R E S E A R C H
Open Access
Analysis of Abel-type nonlinear integral
equations with weakly singular kernels
JinRong Wang
1,2, Chun Zhu
2and Michal Feˇckan
3,4*Dedicated to Professor Ivan Kiguradze
*Correspondence:
[email protected] 3Department of Mathematical Analysis and Numerical
Mathematics, Comenius University, Mlynská dolina, Bratislava, 842 48, Slovakia
4Mathematical Institute, Slovak Academy of Sciences,
Štefánikova 49, Bratislava, 814 73, Slovakia
Full list of author information is available at the end of the article
Abstract
In this paper, we investigate Abel-type nonlinear integral equations with weakly singular kernels. Existence and uniqueness of nontrivial solution are presented in an order interval of a cone by using fixed point methods. As a byproduct of our method, we improve a gap in the proof of Theorem 5 in Buckwar (Nonlinear Anal. TMA 63:88-96, 2005). As an extension, solutions in closed form of some Erdélyi-Kober-type fractional integral equations are given. Finally theoretical results with three illustrative examples are presented.
MSC: Primary 26A33; secondary 45E10; 45G05
Keywords: Abel-type nonlinear integral equations; weakly singular kernels; existence; numerical solutions
1 Introduction
Abel-type integral equations are associated with a wide range of physical problems such as heat transfer [], nonlinear diffusion [], propagation of nonlinear waves [], and they can also be applied in the theory of neutron transport and in traffic theory. In the past years, many researchers investigated the existence and uniqueness of nontrivial solutions for a large number of Abel-type integral equations by using various analysis methods (see [–] and references therein).
Fractional calculus provides a powerful tool for the description of hereditary proper-ties of various materials and memory processes. In particular, integral equations involv-ing fractional integral operators (which can be regarded as an extension of Abel integral equations) appear naturally in the fields of biophysics, viscoelasticity, electrical circuits, and etc. There are some remarkable monographs that provide the main theoretical tools for the qualitative analysis of fractional order differential equations, and at the same time, show the interconnection as well as the contrast between integer order differential models and fractional order differential models [–].
It is remarkable that many researchers pay attention to the study of the existence and attractiveness of solutions for fractional integral equations by using functional analy-sis methods such as the contraction principle, the Schauder fixed point theorem and a Darboux-type fixed point theorem involving a measure of noncompactness (see [–] and references therein).
A completely different approach is given in Buckwar [] to discussing the existence and uniqueness of nontrivial solutions for Abel-type nonlinear integral equation with
law nonlinearity on an order interval as follows:
xp(t) = (α)
t
K(t,s) (t–s)–α
x(s)ds, t∈[,T]. ()
Many analysis techniques are used to construct the suitable order interval (see Lemma , []) and the spaces with suitable weighted norms.
Motivated by [, , , ], we extend to study the following Abel-type nonlinear inte-gral equation with weakly singular kernels:
hx(t)=β
–α (α)
t
K(t,s)sγ–
(tβ–sβ)–α
gx(s)ds, t∈[,T], ()
whereh,g∈C([,M), [, +∞)) are given functions for someM∈(, +∞],his increasing, gis nondecreasing such that
a–xp–≤h(x)≤a+xp+, b–xq–≤g(x)≤b+xq+, ≤x<M, ()
for some positive constantsa±,b±,p±,q±, <α< ,γ ≥β> , and <q+≤q–<p+≤
p–, the functionK(t,s) is non-negative and it has either the formK(t,s) =k(tβ–sβ) or
K(t,s) =k(t,s) for some functionk,kspecified later. (·) is the Gamma function. Of
course, we suppose
a–Mp––p+≤a+, b–Mq––q+≤b+. ()
It is obvious that equation () or
xp(t) = β
–α (α)
t
K(t,s)sγ–
(tβ–sβ)–α
xq(s)ds, t∈[,T], ()
are special cases of equation (), which of course all have trivial solutions.
Thus, the main purpose of this paper is to prove the existence and uniqueness of non-trivial solutions for equation (). The key difficult comes from the weakly singular kernels (tβ–sβ)–α and nonlinear terms in equation (). Although we are motivated by [], we have to introduce novel techniques and results to overcome the difficult from the weakly singular kernels and nonlinear termshandg. For example, the first important step is how to construct a suitable order interval to help us to apply the fixed point theorem in such an order interval. More details of the novel techniques and results will be found in the proof. As a byproduct of our method, we improve a gap in the proof of [, Theorem ]. So even for equation () (or ()) we get a new result.
