Implementation of Artificial Neural
Network applied for the solution of inverse
kinematics of 2-link serial chain
manipulator.
Satish Kumar1*, Kashif Irshad2
1*
Department of Mechanical Engineering IILM, Greater Noida INDIA
2
Department of Mechanical Engineering, Aligarh Muslim University, INDIA
*
Corresponding Author: e-mail: [email protected] Tel +91-8287823829,9555597343
Abstract
In this study, a method of artificial neural network applied for the solution of inverse kinematics of 2-link serial chain manipulator. The method is multilayer perceptrons neural network has applied. This unsupervised method learns the functional relationship between input (Cartesian) space and output (joint) space based on a localized adaptation of the mapping, by using the manipulator itself under joint control and adapting the solution based on a comparison between the resulting locations of the manipulator's end effectors in Cartesian space with the desired location. Even when a manipulator is not available; the approach is still valid if the forward kinematic equations are used as a model of the manipulator. The forward kinematic equations always have a unique solution, and the resulting Neural net can be used as a starting point for further refinement when the manipulator does become available. Artificial neural network especially MLP are used to learn the forward and the inverse kinematic equations of two degrees freedom robot arm.
A set of some data sets were first generated as per the formula equation for this the input parameter X and Y coordinates in inches. Using these data sets was basis for the training and evaluation or testing the MLP model. Out of the sets data points, maximum were used as training data and some were used for testing for MLP. Back-propagation algorithm was used for training the network and for updating the desired weights. In this work epoch based training method was applied.
Keywords: ANN, MLP, Robot Manipulator, Inverse Kinematics
1. INTRODUCTION
The term robot has been applied to a wide variety of mechanical devices, from children's toys to guided missiles. An important class of robots is the manipulator arms, such as the PUMA robot. These manipulators are used primarily in materials handling, welding, assembly, spray painting, grinding, deburring etc.
The robot manipulator is created from a sequence of link and joint combinations. The links are the rigid members connecting the joints, or axes. The axes are the movable components of the robot that cause relative motion between adjoining links. The mechanical joints used to construct the manipulator consist of five principal types. Two of the joints are linear, in which the relative motion between adjacent links is non-rotational, and three are rotary types, in which the relative motion involves rotation between links.
The different techniques used for solving inverse kinematics can be classified as algebraic [Alavandar S. and Nigam M. J. 2008], geometric [Morris A. S. And A. Mansor; 1997] and iterative [Ahmad Z. and Guez; 1990]. [Karliket al. 1999]developed an improved approach to the solution of inverse kinematics problems for robot manipulators. A structured artificial neural-network (ANN) approach has been proposed here to control the motion of a robot manipulator. Work has been undertaken to find the best ANN configurations for this problem. Both the placement and orientation angles of a robot manipulator are used to fin the inverse kinematics solutions.
[Xia and Wang; 2001 ] developed a Dual Neural Network for Kinematic control of Redundant Robot Manipulators the inverse kinematics problem in robotics can be formulated as a time-varying quadratic optimization problem. The proposed dual network is also shown to be capable of asymptotic tracking for the motion control of kinematic ally redundant manipulator.
[Patino et al. 2002] demonstrate neural networks for advanced control of robot manipulators. Presents an approach and a systematic design methodology to adaptive motion control based on neural networks (NNs) for high-performance robot manipulators, for which stability conditions and performance evaluation are given. Simulation results showing the practical feasibility and performance of the proposed approach to robotics are given.
[Mayorga and Pronnapa Sanongboon;2002]developed Inverse kinematics and geometrically bounded singularities prevention of redundant manipulators an Artificial Neural Network approach. This article presents an Artificial Neural Network (ANN) approach for fast inverse kinematics computation and effective geometrically bounded singularities prevention of redundant manipulators.
[Manocha and Canny; 2007 ] presented an algorithm and implementation for efficient inverse kinematics for a general 6R manipulator. When stated mathematically, the problem reduces to solving a system of multivariate equations. They make use of the algebraic properties of the system and the symbolic formulation used for reducing the problem to solving univariate polynomial. However, the polynomial is expressed as a matrix determinant and its roots are computed by reducing to an eigen value problem.
[Alavandar and Nigam; 2008] developed Neuro-Fuzzy based approach for Inverse Kinematics Solution of Industrial Robot Manipulators. In this paper, using the ability of ANFIS (Adaptive Neuro-Fuzzy inference System) to learn from training data, it is possible to create ANFIS, an implementation of a representative fuzzy inference system using a BP neural network-like structure, with limited mathematical representation of the system. Computer simulations conducted on 2 DOF and 3DOF robot manipulator shows the effectiveness of the approach.
