ABSTRACT
ZHANG, YIWEN. Selected Topics in Statistical Computing. (Under the direction of Dr. Hua Zhou.)
As the connection between statistical models and the real data, optimization methods
draw attentions from both academia and industries. Since advances in technology enable
easier data collection, complex models are in demand to cope with data that have
com-plex structures; efficient optimization methods are needed to perform analysis on large
and ever-growing volumes of data. In this dissertation, we investigate the optimization
methods that target at these two issues. The first half of the thesis focuses on
develop-ing and implementdevelop-ing optimization algorithms for multivariate generalized linear models
(MGLM), while the second half addresses the problems with large data sets.
Data with multivariate count responses frequently occur in modern applications. The
commonly used multinomial-logit model is limiting due to its restrictive mean-variance
structure. For instance, analysis of count data from the recent RNA-seq technology by
the multinomial-logit model leads to serious errors in hypothesis testing. The ubiquity
of over-dispersion and complex correlation structures among multivariate counts call for
more flexible regression models. In this dissertation, we study some generalized linear
models with multivariate count responses that incorporate various correlation structures
among the components of the response vector. Current literature lacks treatment of
these models, partly due to the fact that they do not belong to the natural exponential
family. We derive stable optimization algorithms under the minorization-maximization
(MM) principle. Parameter estimation, testing, and variable selection for these models are
treated in a unifying framework. The regression models are compared on both synthetic
Traditional iterative optimization algorithms require the whole data set to be
avail-able in memory for each iteration. When analyzing large data sets, this optimization
scheme makes the computation sensitive to the memory limit. We investigate the online
optimization algorithms that provide elegant solutions to the analysis on large data sets.
Instead of keeping the whole data set in memory, online algorithms only keep a small
batch of data points in memory at each iteration, and process every data point once. We
© Copyright 2014 by Yiwen Zhang
Selected Topics in Statistical Computing
by Yiwen Zhang
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Doctor of Philosophy
Statistics
Raleigh, North Carolina
2014
APPROVED BY:
Dr. Eric Laber Dr. Lexin Li
Dr. Brian Reich Dr. Hua Zhou
DEDICATION
BIOGRAPHY
The author was born in Fushun, China. She got her bachelor’s degree from Shanghai
Uni-versity of Finance and Economics, majoring in Economics, and minoring in Accounting.
In the year 2009, she enrolled in the master’s program in North Carolina State
Univer-sity Department of Statistics where she switched to the Ph.D. program a year later. She
ACKNOWLEDGEMENTS
I would like thank my advisor, Dr. Hua Zhou, for his endless patience and constant
help. There is no way I can finish my projects without his input. I have the highest
regard for his passion in research and knowledge in statistics. He has brought me the
inspiration and opened my horizon. When obstacles show up, being cynical is easy, while
staying positive and gathering the self delusion to work on where others have failed,
is not. My advisor’s genuine curiosity and optimism have illuminated our research; his
persistence and integrity have propelled us moving forward. Other than research, it is
very rewarding to work with Dr. Hua Zhou. When he spent tireless efforts helping me
revise my dissertation and was not willing to settle for any imperfection, he demonstrated
the standard he lives by. That is also the standard I want to live up to. There is a lot
more beyond intelligence that I need to earn the degree, as well as all the glory comes
with it. I am blessed to have such an adviser.
I can not make this far without the faculty and staff at North Carolina State.
Espe-cially, I want to express my gratitude to Dr. Pam Arroway for believing in me, encouraging
me, and finding me funding opportunities. I appreciate the research assistantship
posi-tion that Dr. Sharon Schulze offered me. That posiposi-tion gave me precious opportunities
to explain statistical results to non-statisticians, which became an important part of the
training that I could not get in the classroom. I also want to thank Dr. Jackie
Hughes-Oliver, Dr. Sujit Ghosh, Dr. John Monahan, Dr. Kim Weems, and Dr. Howard Bondell
for taking care of all the paperwork, making sure that I make choices that serves the
most benefit to my long-term career. I also want to thank Alison McCoy for her
hart-warming smile. I want to give special thanks to my Ph.D. committee members, Dr. Eric
given by these brilliant professors encouraged me to be critical to my research topic, to
be meticulous in the research process, and to make better presentation of my research
results. Improvements can not be achieved without their input.
I am also thankful to the opportunity to work at BD Technologies. My manager,
Elaine McVey, gave me invaluable advices on how to be a good statistical consultant.
She showed me the energy and insights a statistician can bring to a project. She provided
me the freedom to explore interesting methodologies and tools. I also want to thank my
co-workers, Yongji Fu, Steven Keith, Frances Tong, and Perry Haaland for making my
internship experience fruitful and memorable.
Finally, I want to thank all my family and friends for their unconditional love and
supports. My parents have always been caring and understanding, even though me being
in another country makes it hard on them. I am grateful that they keep their concerns to
themselves and let me do whatever I want. I am blessed to have the friend who is always
ready to provide consolation, fix bad days, and clear my uncertainties. The emotional
TABLE OF CONTENTS
LIST OF TABLES . . . viii
LIST OF FIGURES . . . x
Chapter 1 Introduction . . . 1
1.1 Optimization Methods Overview . . . 1
1.2 Multivariate Generalized Linear Models . . . 12
1.3 Online Optimization . . . 14
1.4 Plan of Dissertation . . . 15
Chapter 2 EM vs MM Principles . . . 16
2.1 Introduction . . . 17
2.2 Problem Setup and a Running Example . . . 19
2.3 EM Algorithm . . . 22
2.4 MM Algorithm . . . 25
2.5 An EM-MM Hybrid Algorithm . . . 28
