International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 9, September 2017)
108
Intelligent Control System for MR Damper
Himanshi Acharya
1, Neil Joshi
2, Sonal Rami
3, Dipal Patel
41,2,3Department of Information Technology, CSPIT CHARUSAT CHANGA 4Department of Mechanical Engineering, CSPIT, CHARUSAT CHANGA
3Third Author Affiliation & Address
Abstract—MR fluid has various applications and one of the most important from all is MR damper. In this paper basic structure of MR damper is discussed and with help of mathematical models the characteristics of MR fluid and MR dampers are displayed. These days, the researchers are working upon the control systems for automobile and robotics to make them smarter so that the human efforts can be reduced. For these very purpose, the thorough understanding of those systems is necessary. So to understand the MR damping control system it requires to understand its behaviour, for which there are mathematical models available like Bingham, Bouc Wen and Herschel Buckley. In this work the basic Bouc Wen model is implemented. Then Fuzzy, one of the AI approach is applied to get some of its necessary parameters to get the appropriate results for an MR damper and compared. As many researchers have suggested that it’s feasible to use fuzzy to get the improvised model, it has been used along with neural network.
Keywords— MR damper, AI, Fuzzy, Controller, Neural Network.
I. INTRODUCTION
There are many vibration control systems available which are being used in everyday life. The main components for those system are damper and the system to control that damper. For dampers, there are many possible options available like MRF and ERF. In this paper MRF which is Magneto Rheological Fluid for MR damper is discussed. Also types of mathematical model of MR damper and use of AI approaches on that models to improve performance by comparative studies.
A. MR Fluid
Magnetorheological fluid (MR Fluid) is a smart fluid which changes its characteristics based on applied current. When the high current is applied, it changes from semi solid to liquid state and with low current it changes from liquid to semi solid state. With this amazing characteristics MR fluid is very useful in today’s control system. There are
three modes (Flow mode, shear mode, squeeze mode) [1],
through which one can exploits the properties of MR
fluid.[1,2] In this paper, shear mode is used in MR damper
system which is generally used for breaks, clutches, suspension.
B. MR Damper
A Magnetorheological damper is filled with
[image:1.612.325.571.338.459.2]Magnetorheological fluid. The purpose of using it is that the yield stress could be controlled by controlling the magnetic field. MR fluid is filled in the gap between piston and inside wall of cylinder as shown in figure 1. To work with any system, first requirement is to understand that system by its mathematical model. So, to design control system first step is to implement Mathematical model.
Figure 1 Internal Structure of MR Damper [9].
For MR damper Bingham model, Bouc-Wen model and Herschel Buckley model are used. Bingham model does not support hysteresis behavior. Bouc-wen model which supports the hysteresis behavior of MR fluid is one of the solutions, which is used more for hysteretic nonlinearities, and the model can be used for the flow mode MR damper
[6]. To satisfy that characteristics, fuzzy logic or neural
network may be applicable [5]. The implementation of this
model is shown in section 4. In this paper, Bingham model
and Bouc-wen model is discussed
.
C. Approaches of AI
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 9, September 2017)
109
Steps of Fuzzy Logic:
1. Read input data 2. Fuzzification 3. Define Rules 4. Defuzzificaion
II. MATHEMATICAL MODEL
A. Bingham Model
The idealization of the visco-plastic MR damper model presented in Dyke et al. (1996) uses similarities in the rheological behavior of ER and MR fluids and the similar
techniques in the modeling of ER dampers [4]. Here, the
equation of Bingham model:
Where is velocity, is the frictional force, is the
viscous damping parameter, is the force due to the
presence of the accumulator, and F is damping force. To present the damper behavior, the model is applied on it and shown in figure 2(a) and (b) shows the basic Bingham and Bouc Wen models. The experimental Bingham model is shown in figure 3.
