2016 International Conference on Electronic Information Technology and Intellectualization (ICEITI 2016) ISBN: 978-1-60595-364-9
Study on Anti-collision Algorithm
in Underground Mine Personnel
Positioning System
Ming Zhang
ABSTRACT
In order to avoid signal collision occurs when more than one electronic tag send the recognition information to the reader in underground mine personnel positioning system, an improved binary searching algorithm is proposed in this paper. The improved algorithm can reduce redundant information and searching times by using dynamic and variable querying instruction length and regressive strategy. The simulation results show that this algorithm is superior to other algorithms in searching times, searching time and throughput. It can effectively solve the anti-collision problem of multi-object identification.
INTRODUCTION
The underground mine personnel positioning system based on RFID is used to judge the location of workers underground mine. When more than one worker bring electronic tags enter the effective area of the reader at the same time, the signals will interfere with each other so that the correct information cannot read by the reader. When the mine accident occurs, the electronic tags brought by workers will be easy to collide. Thus, the rescue work may be delayed because the location of disaster victims cannot be got in time and accurately. Therefore, it is very important to realize the automatic recognition of electronic tags quickly and efficiently [1-3]. ________________________
The technique of TDMA is applied to the algorithms of anti-collision, including the ALOHA one based on time slot and binary searching algorithm. The algorithm of ALOHA is easy to realize, but some tag cannot be read within the specified recognition time, being starved, because the tags are brought in randomly. The searching algorithm based on binary is more complex so that the tags within the range of the reader can be recognized successfully [4-5]. Because the information of workers is required to get promptly in position system, an improved binary searching algorithm is prosed in this paper. The performance of underground mine personnel position system can be improved by using dynamic and variable instruction length, regressive strategy and double collision bits querying.
THE ANTI-COLLISION ALGORITHM BASED ON BINARY SEARCHING
The Manchester code is used as the communication code between the reader and electronic tags in positioning system, where “1” is the hop from high level to low level, “0” being the hop from low to high. When more than one tag send the information to the reader, the rising edge offset by the falling one. A non- Manchester code which cannot be recognized occurs, being collision bit [6-7].
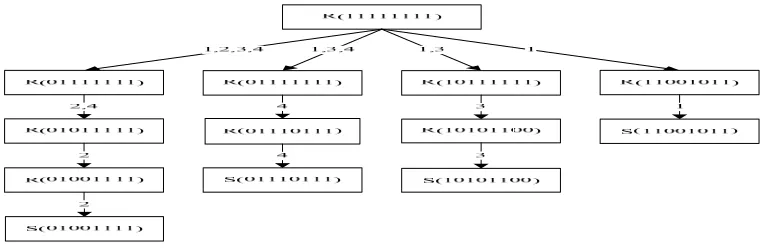
By using binary searching (BS) algorithm, all electronic tags would be recognized in order of their sequence numbers. The procedure is as follows [8-10]:
1) When the tags enter the effective work area of the reader, a “Request” instruction which brings all “1” sequence will be emitted by the reader. Then, all the electronic tags will respond and send their own sequence numbers to the reader.
2) The collision occurs inevitably when more than one electronic tag responded and sent sequence numbers at the same time. The highest collision bit will be set “0”. If the bit is higher than collision bit, the value will be unchanged, otherwise being set “1”.
3) The new sequence number acquired from Procedure 2 will be sent to the tag from the reader. Then, it will be compared with the sequence number of the tag. When its own sequence number is less than or equal to the new one, the tag will send its sequence number back to the reader.
4) Repeat Procedure 2 and 3 until the electronic tag which has the minimum number can be selected. This tag would send its sequence number to the reader again, while the minimum sequence number is received by the reader. A “Sleep” instruction will be sent, which can make the electronic tag of minimum sequence number sleep.
5) Repeat the procedures above, all the electronic tags will be recognized in order of the sequence number by the reader.
number. The digital identification corresponding to the tag is given in the process of recognition, where R is “Request” and S represents “Sleep”.
Figure 1. Example of binary searching algorithm.
THE IMPROVED ALGORITHM
Although the traffic of DBS is half of that of BS, redundant information reduced, there is improved space about it. The searching times is reduced by the algorithm of RBS, but the returned sequence number is still whole.
According to the binary searching algorithm the collision tags will be divided to two subsets which are Subset “0” and Subset “1”. Firstly, Subset “0” is queried. When no collision occurs, the tag can be recognized successfully by the reader. If there is still collision existing Subset “0” will be divided to two subsets (Subset “01” and Subset “00”) furtherly. By analogy, the process will end until all tags will be recognized in Subset “0”. The procedure of the improved algorithm is as follows:
1) The sequence number “SN” is initialized to the maximum value.
2) The reader sends the instruction “Request” which brings a Parameter “SN” with its length beingX . When the instruction is received by the tag, the higher X bits of its sequence number are compared with the Parameter “SN” of the instruction “Request”. If they are less than or equal to the received Parameter “SN”, the remaining bits of this tag will be sent to the reader.
3) The highest collision bit and the second highest one are detected by the reader. If collision occurs, the highest collision bit and the second highest one will be set to 00, 01, 10 and 11 respectively. Then the Procedure 2 is carried on in turn. On the other hand, if no collision occurs the tag will be recognized by the reader successfully, turning to Procedure 4.
4) The reader sends instruction “Sleep” to the recognized tag to make it sleep. Then the regressive strategy is applied to get the next “Request” parameter from the collision node on the previous layer.