2.6 Convergence Rates . . . 30
2.7 Numerical Experiments . . . 36
2.8 Conclusions . . . 38
Chapter 3 Optimization Methods for MGLM . . . 41
3.1 Motivation . . . 41
3.2 Models . . . 46
3.3 Estimation Difficulties . . . 78
3.4 MLE via IRPR . . . 81
3.5 Testing . . . 88
3.6 Regularization . . . 90
3.7 Numerical Examples . . . 95
3.7.1 Hypothesis Testing . . . 95
3.7.2 Variable Selection by Regularization . . . 96
3.7.3 Real Data . . . 101
3.8 Discussion . . . 114
Chapter 4 Software Implementation . . . 119
4.1 Introduction . . . 119
4.2 Model Fitting . . . 121
4.3 Regularization . . . 123
4.4 Optimization Algorithms and Implementation . . . 124
4.5.1 Distribution Fitting . . . 126
4.5.2 Regression . . . 130
4.5.3 Sparse Regression . . . 138
4.6 Discussion . . . 143
Chapter 5 Online Optimization . . . 146
5.1 Introduction . . . 146
5.2 Literature Review . . . 147
5.3 Online MM Algorithm . . . 157
5.3.1 Original MM . . . 157
5.3.2 Online MM Algorithm . . . 159
5.4 Convergence Properties . . . 162
5.5 Numerical Examples . . . 170
5.5.1 Dirichlet-multinomial Model Fitting by Online MM . . . 170
5.5.2 Linear Regression by Online MM . . . 173
5.5.3 Dirichlet-multinomial Regression by Online MM Gradient Algorithm184 5.5.4 Simulation Study . . . 186
LIST OF TABLES
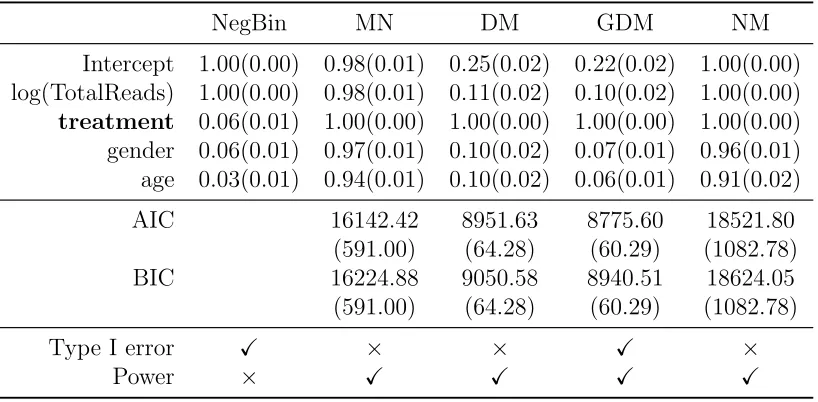
Table 3.1 Example of an RNA-seq data set. . . 44 Table 3.2 Empirical rejection rates for testing each predictor in the simulated
RNA-seq data. The boldfaced predictortreatment has non-zero effect on the exon expression counts. Gender and age have no effects on the expression counts. Numbers in the brackets are standard errors based on 300 simulation replicates. . . 46 Table 3.3 Generalized linear models for multivariate categorical responses. d:
di-mension of response vector;p: number of predictors in regression mod-els;m: the batch size|y|=P
jyjof the response vectory= (y1, . . . , yd);
|α|=P
jαj. . . 47
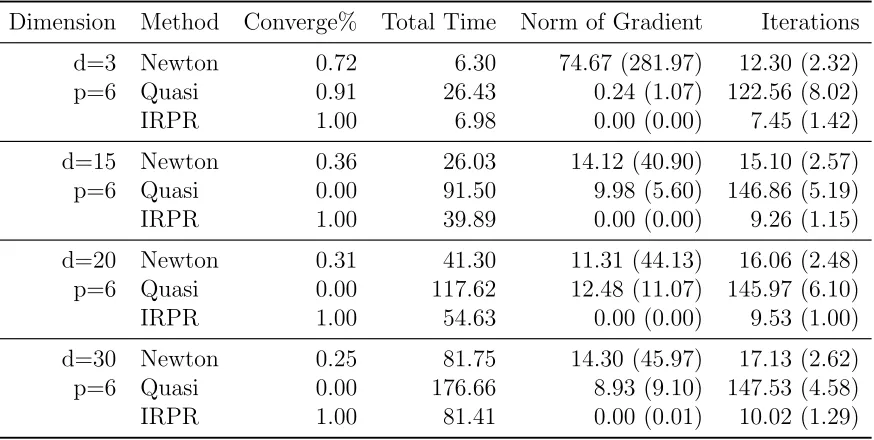
Table 3.4 Comparison of Newton, Quasi-Newton (BFGS), and IRPR methods for fitting Dirichlet-multinomial (DM) regression. Numbers in parenthesis are standard errors based on 100 simulation replicates. . . 80 Table 3.5 Empirical type I error and power of the Wald test by the multinomial
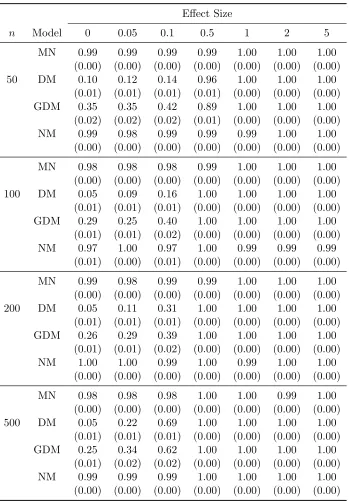
(MN), Dirichlet-multinomial (DM), generalized Dirichlet-multinomial (GDM), and negative multinomial (NM) regression models, based on 500 simulation replicates. Responses are generated from the multinomial (MN) model. Numbers in parenthesis are standard errors. . . 97 Table 3.6 Empirical type I error and power of the Wald test by the multinomial
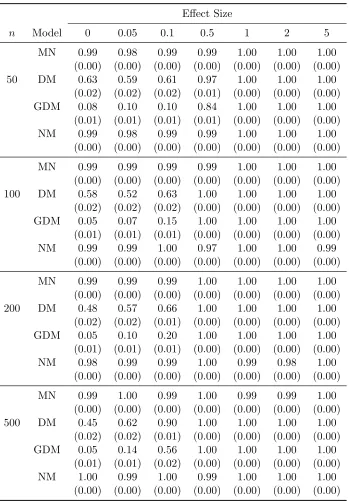
(MN), Dirichlet-multinomial (DM), generalized Dirichlet-multinomial (GDM), and negative multinomial (NM) regression models, based on 500 simulation replicates. Responses are generated from the Dirichlet-multinomial (DM) model. Numbers in parenthesis are standard errors. 98 Table 3.7 Empirical type I error and power of the Wald test by the multinomial
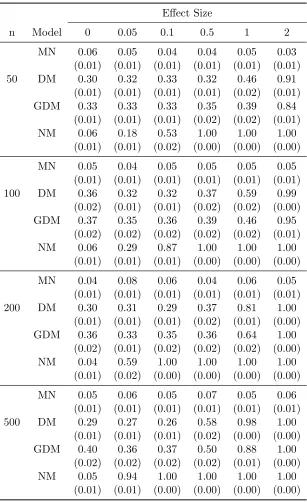
(MN), Dirichlet-multinomial (DM), generalized Dirichlet-multinomial (GDM), and negative multinomial (NM) regression models, based on 500 simulation replicates. Responses are generated from the general-ized Dirichlet-multinomial (GDM) model. Numbers in parenthesis are standard errors. . . 99 Table 3.8 Empirical type I error and power of the Wald test by the multinomial
Table 3.9 Summary of mean AUCs from the group-penalized estimation by the multinomial (MN), multinomial (DM), generalized Dirichlet-multinomial (GDM) and negative Dirichlet-multinomial (NM) regression models, based on 300 simulation replicates. Responses are generated from the multinomial (MN) model. Standard errors are presented in the paren-thesis. . . 104 Table 3.10 Summary of mean AUCs from the group-penalized estimation by the
multinomial (MN), multinomial (DM), generalized Dirichlet-multinomial (GDM) and negative Dirichlet-multinomial (NM) regression models, based on 300 simulation replicates. Responses are generated from the Dirichlet-multinomial (DM) model. Standard errors are presented in the parenthesis. . . 107 Table 3.11 Summary of mean AUCs from the group-penalized estimation by the
multinomial (MN), multinomial (DM), generalized Dirichlet-multinomial (GDM) and negative Dirichlet-multinomial (NM) regression models, based on 300 simulation replicates. Responses are generated from the generalized Dirichlet-multinomial (GDM) model. Standard errors are presented in the parenthesis. . . 110 Table 3.12 Summary of mean AUCs from the group-penalized estimation by the
multinomial (MN), multinomial (DM), generalized Dirichlet-multinomial (GDM) and negative Dirichlet-multinomial (NM) regression models, based on 300 simulation replicates. Responses are generated from the negative multinomial (NM) model. Standard errors are presented in the parenthesis. . . 113 Table 3.13 SNP signals on Chromosome 8 from eQTL analysis of ST13P6 by GDM
regression. . . 117
LIST OF FIGURES
Figure 2.1 Histogram of the 524 proportions in the Haseman and Soares data with a Beta(1.23,12.46) density imposed. . . 22 Figure 2.2 Graphs of minorization inequalities (2.9) and (2.10). . . 28 Figure 2.3 Algorithmic iterates for the HS76-1 data set. Left: Start from a blind
guess α(0) = (1,1). Right: Start from the method of moment estimate
α(0) = (0.4711,4.8072). . . 30 Figure 2.4 Distance of algorithmic iterates to the final solution kθ(t)−θ∞k
2 for
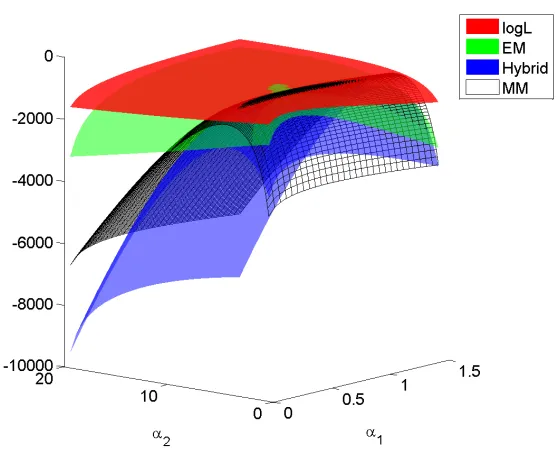
the HS76-1 data set. . . 32 Figure 2.5 Log-likelihood surface and the minorizing functions of EM, MM, and
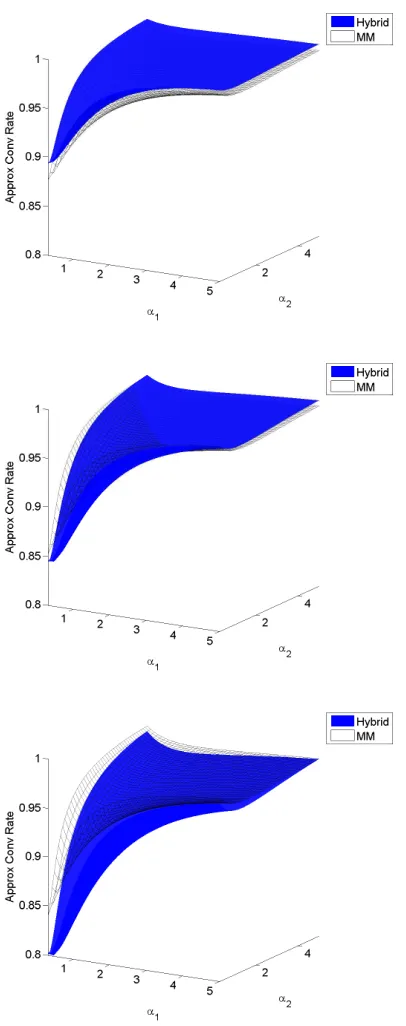
the EM-MM hybrid algorithms at point (0.5,5) for the HS76-1 data set. 33 Figure 2.6 Approximate convergence rates of the MM and hybrid algorithms for
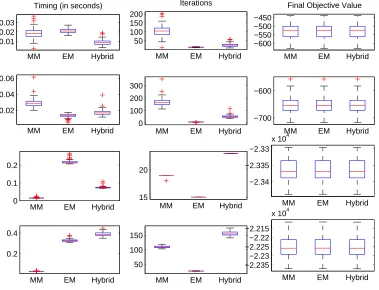
fitting the beta-binomial distribution (d= 2) when all data points have the same batch sizem. Top: m= 5; Middle: m = 10; Bottom: m= 20. 37 Figure 2.7 Comparison of algorithmic timing, convergence rates, and final
objec-tive values under different parameter values. Row 1:α= (0.1,1); Row 2:α= (0.2,2); Row 3: α1 =· · ·=α50 = 0.5; Row 4: α1 =· · ·=α50 =
5. The sample size isn = 200. The batch size ism= 20. There are 100 replicates in each scenario. Convergence criterion is 10−6. . . 39
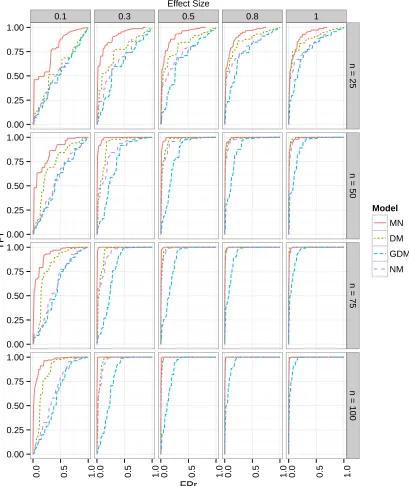