As an extension, we find general solutions in closed form of some Erdélyi-Kober-type fractional integral equations (the special case of equation () ifb= ):
ϕm(x) =axβ(mN–N)EKIα
+;σ,ηϕN
(x) +bxβNm, x> , ()
whereα,b,σ≥,N= , andη∈Rand the symbolEKI+;α σ,ηϕNdenotes the Erdélyi-Kober-type fractional integrals [] of the functionϕN, which is given by
EKI α
+;σ,ηϕN
(x) :=σx
–σ(α+η)
(α)
x
tσ η+σ–ϕN(t)dt
The plan of this paper is as follows. In Section , some notation and preparation results are given. Existence and uniqueness results of a nontrivial solution of equation () in an order interval are given in Section . In Section , we find general solutions in closed form of some Erdélyi-Kober-type fractional integral equations, and finally theoretical results with three illustrate examples are presented in Section .
2 Preliminary
Let M be the set M := {f ∈ C[,T] : f() = } with the supremum-norm fM :=
sup<t≤T{|f(t)|}. Clearly, the set (M, · M) is a closed subspace of Banach space (C[,T],
· C). Thus, (M, · M) is a Banach space.
Letqbe a continuous function on [,T] withq(t) > for allt> and letMqbe the set
Mq:=
f ∈M: sup
<t≤T
|f(t)| q(t) <∞
with the weighted norm
fq:= sup
<t≤T
|f(t)|
q(t)
. ()
Remark . Ifq() > , then the setMqis the same as the setM, but with an equivalent norm, and the constants can be determined in the following inequality:
cu–vg≤ u–vM≤cu–vg,
wherec=maxt∈[,T]{g(t)}andc=mint∈[,T]{g(t)}. Note that the similar inequality () of
[] is incorrect.
Consider the cone PM:={u∈M:u(t)≥,t∈[,T]} inM. The so-called partial
or-dering induced by the conePM is given byu≤v⇐⇒u(t)≤v(t) for allu,v∈Mand all
t∈[,T]. In general [, ], a set [f,g] ={h∈E:f ≤h≤g}is called an order interval whereEis an ordered Banach space. We know that every order interval [f,g] is closed. Moreover, iffE≤ gEfor allf,g∈Ewith ≤f ≤g, then every order interval [f,g] is bounded.
We introduce some conditions on the functionsK,ki,i= , as follows: (i) k∈C(n)[,T]wheren∈ {, , , . . .}, and=k∈C[,T].
(ii) k(t) > for allt∈(,T]andk(t,s)≥for all≤s≤t≤T.
(iii) k() =k()() =· · ·=k (n–)
() = , andk (n) (t)≥k
(n)
() > , for allt∈(,T].
• ForK(t,s) =k(tβ–sβ)andn≥, we set
Klow=k(n)(), Kup= max
t∈[,T] k (n) (t)
. ()
• ForK(t,s) =k(t,s), we setn= and
Klow=Kmin:= min
≤s≤t≤T k(t,s)
, Kup=Kmax:= max
≤s≤t≤T k(t,s)
. ()
We note [] an important estimate on the functionK, which will be used in the sequel.
Lemma . The function K(·,·)has the following estimate:
n!
tβ–sβnKlow≤K(t,s)≤
n!
tβ–sβnKup, ≤s≤t≤T. ()
Proof We only check the case ofK(t,s) =k(tβ–sβ) withn≥, since the other cases are
trivial.
Integratingntimes step-by-step all sides of the inequality
k(n)()≤k(n)(t)≤Kup
from totand usingk() =k()() =· · ·=k (n–)
() = we immediately derive
tn n!k
(n)
()≤k(t)≤
tn n!Kup.
Replacingtby (tβ–sβ), we obtain the desired result.
To end this section, we collect the following basic facts, which will be used several times in the next section.
Lemma . Letλ,γ,μ,andν be constants such thatλ> ,Re(γ) > ,Re(μ) > ,and
Re(ν) > .Then
t
tλ–sλν–sμ–ds=t λ(ν–)+μ
λ B
μ λ,ν
, t∈[, +∞),
and
t
a
tλ–sλν–sγ–sλ–aλμds
≥(tλ–aλ)ν+ γ λ+μ–
λ B
γ λ +μ,ν
, t∈[a, +∞),a≥,
where
B(ξ,η) =
sξ–( –s)η–ds Re(ξ) > ,Re(η) >
is the well-known Beta function.
Proof The first result have been reported in [] or [, Formula .]. We only verify the second inequality. In fact, for anyt∈[a, +∞),a≥, we derive
t
a
tλ–sλν–sγ–sλ–aλμds
= λ
tλ
aλ
= λ
tλ
aλ
tλ–uν–uλγ–u–aλμdu
= λ
tλ–aλ
tλ–aλ–zν–aλ+z
γ λ–zμ
du setu=aλ+z
≥
λ
tλ–aλ
tλ–aλ–zν–zγλ+μ–du
=(t
λ–aλ)ν+γλ+μ–
λ B
γ λ+μ,ν
.