[H. Sadjadian and H.D. Taghirad; 2008] developed Neural Networks Approaches for Computing the Forward Kinematics of a Redundant Parallel Manipulator. In this paper, different approaches to solve the forward kinematics of a three DOF actuator redundant hydraulic parallel manipulator are presented. It is concluded that ANFIS presents the best performance compared to MLP, RBF and PNN networks in this particular application. [Gallaf ; 2008 ]developed Neural Networks for Multi-Finger Robot Hand Control. This paper investigates the employment of Artificial Neural Networks (ANN) for a multi-finger robot hand manipulation in which the object motion is defined in task-space with respect to six Cartesian based coordinates. The paper demonstrates the proposed algorithm for a four fingered robot hand, where inverse hand Jacobian plays an important role in robot hand dynamic control.
We used MLP (multiple layer perceptrons) method and comparison with MIMO system which uses a Widrow- Hoff type error correction rule. This unsupervised method learns the functional relationship between input (Cartesian) space and output (joint)space based on a localized adaptation of the mapping, by using the manipulator itself under joint control and adapting the solution based on a comparison between the resulting locations of the manipulator's end effectors in Cartesian space with the desired location. Even when a manipulator is not available; the approach is still valid if the forward kinematic equations are used as a model of the manipulator. The forward kinematic equations always have a unique solution, and the resulting Neural net can be used as a starting point for further refinement when the manipulator does become available. Artificial neural network especially MLP are used to learn the forward and the inverse kinematic equations of two degrees freedom robot arm. The technique is independent of arm configuration, including the number of degrees of freedom and the link geometry.[ Jenhwa Guo and Vladimir Cherkassky; 1999].
1.1 Background
1.2 Objective
The main objective of the report is to find out the solution for inverse kinematics of manipulator with the help of neural network method. Validation of the NN methods ensures future selection of the correct method of NN. From the literature it is well described that there is no unique solution for inverse kinematics. This is why it is significant to apply artificial neural networks models. Here work has been undertaken to find the best ANN configuration for the problem.
1.3 Methodology
On the basis of Literature Survey we have proposed one method for the solution of inverse kinematics of manipulator, the proposed methodis multilayer perceptrons to validate the performance of MLP for inverse kinematics problem, simulation studies will be carried out by using MATLAB [Youshen Xia and Jun Wang 2001]. Many researchers have followed MLP, PPN, RBF and FLANN with MISO (multi input single output) system. Here in this research we have applied MLP with MIMO (multi input multi output) system. A set of some data sets were first generated as per the formula equation for this the input parameter X and Y coordinates in inches. Using these data sets was basis for the training and evaluation or testing the MLP model. Out of the sets data points, maximum were used as training data and some were used for testing for MLP. Back-propagation algorithm was used for training the network and for updating the desired weights. In this work epoch based training method was applied.
1.4 Scope of the Present Work
In this study the MLP has been proposed for the solution of inverse kinematics problem of robot manipulator. However, it has some limitations. There are several types of soft computing methods are available which can be used for finding the solution, but this is beyond the scope of this thesis but this technique can be used for the future scope of the thesis. These methods are followed:
Application of fuzzy inference system (FIS) Functional link artificial neural network (FLANN) Evaluation computation
2. RESULT AND DISCUSSION
To analyse the Manipulator position in joint space and also to validate the performance of MLP for inverse kinematics problem, simulation studies are carried out by using MATLAB.
2.1 Data Generation:
Let us take the 2-dimensional input space with a two-joint robotic arm and given the desired co-ordinate, the problem reduces to finding the two angles involved. Let θ1 be the angle between the first arm and the base. Let
θ2 be the angle between the second arm and the first arm.
Let the length of the first arm be L1= 12 and that of the second arm be L2= 8.Let us assume that the first joint has limited freedom to rotate and it can rotate between 0 and 180 degrees. Similarly assume that the second joint has limited freedom to rotate and can rotate between 0 and 180 degrees.
Hence, 0< =θ1=< pi and 0< =θ2=< pi.
Now for every combination of θ1and θ2 values the X and Y co-ordinates are deduced using Forward kinematics formulae.