Figure 3.1 Left: A gene with 3 exons and all possible isoforms. Middle and right: Pairwise scatter plots and correlations of exon counts of a gene with 5 exons. . . 42 Figure 3.2 ROC curves from the group-penalized estimation by the multinomial
(MN), Dirichlet-multinomial (DM), and generalized Dirichlet-multinomial (GDM) regression models. ROC curves are summarized from 300 simu-lation replicates. Responses are generated from the multinomial (MN) model. . . 102 Figure 3.3 Box plots of AUCs from the group-penalized estimation by the
multino-mial (MN), Dirichlet-multinomultino-mial (DM), generalized Dirichlet-multinomultino-mial (GDM) and negative multinomial (NM) regression models, based on 300 simulation replicates. Responses are generated from the multino-mial (MN) model. . . 103 Figure 3.4 ROC curves from the group-penalized estimation by the multinomial
Figure 3.5 Box plots of AUCs from the group-penalized estimation by the multino-mial (MN), Dirichlet-multinomultino-mial (DM), generalized Dirichlet-multinomultino-mial (GDM) and negative multinomial (NM) regression models, based on 300 simulation replicates. Responses are generated from the Dirichlet-multinomial (DM) model. . . 106 Figure 3.6 ROC curves from the group penalized estimation by the
multino-mial (MN), multinomultino-mial (DM), and generalized Dirichlet-multinomial (GDM) regression models. ROC curves are summarized from 300 simulation replicates. Responses are generated from the gen-eralized Dirichlet-multinomial (GDM) model. . . 108 Figure 3.7 Box plots of AUCs from the group penalized estimation by the
multino-mial (MN), Dirichlet-multinomultino-mial (DM), generalized Dirichlet-multinomultino-mial (GDM) and negative multinomial (NM) regression models, based on 300 simulation replicates. Responses are generated from the GDM model.109 Figure 3.8 ROC curves from the group-penalized estimation by the multinomial
(MN), Dirichlet-multinomial (DM), and generalized Dirichlet-multinomial (GDM) regression models. ROC curves are summarized from 300 sim-ulation replicates. Responses are generated from the negative multino-mial (NM) model. . . 111 Figure 3.9 Box plots of AUCs from the group-penalized estimation by the
multino-mial (MN), Dirichlet-multinomultino-mial (DM), generalized Dirichlet-multinomultino-mial (GDM) and negative multinomial (NM) regression models, based on 300 simulation replicates. Responses are generated from the negative multinomial (NM) model. . . 112 Figure 3.10 QQ plots of eQTL analysis of ST13P6 using MN, DM, GDM and NM
regressions. ˆλs are the estimated genomic control (GC) inflation factor. 115 Figure 3.11 Manhattan plots of GDM, DM, MN, NM and NegBin regressions for
eQTL analysis of ST13P6. Dashed lines are chromosome-8-wide signif-icance level. . . 116
Figure 4.1 Fitted counts versus the observed counts based on the GDM model. 139 Figure 4.2 Variable selection by the group penalty. Left: BIC trace. Right:
Regu-larized estimate Bb(λ) at the optimal λ displayed in grayscale. . . 141
Figure 4.3 Low rank regression by the nuclear norm penalty. Left: BIC trace. Right: Regularized estimateBb(λ) at the optimalλdisplayed in grayscale.142
Figure 4.4 Select by parameter matrix entries with L1 norm penalty. Left: BIC trace. Right: Regularized estimateBb(λ) at the optimalλ displayed in
Figure 5.1 Log-likelihood value from fitting Dirichlet-multinomial model with dif-ferent algorithms. The data is generated from i.i.d. DM(1,1,1,1) with sample size 1000. The batch size of each data point is generated from i.i.d. Binomial(80,0.8). . . 173 Figure 5.2 Parameter estimates from fitting Dirichlet-multinomial model with
dif-ferent algorithms. The data is generated from i.i.d. DM(1,1,1,1) with sample size 1000. The batch size of each data point is generated from i.i.d. Binomial(80,0.8). . . 174 Figure 5.3 Case 1: RSS from fitting linear regression with online MM algorithms
and deterministic algorithm. The covariate matrix X is of size n×d,
n = 100, d = 4. Elements of X are generated from i.i.d. N(0,1).
β= 514.Y =Xβ+e, where eis a vector of random error generated
from i.i.d. N(0,1). . . 177 Figure 5.4 Case 1: Parameter estimates from fitting linear regression with online
MM algorithms and deterministic algorithm. The covariate matrix X
is of size n ×d, n = 100, d = 4. Elements of X are generated from i.i.d. N(0,1). β = 514. Y = Xβ+e, where e is a vector of random
error generated from i.i.d. N(0,1). . . 177 Figure 5.5 Case 2: RSS from fitting linear regression with online MM algorithms
and deterministic algorithm. The covariate matrix X is of size n×d,
n= 100,d= 4.X is generated from a multivariate normal distribution with mean0 and covariance matrixΣ1.β = 514. Y =Xβ+e, where
eis a vector of random error generated from i.i.d. N(0,1). . . 178 Figure 5.6 Case 2: Parameter estimates from fitting linear regression with online
MM algorithms and deterministic algorithm. The covariate matrix X
is of size n ×d, n = 100, d = 4. X is generated from a multivariate normal distribution with mean0 and covariance matrixΣ1. β= 514.
Y =Xβ+e, whereeis a vector of random error generated from i.i.d. N(0,1). . . 178 Figure 5.7 Case 3: RSS from fitting linear regression with online MM algorithms
and deterministic algorithm. The covariate matrix X is of size n×d,
n= 100, d = 20. X is generated from a multivariate normal distribu-tion with mean 0 and covariance matrix Σ2. β= 5120. Y =Xβ+e,
wheree is a vector of random error generated from i.i.d. N(0,1). . . . 179 Figure 5.8 Case 3: Parameter estimates of β1, β2, β3, β4 from fitting linear
re-gression with online MM algorithms and deterministic algorithm. The covariate matrix X is of size n×d, n = 100, d = 20. X is generated from a multivariate normal distribution with mean 0 and covariance matrix Σ2. β = 5120. Y = Xβ +e, where e is a vector of random
Figure 5.9 Case 1: RSS from fitting linear regression with online MM, LMS, and RLS. The covariate matrix X is of size n ×d, n = 10000, d = 4. Elements ofX are generated from i.i.d. N(0,1).β = 514.Y =Xβ+e,
wheree is a vector of random error, ei’s are i.i.d. N(0,1). . . 181
Figure 5.10 Case1: Parameter estimates from fitting linear regression with online MM, LMS, and RLS. The covariate matrixX is of sizen×d,n = 10000,
d = 4. Elements of X are generated from i.i.d. N(0,1). β = 514.
Y =Xβ+e, wheree is a vector of random error,ei’s are i.i.d. N(0,1). 181
Figure 5.11 Case 2: RSS from fitting linear regression with with online MM, LMS, and RLS. The covariate matrix X is of size n×d, n = 10000, d= 4.
