TRAFFIC SIGN RECOGNITION USING VISUAL ATTRIBUTE LEARNING
AND CONVOLUTIONAL NEURAL NETWORK
RONG-QIANG QIAN1, YONG YUE1, FRANS COENEN2, BAI-LING ZHANG1
1Department of Computer Science and Software Engineering, Xi’an Jiaotong-Liverpool University, Suzhou, 215123, P.R.China. 2Department of Computer Science, University of Liverpool, Liverpool L69 3BX, United Kingdom
E-MAIL: [email protected]
Abstract:
The problem of extracting high level information from dig-ital images and videos is frequently faced in the area of com-puter vision and machine learning. For the recognition of traf-fic signs, a lot of outstanding methods have been proposed, and deep models demonstrates their powerful representation capac-ity, achieved dominant performances. In this paper a method for recognizing traffic signs is proposed founded on a novel visual attribute mechanisms; whereby attributes are generat-ed using Convolutional Neural Networks (CNN). In compari-son with previous methods founded on the use of CNN for fea-ture extractor and Multi-Layer Perception (MLP) as classifier, the Max Pooling Positions (MPPs) proposed in this paper pre-dict visual attributes that provide a useful linkage between low-level features and high-low-level sematic tasks. The results show that outstanding performances can be achieved using MPPs. Keywords:
Advanced Driver Assistance; Traffic sign recognition; Deep learning; Convolutional neural networks; Max pooling; Visual at-tributes
1.
Introduction
Traffic Sign Recognition (TSR) using computer vision and machine learning technology is a key component with respect to many applications, such as self-driving, driverless vehicles, traffic mapping and traffic surveillance. Recognition of traffic signs allows a driver to be warned of inappropriate actions and potential dangers. The dataset German Traffic Sign Recogni-tion Benchmark (GTSRB) [1] provides a number of difficult challenges due to ”open-set problems” such as viewpoint vari-ations, poor illumination conditions, motion-blur, occlusion-s, colors fading, and low resolutions. As a consequence, the
recognition of traffic signs has been significantly developed, and a number of outstanding approaches have been reported in the literatures [2, 3, 4].
Due to the huge success achieved by the large Convolution-al NeurConvolution-al Networks (CNN) [5] proposed for image-level object recognition on the ImageNet challenge [6]. Deep learning has attracted much attention in computer vision research as more and more promising results are published on a range of differ-ent vision tasks. It has been demonstrated that CNN are able to automatically learn and extract the optimized features that rich-ly describe image content as well as allowing for discrimination between object categories. Although excellent performance has been achieved by CNN, exploring, understanding and interpret-ing the internal workinterpret-ing principles of CNN remains an open problem. Some pioneering works have been conducted; for examples in [7, 8] have shown that features extracted from a pre-trained CNN model using ImageNet have the potential for application to other computer vision tasks, including object de-tection, fine-grained recognition and action recognition.
Recently activation schemes [9, 10, 11, 12] have present a mechanism for investigating and understanding CNN model-s. For example, in fine-grained recognition tasks, the required part detectors can be discovered by analyzing the gradient maps of the network outputs and finding activation centers spatially related to annotated semantic parts or bounding boxes. More-over, the relationship between visual attributes and convolu-tional networks is discussed in [13], Attribute Centric Nodes (ACNs) are selected and used for predicting visual attributes.