X = l1cos θ1+ l2cos(θ1+θ2) (2.1)
Y = l1sin θ1+ l2 sin(θ1+θ2) (2.2)
With the help of MATLAB programming, the data is generated for all combination of θ1 and θ2 values and saved into a matrix to be used as training data. Plotting of points shows all the X-Y data points generated by cycling through different combinations of θ1 and θ2 and deducing x and y co-ordinates for each.
2.2 Calculation of Desired Values of (Θ1& Θ2)
The θ1 and θ2 values are deduced mathematically from the x and y coordinates using inverse kinematics formulae given in 4.10.The MATLAB programming is used to calculate mathematically the desired values of
0 20 40 60 80 100 120 140 160 0.65 0.7 0.75 0.8 0.85
NUMBER OF SAMPLES (INPUTS)
V AL U ES O F D ES IR ED VA L U E S O F T H ET A 1
0 20 40 60 80 100 120 140 160
2.32 2.34 2.36 2.38 2.4 2.42 2.44
NUMBER OF SAMPLES (INPUTS)
VA L U ES O F D ESIR ED VAL U E O F T H E T A 2
Fig-1 Graph shows the desired values of θ1
Fig-2 Graph shows the desired values of θ2
Above Fig 1 and 2 shows the line graph representing all possible values of θ1& θ2 for 160 sample input data points. In the graph it shows that the values are in alternate order it is due to the fact that the each sample is chosen from its higher point to lower point but it is not necessary all time.
2.3 Calculation and Testing to Predict the Values Through Ann
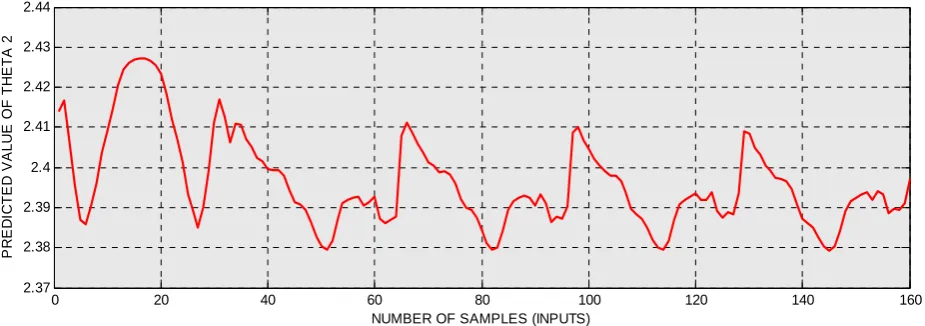
MATLAB programming is used to calculate the predicted values let it is THETA1P & THETA2P. The newff command is used to create the back propagation neural network. In this report the 50 data points are used to create and train the back propagation multilayer neural network in which there are 10 hidden layers. After the training of network the simulation is done by using ‘sim’ command. There are total 160 sample inputs data points are simulate through the network in 8 epochs separately for θ1 and θ2 values. ‘trainsig’ command is used for the sigmoidal transfer function. Other commands are used in default condition as described earlier in previous chapter. 160 sample points are first used to evaluate the values of θ1. After this the same data points are used to evaluate the values of θ2.
Performance of the network and the predicted values of θ1 and θ2by neural network are shown in below Fig- 3 and 4 and Table 1.