X is generated from a multivariate normal distribution with mean 0 and covariance matrix Σ1.β = 514. Y =Xβ+e, where e is a vector
of random error, ei’s are i.i.d. N(0,1). . . 182
Figure 5.12 Case 2: Parameter estimates from fitting linear regression with online MM, LMS, and RLS. The covariate matrixX is of sizen×d,n = 10000,
d = 4. X is generated from a multivariate normal distribution with mean 0 and covariance matrix Σ1. β= 514. Y =Xβ+e, where eis
a vector of random error,ei’s are i.i.d. N(0,1). . . 182
Figure 5.13 Case 3: RSS from fitting linear regression with online MM, LMS, and RLS. The covariate matrix X is of size n×d, n = 10000, d = 20. X
is generated from a multivariate normal distribution with mean0 and covariance matrix Σ2. β = 5120. Y =Xβ+e, where e is a vector of
random error, ei’s are i.i.d. N(0,1). . . 183
Figure 5.14 Case 3: Parameter estimates of β1, β2, β3, β4 from fitting linear
re-gression with online MM, LMS, and RLS. The covariate matrix X is of size n×d, n = 10000, d = 20. X is generated from a multivariate normal distribution with mean 0and covariance matrix Σ2. β= 5120.
Y =Xβ+e, wheree is a vector of random error, ei’s are i.i.d. N(0,1).183
Figure 5.15 Log-likelihood value from fitting Dirichlet-multinomial regression with different algorithms. . . 186 Figure 5.16 Parameter estimates ofβ1from fitting Dirichlet-multinomial regression
with different algorithms. . . 187 Figure 5.17 Simulation results of Dirichlet-multinomial distribution parameter
Chapter 1
Introduction
1.1
Optimization Methods Overview
The central theme of this thesis is about optimization methods. Abundant research has
been done in this area. We first present some of the milestone optimization methods in this
section. Denote the target function as `(θ) whose maximum we seek, where θ∈Θ∈Rp
is the parameter of interest. To fix notation, differential d`(θ) is the row vector of the partial derivative of `(·) at θ and the gradient ∇`(θ) is the transpose of d`(θ). The Hessian matrix of `(θ) is denoted by d2`(θ).
Newton’s Method
Newton’s method has seen its popularity over years. It is the gold standard for speed
of convergence, and the basis of many variants. Taking second-order Taylor expansion
around the current iterate θ(t) gives
`(θ)≈`(θ(t)) +d`(θ(t))(θ−θ(t)) + 1
2(θ−θ
(t))T
Letd`(θ) = ∂`(θ)/∂θ and ∇`(θ) =d`(θ)T. Equating the gradient of the right hand side
of the equation to0
∇`(θ(t)) +d2`(θ(t))(θ−θ(t)) =0,
we can solve for the next iterate
θ(t+1)=θ(t)−d2`(θ(t))−1∇`(θ(t)).
Although it is easy to derive, Newton’s method has drawbacks. First, the
evalua-tion and inversion of the observed informaevalua-tion matrix −d2`(θ) can be computationally
expensive, especially when the dimensionality of the parameter is high. Second, the
al-gorithm does not guarantee to improve the target function at each iteration such that
`(θ(t+1)) > `(θ(t)). A strict ascending algorithm requires a positive definite observed
information matrix.
To address these issues, some variants of the Newton’s method are introduced, trying
to approximate −d2`(θ) with a positive definite matrix. We put down the general form
of Newton’s method
θ(t+1) =θ(t)+s[A(t)]−1∇`(θ(t)).
Here,s is a step length used in backtracking strategy, andAis a positive definite matrix. The value of s can be determined in different ways, such as step-halving, where s =
1,12, . . ., golden section search, and cubic interpolation.
Taking A = E[−d2`(θ)] gives Fisher’s scoring method. The expected information
matrix is positive definite, but could be hard to derive or computationally expensive to
evaluate.
Instead of providing an anlytical approximation of A, we can also approximate
−d2`(θ) numerically, which leads to the Quasi-Newton method. The approximation of
−d2`(θ) should be positive definite, closest to the previous approximation, and satisfy
the secant condition
∇`(θ(t−1))− ∇`(θ(t)) =A(θ(t−1)−θ(t)).
Popular Quasi-Newton updates include Davidon-Fletcher-Powell (DFP) rank-2 update.
The updated A(t)=X solves
minimize tr([A(t−1)]X−1)−log det([A(t−1)]X−1)
subject to X(θ(t−1)−θ(t)) =∇`(θ(t−1))− ∇`(θ(t))
for the next approximation A(t). The update is a low rank update from A(t−1). By the
Woodbury formula (Woodbury, 1950), we can get the updated [A(t)]−1 without directly
inverting A(t).
Another widely used Quasi-Newton update is the Broyden-Fletcher-Goldfarb-Shanno
(BFGS) rank-2 update (Nocedal and Wright, 2006). BFGS update [A(t)]−1directly, where
[A(t)]−1 =X solves
minimizing tr([A(t−1)]−1X)−log det([A(t−1)]−1X)
Expectation-Maximization (EM) Algorithm
The celebrated expectation-maximization (EM) algorithm (Baum et al., 1970a;
Demp-ster et al., 1977) is one of the most widely used optimization methods in statistics. To
maximize the target log-likelihood`(θ|Y) given the observed dataY, we first construct a complete dataX = (Y,Z) with log-likelihood f(Y,Z|θ). The idea is that the complete data model is easy to optimize, and we can solve for θ iteratively. The iterative two step procedure includes:
E step: compute the conditional expectation of the complete data model
Q(θ|θ(t)) = Eθ(t)[f(Y,Z|θ)|Y =y,θ(t)],
M step: maximizeQ(θ|θ(t)) updateθ(t+1)
θ(t+1) = arg max
θ Q(θ|θ
(t)).
EM algorithm is stable as the ascending property is guaranteed. By information
inequal-ity,
Q(θ|θ(t))−`(y|θ)
= E[f(Y,Z|θ)−`(Y|θ)|Y =y,θ(t)]
≤ E[f(Y,Z|θ(t))−`(Y|θ(t))|Y =y,θ(t)]
So,
`(y|θ(t+1))≥Q(θ(t+1)|θ(t))−Q(θ(t)|θ(t)) +`(y|θ(t))≥`(y|θ(t)).
EM algorithm depends on constructing complete data models, which limits its usage
to maximizing the log-likelihood functions.
Minorization-Maximization (MM) Principle
In recent years it has been realized that EM algorithm is a special case of the more general
minorization-maximization (MM) principle. The two ‘M’s in MM algorithm stand for
Minorization: find a surrogate functiong(θ) that satisfies
`(θ) ≥ g(θ|θ(t)), for all θ, `(θ(t)) = g(θ(t)|θ(t)).
Maximization: maximize g(θ) and get the updated parameter estimate
θ(t+1) = arg maxg(θ|θ(t)).
The ascent property is guaranteed as
`(θ(t+1))≥g(θ(t+1)|θ(t))≥g(θ(t)) =`(θ(t)).
MM principle possess some advantages over EM algorithm. First, as a general
functions. Second, by tactfully constructing the surrogate functions, MM algorithm can
save computing power and time. Third, when the dimension of the parameter is high,
MM principle could break it into low dimensional problems, which provides opportunities
to run sub-iterations in parallel.
EM algorithm is a special case of MM algorithm. TheQ(θ|θ(t)) function is a particular
surrogate function. There are cases that both EM and MM algorithms are easy to derive.
The convergence rate is of interest in such cases. In Chapter 2, we perform analysis on a
case study, and investigate the convergence rate of two algorithms. We find that different
algorithms converge at different rate, yet neither algorithm is definitively superior to the
other, and the actual convergence rate is subject to the data set.
The construction of surrogate functions becomes the key in deriving efficient
algo-rithms under MM principle. Manipulating inequalities usually leads to nice surrogate
functions. Let f(·) denote the function we try to maximize. Lange (1999) presented four
ways for constructing minorization functions,
Jensen’s inequality.f(·) is concave, then the minorization is
f(xT
y) =f X
i xiyi
!
≥X
i
xif(yi) =g(x|y).
Linear majorizatoin. f(·) is convex, then the minorization could be
f(x)≥f(y) +df(y)(x−y) =g(x|y).
Minorization with bounded curvature. Iff(·) is twice differentiable, then
f(x)≥f(y) +df(y)(x−y) + 1(x−y)T
where d2f(x)−B is positive definite.
Arithmetic geometric mean inequality. Foryi >0 andαi >0, and Piαi = 1,
−Y
i=1
yαi
i ≥ − X
i
αiyi =g(α|y).
Mairal (2013) made another summary of first order surrogate functions when the
target f(·) is possibly non-smooth.