The proof is completed.
3 Existence and uniqueness of nontrivial solution in an order interval
In this section, we will use the fixed point method to prove the existence and uniqueness of nontrivial solution for equation () in an order interval.
For allt∈[,T], we introduce the following functions:
F(t) =Atτ–, G(t) =Btτ+,
A=
b–β–αKlow
a+(α)n! B
β(n+α– )q–+γp+
β(p+–q–)
,n+α
p+–q–
,
B=
b+β–αKup
a–(α)n!
B
β(n+α– )q++γp–
β(p––q+)
,n+α
p––q+
,
τ–=
β(n+α– ) +γ p+–q–
, τ+=
β(n+α– ) +γ p––q+
,
whereKlowandKupare defined in equation () or ().
Remark . Note thatβ(n+α– )q∓+γp±≥β(α– )q∓+βp±=β(p±–q∓) +αβq∓> andβ(n+α– ) +γ ≥β(α– ) +β=αβ> . Next,τ–≥τ+.
The following result is clear.
Lemma . If
ATτ––τ+≤B<MT–τ+ ()
then F(t)≤G(t) <M for all t∈[,T].Consequently,the order interval[F,G]⊂PMis well
defined.
Remark . Ifp+=p–,q+=q–, andM= +∞then equation () reads
a+b+
a–b– ≥
Klow
Kup
which is satisfied, since equation () impliesa+≥a–> ,b+≥b–> (see equation ())
From now on, we suppose that all above assumptions hold: equations (), (), (i)-(iii), and ().
Lemma . Any solution x∈PMof equation(),with M>x(t) > for all t∈(,T],
satis-fies x∈[F,G].
Proof Step : We prove thatx≤Gfor a solutionxof equation (). Setx+(t) =maxs∈[,t]x(s) =x(st). Then we obtain
a–xp–(t)≤h
x(t) = β –α (α) t
K(t,s)sγ–
(tβ–sβ)–αg
x(s)ds
≤b+xq++(t)
β–α (α)
st
K(st,s)sγ– (sβt –sβ)–α
ds
≤b+xq++(t)
β–αKup
(α)n!
st
sβt –sβ
n+α–
sγ–ds
=b+xq++(t)
β–αKup
(α)n!B
γ β,n+α
sβt(n+α–)+γ
≤b+xq++(t)
β–αK
up
(α)n!B
γ β,n+α
tβ(n+α–)+γ,
which implies that
x(t)≤x+(t)≤
b+β–αKup
a–(α)n!B
γ β,n+α
p––q+
tβ
(n+α–)+γ
p––q+ . ()
Next we set
:= sup
t∈(,T]
x(t) tτ+ ≤
b+β–αKup
a–(α)n!
B
γ β,n+α
p––q+
.
Then we have
a–xp–(t)≤h
x(t) = β –α (α) t
K(t,s)sγ–
(tβ–sβ)–αg
x(s)ds
≤b+q+
β–αKup
(α)n!
t
tβ–sβn+α–sγ–sq+τ+ds
=b+q+
β–αKup
(α)n!B
γ +q+τ+
β ,n+α
tβ(n+α–)+γ+q+τ+ ≤b+q+
β–αK
up
(α)n!B
β(n+α– )q++γp–
β(p––q+)
,n+α
tp–τ+,
and so
x(t) tτ+ ≤
q+
p–
b+β–αKup
a–(α)n!B
β(n+α– )q++γp–
β(p––q+)
,n+α
p–
hence
≤
q+
p–
b+β–αKup
a–(α)n!B
β(n+α– )q++γp–
β(p––q+)
,n+α
p– , thus ≤
b+β–αKup
a–(α)n!B
β(n+α– )q++γp–
β(p––q+)
,n+α
p––q+
,
consequently
x(t)≤
b+β–αKup
a–(α)n!
B
β(n+α– )q++γp–
β(p––q+)
,n+α
p––q+
tτ+=G(t). ()
Since β(n+α–)q++γp–
β(p––q+) >
γ
β impliesB(
β(n+α–)q++γp–
β(p––q+) ,n+α) <B(
γ
β,n+α), estimate () is an improvement of equation ().