0 20 40 60 80 100 120 140 160 2.37
2.38 2.39 2.4 2.41 2.42 2.43 2.44
NUMBER OF SAMPLES (INPUTS)
PR
ED
IC
T
ED
V
AL
U
E O
F
T
H
ET
A 2
Fig-4 Graph shows the Predicted values of θ2
Table 1. Comparison of Desired values and ANN predicted values
S.NO. DESIRED VALUE OF θ1 ANN PREDICTED VALUE OF θ1 DESIRED VALUE OF θ2 ANN PREDICTED VALUE OF θ2
1 0.846585675 0.808673263 2.406270352 2.430646548
2 0.834232113 0.824876339 2.406192714 2.431057806
3 0.82186534 0.839148244 2.405959843 2.430548103
4 0.809489252 0.852528773 2.405571856 2.42525326
5 0.797107829 0.875174309 2.405028954 2.4163884
6 0.78472512 0.92649984 2.404331414 2.4124183
7 0.772345243 0.872208086 2.403479592 2.40898237
8 0.759972367 0.752438434 2.402473921 2.402945497
9 0.747610713 0.714238745 2.401314908 2.397962404
10 0.735264538 0.683660666 2.400003135 2.392771978
11 0.722938129 0.662703074 2.398539255 2.387627089
12 0.710635792 0.64038021 2.396923992 2.384057849
13 0.698361847 0.620972799 2.395158135 2.382364467
14 0.686120613 0.60984029 2.393242541 2.381823383
15 0.673916402 0.604698645 2.391178129 2.381736335
16 0.661753511 0.602885724 2.388965876 2.381748829
17 0.649636211 0.603291253 2.386606818 2.38174338
18 0.637568739 0.606167458 2.384102045 2.381745454
19 0.625555288 0.613220417 2.381452695 2.381946989
20 0.613600004 0.62747883 2.378659958 2.382831026
21 0.601706969 0.649233113 2.375725067 2.385187253
22 0.845300805 0.670286591 2.393701923 2.389486937
23 0.833099024 0.694324039 2.393625344 2.394838325
24 0.820886388 0.72686979 2.393395643 2.399796051
25 0.808666649 0.783833121 2.393012936 2.40530937
26 0.796443632 0.918734542 2.39247741 2.410524339
27 0.784221231 0.906043681 2.39178933 2.413707396
29 0.759794145 0.847255294 2.389956928 2.428302272
30 0.747597514 0.833882915 2.3888135 2.430959343
31 0.735417591 0.818916526 2.387519299 2.43097375
32 0.723258488 0.801447466 2.386074946 2.430232461
33 0.711124335 0.83990566 2.384481129 2.404871163
34 0.699019271 0.834469229 2.382738598 2.403078069
35 0.686947437 0.819641053 2.380848166 2.402466907
36 0.674912965 0.790813032 2.378810708 2.403820667
37 0.662919973 0.772939482 2.376627154 2.40538019
38 0.650972556 0.753103891 2.374298489 2.40483224
39 0.639074774 0.7330505 2.37182575 2.402894812
40 0.627230649 0.733614207 2.369210023 2.400890525
41 0.615444155 0.731228941 2.366452439 2.39761761
42 0.60371921 0.715977128 2.363554174 2.398713533
43 0.844199806 0.700457108 2.381150383 2.400730634
44 0.832146106 0.694027895 2.38107482 2.395232807
45 0.820083764 0.683390025 2.380848166 2.39075224
46 0.808016393 0.670247657 2.380470531 2.389361315
47 0.795947675 0.6605278 2.379942092 2.388902954
48 0.783881355 0.653820838 2.379263101 2.388107008
49 0.771821235 0.647249387 2.378433878 2.385951898
50 0.759771161 0.636769224 2.377454813 2.381703139
51 0.747735022 0.620501494 2.376326364 2.377732515
52 0.735716739 0.618423719 2.375049056 2.380112889
53 0.723720258 0.685739282 2.373623478 2.388047646
54 0.711749541 0.782232059 2.372050283 2.393095553
55 0.699808558 0.791334447 2.370330187 2.394616645
56 0.687901281 0.795880957 2.368463962 2.394339203
57 0.676031675 0.858491118 2.366452439 2.39278124
58 0.664203688 0.886942685 2.364296505 2.389662718
59 0.652421247 0.813601487 2.361997097 2.38742547
60 0.640688249 0.761657084 2.359555203 2.38962238
61 0.629008551 0.742765694 2.356971859 2.39446378
62 0.617385966 0.732380469 2.354248142 2.395931563
63 0.605824257 0.724885847 2.351385174 2.395902272
64 0.843275501 0.71925425 2.368613128 2.395743476
65 0.831366315 0.838434365 2.368538542 2.40420198
66 0.819450568 0.830733583 2.368314818 2.402957465