Path Algorithm
We have been discussing maximization problems till now. In the following four small
sections, we abuse the notation `(θ) as the loss function, and target at minimizing it. Several important optimization algorithms emerged motivated by l1 penalized
re-gression. One of the most important is the homotopy algorithm proposed by Osborne
et al. (2000). Let X = (xT
1, . . . ,x
T
n)
T denote the covariates, where i = 1, . . . , n, x
i =
(xi1, . . . , xip)T,Y = (Y1, . . . , Yn)Tdenote the responses, β= (β1, . . . , βp)T denote the
cor-responding regression coefficients. The loss function is `(β) = 12||Xβ−Y||2, subject to
Pp
j=1|βj| ≤ λ, where λ > 0 is the constraint parameter. For the current iterate β(t), let
s={j :βj 6= 0}be the index set of nonzero coefficients, and |s|denote the cardinality of
s. Let P present the permutation matrix that collects the nonzero elements of β. Write
β(t)=PT
βs(t)
0
,X =PT
Xs Xsc
.
Let as = sign(βs) have entry 1 if the corresponding entry in βs is positive and −1
otherwise. The homotopy algorithm consists of three steps:
1. optimization. Solve minh`(β(t)+h), subject toaTs(β
(t)
s +hs)≤λ,h=PT h0s
solution is
hs = (XsTX)
−1[XT
s(y−Xsβs)−µas]
where µ= max
0,a T
s(X
T
sXs)−1XsTy−λ aT
s(XsTXs)−1as
.
2. deletion. Denoteβ†=β(t)+h. Check sign(β†
s) equalsas. We take out the element
ins that violates the equality the most until sign(βs†) = as.
3. check optimality condition. If the current solution does not satisfies the optimality
condition, we update the set s by adding an element that most violates the
op-timality condition, and return to the optimization step. Otherwise, the algorithm
terminates.
However, Osborne et al. (2000) is trying to solve penalized linear regression. Kim
et al. (2008) point out that the homotopy algorithm may fail to converge when the loss
function is not the squared error loss.
Path-wise Coordinate Descent
Targeting at the l1 regularized regression problem, Wu and Lange (2008) and Friedman
et al. (2007) both propose the “one-at-a-time” coordinate-wise descent algorithm. It
solves a sequences of single-parameter problems. Assuming that the covariate matrix X
is orthogonal for each single parameter, the lasso solution is a soft-thresholded solution
of the least square estimate βLS j ,
Thus, the high-dimensional optimization problem is reduced top one-dimensional
prob-lems. This solution holds when the covariates are uncorrelated. When the covariates are
correlated, consider
`(β|βk= ˜βk, k6=j) =
1 2
t X
i=1
yi− X k6=j
xikβ˜k−xijβj !2
+λX
k6=j
|β˜j|+λ|βj|.
Minimizing the above function with respect toβj, we get
˜
βj =S t X
1=1
xij(yi−y˜
(j)
i ), λ !
.
Although coordinate descent algorithms enjoy simplicity and computation efficiency, its
convergence requires that `(θ) is convex and differentiable.
Proximal Gradient Method
The goal of proximal gradient method is to optimize convex non-smooth functions. It
requires the target function `(θ) to be split into two terms and at least one of which is differentiable. Denote
`(θ) =f(θ) +h(θ),
where `(θ) is the target function, f(θ) is convex and differentiable, h(θ) is closed, con-vex, and possibly non-differentiable. Martinet (1970) first proposed the idea of proximal
gradient method. The proximal operator of a convex functionh(θ) is
proxh(θ0) = arg min
θ
h(θ) + 1
2||θ−θ0||
2 2
An important example is that when h(θ) =λ||θ||1. proxh is the soft thresholding
proxh(θi) =
θi−λ θi > λ
0 |θi| ≤λ
θi+λ θi <−λ.
Bruck Jr. (1977) proposed proximal gradient method
θ(t+1) = proxλ(t)h(θ(t)−λ(t)∇f(θ(t))),
whereλ(t) >0 is the step size,∇f is Lipschitz continuous with constantL, i.e.,k∇`(θ 1)−
∇`(θ2)k ≤ Lkθ1 −θ2k for all θ1,θ2, and the step size λ(t) ∈(0,L−1). The proximal
gra-dient method is a special case of MM algorithm. Here, the majorizing surrogate function
tof(θ) is
gλf(θ|θ(t)) = f(θ(t)) +df(θ(t))(θ−θ(t)) +
1
2λ||θ−θ
(t)||2 2.
Given θ(t),g
λf(θ|θ(t)) satisfies majorization property such that
gλf(θ(t)|θ(t)) = f(θ(t))
1 Initialize θ(0) = (θ1(0), . . . ,θd(0)
e ), and line search parameter a∈(0,1). Let
λ =λ(t−1). repeat
2 Let θtemp = proxλf(θ(t)−λ∇f(θ(t))) ; 3 Break if f(θtemp)≤gλ(θtemp|θ(t)) ; 4 Update λ=aλ.
5 until Loss function ` converges; 6 Return λ(t) =λ, θ(t+1) =θtemp.
Algorithm 1: The proximal gradient algorithm provided by Beck and Teboulle (2009a)
The proximal operator is defined as
proxλh(θ(t)) = arg min
θ
h(θ) + 1
2λ||θ−θ
(t)+λ∇f(θ(t))||2 2
= arg min
θ
h(θ) +f(θ(t)) +∇f(θ(t))T
(θ−θ(t)) + 1
2λ||θ−θ
(t)||2 2
= arg min
θ h(θ) +gλf(θ|θ
(t))
.
When L is unknown, the step size λ(t) can be found by line search. Algorithm 1 is the
proximal gradient algorithm with line search given by Beck and Teboulle (2009a).
Accelerated Proximal Gradient Method
The proximal gradient method converges at a linear rate O(1/t). Nesterov (1983)
pro-posed an accelerated proximal gradient method that keeps the same computation
com-plexity per iteration, but converges at a quadratic rateO(1/t2). It is a simple modification
of the original proximal gradient method. At each iteration, we get an extrapolation of
method based on the extrapolated point.
S(t+1) = θ(t+1)+at+1(θ(t+1)−θ(t))
θ(t+1) = proxλf(S(t+1)−λ∇f(S(t+1)))
whereat∈[0,1) is an extrapolation parameter. Note that the complexity of the
computa-tion is the same as the original proximal gradient method, and only first order informacomputa-tion
is used. Nesterov named it optimal first order method, as the convergence rate is
supe-rior to the original method, and can not be further improved (Nesterov, 1983). Different
versions of the accelerated proximal gradient method are proposed, including Nesterov
(2007); Tseng (2008); Beck and Teboulle (2009b).
1.2
Multivariate Generalized Linear Models
We utilize the above optimization principles to derive algorithms for multivariate
gen-eralized linear models (MGLM). Multivariate count data abound in modern application
areas such as genomics, sports, imaging analysis, and text mining. One of our motivation
is high-throughput data in genomics. Next generation sequencing technology has become
the primary choice for massive quantification of genomic features. The data obtained
from sequencing technologies are often summarized by counts: the number of DNA or
RNA fragments within a genomic interval (Wang et al., 2009; Sun et al., 2014; Trapnell
et al., 2012; Ernst and Kellis, 2012; Hoffman et al., 2012; Zeng et al., 2013).
Multinomial-logit model (McCullagh and Nelder, 1983) becomes a common choice
when analyzing such data, as available software provide handy tools to fit distribution
mean-variance structure and the implicit assumption that individual counts in the response
vector are negatively correlated. There are multivariate count models that account for
more complex correlation structures. For example the Dirichlet-multinomial model is
good when the counts in the response vector are negatively correlated but have
over-dispersion; the generalized Dirichlet-multinomial model is used when the counts in the
responses have both positive and negative correlations; the negative multinomial model,
which is a multivariate generalization of the negative binomial model can be used to
analyze positively correlated responses. Parameter estimation in these models is typically
hard because they do not belong to the exponential family. Due to the complexity of the
log-likelihood functions, there is no stable algorithm to get parameter estimate for these
models.
In Chapter 3, we develop algorithms that performs distribution fitting, regression, and
variable selection for all four multivariate generalized linear models, namely multinomial
logit (MN), Dirichlet-multinomial (DM), generalized Dirichlet-multinomial (GDM), and
negative multinomial (NM). We propose a unifying iteratively reweighted Poisson
re-gression (IRPR) method for maximum likelihood estimation, which is stable, scalable
to high dimensional data, and extremely simple to implement using existing softwares.
Hypothesis test methods for these models are also studied.
Algorithms for regulated estimates are also developed in Chapter 3. Three penalty
terms are considered: l1, group, and nuclear penalty. Unlike the univariate models where
the regression parameter is a vector, the parameter in multivariate models are matrices.
The three penalty types enable selection by entries, by rows, and by singular values. Both
group penalty and nuclear penalty leads to complex loss functions that MM algorithms
does not work. Another algorithm that is widely used in regularized regression, coordinate
proximal gradient method (Beck and Teboulle, 2009b) to derive the algorithm.