Step : We prove thatx≥F. Fixa∈(,T) and set
ϒa:= inf t∈(a,T]
x(t) (tβ–aβ) >
for:=ββ(n(+pα+–)+–q–)γ > . Then like above, fort∈(a,T], we get a+xp+(t)≥h
x(t) = β –α (α) t
K(t,s)sγ–
(tβ–sβ)–αg
x(s)ds
≥b–ϒaq– β–α (α)
t
a
K(t,s)sγ–
(tβ–sβ)–α
sβ–aβq– ds
≥b–ϒaq– β–αK
low
(α)n!
t
a
tβ–sβn+α–sγ–sβ–aβq–ds
≥b–ϒaq– β–αK
low
(α)n! B
γ
β +q–,n+α
tβ–aβn+α–+
γ β+q–
=b–ϒaq– β–αK
low
(α)n! B
β(n+α– )q–+γp+
β(p+–q–)
,n+αtβ–aβp+,
which implies
x(t) (tβ–aβ)
p+ ≥ϒq–
a
b–β–αKlow
a+(α)n! B
β(n+α– )q–+γp+
β(p+–q–)
,n+α
.
Hence
ϒp+
a ≥ϒaq–
b–β–αKlow
a+(α)n! B
β(n+α– )q–+γp+
β(p+–q–)
,n+α
,
and so
ϒa≥
b–β–αKlow
a+(α)n! B
β(n+α– )q–+γp+
β(p+–q–)
,n+α
p+–q–
Consequently, we arrive at
x(t)≥ϒatβ–aβ
≥
b–β–αKlow
a+(α)n! B
β(n+α– )q–+γp+
β(p+–q–)
,n+α
p+–q–
tβ–aβ.
Sincea∈(,T) is arbitrarily, we have
x(t)≥
b–β–αKlow
a+(α)n!
B
β(n+α– )q–+γp+
β(p+–q–)
,n+α
p+–q–
tβ=F(t).
Hence we can complete the proof.
To solve equation (), we introduce an operatorSh,g: [F,G]⊂PM→C[,T] by
Sh,g(x)(t) =h–
β–α (α)
t
K(t,s)sγ–
(tβ–sβ)–α
gx(s)ds
, t∈[,T]. ()
Lemma . The operator Sh,gmaps the order interval[F,G]into itself. Proof To achieve our aim, we only need to verify thatSF≥FandSG≤G:
hF(t)≤β
–α (α)
t
K(t,s)sγ–
(tβ–sβ)–α
gF(s)ds, t∈[,T], ()
hG(t)≥ β
–α (α)
t
K(t,s)sγ–
(tβ–sβ)–α
gG(s)ds, t∈[,T]. ()
First we show equation ():
β–α (α)
t
K(t,s)sγ–
(tβ–sβ)–α
gF(s)ds
≥b–β–αAq–Klow
(α)n!
t
tβ–sβn+α–sq–τ–+γ–ds
=b–β
–αAq–K
low
(α)n! B
q–τ–+γ
β ,n+α
tβ(n+α–)+q–τ–+γ =a+Ap+tp+τ–≥h
F(t).
Secondly we derive equation ():
β–α (α)
t
K(t,s)sγ–
(tβ–sβ)–α
gG(s)ds
≤b+β–αBq+Kup
(α)n!
t
tβ–sβn+α–sq+τ++γ–ds,
=b+β
–αBq+K
up
(α)n! B
q+b+γ
β ,n+α
tβ(n+α–)+q+τ++γ
=a–Bp–tp–τ+≤h
Since obviously, the operatorSis strictly increasing in [F,G] and ifx∈[F,G] thenF(t)≤ x(t)≤G(t) <M,t∈[,T]. Hence
hF(t)≤ β
–α (α)
t
K(t,s)sγ–
(tβ–sβ)–α
gF(s)ds
≤ β–α
(α)
t
K(t,s)sγ–
(tβ–sβ)–α
gx(s)ds
≤ β–α
(α)
t
K(t,s)sγ–
(tβ–sβ)–α
gG(s)ds
≤hG(t),
so
β–α (α)
t
K(t,s)sγ–
(tβ–sβ)–α
gx(s)ds∈,hG(t)=h,G(t).
Consequently,Sh,gis well defined andSh,g([F,G])⊂[F,G]. The proof is completed.
From the Arzela-Ascoli theorem and sinceSh,g: [F,G]→[F,G] is nondecreasing, it fol-lows thatSh,gis compact, so the Schauder fixed point theorem implies the following exis-tence result [, , ].
Theorem . Equation()has a solution in[F,G].Moreover,
lim
n→∞S n
h,g(F) =x– and lim
n→∞S n
h,g(G) =x+
are fixed points of Sh,gwith F≤x–≤x+≤G.
Now we are ready to state the following uniqueness result. But first we note that the above considerations can be repeated for any <T ≤T, so we getKlow(T),Kup(T),
A(T),B(T),FT, andGTas continuous functions ofT. NoteKlow(T) is nonincreasing, Kup(T) is nondecreasing, andKlow(T),Kup(T) can be continuously extended toT= .