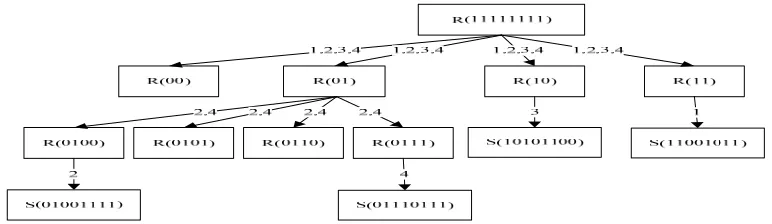
algorithm is shown in Figure 2. Two collision bits query and dynamic instruction length are used. After recognizing a tag the query continues from the father node not from the root node. Then the tags (T2, T4, T3 and T1) can be recognized one by one.
[image:4.612.104.490.167.279.2]
Figure 2. The example of improved algorithm.
SIMULATION AND ANALYSIS OF THE ALGORITHMS
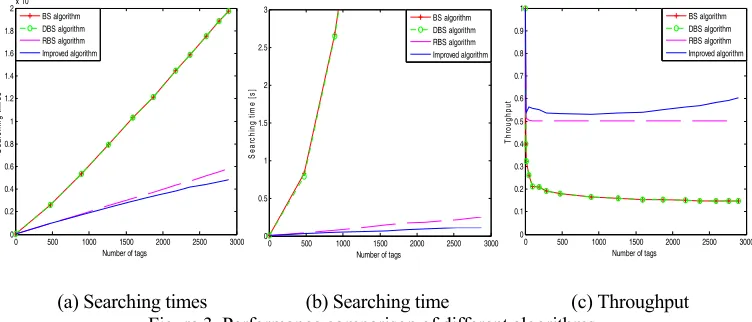
In order to verify the performance of the improved algorithm, the algorithm including the improved one, BS, DBS and RBS are simulated by using Mat lab. In the process of simulation 12-bit binary is used to represent the sequence number of the tag. Because the tag is produced randomly and it is unique, the maximum number of 12-bit binary tag is less than 4096.
While the sequence number of the tag is 12-bit binary, the performance comparison of different algorithms is shown in Figure 3. As in Figure 3(a), the searching times of different algorithms increases with the number of the tags. the searching times of the improved algorithm is the smallest, being more suitable for the situation where more tags exit. As in Figure 3(b), obviously the searching time of BS and DBS are longer than that of RBS and the improved algorithm, the improved algorithm is the shortest. As in Figure 3(c), the throughput of BS is the same as that of DSB, being less than 20%. The throughput of RBS is about 50%, whereas that of the improved algorithm is close to 60%. Obviously, the throughput of the improved algorithm is higher than those of other algorithms.
CONLUSION
and accurately. The improved algorithm has the features such as simplicity and low complexity, being suitable for the underground mine personnel positioning system based on RFID. Therefore, it will have broader application prospects.
[image:5.612.110.486.161.322.2](a) Searching times (b) Searching time (c) Throughput Figure 3. Performance comparison of different algorithms.
ACKNOWLEDGMENT
This work is sponsored by the Natural Science Foundation of Shaanxi Province (2015JM6341), the Scientific Research Program Funded by Shaanxi Provincial Education Department (15JK1463) and the Scientific Research Foundation of Xi'an University of Science and Technology (2014074).
REFERENCES
1. Yanchang Liu, Jia Zhang and Zhiguang Wang. Jun 2011. “Research of anti-collision algorithm in underground mine personnel tracking and positioning system based on RFID technology” (In Chinese). Techniques of Automation & Applications, vol. 30, pp. 51–54. 2. Y.L. Sun, X.B. Wu and Y.W. Chen. Apr 2014. “Improved quad-tree RFID anti-collision
algorithm” (In Chinese). Computer Engineering and Applications, vol. 50, pp. 63–68. 3. Gensuo Mi, Yankuai Wang and Xuexia Ma. Dec 2012. “Research on RFID
anti-collisionalgorithm in tunnel personnel positioning system” (In Chinese). Computer Engineering and Applications, vol. 48, pp. 72–76.
4. J.H. Choi, D.W. Lee and H.J. Lee. Dec 2006. “Bi-slotted tree based anti-collision protocols for fast tag identification in RFID systems,” IEEE Communications Letter, vol. 10, pp. 861– 863.
5. V. Namboodiri and L.X. Gao. Jan 2007. “Energy-aware tag anti-collision protocols for RFID systems,” IEEE Transactions on Mobile Computing, vol. 9, pp. 44–59.
6. Jun Su, Zhong Wang and Heheng Chen. Feb 2015. “Anti-collision algorithm in RFID based on improved dynamic binary algorithm” (In Chinese). Measurement & Control Technology, vol. 34, pp. 111–114.
0 500 1000 1500 2000 2500 3000 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2x 10
4
Number of tags
S ear chi ng t im es BS algorithm DBS algorithm RBS algorithm Improved algorithm
0 500 1000 1500 2000 2500 3000 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Number of tags
T hr ough pu t BS algorithm DBS algorithm RBS algorithm Improved algorithm
0 500 1000 1500 2000 2500 3000 0 0.5 1 1.5 2 2.5 3
Number of tags
7. Hongmei Zhou, Hailong Rong and Zhenghua Ma. Apr 2013. “An improved binary anti-collision algorithm” (In Chinese). Journal of Changzhou University (Natural Science Edition), vol. 25, pp. 48–51.
8. Yujun Lu and Yuan Wu. May 2015. “Research on anti-collision algorithm of RFID based on binaries” (In Chinese). Industrial Control Computer, vol. 28, pp. 62–64.
9. Xue Wang, Zhihong Qian and Xiaohui Liu. Jul 2015. “Improved tree structure anti-collision algorithm of RFID” (In Chinese). Journal on Communications, vol. 36, pp. 129–137.