All the developed algorithms are implemented in the R package MGLM and Matlab
toolboxmglm.
1.3
Online Optimization
The optimization methods we have mentioned so far are all deterministic optimization
methods, where all the data points are available at the same time, and we use the whole
data set to iteratively solve for the optimum. In practice, a huge amount of data could
become available every second. The computation based on deterministic algorithms is
sensitive to the memory limit. How to efficiently perform statistical analysis on the large
cumulative data set becomes a challenging problem; how to update the statistical estimate
with the newly available data is a practical issue. In the last part of this dissertation, we
propose online optimization algorithms that address these issues.
The key idea is to update the parameter estimate based on only a small batch of the
data in each iteration, and the information of the whole data set is used after processing
through each of the small data batches. So, the algorithms is less memory intensive,
because only the small batch of data points are held on the memory in each iteration, and
each data point only gets processed once. The foundation of online algorithms is centered
on stochastic approximation theories. Some widely used deterministic algorithms have
their online analogs. For example, the stochastic gradient algorithms are the analogs of
the deterministic gradient based algorithms (Spall, 2003); Titterington (1984) proposed
an online version of the EM gradient method; Capp´e and Moulines (2009) complemented
the online EM algorithm. The online algorithms share some common properties with
construction of complete data models; the online gradient based algorithms also suffer
from stability issues. In this dissertation, we propose an online MM algorithm.
1.4
Plan of Dissertation
In Chapter 2, we present a case study comparing the EM and MM principles for the
maximum likelihood estimation of the Dirichlet-multinomial distribution. We also
pro-pose a new EM-MM hybrid algorithm that achieves faster convergence rate in this case.
In Chapter 3, we present the algorithms developed for multivariate generalized linear
models. In Chapter 4, we introduce the software package that implements the algorithms
Chapter 2
EM vs MM Principles
The celebrated expectation-maximization (EM) algorithm is one of the most widely used
optimization methods in statistics. In recent years it has been realized that EM
algo-rithm is a special case of the more general minorization-maximization (MM) principle.
Both algorithms create a surrogate function in the first (E or M) step that is maximized
in the second M step. This two step process always drives the objective function uphill
and is iterated until the parameters converge. The two algorithms differ in the way the
surrogate function is constructed. The expectation step of the EM algorithm relies on
calculating conditional expectations, while the minorization step of the MM algorithm
builds on crafty use of inequalities. For many problems, EM and MM derivations yield
the same algorithm. This chapter walks through the construction of both algorithms for
estimating the parameters of the Dirichlet-multinomial distribution. This particular case
is of interest because EM and MM derivations lead to two different algorithms with
com-pletely distinct operating characteristics. The EM algorithm converges fast but involves
solving a nontrivial maximization problem in the M step. In contrast the MM updates
shows faster convergence than the MM algorithm in certain parameter regimes. The local
convergence rates of the three algorithms are studied theoretically from the unifying MM
point of view and also compared on numerical examples.
2.1
Introduction
Numerical optimization methods have been intensively used by statisticians due to the
popularity of the maximum likelihood estimation. A powerful weapon among them is the
expectation-maximization (EM) algorithm (Dempster et al., 1977). The E step in the EM
algorithm creates aQfunction which is then maximized in the M step. In many problems
the surrogateQfunction is much simpler than the log-likelihood and thus the M step can
be solved analytically. These two steps iterate until the parameters converge. In recent
years, it has been realized that the EM algorithm is a special case of the more general
minorization-maximization (MM) principle (de Leeuw, 1994; Heiser, 1995; Lange et al.,
2000; Wu and Lange, 2010). The first M step of an MM algorithm creates a minorizing
function that is optimized in the second M step. TheQfunction in the EM algorithm is a
specific example of minorizing functions. Same as the EM algorithm, this two-step process
always drives the objective function uphill. The key difference between the two algorithms
is the construction of surrogate functions. The minorization step in the MM algorithm
hinges upon recognizing and manipulating inequalities, while EM algorithm relies on
calculating conditional expectations. Advantages enjoyed by both algorithms are their
numerical stability, natural adaption to parameter constraints, and scalability to high
dimensions. An open question has been raised whether any MM algorithm can be recast
as an EM algorithm (Meng, 2000). For instance, the MM algorithms for fitting
with appropriately chosen latent variables (Caron and Doucet, 2010). However, in these
worked out examples, the construction of missing data framework turns out non-intuitive
and irrelevant to the statistical model that generates the data. Taking the MM point of
view frees the derivation from the dependence on a missing data framework. For instance,
the recent article (Wu and Lange, 2010) demonstrates the potential of the MM algorithm
in random graph models, discriminant analysis, and image restoration problems where
there is no apparent missing data structure.
This chapter walks through the construction of both EM and MM algorithms for
the maximum likelihood estimation of the Dirichlet-multinomial distribution. For this
particular problem they produce two completely different algorithms. TheQ function in
the EM algorithm is fraught with special functions (digamma and trigamma) and the
M step resists analytical solutions and has to resort to iterative, multivariate Newton’s
method. In contrast, the surrogate function of the MM algorithm is much simpler and
yields trivial updates in the M step. Re-inspecting the M step of EM algorithm from
the MM perspective leads to an EM-MM hybrid algorithm which partially resolves the
difficulty in the M step of the EM algorithm. Similar hybrid algorithm is utilized in
fitting mixture of Plackett-Luce models for ranking data (Gromley and Murphy, 2008).
The local convergence rates of the MM and hybrid algorithms are studied theoretically
and demonstrated on numerical experiments. There is no clear winner in the sense that
one converges faster than the others in all parameter regimes.
As a road map to the remainder of this chapter, Section 2.2 lays out the problem
being studied and introduces a classical data set for numerical illustrations. EM and MM
algorithms are derived in Section 2.3 and 2.4 respectively. The difficulty in maximizing
the Q function in the EM algorithm can be partially remedied if we take the MM point
algorithm. Local convergence properties of the three algorithms are studied in Section
2.6. The operating characteristics (run time, convergence rates, and final objective values)
of the three algorithms are compared numerically under various parameter settings in
Section 2.7. We also provide some other options for solving this problem.
2.2
Problem Setup and a Running Example
Multivariate count data frequently arise in genetics (Lange, 2002; Tvedebrink, 2010;
Ionita-Laza and Laird, 2010), toxicology (Hines and Lawless, 1993), protein
homol-ogy detection (Sj¨olander et al., 1996), word burstiness modeling (Madsen et al., 2005),
and language modeling (MacKay and Bauman Peto, 1994). When multivariate count
data exhibit over-dispersion, the Dirichlet-multinomial distribution is preferred over the
familiar multinomial distribution. In the Dirichlet-multinomial sampling, the
multino-mial parameter p = (p1, . . . , pd) is modeled as a Dirichlet distribution with
parame-ter α = (α1, . . . , αd), where αj > 0. Accordingly, given a multivariate count vector x = (x1, . . . , xd) with batch size m =
Pd
j=1xj, the probability mass function under a
Dirichlet-multinomial model is
f(x|α) =
Z
∆d
m
x d
Y j=1
pxj
j
Γ(|α|)
Qd
j=1Γ(αj)
d Y j=1
pαj−1
j dp (2.1)
=
m
x Qd
j=1Γ(αj +xj)
Γ(|α|+m)
Γ(|α|)
Qd
j=1Γ(αj)
=
m
x Qd
j=1(αj)xj
|α|m
where|α|=Pdj=1αj and (a)k=Qk
−1
i=0(a+i) denotes the rising factorial. The last equality
is due to the fact Γ(a+k)/Γ(a) = (a)k. An alternative parametrization uses
πj =
αj
|α|, j = 1, . . . , d, θ=
1
|α|, (2.3)
in terms of the proportion vector π = (π1, . . . , πd) and the over-dispersion parameter θ.
For the sake of brevity, we stick to parametrization (2.2) in this article. The derivation
and most conclusions equally apply to both parameterizations. Given independent data
points x1, . . . ,xn, the log-likelihood is
`(α) =
n X
i=1
lnf(xi|α)
=
n X
i=1
ln
mi xi
+
n X
i=1
d X
j=1
xij−1
X k=0
ln(αj+k)− n X
i=1
mi−1
X k=0
ln(|α|+k) (2.4)
and the maximum likelihood estimation seeks the maximizer of (2.4). Most current
ap-plications utilize the Newton’s method for finding the MLE (Lange, 2002; Tvedebrink,
2010; Ionita-Laza and Laird, 2010), which may be numerically instable because the
objec-tive function (2.4) is non-concave. The alternaobjec-tive Fisher’s scoring algorithm replaces the
observed information matrix in Newton’s method by expected information matrix and
yields an ascent algorithm. However, the calculation of expected information matrix for
Dirichlet-multinomial model is expensive due to numerous evaluations of beta-binomial
tail probabilities (Paul et al., 2005). Recently Zhou and Lange (2010) devise the MM
algo-rithm for a whole class of multivariate discrete distributions which include the
Dirichlet-multinomial as a special case. Compared to the Newton’s method, the MM algorithm is
take up the alternative EM approach for maximizing the log-likelihood (2.4) and contrast
it to the MM algorithm in respect to algorithmic design, per iteration computation cost,
and local convergence rate.