ThenKlow() =Kup(). We still keep the notationKlow=Klow(T),Kup=Kup(T),F=FT,
andG=GT.
Theorem . If there are constantsψ,χand continuous functions ag(t) > and ah(t) > on[,T]such that
ah(T)tψx(t) –y(t)≤h
x(t)–hy(t),
gx(t)–gy(t)≤ag(T)tχx(t) –y(t),
()
for all T∈(,T],t∈(,T],x,y∈[FT,GT]then equation()has a unique solution in
[F,G]provided we have
and
:=ag()β
–αK
up()
ah()(α)n! B
χ+γ+τ+
β ,n+α
β(n+α–)+χ+γ–ψ< , ()
where we set= .
Proof For anyx,y∈[F,G] we setx=Sh,g(x) andy=Sh,g(y). Clearly, we have
x–yq:= sup t∈(,T]
|x(t) –y(t)| tτ+( +ιt)≤B
forq(t) =tτ+( +ιt) with> andι> specified below, so [F,G]⊂Mq. Then for any t∈(,T], we derive
ah(t)tψx(t) –y(t)≤h
x(t)
–hy(t)
≤ β–α
(α)
t
K(t,s)sγ–
(tβ–sβ)–α
gx(s)–gy(s)ds
≤ag(t)β–αKup(t)
(α)n!
t
tβ–sβn+α–sχ+γ–x(s) –y(s)ds
≤ag(t)β–αKup(t)
(α)n!
t
tβ–sβn+α–sχ+γ+τ+–ds
+ι
t
tβ–sβn+α–sχ+γ+τ++–ds
x–yq
=ag(t)β
–αK
up(t)
(α)n!
B
χ+γ+τ+
β ,n+α
tβ(n+α–)+χ+γ+τ+
+ιB
χ+γ+τ++
β ,n+α
tβ(n+α–)+χ+γ+τ++
x–yq,
which implies
|x(t) –y(t)|
tτ+( +ιt) ≤
ag(t)β–αK
up(t)
ah(t)(α)n!( +ιt)
B
χ+γ +τ+
β ,n+α
tβ(n+α–)+χ+γ–ψ
+ιB
χ+γ +τ++
β ,n+α
tβ(n+α–)+χ+γ+–ψ
x–yq,
consequently, we obtain
Sh,g(x) –Sh,g(y)q≤Lx–yq ∀x,y∈[F,G] ()
with
L:= sup
t∈(,T]
L(t), L(t) =L(t) +L(t),
L(t) :=
ag(t)β–αK
up(t)
ah(t)(α)n!( +ιt)B
χ+γ +τ+
β ,n+α
tβ(n+α–)+χ+γ–ψ,
L(t) :=
ιag(t)β–αK
up(t)
ah(t)(α)n!( +ιt)B
χ+γ+τ++
β ,n+α
Since (note equation ())
L(t)≤
ιtag(t)β–αK
up
ah(t)(α)n!( +ιt)B
χ+γ +τ++
β ,n+α
Tβ(n+α–)+χ+γ–ψ
≤ag(t)β–αKup
ah(t)(α)n! B
χ+γ +τ++
β ,n+α
Tβ(n+α–)+χ+γ–ψ
andB(χ+γ+τ++
β ,n+α)→ as →+∞, we see that
sup
t∈(,T]
L(t) <
–
for any> sufficiently large uniformly for anyι> . So we take and fix such a. Next, by equation () there is at∈(,T] so that
L(t)≤
ag(t)β–αK
up(t)
ah(t)(α)n! B
χ+γ +τ+
β ,n+α
tβ(n+α–)+χ+γ–ψ< + <
for anyt∈(,t]. Furthermore, fort∈[t,T], we have (note equation ())
L(t)≤
maxt∈[t,T]ag(t)β
–αK
up
ah(t)(α)n! B
χ+γ+τ+
β ,n+α
Tβ(n+α–)+χ+γ–ψ +ιt
≤ +
<
for anyι> sufficiently large, so we fix suchι> . Consequently we get
sup
t∈(,T]
L(t)≤
+ .
Summarizing we see that there is > andι> so that
L≤ + +
– =
+ < .
This shows thatSh,g: [F,G]→[F,G] is a contraction with respect to the norm · qwith a constantL. By the contraction mapping principle, one can obtain the result immediately.
Remark . Consider equation (). Of course, we can supposep> =q. Thenp±=p, q±= ,a±=b±= , andτ±=τ:= β(n+pα––)+γ. Moreover, Remark . can be applied to get an existence result. If in additionKlow> thenB≥A> , and it is not difficult to see that
ψ= (p– )τ,χ= ,ag(T) = , and
ah(T) =pAp–(T) =p
β–αKlow(T)
(α)n! B
β(n+α– ) +γp β(p– ) ,n+α
.