67 0.807531741 0.810216794 2.367942058 2.403048091
68 0.79561338 0.78233209 2.367420433 2.40494311
69 0.783699089 0.771954346 2.366750181 2.405698926
70 0.771792523 0.748450873 2.365931607 2.404484898
71 0.759897382 0.736032642 2.364965082 2.402468924
73 0.73615635 0.728707101 2.36258998 2.397278411
74 0.724318013 0.70999317 2.361182464 2.400249966
75 0.712506197 0.698760749 2.359629112 2.399183707
76 0.700724713 0.691932261 2.357930605 2.393165896
77 0.688977373 0.679907548 2.356087679 2.390064735
78 0.677267982 0.66761673 2.354101125 2.389191378
79 0.665600331 0.658988352 2.351971786 2.388687151
80 0.653978187 0.652548663 2.349700558 2.387503051
81 0.642405291 0.645253972 2.34728838 2.384661265
82 0.630885348 0.633293996 2.344736239 2.38025341
83 0.619422019 0.620708763 2.342045165 2.378476115
84 0.608018917 0.644073828 2.339216228 2.383889137
85 0.842521156 0.740410627 2.356087679 2.390947962
86 0.830753046 0.795712056 2.356014032 2.393979036
87 0.818980332 0.787803502 2.355793126 2.394519208
88 0.807206372 0.819491649 2.355425056 2.39367291
89 0.795434581 0.884801548 2.354909986 2.391416546
90 0.78366843 0.860514743 2.354248142 2.38836534
91 0.771911436 0.782474624 2.353439813 2.387763719
92 0.760167158 0.750855586 2.352485352 2.39208585
93 0.748439187 0.736242685 2.351385174 2.395442185
94 0.736731145 0.728017398 2.350139752 2.395900997
95 0.725046672 0.721379842 2.348749621 2.395714875
96 0.713389423 0.718563393 2.347215373 2.395801623
97 0.701763059 0.836474119 2.345537653 2.4038922
98 0.690171242 0.825501656 2.343717164 2.403159302
99 0.678617626 0.799973859 2.34175466 2.404139689
100 0.667105851 0.778368701 2.339650944 2.405862626
101 0.655639537 0.772248403 2.337406869 2.4058515
102 0.644222276 0.74892074 2.335023332 2.404188357
103 0.632857627 0.739633298 2.332501274 2.402081684
104 0.621549109 0.73677302 2.329841677 2.399075227
105 0.610300194 0.724596691 2.327045563 2.398022056
106 0.841930446 0.705837461 2.343571665 2.400856859
107 0.830300095 0.697806442 2.343498923 2.397002702
108 0.818666986 0.689812713 2.343280728 2.391730131
109 0.807034355 0.677365103 2.342917173 2.389677247
110 0.795405495 0.666122379 2.342408412 2.389037481
111 0.783783749 0.658229472 2.34175466 2.388361646
112 0.772172505 0.651840504 2.340956194 2.386719748
113 0.760575186 0.643890177 2.340013348 2.38338621
114 0.74899525 0.63251202 2.338926518 2.379775732
115 0.737436178 0.632535527 2.337696154 2.381046103
117 0.714394643 0.782941833 2.334806917 2.392811849
118 0.702919212 0.793268667 2.333149222 2.394296663
119 0.691478698 0.795868827 2.331350352 2.394038103
120 0.680076612 0.854130536 2.329411023 2.392621591
121 0.668716453 0.888555778 2.327332004 2.389831732
122 0.657401699 0.820963608 2.325114105 2.387631254
123 0.646135804 0.762233195 2.322758184 2.389376747
124 0.634922188 0.741869671 2.320265139 2.394177413
125 0.623764235 0.730654127 2.317635908 2.395746007
126 0.612665285 0.723824005 2.314871466 2.395698801
127 0.841497428 0.719028263 2.331062818 2.395591852
128 0.830001638 0.720118759 2.330990947 2.39614558
129 0.818504827 0.833782777 2.330775363 2.403875571
130 0.807010119 0.818491256 2.330416155 2.403800475
131 0.79552069 0.790744711 2.32991347 2.4054508
132 0.784039762 0.779769598 2.329267511 2.406514295
133 0.772570597 0.77527519 2.328478543 2.405921686
134 0.761116495 0.752178915 2.327546885 2.403984566
135 0.749680781 0.742928805 2.326472913 2.401636591
136 0.738266808 0.736801801 2.325257056 2.398437983
137 0.726877942 0.719764153 2.323899799 2.399309796
138 0.715517564 0.703448737 2.32240168 2.400237897