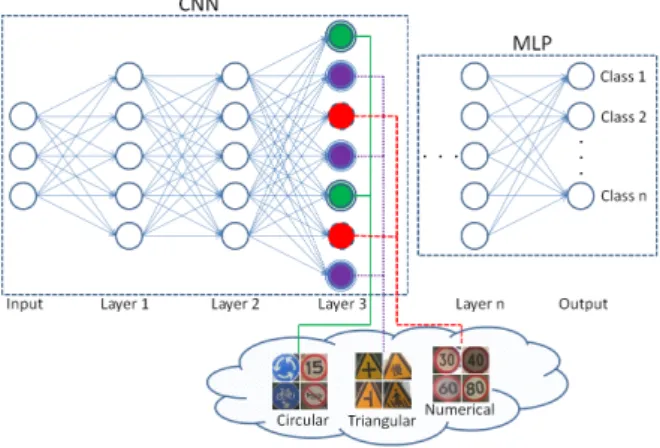
Inspired by previous researches that aims at visualizing and activating CNNs for performing particular tasks, the work p-resented in this paper focus on exploring the relationships be-tween visual attributes and CNN using Max Pooling Positions (MPPs), as illustrated in Fig. 1. Instead of directly using fea-tures extracted from CNN for training classifies, which is
com-FIGURE 1.Based on a pre-trained CNN network, visual attributes seem to be encoded by the network’s activations. This work focuses on finding the exact activation locations for each specific visual attributes.
mon to all of the CNN models, we use MPPs to sample and encode the features; the encoded pooling sequence will then be used to predict visual attributes. The main contributions of our proposed system are:
- A CNN model to learn a compact yet discriminative fea-ture representation.
- A novel method to discover the relationship between visu-al attributes and CNN based on MPPs.
The rest of this paper is organized as follows: Section 2 out-lines some related research on traffic sign recognition, visual attributes and CNN applications; Section 3 provides a detailed description of the proposed system; Implementation details and experimental results will be provided in Section 4, followed by conclusion in Section 5.
2.
Related works
2.1.
Traffic sign recognition
TSR has been an active area of research in the computer vi-sion community for many years. The common approaches for TSR using classification can be divided into two groups: (i) multi-class classification whereby traffic signs are classified ac-cording to a set of class labels (more than two) and (ii) binary-classification where traffic signs are classified in terms of a t-wo class problem. Among the many classification (prediction) models, Support Vector Machines (SVMs) have provided good
performance [14, 15]. A robust sign similarity measurement us-ing SimBoost and fuzzy regression tree was proposed in [16]. An ensemble of classifiers, based on the Error-Correcting Out-put Code (ECOC) framework, was introduced in [17], where the ECOC framework was designed using a forest of optimal tree structures that are embedded in the ECOC matrix. Due to the powerful representational learning capabilities of CNN, C-NN models have become the dominant approaches for traffic sign recognition in recent years. For example, committee CNN [3], multi scale CNN [4], multi column CNN [18] and hinge-loss CNN [19].
2.2.
Visual attributes
The works presented in [20, 21] expounded the advantages of using visual attributes in various vision tasks, and visual recog-nition in particular. Visual attributes are human-nameable se-matic properties shared by objects, which provide a useful link-age between low-level features and high-level categorical label-s. The attributes of interest can be categorised into two types: (i) visual attributes and (ii) data driven attributes. The first are defined by humans and tend to be represented by words which have a clear sematic meaning. The second are discovered from the data. In recent years, studies directed at attribute-based rep-resentations have drawn a lot of attention, with representational works including Zero-Shot Learning (ZSL) [22], action recog-nition [23], and scenes representation [24, 25].
2.3.
Convolutional neural network
A CNN is a special type of multi-layer neural network that extracts features by combining convolution, pooling and ac-tivation layers. The most successful CNN architecture [5] is trained usin back-propagation; excellent performance has been achieved using benchmark data sets. Although CNN models have been proven to have powerful description capabilities, it remains unclear how features are learned inside the network. This lack of understanding of the internal operation of CNNs has attracted significant research interest directed at a desired to seek deeper insight into its working principle. For example, Part Detector Discovery (PDD) has been proposed based on analyzing the gradient maps of the network outputs and finding activation centers [9]. An unsupervised fine-grained recogni-tion scheme was introduced in [10] whereby part models were generated by finding constellations of neural activation pattern-s. In [11], the visualisation of image classification models were displayed based on computing the gradient of the class score with respect to the input image. Motivated by the wish to vi-sualize and understand CNNs, the work presented in [12]
pro-posed a novel scheme to visualize activations based on a multi-layered Deconvolutional Network (deconvnet). The relation-ship between visual attributes and convolutional networks is discussed in [13], where Attribute Centric Nodes (ACNs) are used for predicting visual attributes.
