitness values, and generate the worst group
GW={Xgwi}(1≤i≤n). 9. t←0;
10. while(t<T) 11. for i←1:1:N
12. ifXb is not changed in L iterations then
13. calculate the centroid position vector Xw of Gw according to formula (5):
{ }
w w gw
0
1 n
j kj
k
X X X
n =
= =
(5) where Xwj is the jth dimension component of Xw.14. select a dimension j randomly, and update Xi's position according to formula (6):
(
)
( ) ( )1000 Ra ( )(
)
( )w w
0 nd
Rand Rand
+ 1
ij ij ij j ij j
X ′ ←X ζ× X −X × × − × + X −X × (6)
15. else
16. select a dimension j randomly, and update Xi's position according to formula (7):
bj Rand )( ij
X ′ ←X + ×r (7)
17. end if
18. end for
19. update the global best position Xb, the worst group Gw and the searching radius r; 20. t++;
21. end while
where L is a threshold; ξ is the reverse driving factor, the smaller the ξ, the greater the reverse driving force of the worst group. The parameter r is the dynamic searching radius in IFFO algorithm [7]. In this paper, L and ξ are empirically set to L = 100 and
ξ= 1/2.
Experimental Results and Analysis
We compare the proposed algorithm with six algorithms: FOA [1, 2], BWFOA [5], BCFOA [6] and IFFO [7] in the following experiments. Moreover, the fruit fly numbers of all algorithms are set to N=50. As is shown in Table 1, two typical unimodal functions (F1-F2) [5, 8] and two typical multimodal functions (F3-F4) [7]are
[image:3.612.109.479.72.339.2]used for validating the performances of different algorithms. To ensure the convergences of the algorithms, the maximum number of the iterations T is set to T= 3000.
Table 1. formulas, target optimal (minimum) values and the best food source position of different functions.
functions formulas (minimum) values target optimal best food source position
F1 ( )
1 1
D i i f x x
=
= + 0 (-1, -1,…,-1)
F2 ( )
(
( ) ( ))
2 2
2
1
100 1
D
i i i i
f x x x x
=
= − + − 0 (1, 1, …, 1)
F3 ( )
(
2 ( ))
1
10 cos 2 10
D
i i
i
f x x πx
=
= − + 0 (0, 0, …, 0)
F4 ( )
(
(
)
)
2 2 2
1 1 2 2 2 1 1 sin 0.5 0.5 1 0.001 D i i i i i x x f x x x − + = + + − = + + +
0 (0, 0, …, 0)
average global best values of each algorithm are calculated and shown in Table 2. From Table 2 we know that, when dealing with the unimodal function F1, the results
[image:4.612.115.495.217.311.2]of the proposed method and IFFO are generally higher than those of other methods. The reason may be that the later methods use the smell concentration judgment value as the criterion for selecting the optimal global fruit fly directly, thus cannot achieve the optimization of negative parameters. Moreover, this paper obtains the lowest average global best fitness value for all functions, illustrating that the worst group reverse driving based fruit fly position updating strategy is efficient in avoiding the local optimum and improving the global searching ability.
Table 2. Convergence accuracy comparisons of different algorithms.
algorithms F1 F2 F3 F4
FOA 5 2.125 3.26e-1 6.64e-1
IFFO 5.34e-2 1.280 1.27e-1 2.21e-2 BWFOA 2.059 24.365 6.07e-1 7.12e-1 BCFOA 1.006 17.536 2.36e-2 9.75e-2 The proposed method 1.32e-3 5.15e-4 3.58e-4 6.69e-3
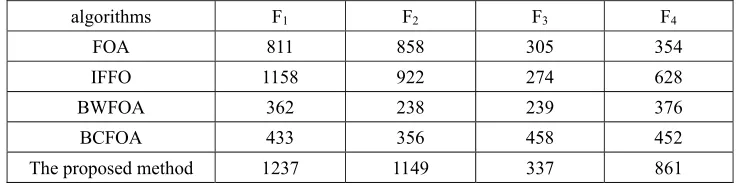
Set the dimension of each test function to 2, 4, 6, 8 and 10, respectively. For each algorithm, 100 times experiments are carried out on each function, and the average converged iteration number of each algorithm is calculated and shown in Table 3. Obviously, though FOA, IFFO and BWFOA converge fast, these methods do not execute global searching process at the later iteration stage thus fall into the local optimum easily. When dealing with the multipolar functions, the corresponding results of this paper are significantly higher than those of the BCFOA algorithm. The reason is that though BCFOA executes reverse driving operation when the population converges, it cannot jump out of local optimum as the global worst position overlaps the current positions of the fruit flies.
Table 3. Converge speed comparisons of different methods.
algorithms F1 F2 F3 F4
FOA 811 858 305 354
IFFO 1158 922 274 628
BWFOA 362 238 239 376
BCFOA 433 356 458 452
The proposed method 1237 1149 337 861
Conclusions
[image:4.612.121.490.484.577.2]Acknowledgements
This research is supported by Project supported by the Beijing Natural Science Foundation, under grant no. 4174105 and the Discipline Generation Foundation of the Central University of Finance and Economics, under grant no. 2016XX02.
References
[1] W. C. Pan. Using fruit fly optimization algorithm optimized general regression neural network to construct the operating performance of enterprises model [J]. Journal of Taiyuan University of Technology (Social Sciences Edition), 29(4): 1-5. (2011)
[2] W. T. Pan. A new fruit fly optimization algorithm: taking the financial distress model as an example [J], Knowledge-Based Systems, 26: 69-74. (2012)
[3] C. H. Jiang, Y. H. Zhang, S. H. Wang. PID parameter optimization of the grate cooling electro-hydraulic position servo system based on adaptive particle swarm optimization algorithm [J]. Chinese Hydraulics & Pneumatics, (7):44-49. (2016) [4] D. Karaboga, B. Akay. A comparative study of artificial bee colony algorithm [J]. Applied Mathematics and Computation, 214(1): 108-132. (2009)
[5] J. Y. Han, C. Z. Liu. Efficient fruit fly optimization algorithm with reverse cognition [J]. Computer Engineering, (11):223-225. (2013)
[6] J. Y. Han, C. Z. Liu. Fruit fly optimization algorithm based on bacterial chemotaxis [J]. Journal of Computer Applications, 33(4):964-966. (2013)
[7] Q. K. Pan, H. Y. Sang, J. H. Duan, et al. An improved fruit fly optimization algorithm for continuous function optimization problems [J]. Knowledge-Based Systems, 62: 69-83. (2014)