139 0.704189059 0.696997313 2.320763285 2.394897572
140 0.69289581 0.688064387 2.318985253 2.390813412
141 0.681641194 0.675949958 2.317068267 2.389429037
142 0.670428575 0.665700296 2.315013061 2.388838723
143 0.6592613 0.658341515 2.312820408 2.387920556
144 0.648142688 0.652071807 2.310491127 2.385877945
145 0.637076031 0.644452486 2.308026075 2.382577985
146 0.626064583 0.638722015 2.305426148 2.380877047
147 0.61511156 0.664305098 2.302692278 2.384933498
148 0.841216512 0.751046763 2.318558961 2.391057679
149 0.829852193 0.799021864 2.318487929 2.393773131
150 0.818488493 0.790608423 2.318274861 2.394105638
151 0.807128428 0.821521851 2.317919841 2.393196584
152 0.795775062 0.883675835 2.317423008 2.391130202
153 0.784431501 0.864446336 2.316784559 2.388450194
154 0.773100891 0.784884894 2.316004743 2.387853039
155 0.76178641 0.749469016 2.315083865 2.391907471
156 0.750491262 0.734209468 2.314022284 2.395271758
157 0.739218674 0.725865541 2.312820408 2.395645159
158 0.727971888 0.720429304 2.311478701 2.395468317
159 0.716754157 0.718776365 2.309997674 2.395694916
0 20 40 60 80 100 120 140 160 0.65
0.7 0.75 0.8 0.85 0.9 0.95 1
NUMBER OF SAMPLE (INPUTS)
VAL
U
E O
F
T
H
ET
A 1
THETA1 DESIRED THETA1 ANN PREDICTED
0 20 40 60 80 100 120 140 160
2.3 2.35 2.4 2.45
NUMBER OF SAMPLES (INPUTS)
VA
L
U
E
O
F
T
H
ET
A
2
THETA 2 DESIRED THETA 2 ANN PREDICTED
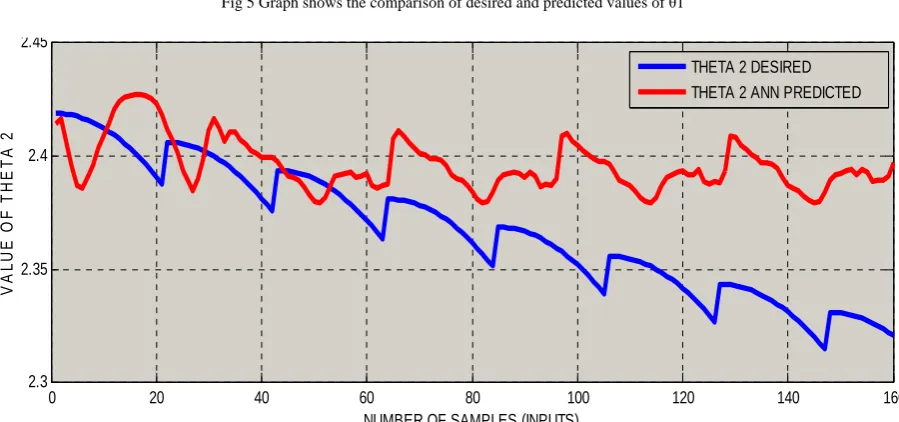
Fig 5 Graph shows the comparison of desired and predicted values of θ1
Fig-6 Graph Shows a comparison of Desired and Predicted values for θ2
The above Fig 5 and 6 represents the comparison of desired values and the ANN predicted values of 160 input data points for both θ1 and θ2. From the graph it is clear that the Network results obtained are approximately equal to the desired values and also within the acceptable range.
2.4 Calculation for Mean Square Error (MSE)
The calculated values and predicted values are evaluated to find the mean square error with the MATLAB programming which shows the following results. Mean square error is observed by the difference of desired values and predicted values. Findings of the errors are in the 1e-3 range which is a fairly good number for the application it is being used in.
Fig- 7 Performance Graph representing the different results for θ1
Fig- 8 Regression Graph θ1 representing the best fit data for different stages.
Fig- 9 Graph representing the gradient, validation check at different epochs forθ1
0 20 40 60 80 100 120 140 160 -0.08
-0.06 -0.04 -0.02 0 0.02 0.04
D
ESIR
ED
PR
ED
IC
T
ED
MEAN SQURE ERROR
NUMBER OF INPUTS FOR THETA 2
Fig- 10. Graph representing the Mean square error (MSE) for θ2
Fig- 11 Performance Graph representing the different results for θ2
Fig- 13 Graph representing the gradient, validation check at different epochs forθ2
The above Fig 10 to 13 shows the mean square error, best fit values and validation checks for different stages like training, testing and validation for θ2values. Mean square error is in the range of -0.07 to 0.02 x 10-2 which is under considerable range of 0.01. the best fit result is obtained at the epoch 2 and the value is 1.2e-.005. From the graph of regression it is clear that the most of the data input points give the better output result and approximately equal to the target value. Neural network calculate the gradient of the slope and also the validity at each epoch the best gradient value is obtained on the epoch 8 and is equal to 1.224e-0.005. and the total no. of validation check is 6. So the above results obtained for θ2values are satisfy the desired values.