3.
Approach
An overview of the proposed recognition system is shown in Fig. 2. In the pre-processing stage, the input image will be normalized by using Contrast-Limited Adaptive Histogram E-qualization (CLAHE) [26]. Then, the normalized image will be passed to a CNN model for extracting discriminative features. Finally, MPPS is adopted to predict each visual attributes of the input image.
FIGURE 2.System overview
3.1.
Network architecture
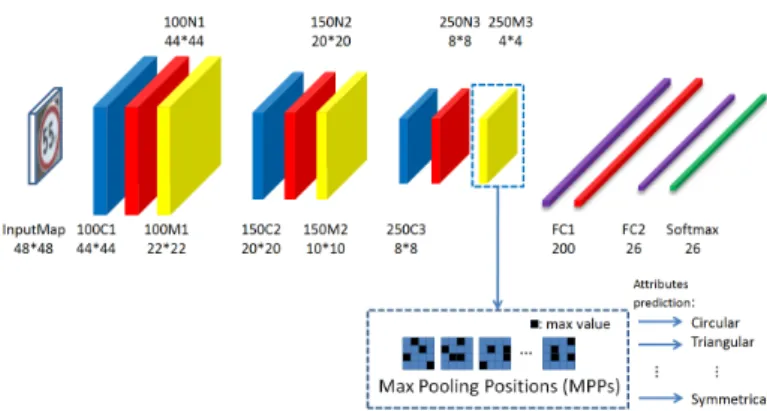
The basic network structure of our proposed model is similar to the work in [3], which can be illustrated as shown in Fig. 3. In the training stage, the network consists of three convolution stages followed by fully connection layers and softmax layer. Each convolution stage includes convolutional layer, non-linear activation layer and max pooling layer. ReLU [5] is employed as the activation function for the convolutional layers and the full connection layers. The final softmax layer has 26 outputs, corresponding to each category in our traffic sign dataset. On the other hand, in the testing stage, the original full connec-tion layers and softmax layer are replaced with several visual attribute classifiers. Each of the classifiers implements a two-class two-classification. Instead of training all the two-classifiers using standard back-propagation, all the parameters are simply se-lected and fine-tuned by our MPPs method. The details will be elaborated on in the next section.
3.2.
Visual attributes prediction by max pooling
posi-tions
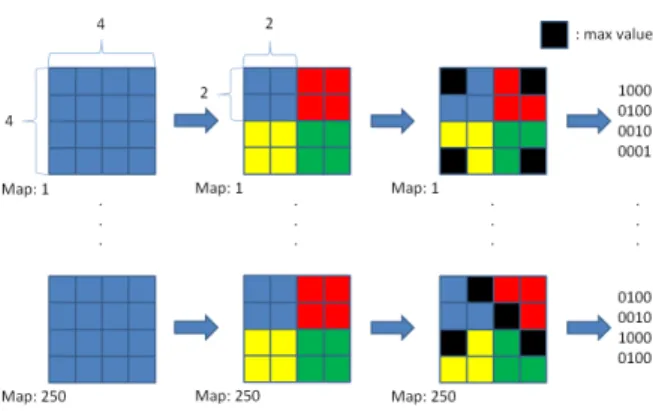
Since the final layer of the proposed CNN has 250 feature maps with 4×4 neurons, the extracted features have a dimen-sion of 4000. As Fig. 4 demonstrates, for each 4×4 feature
FIGURE 3.Network architecture
map, max pooling with a kernel size 2×2 and stride of 2 is performed, with the position of each max value being recorded. Then, each recorded position is encoded into a four bits binary value. Finally, the whole MPPs sequence can be obtained by concatenating all the binary values. The dimension of MPPs sequence is also 4000.
For each visual attribute classifier, the training stage can be described as follows.
Step 1. Data collection. All the available data is divided into two class based on existence of current visual attributes.