As a numerical example we consider the classical data on the mice that are exposed to
various mutagens (Haseman and Soares, 1976). Environmental scientists are interested
in investigating the mutagenicity of a compound or irradiation in vivo in mice. Male
mice are treated with the suspect mutagen and then paired to one or more female mice.
Seventeen days after the initial exposure to a male, females are killed and their uteri are
examined for the presence of living and dead embryos (implants). In the first data set of
Haseman and Soares (1976), denoted by HS76-1 in following, there are n= 524 females
with the total number of implants per female mi varying from 1 to 20. Counts of dead
and survived implants are recorded for each female. Figure 2.1 displays the histogram
of the 524 proportions of dead implants. The variability in the proportions is prominent
and the traditional binomial distribution is inappropriate for such over-dispersion count
data. Fitting the beta-binomial distribution (d = 2) to the HS76-1 data set gives the
MLE ˆα= (1.23,12.46) with log-likelihood −777.79. The density of the beta distribution with parameter ˆα is imposed on the histogram in Figure 2.1 and demonstrates a good fit. The classical binomial fit gives a log-likelihood −842.61. The likelihood ratio test of
the over-dispersion parameter H0 : θ = (α1+α2)−1 = 0 vs H1 : θ > 0 yields a p-value
essentially 0, corroborating the appropriateness of a beta-binomial model.
The performances of the EM, MM and a hybrid algorithm on this data set will be
compared in Section 2.6. Note although we use a d= 2 data set as the running example
for ease of illustration and visualization, all our derivations and convergence rate results
are for generald and numerical experiments are carried out fordas high as 50 in Section
0 0.2 0.4 0.6 0.8 1 0
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
proportion of dead implants
frequency
Figure 2.1: Histogram of the 524 proportions in the Haseman and Soares data with a Beta(1.23,12.46) density imposed.
2.3
EM Algorithm
Derivation of EM algorithm hinges upon a missing data structure. Let f(θ) be the log-likelihood of the observed data with parameter vector θ. In the E step, a surrogate function Q(θ|θ(t)) is calculated as the conditional expectation of the complete data
log-likelihood given current parameter iterateθ(t). The well-known calculations (Baum et al.,
1970b; Dempster et al., 1977) demonstrate that theQfunction satisfies the fundamental
inequality
f(θ)−f(θ(t))≥Q(θ|θ(t))−Q(θ(t)|θ(t)). (2.5)
Maximizing the surrogate Q(θ|θ(t)) with respect to θ generates the next iterate θ(t+1)
which obviously drives the log-likelihood of the observed data uphill.
The admixture representation (2.1) of the Dirichlet-multinomial distribution naturally
the joint density of complete data by Qni=1f(xi,pi,α). Then the Qfunction is
Q(α|α(t)) = E " n
X i=1
f(xi,pi,α)|x1, . . . ,xn,α(t) #
,
where the expectation is with respect to the conditional distribution
f(p1, . . . ,pn|x1, . . . ,xn,α(t)),
i.e., independent Dirichlet(xi+α(t)). Therefore
Q(α|α(t)) =
n X
i=1
Qi(α|α(t))
with
Qi(α|α(t))
= Z
∆d
Γ(mi+|α(t)|)
Qd
j=1Γ(xij+α(jt))
Y
j
pxij+α
(t)
j −1
ij
·
ln
mi
xi
+
d
X
j=1
(xij+αj−1) lnpij+ ln Γ(|α|)−
d
X
j=1
ln Γ(αj)
dpi
= ln
mi
xi
+
d
X
j=1
(xij+αj−1)
h
Ψ(xij +α(jt))−Ψ(mi+|α(t)|)
i
+ ln Γ(|α|)−
d
X
j=1
ln Γ(αj).
Here Ψ(z) = Γ0(z)/Γ(z) is the digamma function and the exponential family
Therefore
Q(α|α(t)) =
n
X
i=1 ln
mi
xi
+
n
X
i=1
d
X
j=1
(xij +αj −1)
h
Ψ(xij +α(jt))−Ψ(mi+|α(t)|)
i
+nln Γ(|α|)−n
d
X
j=1
ln Γ(αj)
=
d
X
j=1
n
X
i=1
αj
h
Ψ(xij+α(jt))−Ψ(mi+|α(t)|)
i
−n
d
X
j=1
ln Γ(αj)
+nln Γ(|α|) +c(t). (2.6)
We use c(t) to collect constants that are irrelevant to the optimization and it may vary
in different equations. MaximizingQ(α|α(t)) is not trivial sinceαj are intertwined in the
ln Γ(|α|) term. The Newton’s method has to be utilized for the M step. The first two derivatives ofQ(α|α(t)) are
[∇Q(α|α(t))]j =
∂Q ∂αj
=X
i
[Ψ(xij +α
(t)
j )−Ψ(mi+|α(t)|)] +nΨ(|α|)−nΨ(αj)
[d2Q(α|α(t))]jj0 = ∂
2Q
∂αjαj0 =nψ(
|α|)−nψ(αj)1{j=j0},
where ψ(z) = Ψ0(z) is the trigamma function. Newton’s method iterates according to
α(m+1) =α(m)−[d2Q(α(m)|α(t))]−1· ∇Q(α(m)|α(t)),
where the subscript m indicates its iteration number. Several issues arise here. First, in
each iteration the Hessian matrix d2Q(α|α(t)) has to be computed and a linear system
needs to be solved. Second, since the Q function is non-concave (note ln Γ is convex),
the Newton’s method may not generate an ascent algorithm. Even when its Hessian is
Lastly the Newton’s updates may violate the parameter constraints αj > 0. At this
point it is realized that the EM principle has not reduced the difficulty of the original
optimization problem and the Newton’s or Fisher’s scoring method could be used directly
on the observed data log-likelihood (2.4). However there is a remedy. Before that we first
explore the MM solution.
2.4
MM Algorithm
Like EM, the MM algorithm is a general principle for creating optimization algorithms.
The survey papers (Lange et al., 2000; Hunter and Lange, 2004) and textbook treatment
(Lange, 2010) serve as an excellent introduction. The derivation in this section also
appears in (Zhou and Lange, 2010) as a special case. Letf(θ) be the objective function, not necessarily a log-likelihood, whose maximum we seek. An MM algorithm involves
minorizing f(θ) at current iterate θ(t) by a surrogate function g(θ | θ(t)) that satisfies
two properties
f(θ) ≥ g(θ|θ(t)), θ 6=θ(t) (2.7)
f(θ(t)) = g(θ(t) |θ(t)). (2.8)
In other words, the surfaceθ7→g(θ |θ(t)) lies below the surfaceθ 7→f(θ) and is tangent to it at the current iteration θ = θ(t). The construction of the minorizing function
g(θ | θ(t)) constitutes the first M of the MM algorithm. The second M of the MM
algorithm maximizes the surrogate g(θ|θ(t)) rather than f(θ) directly. If θ(t+1) denotes
It follows directly from the inequalities
f(θ(t+1)) ≥ g(θ(t+1) |θ(t)) ≥ g(θ(t) |θ(t)) = f(θ(t)).
This ascent property is the source of the MM algorithm’s numerical stability and remains
valid if we merely increase g(θ|θ(t)) rather than maximize it.
The fundamental inequality (2.5) in the EM algorithm shows that the Q function
produced in the E step constitutes a minorizing function of the log-likelihood up to an
additive constant. This fact readily qualifies EM algorithm as a special case of the MM
algorithm. The MM perspective is more general as it frees algorithm derivation from
the missing data straitjacket and invites wider applications. Wu and Lange (2010) briefly
summarize the history of the MM algorithm and showcase its flexibility in some problems
in which the EM derivation is hard to carry out.
To construct an MM algorithm for maximizing the Dirichlet-multinomial log-likelihood
function (2.4), the strategy is to minorize term by term. We first simplify the two sums
n X
i=1
d X
j=1
xij−1
X k=0
ln(αj+k) = n X
i=1
d X
j=1
maxixij−1
X k=0
ln(αj +k)1{xij−1≥k}
=
d X
j=1
maxixij−1
X k=0
ln(αj +k) n X
i=1
1{k≤xij−1} =
d X
j=1
maxixij−1
X k=0
sjkln(αj+k)
and
−
n
X
i=1
mi−1 X
k=0
ln(|α|+k) =−
mi−1 X
k=0
ln(|α|+k)
n
X
i=1
1{k≤mi−1}
=−
maximi−1 X
k=0
where
sjk = n X
i=1
1{xij≥k+1}, rk =
n X
i=1
1mi≥k+1
are counts. Applying the Jensen’s inequality to the ln(αj +k) terms
ln(αj+k)≥
α(jt) α(jt)+k
ln α
(t)
j +k
α(jt) ·αj
!