Thenβ(n+α– ) +χ+γ =ψ, so equation () holds. Next, we derive
= Kup() pKlow()
B(γβ+τ,n+α)
B(β(n+βα(p–)+–)γp,n+α)=
Kup()
pKlow()
Hence condition () is satisfied and then we get a uniqueness result by Theorem .. Note there is gap in the proof of [, Theorem ]. So here we give its correct proof.
4 General solutions of Erdélyi-Kober-type integral equations
This section is devoted to a derivation of explicit solutions of some Erdélyi-Kober-type integral equations. In order to establish this, we introduce the following useful result.
Lemma . Letσ η+β> –σ andα,σ> .Then
EKI α
+;σ,ηt β
(x) = (η+ + β σ) (η+ +α+βσ)x
β .
Proof Sett=xy. By using Lemma ., we have
EKI α
+;σ,ηt β
(x) = σx
–σ(α+η)
(α)
x
tσ η+σ–tβdt (xσ–tσ)–α = σx
β
(α) σB
σ η+σ+β
σ ,α
= (η+ + β σ) (η+ +α+βσ)x
β .
This completes the proof.
Now we are ready to present our main result of this section.
Theorem . Letα> ,σ> , βσ +η+ > ,m,b,β∈R,and a,N,m= .Then equation
()is solvable and its solutionϕ(x)can be written as
ϕ(x) =CNx
β
N, ()
where the constant C satisfies the following equation:
CmN =aC (η+ + β σ)
(η+ +α+βσ)+b. ()
Proof With the help of Lemma ., substituting equation () into (), we find thatC sat-isfies equation () which completes the proof.
5 Illustrative examples
In this section, we pay our attention to show three numerical performance results.
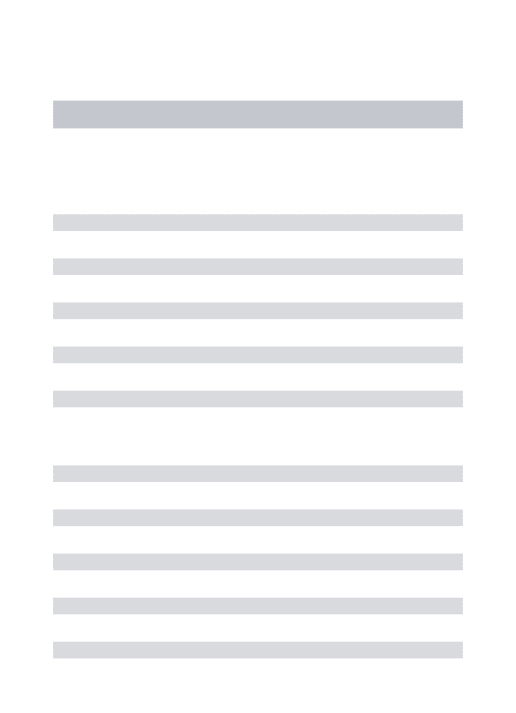
Example . We consider the problem
x(t) = (
)
()
t
ts–
(t–s)
Figure 1 Solution of equation (23) and the boundariesFandGfor Example 5.1 coincide with the unique solution.
First, Theorem . gives the exact solutionx(t) =, √
πt
,
.
= .t.of equation
(). Next, by changingx(t) =z(t)twe get
z(t) =(
)
()
t
s
(t–s)
z(s)ds, t∈[, ]. ()
Of course, we get a solutionz(t) =, √
πt
, . In equation () for (), we setK(t,s) = ,
α=,γ =,β=,n= ,T= ,p= , andq= . After some computation, we find that
F(t) =G(t) = ()B
,
t =, √
πt
, .
Obviously, all the assumptions in Theorem . are satisfied. Numerical result is given in Figure .
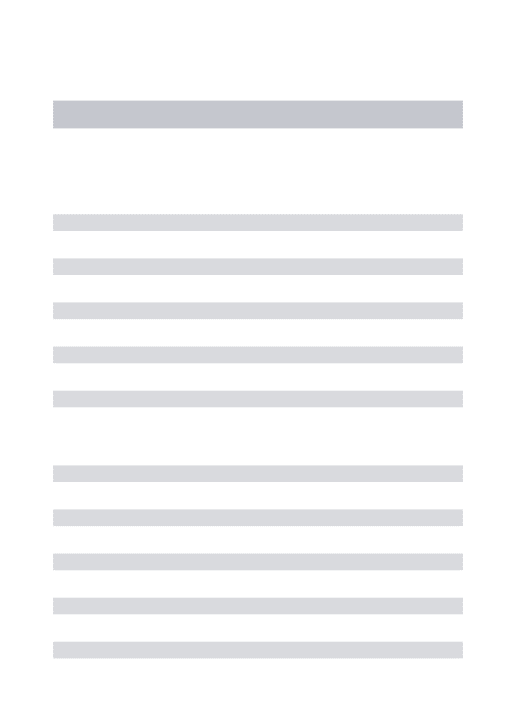
Example . In equation (), we setK(t,s) =et,α=
,β=γ=
,n= ,T= ,p= , and
q= . Now, we turn to consider the following homogeneous Abel-type integral equation with weakly singular kernels and power-law nonlinearity:
x(t) = (
)
( )
t
ets–
(t –s)
x(s)ds, t∈[, ]. ()
After some computation, we find that
F(t) = (
)–
()B
,
t = (
)
√π t
= .t. .,
G(t) =e
( )
–
() B
,
t = e
()t
= .t. ..