Step 2. Data processing. In order to measure the similarities of MPPs belonging to the same class, all of the MPPs sequences from same class are accumulated together and normalized by dividing by the number of samples. In this manner we get a series of sequences that indicate the probability of appearance for each of the max value positions. Therefore, two probability sequences are achieved, namely,ppositiveandpnegative.
Step 3. Activation selection. The purpose of this step is to s-elect a decision matrix for each visual attribute classifier with a dimension of 2×4000. The corresponding decision matrix d(x, y)can be computed by comparing the magnitude of the probability of each channel inppositiveandpnegative; a chan-nel is activated according to the larger probability, the activa-tion value for the selected channel is set to be|ppositive(y)− pnegative(y)|and that for the other channel to 0.
Step 4. Fine-tuning. The obtained decision matrix d(x, y)
needs further tuning. For each iteration, if the current predict-ed label is wrong, the corresponding decision matrix is fine-tuned by adding the product of the current MPPs sequence and a learning rate. The decision matrix is normalized after each iteration. Normally, the tuning requires only a few iterations.
FIGURE 4.Classification by max pooling positions (MPPs)
4.
Experiment
In this section, we will introduce the implementation details of our CNN model, including architecture selection and train-ing. The proposed MPPs based visual attribute recognition method will then be discussed. Finally, performance compari-son will be provided. To evaluate the performance of our traffic sign recognition system, a computer with Xeon 3.3GHz CPU and 24GB memory was employed. To accelerate the training, a very efficient Titan GPU based implementation was built us-ing NVIDIA CUDA and CUDNNv3. The details will be intro-duced with the corresponding experiments in the following.
4.1.
Implementation details
The basic network structure of our proposed model is similar to that described in [3]. However, instead of using hyperbolic tangent as the activation function, ReLU [5] is employed.
4.2.
Pre-training by GTSRB dataset
The pre-training scheme for our system is as follows: (i) 43 categories of training data were acquired and pre-processed from the GTSRB [1]; (ii) initial weights of the convolution lay-ers and full connection laylay-ers were allocated using a uniform random distribution in the range [-0.05, 0.05]; (iii) the learning rate was set to 0.001 and the training will be terminated after 200 epochs ;(iv) cross-entropy loss and stochastic gradient de-scent [5] were used during training.
4.3.
Fine-tuning by self-captured dataset
The fine-tuning was continued with our traffic sign dataset, which contains 13340 traffic signs that incorporated 26 class-es,70% of the images were used for training and the rest for testing. The adopted fine-tuning scheme was as follows: (i) all of the CNN parameters were kept unchanged except that the final 43-way classification layer was replaced with a randomly initialized 26-way classification layer; (ii) the learning rate was set to 0.001; (iii) training was conducted using cross-entropy loss and stochastic gradient descent.
4.4.
Traffic sign recognition by visual attributes
The visual attributes adopted with resect to the reported ex-perimentation are listed in Table 1. From the table it can be seem that 11 visual attributes were identified based on the shapes, colors and content of the traffic signs. The corre-sponding prediction accuracy of each attribute is given in the rightmost column of Table 1. Since visual-level attributes are not sufficient for classifying all the traffic signs, we also use category-level attributes. The recognition process was as fol-lows: (i) giving an input image, the visual-level attributes are labeled; (ii) compare the predicted labels with the attributes ta-ble, and choose the nearest category; (iii) checking whether category-level attributes are needed. The recognition rate is about94.63% based on the training network. By introducing the proposed recognition scheme, the overall accuracy rate is about95.53%, an encouraging result. Some of the unsuccess-ful examples are given in Fig. 5. The main possible reasons for the failed recognition include: (i) motion-blur; (ii) poor illumi-nation; (iii) disadvantageous viewpoint variations.
FIGURE 5.Example images where the recognition failed.
5.
Conclusion
In this paper, a novel visual attribute based traffic sign recog-nition system is proposed. The main contributions of the work include: (i) a CNN model to learn a compact yet discriminative feature representation; (ii) a novel method to discover the rela-tionship between visual attributes and convolutional networks based on MPPs. By introducing visual attributes for recogni-tion, excellent prediction performance was achieved.