+ k
α(jt)+k
ln α
(t)
j +k
k ·k
!
= α
(t)
j
α(jt)+k
lnαj+c(t) (2.9)
and the supporting hyperplane inequality to the −ln(|α|+k) terms
−ln(|α|+k)≥ −|α| − |α
(t)|
|α(t)|+k −ln(|α
(t)|+k)
=− |α|
|α(t)|+k+c
(t) (2.10)
yields the surrogate function
g(α|α(t)) = −X
k
rk
|α(t)|+k|α|+
X j
X k
sjkα
(t)
j
α(jt)+k
lnαj +c(t).
Figure 2.2 depicts the two minorization inequalities (2.9) and (2.10) withα(t)= 2 andk=
1. In both minorizations, the equality holds at α=α(t). Finding theα that maximizes
g(α|α(t)) is trivial and leads to the multiplicative MM updates
α(jt+1)=α(jt)
P k
sjk
α(jt)+k P
k rk |α(t)|+k
, j = 1, . . . , d, (2.11)
0 1 2 3 4 5 −1
−0.5 0 0.5 1 1.5 2
f(α(t) )=g(α(t)
|α(t) )=ln(3)
α
f(α)=ln(α+1) g(α|α(t)),α(t)=2
0 1 2 3 4 5
−2.5 −2 −1.5 −1 −0.5 0
f(α(t))=g(α(t)|α(t))=−ln(3)
α
f(α)=−ln(α+1) g(α|α(t)),α(t)=2
Figure 2.2: Graphs of minorization inequalities (2.9) and (2.10).
parameter constraints αj > 0 are always satisfied whenever α
(0)
j > 0. Besides offering a
completely different algorithm from EM, MM principle also suggests a remedy for the
troublesome M step in the EM algorithm.
2.5
An EM-MM Hybrid Algorithm
Due to the fact that the ln Γ(x) function is convex, we can resort to the supporting
hyperplane inequality to separate the parameters in the ln Γ(|α|) term in the Qfunction (2.6)
Q(α|α(t))
≥ X
i
ln
mi
xi
+X
i
X
j
(xij+αj−1)
h
Ψ(xij +α(jt))−Ψ(mi+|α(t)|)
i
+nΨ(|α(t)|)(|α| − |α(t)|) +nln Γ(|α(t)|)−nX
j
ln Γ(αj) +c(t)
= X
j
(
αj
X
i
h
Ψ(xij+α(jt))−Ψ(mi+|α(t)|) + Ψ(|α(t)|)
i
−nln Γ(αj)
)
In this new minorizing function (2.12), the parameters αj are separated and only need
to be optimized independently. Equating the partial derivatives with respect to αj to 0
gives the function to solve for αj
X i
Ψ(xij +α
(t)
j )−nΨ(αj) = X
i
Ψ(mi+|α(t)|)−nΨ(|α(t)|).
In view of the recurrence relation Ψ(y+ 1) = Ψ(y) + 1/y, this is equivalent to
Ψ(α(jt))−Ψ(αj) =
1
n
n X
i=1
mi−1
X k=0
1
|α(t)|+k −
1
n
n X
i=1
xij−1
X k=0
1
αj(t)+k
= 1
n
maximi−1
X k=0
rk
|α(t)|+k −
1
n
maxixij−1
X k=0
sjk
α(jt)+k .
It is interesting to note that the two sums on the right hand side were used in the MM
updates (2.11) in a completely different way. Here we can find the root of Ψ(αj) =a by
Newton’s iterates
α(m+1) =α(m)−
Ψ(α(m))−a
ψ(α(m))
.
Since ln Γ is convex, the trigamma function ψ is positive and the Newton’s method is
guaranteed to converge to the right root. The Newton’s method applied to individual
αj is substantially simpler than the multivariate Newton’s method in the original EM
algorithm, which involves computing and inverting Hessian matrix in each iteration. As
0 50 100 150 −880
−870 −860 −850 −840 −830 −820 −810 −800 −790 −780 −770
Iteration
logL
EM Hybrid MM
0 50 100 150
−880 −870 −860 −850 −840 −830 −820 −810 −800 −790 −780 −770
Iteration
logL
EM Hybrid MM
Figure 2.3: Algorithmic iterates for the HS76-1 data set. Left: Start from a blind guess
α(0) = (1,1). Right: Start from the method of moment estimate α(0) = (0.4711,4.8072).
2.6
Convergence Rates
The EM, MM, and hybrid algorithms constructed so far enjoy the same ascent property,
yet with distinct per iteration computational cost. A formal comparison entails a close
study of their local convergence rates, which roughly measure how fast they converge near
the optimal point. Figure 2.3 displays the iterates of the three algorithms for the HS76-1
data set with two different starting points. When starting from a blind guessα(0) = (1,1),
the EM algorithm converges quickly within 20 iterations, while the other two lag behind.
The hybrid algorithm outruns MM initially but is caught up when close to the optimal
point. When starting from the method of moment estimate α(0) = (0.4711,4.8072), EM behaves similarly while the MM algorithm narrowly edges out the hybrid algorithm.
Because all three algorithms can be deemed as special cases of the MM principle, their
convergence properties can be studied under a unified framework. Consider an MM map
When close to the optimal point θ∞,
θ(t+1)−θ∞≈dM(θ∞)·(θ(t)−θ∞),
where dM(θ∞) is the differential of the mapping M at the optimal point θ∞ of f(θ). Figure 2.4 displays the distance of the algorithmic iterates to the MLE for the HS76-1
example on the logarithmic scale and shows the linear convergence behavior when close
to θ∞. Therefore the local convergence rate of the sequence θ(t+1) =M(θ(t)) is defined
as the spectral radius of dM(θ∞). The familiar calculations (McLachlan and Krishnan, 2008; Lange, 2010) demonstrate that
dM(θ∞) = I−[d2g(θ∞|θ∞)]−1d2f(θ∞). (2.13)
In other words, the local convergence rate is determined by how well the surrogate
func-tion g approximates the log-likelihood surface f near the optimal pointθ∞. In EM liter-ature, dM(θ∞) is called the rate matrix (Meng and Rubin, 1991). A smaller rate means that the surrogate functiong(θ|θ∞) hugsf(θ) tighter aroundθ∞and thus implies faster convergence.
In our case, the Q function of the EM algorithm by construction dominates the
minorizing function (2.12) of the hybrid algorithm. This implies the faster convergence of
the EM algorithm than the hybrid algorithm as observed in Figure 2.3. However, there is
no dominance relations between them and the MM surrogate function. Figure 2.5 displays
the log-likelihood surface of the HS76-1 data set and the minorizing functions of the three
algorithms at the parameter point (α1, α2) = (0.5,5). All three minorizing functions lie
0 100 200 300 400 500 10−5
10−4 10−3 10−2 10−1 100 101
Iteration
||
θ
(t)−
θ
*||
EM Hybrid MM
Figure 2.4: Distance of algorithmic iterates to the final solution kθ(t) −θ∞k2 for the
HS76-1 data set.
of the EM algorithm approximates the log-likelihood function better than the minorizing
function of the hybrid algorithm over the whole region. The MM minorizing function
intersects with the other two besides the point (0.5,5).
Given a data set, the local convergence rates of the three algorithms can be calculated.
Letα∞ be the MLE and define constants
a =
maximi−1
X k=0
rk
(|α∞|+k)2
bj =
maxixij−1
X k=0
sjk
(α∞j +k)2, j = 1, . . . , d
cj =
maxixij−1
X k=0
sjk
α∞j (αj∞+k), j = 1, . . . , d
dj =nψ(α∞j ) =
∞
X k=0
n
(αj∞+k)2, j = 1, . . . , d
e =n−1[ψ(|α∞|)−1−X
j
Figure 2.5: Log-likelihood surface and the minorizing functions of EM, MM, and the EM-MM hybrid algorithms at point (0.5,5) for the HS76-1 data set.
and three polynomials
PMM(λ) =
d Y j=1
(λ−bjc−j1) +a d X
j=1
c−j1 Y
j06=j
(λ−bj0c−1
j0 )
Phybrid(λ) =
d Y j=1
(λ−bjd−j1) +a d X
j=1
d−j1Y
j06=j
(λ−bj0d−1
j0 ) (2.14)
PEM(λ) =
d Y j=1
(λ−bjd−j1)− X
j
(bjd−j1e−ae X
j00
d−j001−a)d
−1
j Y j06=j
(λ−bj0d−1
j0 ).
All roots of these polynomials are real and especially the smallest roots give the
informa-tion about the local convergence rates of the algorithms. Formally we have the following
result.