3. CONCLUSION AND SCOPE FOR FUTURE WORK
Mathematical models relay on assuming the structure of the model in advanced, which may be sub-optimal. Consequently, many mathematical models fail to simulate the complex behavior of inverse kinematics problem. In contrast, ANN (artificial neural networks) is based on the data input/output data pairs to determine the structure and parameters of the model. Moreover, ANN’s can always be updated to obtain better results by presenting new training examples as new data become available. This artificial neural network based joint angles prediction model can be useful tool for the production engineer’s to estimate the motion of the manipulator accurately.
3.1 Future Scope
In this study the MLP has been proposed for the solution of inverse kinematics problem of robot manipulator. However, it has some limitations. There are several types of soft computing methods are available which can be used for finding the solution, but this is beyond the scope of this thesis but this technique can be used for the future scope of the thesis. These methods are followed:
Application of fuzzy inference system (FIS) Functional link artificial neural network (FLANN) Evaluation computation
Nomenclature
ANN Artificial Neural Network MLP Multiple Layer Perceptron
ANFIS Adaptive Neuro-Fuzzy inference System
Acknowledgement
I wish to express my profound gratitude, respect and honour to my venerable supervisor Dr K.P. Roy, Professor, Department of Mechanical Engineering, IILM, Greater Noida, INDIA for his illuminative and precious guidance, constant supervision, critical opinion and timely suggestion, constant useful encouragement and technical tips which has always been a source of inspiration during the preparation of the project.
I would also like to thank my all classmates and friends for their good and cordial company, healthy discussion and helpful attitude during the study.
I will be failing in my duties if I miss to express my profound and deepest sense of gratitude to my father Mr. Chandrika Prasad, and other members of family for their keen interest in my studies, manifold assistance, immense support and encouragement, without which it was impossible to complete this dissertation.
References
[1] Bill Horne, M. Jamshidi, Nader Vadiee (1990), ‘Neural Networks in Robotics: A Survey’, Journal of Intelligent and Robotic Systems,
Vol.3, pp. 51-66.
[2] Ahmad, Z. Guez, A. (1990), ‘On the solution to the inverse kinematic problem’, IEEE International Conference, Vol.3,
pp.1692-1697.
[3] Nguyen, L.; Patel, R.V.; Khorasani, K (1990), ‘Neural network architectures for the forward kinematics problem inrobotics’,IJCNN
International Joint Conference on Vol.3, pp.393-399.
[4] Kieffer, S. Morellas, V. Donath, M. (1991), ‘Neural network learning of the inverse kinematics relationships for a robot arm’,
Robotics and Automation, IEEE International Conference, Vol.3, pp.2418-2425.
[5] David H. Kemsley, Tony R. Martinez, Douglas M. Campbell (1992), ‘A Survey of Neural Network Research and Fielded
Applications’, International Journal of Neural Networks: Research and Applications, Vol. 2, No. 2/3/4, pp.123-133.
[6] Sebastian Thrun (1994), ‘A Lifelong Learning Perspective for Mobile Robot Control’, Proceedings of the IEEE/RSJ/GI Conference on
Intelligent Robots and Systems.
[7] Hoskins et al. (1994), ‘System and method of global optimization using artificial neural networks’, Schlimberger Technology
Corporation, Austin, Tex.
[8] Ted Hesselroth, Kakali Sarkar, P.Patrick van der Smagt, Klaus Schulten (1994), ‘Neural Network Control of a Pneumatic Robot Arm’,
IEEE Transactions on system, man and cybernetics, Vol.24, No.1, pp.28-38.
[9] P.Payeur, H.Le-Huy, C.Gosselin (1994), ‘Robot Path Planning Using Neural Networks and Fuzzy Logic’, IEEE, pp.800-805.
[10] Samuel H.Huang, Hong-Chao Zhang (1994), ‘Artificial Neural Networks in Manufacturing: Concepts, Applications and Perspectives’,
IEEE Transactions on Components, Packaging, and Manufacturing Technology, Vol.17, No.2, pp.212-228.
[11] Dimitry Gorinevsky, Thomas H. Connolly (1994), ‘Comparison of some neural network and scattered data approximations: The
inverse manipulator kinematics example’, Neural Computation, Vol.6, Iss.3, pp.521-542.