References
[1] J. Stallkamp, M. Schlipsing, J. Salmen, C. Igel, Man vs. computer: Benchmarking machine learning algo-rithms for traffic sign recognition, Neural Networks 32 (2012) 323 – 332, selected Papers from{IJCNN}2011. doi:http://dx.doi.org/10.1016/j.neunet.2012.02.016. [2] M. Mathias, R. Timofte, R. Benenson, L. Van Gool,
Traffic sign recognition - how far are we from the solution?, in: Neural Networks (IJCNN), The 2013 International Joint Conference on, 2013, pp. 1–8. doi:10.1109/IJCNN.2013.6707049.
[3] D. Ciresan, U. Meier, J. Masci, J. Schmidhuber, A committee of neural networks for traffic sign classifi-cation, in: Neural Networks (IJCNN), The 2011 In-ternational Joint Conference on, 2011, pp. 1918–1921. doi:10.1109/IJCNN.2011.6033458.
[4] P. Sermanet, Y. LeCun, Traffic sign recogni-tion with multi-scale convolutional networks, in: Neural Networks (IJCNN), The 2011 Interna-tional Joint Conference on, 2011, pp. 2809–2813. doi:10.1109/IJCNN.2011.6033589.
[5] A. Krizhevsky, I. Sutskever, G. E. Hinton, Imagenet clas-sification with deep convolutional neural networks, in: F. Pereira, C. Burges, L. Bottou, K. Weinberger (Eds.),
Advances in Neural Information Processing Systems 25, Curran Associates, Inc., 2012, pp. 1097–1105.
[6] J. Deng, W. Dong, R. Socher, L.-J. Li, K. Li, L. Fei-Fei, Imagenet: A large-scale hierarchical image database, in: Computer Vision and Pattern Recognition, 2009. CVPR 2009. IEEE Conference on, 2009, pp. 248–255. doi:10.1109/CVPR.2009.5206848.
[7] A. Razavian, H. Azizpour, J. Sullivan, S. Carlsson, Cnn features off-the-shelf: An astounding baseline for recog-nition, in: Computer Vision and Pattern Recognition Workshops (CVPRW), 2014 IEEE Conference on, 2014, pp. 512–519. doi:10.1109/CVPRW.2014.131.
[8] J. Donahue, Y. Jia, O. Vinyals, J. Hoffman, N. Zhang, E. Tzeng, T. Darrell, Decaf: A deep convolutional ac-tivation feature for generic visual recognition, in: Pro-ceedings of the 31th International Conference on Machine Learning, ICML 2014, Beijing, China, 21-26 June 2014, 2014, pp. 647–655.
[9] M. Simon, , E. Rodner, , J. Denzler, Computer Vision – ACCV 2014: 12th Asian Conference on Computer Vi-sion, Singapore, Singapore, November 1-5, 2014, Revised Selected Papers, Part II, Springer International Publish-ing, Cham, 2015, Ch. Part Detector Discovery in Deep Convolutional Neural Networks, pp. 162–177.
[10] M. Simon, E. Rodner, Neural activation constellation-s: Unsupervised part model discovery with convolutional networks, in: International Conference on Computer Vi-sion (ICCV), 2015.
[11] K. Simonyan, A. Vedaldi, A. Zisserman, Deep inside convolutional networks: Visualising image classification models and saliency maps, CoRR abs/1312.6034. [12] M. D. Zeiler, R. Fergus, Computer Vision – ECCV 2014:
13th European Conference, Zurich, Switzerland, Septem-ber 6-12, 2014, Proceedings, Part I, Springer Internation-al Publishing, Cham, 2014, Ch. VisuInternation-alizing and Under-standing Convolutional Networks, pp. 818–833.
[13] V. Escorcia, J. Niebles, B. Ghanem, On the relation-ship between visual attributes and convolutional net-works, in: Computer Vision and Pattern Recognition (CVPR), 2015 IEEE Conference on, 2015, pp. 1256– 1264. doi:10.1109/CVPR.2015.7298730.