Figure 2 Solution (black line) of equation (25) and the boundariesF(red line) andG(blue line) for Example 5.2.
Figure 3 Solution (black line) of equation (26) and the boundariesF(red line) andG(blue line) for Example 5.3.
Example . In equation (), we setK(t,s) =et,α=
,β=γ =
,n= ,T= ,p±= ,
q±= ,h(x) =x( – x),g(x) =x, andM= . Now, we turn to considering the follow-ing homogeneous Abel-type integral equation with weakly sfollow-ingular kernels and polyno-mial law nonlinearity:
x(t)
– x(t)
=(
)
()
t
ets–
(t –s)
It is clear that nowa+= ,a–=, andb±= , so equation () holds. After some computa-tion, we find that
F(t) = (
)
–
()B
,
t = (
)
√π t
= .t. .,
G(t) =e
( )–
( )
B
,
t = e(
)
√
π t
= .t. ..
Since nowA= . < .. =. B<M= , obviously, all the assumptions in Theo-rem . are satisfied. Then, the problem (.) has a solution in [F,G]. Numerical results are given in Figure .
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The work presented here was carried out in collaboration between the authors. The authors contributed to every part of this study equally and read and approved the final version of the manuscript.
Author details
1School of Mathematics and Computer Science, Guizhou Normal College, Guiyang, Guizhou 550018, P.R. China. 2Department of Mathematics, Guizhou University, Guiyang, Guizhou 550025, P.R. China.3Department of Mathematical Analysis and Numerical Mathematics, Comenius University, Mlynská dolina, Bratislava, 842 48, Slovakia.4Mathematical Institute, Slovak Academy of Sciences, Štefánikova 49, Bratislava, 814 73, Slovakia.
Acknowledgements
The first and second authors acknowledge the support by National Natural Science Foundation of China (11201091) and Key Projects of Science and Technology Research in the Chinese Ministry of Education (211169), Key Support Subject (Applied Mathematics), Key Project on the Reforms of Teaching Contents and Course System of Guizhou Normal College and Doctor Project of Guizhou Normal College (13BS010). The third author acknowledges the support by Grants VEGA-MS 1/0071/14, VEGA-SAV 2/0029/13 and APVV-0134-10.
Received: 14 October 2013 Accepted: 19 December 2013 Published:17 Jan 2014
References
1. Mann, WR, Wolf, F: Heat transfer between solids and gases under nonlinear boundary conditions. Q. Appl. Math.9, 163-184 (1951)
2. Goncerzewicz, J, Marcinkowska, H, Okrasinski, W, Tabisz, K: On percolation of water from a cylindrical reservoir into the surrounding soil. Zastos. Mat.16, 249-261 (1978)
3. Keller, JJ: Propagation of simple nonlinear waves in gas filled tubes with friction. Z. Angew. Math. Phys.32, 170-181 (1981)
4. Atkinson, KE: An existence theorem for Abel integral equations. SIAM J. Math. Anal.5, 729-736 (1974) 5. Bushell, PJ, Okrasinski, W: Nonlinear Volterra integral equations with convolution kernel. J. Lond. Math. Soc.41,
503-510 (1990)
6. Gorenflo, R, Vessella, S: Abel Integral Equations. Lecture Notes in Mathematics, vol. 1461. Springer, Berlin (1991) 7. Okrasinski, W: Nontrivial solutions to nonlinear Volterra integral equations. SIAM J. Math. Anal.22, 1007-1015 (1991) 8. Gripenberg, G: On the uniqueness of solutions of Volterra equations. J. Integral Equ. Appl.2, 421-430 (1990) 9. Mydlarczyk, W: The existence of nontrivial solutions of Volterra equations. Math. Scand.68, 83-88 (1991) 10. Kilbas, AA, Saigo, M: On solution of nonlinear Abel-Volterra integral equation. J. Math. Anal. Appl.229, 41-60 (1999) 11. Karapetyants, NK, Kilbas, AA, Saigo, M: Upper and lower bounds for solutions of nonlinear Volterra convolution
integral equations with power nonlinearity. J. Integral Equ. Appl.8, 421-448 (2000)
12. Diogo, T, Lima, P: Numerical solution of a nonuniquely solvable Volterra integral equation using extrapolation methods. J. Comput. Appl. Math.140, 537-557 (2002)