[12] E Janabi-Sharifi (1995), ‘Collision: Modeling, Simulation and Identification of Robotic Manipulators with Environments Interacting’,
Journal of Intelligent and Robotic System, Vol. 13, pp.1-44.
[13] Pierre Payeur, Hoang Le-Huy, Clement M.Gosselin (1995), ‘Trajectory Prediction for Moving Using Artificial Neural Networks’,
IEEE Transactions on Industrial Electronics, Vol.42, No.2, pp.147-158.
[14] Choon seng Yee, Kah-bin Lim (1995), ‘Forward kinematics solution of Stewart platform using neural networks’, Department of
Mechanical and Production Engineering, National University of Singapore.
[15] Sameer M. Prabhu, Devendra P. Garg (1996), ‘Artificial Neural Network Based Robot Control: An Overview’, Journal of Intelligent
and Robotic System, Vol. 15, pp.333-365.
[16] Craig A. Jensen, Russell D. Reed, Robert J. Marks II, Mohamed A. El-Sharkawi, Jae-Byung Jung, Robert T. Miyamoto, Gregory M.
Anderson, Christian J. Eggen (1999), ‘Inversion of Feed forward Neural Networks: Algorithms and Applications’, Accepted for publication in Proceedings of the IEEE, pp.1-19.
[17] Bekir Karlik, Serkan Aydin (1999), ‘ An improved approach to the solution of inverse kinematics problems for robot manipulators’,
Department of EEE, Celal Bayar University, Manisa, Turkey.
[18] Youshen Xia and Jun Wang (2001), ‘A Dual Neural Network for Kinematic Control of Redundant Robot Manipulators’, IEEE
Transactions on Systems, Man, and Cybernetics—Part B: Cybernetics, Vol 31, No. 1, pp.147-154.
[19] Eimei Oyama, Arvin Agah. Karl F. MacDorman, Taro Maeda, Susumu Tachi (2001), ‘A modular neural network architecture for
inverse kinematics model learning’, Neurocomputing, Vol.38-40, pp.797-805.
[20] Rene V. Mayorga and Pronnapa Sanongboon (2002), ‘Inverse kinematics and geometrically bounded singularities prevention of
redundant manipulators: An Artificial Neural Network approach’, Faculty of Engineering, University of Regina, Regina, Sask., Canada.
[21] Patino, H.D.; Carelli, R., Kuchen, B.R. (2002), ‘Neural networks for advanced control of robot manipulators, IEEE Transactions on
Vol.13, Iss.2, pp.343 – 354.
[22] Guilherme De A. Barreto, Aluizio F. R. Araújo, Helge J. Ritter (2003), ‘Self-Organizing Feature Maps for Modeling and Control of
Robotic Manipulators’, Journal of Intelligent and Robotic Systems, Vol. 36, pp.407–450.
[23] Dinesh Manocha, John F.Canny (2007), ‘Efficient Inverse Kinematics for General 6R Manipulators’, IEEE Transactions on Robotics
and Automation, pp.1-10.
[24] Srinivasan Alavandar, M. J. Nigam (2008), ‘Neuro-Fuzzy based Approach for Inverse Kinematics Solution of Industrial Robot
Manipulators’, Int. J. of Computers, Communications & Control, Vol. 3, No. 3, pp. 224-234.
[25] E.A. Al-Gallaf (2008), ‘Neural Networks for Multi-Finger Robot Hand Control’, Eng. Sci., Vol. 19 No. 1, pp.19-42.
[26] H. Sadjadian , H.D. Taghirad, A. Fatehi (2008), ‘Neural Networks Approaches for Computing the Forward Kinematics of a Redundant
Parallel Manipulator’, International Journal of Computational Intelligence Vol. 2 No.1, pp.40-47.
[27] Eimei Oyama, Nak Young, Chong Arvin Agah (2008), ‘Inverse kinematics learning by modular architecture neural networks with
performance prediction networks.’
Biographical notes
Satish Kumar received B. Tech. from Shivaji University, India in 2008 and M.Tech from IIT Delhi, India in 2012, respectively. He is the Head of Department (HOD) in Mechanical Engineering, IILM, Greater Noida India. His area of research is Robotics, Mechatronics and Non-conventional resource of energy.
Kashif Irshad received B. Tech. and M.Tech from Aligarh Muslim University, India in 2008 and 2011, respectively. He is a Assistant Professor in the Department of Mechanical Engineering, IILM, Greater Noida India. His area of research was Ergonomics, Robotics and Mechatronics.
Received xx 20xx Accepted xx 20xx