[14] S. Maldonado-Bascon, S. Lafuente-Arroyo, P. Gil-Jimenez, H. Gomez-Moreno, F. Lopez-Ferreras, Road-sign detection and recognition based on support
vector machines, Intelligent Transportation System-s, IEEE Transactions on 8 (2) (2007) 264–278. doi:10.1109/TITS.2007.895311.
[15] M. Shi, H. Wu, H. Fleyeh, Support vector machines for traffic signs recognition, in: Neural Networks, 2008. IJC-NN 2008. (IEEE World Congress on Computational Intel-ligence). IEEE International Joint Conference on, 2008, pp. 3820–3827. doi:10.1109/IJCNN.2008.4634347. [16] A. Ruta, Y. Li, X. Liu, Robust class similarity
mea-sure for traffic sign recognition, Intelligent Transportation Systems, IEEE Transactions on 11 (4) (2010) 846–855. doi:10.1109/TITS.2010.2051427.
[17] X. Baro, S. Escalera, J. Vitria, O. Pujol, P. Radeva, Traf-fic sign recognition using evolutionary adaboost detection and forest-ecoc classification, Intelligent Transportation Systems, IEEE Transactions on 10 (1) (2009) 113–126. doi:10.1109/TITS.2008.2011702.
[18] D. Ciresan, U. Meier, J. Masci, J. Schmidhu-ber, Multi-column deep neural network for traf-fic sign classitraf-fication, Neural Networks 32 (2012) 333 – 338, selected Papers from {IJCNN} 2011. doi:http://dx.doi.org/10.1016/j.neunet.2012.02.023. [19] J. Jin, K. Fu, C. Zhang, Traffic sign recognition with
hinge loss trained convolutional neural networks, Intelli-gent Transportation Systems, IEEE Transactions on 15 (5) (2014) 1991–2000. doi:10.1109/TITS.2014.2308281. [20] C. Lampert, H. Nickisch, S. Harmeling, Learning to
detect unseen object classes by between-class attribute transfer, in: Computer Vision and Pattern Recognition, 2009. CVPR 2009. IEEE Conference on, 2009, pp. 951– 958. doi:10.1109/CVPR.2009.5206594.
[21] A. Farhadi, I. Endres, D. Hoiem, D. Forsyth, De-scribing objects by their attributes, in: Comput-er Vision and PattComput-ern Recognition, 2009. CVPR 2009. IEEE Conference on, 2009, pp. 1778–1785. doi:10.1109/CVPR.2009.5206772.
[22] S. Antol, C. L. Zitnick, D. Parikh, Computer Vision – ECCV 2014: 13th European Conference, Zurich, Switzerland, September 6-12, 2014, Proceedings, Part IV, Springer International Publishing, Cham, 2014, Ch. Zero-Shot Learning via Visual Abstraction, pp. 401–416. [23] Y. Fu, T. M. Hospedales, T. Xiang, S. Gong,
Comput-er Vision – ECCV 2012: 12th European ConfComput-erence on
Computer Vision, Florence, Italy, October 7-13, 2012, Proceedings, Part IV, Springer Berlin Heidelberg, Berlin, Heidelberg, 2012, Ch. Attribute Learning for Understand-ing Unstructured Social Activity, pp. 530–543.
[24] G. Patterson, J. Hays, Sun attribute database: Dis-covering, annotating, and recognizing scene attributes, in: Computer Vision and Pattern Recognition (CVPR), 2012 IEEE Conference on, 2012, pp. 2751–2758. doi:10.1109/CVPR.2012.6247998.
[25] J. Shao, K. Kang, C. C. Loy, X. Wang, Deeply learned attributes for crowded scene understanding, in: Computer Vision and Pattern Recognition (CVPR), 2015 IEEE Conference on, 2015, pp. 4657–4666. doi:10.1109/CVPR.2015.7299097.
[26] K. Zuiderveld, Contrast limited adaptive histogram equal-ization, in: Graphics gems IV. Academic Press Profes-sional, 1994, pp. pp. 474–485.