13. Buckwar, E: Existence and uniqueness of solutions of Abel integral equations with power-law non-linearities. Nonlinear Anal. TMA63, 88-96 (2005)
14. Cima, A, Gasull, A, Mañosas, F: Periodic orbits in complex Abel equations. J. Differ. Equ.232, 314-328 (2007) 15. Giné, J, Santallusia, X: Abel differential equations admitting a certain first integral. J. Math. Anal. Appl.370, 187-199
(2010)
16. Gasull, A, Li, C, Torregrosa, J: A new Chebyshev family with applications to Abel equations. J. Differ. Equ.252, 1635-1641 (2012)
19. Kilbas, AA, Srivastava, HM, Trujillo, JJ: Theory and Applications of Fractional Differential Equations. Elsevier, Amsterdam (2006)
20. Lakshmikantham, V, Leela, S, Devi, JV: Theory of Fractional Dynamic Systems. Cambridge Scientific Publishers, Cambridge (2009)
21. Miller, KS, Ross, B: An Introduction to the Fractional Calculus and Differential Equations. Wiley, New York (1993) 22. Michalski, MW: Derivatives of Noninteger Order and Their Applications. Dissertationes Mathematicae, vol. CCCXXVIII.
Inst. Math., Polish Acad. Sci., Warszawa (1993)
23. Podlubny, I: Fractional Differential Equations. Academic Press, New York (1999)
24. Tarasov, VE: Fractional Dynamics: Application of Fractional Calculus to Dynamics of Particles, Fields and Media. Springer, Berlin (2011)
25. Balachandran, K, Park, JY, Julie, MD: On local attractivity of solutions of a functional integral equation of fractional order with deviating arguments. Commun. Nonlinear Sci. Numer. Simul.15, 2809-2817 (2010)
26. Banás, J, O’Regan, D: On existence and local attractivity of solutions of a quadratic Volterra integral equation of fractional order. J. Math. Anal. Appl.345, 573-582 (2008)
27. Bana´s, J, Rzepka, B: Monotonic solutions of a quadratic integral equation of fractional order. J. Math. Anal. Appl.322, 1371-1379 (2007)
28. Bana´s, J, Zajac, T: Solvability of a functional integral equation of fractional order in the class of functions having limits at infinity. Nonlinear Anal. TMA71, 5491-5500 (2009)
29. Bana´s, J, Zajac, T: A new approach to the theory of functional integral equations of fractional order. J. Math. Anal. Appl.375, 375-387 (2011)
30. Bana´s, J, Rzepka, B: The technique of Volterra-Stieltjes integral equations in the application to infinite systems of nonlinear integral equations of fractional orders. Comput. Math. Appl.64, 3108-3116 (2012)
31. Darwish, MA: On quadratic integral equation of fractional orders. J. Math. Anal. Appl.311, 112-119 (2005)
32. Wang, J, Dong, X, Zhou, Y: Existence, attractiveness and stability of solutions for quadratic Urysohn fractional integral equations. Commun. Nonlinear Sci. Numer. Simul.17, 545-554 (2012)
33. Wang, J, Dong, X, Zhou, Y: Analysis of nonlinear integral equations with Erdélyi-Kober fractional operator. Commun. Nonlinear Sci. Numer. Simul.17, 3129-3139 (2012)
34. Bohl, E: Monotonie: Löbarkeit und Numerik bei Operatorgleichungen. Springer, Berlin (1974) 35. Zeidler, E: Applied Functional Analysis: Applications to Mathematical Physics. Springer, New York (1995) 36. Prudnikov, AP, Brychkov, YA, Marichev, OI: Integral and Series: Elementary Functions, vol. 1. Nauka, Moscow (1981) 37. Gradshteyn, IS, Ryzhik, IM: Table of Integrals, Series, and Products, 7th edn. Academic Press, Amsterdam (2007) 38. Okrasinski, W: Nonlinear Volterra equations and physical applications. Extr. Math.4, 51-80 (1989)
39. Schneider, W: The general solution of a nonlinear integral equation of convolution type. Z. Angew. Math. Phys.33, 140-142 (1982)
10.1186/1687-2770-2014-20
Cite this article as:Wang et al.:Analysis of Abel-type nonlinear integral equations with weakly singular kernels.