Figure 2(a) Bingham Model [4, 6]
Figure 2(b) Bouc Wen model [4, 6]
B. Bouc Wen Model
It is one of the models that is numerically tractable and has been extensively used to characterize the hysteresis phenomenon in MR dampers, since it possesses force displacement and force–velocity behavior which resembles
that of the real life MR dampers[4][6]. The theoretical Bouc
wen model is shown in figure 2(b)
)
Here, Bouc Wen defines the force by above equation. Where
- is a spring constant
- is a viscous damping constant
α - represents stiffness
[image:2.612.339.549.393.539.2]β, γ, A- are representing smoothness in transition from post yield to pre yield.
Figure 3 Experimental Bingham Model
The Bouc Wen Model is highly depended upon ‘z’ which is also known as the evolutionary parameter for MR
damper[10].
Now to find the values of damping force F, the first requirement is to find the values of ‘z’ parameter. There are several approaches used by different researchers to solve the equation of ‘z’. It can be solved using fourth order RK
method as well as the atan method[10]. Some of those
[image:2.612.99.235.426.620.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 9, September 2017)
110
The other approach to find the values for ‘z’ is to use fuzzy logic, one of the AI approach. Fuzzy logic is very feasible to use since it allows one to make rules for the system.
Here the ‘z’ values are obtained by fuzzy logic itself. The very first approach was to use the difference between Force of real data and the theoretical models data to find the appropriate values of ‘z’.
Now this is what one may get to if the integration is used to find the equation for ‘z’.
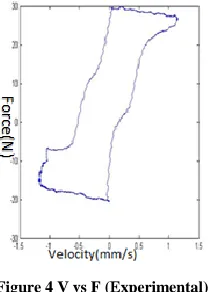
[image:3.612.320.531.153.391.2]Now given this equation, when it was used into the theoretical model the results were not as they were expected.
Figure 4 V vs F (Experimental)
So by applying fuzzy logic on the values of ‘z’ on basis of the given inputs velocity and displacement the smoother and much more accurate results were obtained.
The graph in figure 4 is the result of Bouc Wen model without Fuzzy. The inputs are taken from an actual system situated at Changa, India. Velocity and stroke displacement are taken as inputs and the resultant output is damping force.
III. PROPOSED SYSTEM AND ALGORITHM
Figure 5 Application of FL on Bingham model (Flow chart)
A. Read dataset
Data set of MR damper system (velocity, Displacement, Force). FL learns from the data set shown in the table 1
Table I Partial Input Dataset
No Velocity(mm/s) Force(N) Displacement(m)
1 1.12131 17.21327 -1.58
2 1.12233 17.22228 -1.57
3 1.12334 17.23123 -1.58
[image:3.612.117.222.344.490.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 9, September 2017)
111
Mathematical model
Bouce wen model is used to understand the characteristics of MR damper system.
Equation of Bouce-wen model is as follows:
, It’s the characteristic parameter. Unit: Nms-1.Which is obtained by calculating the slope of the centerline at the maximum velocity point
is Spring constant. Unit: kg/s2.
α - represents stiffness. Unit: Nm-1.
Z is evolutionary variable
is velocity unit : mms-1 , , , , are two points of
velocity and force at maximum velocity and maximum force for slop respectively. A is amplitude.
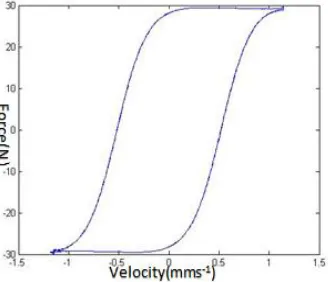
The hysteresis Behavior is highly depended upon , ‘α’
[image:4.612.87.251.520.661.2]and ‘z ‘, Graph of velocity and force obtained by using those variables, is compared with experimental graph. But it didn’t match as the values of ‘z’ were not accurate. So, first it’s necessary to find proper values of ‘z’ .There are several techniques to find the values of ‘z’. For example, Runge kutta 4thorder, atan method, Fuzzy logic and NN.
Figure 6 Theoretical result Bouc Wen model
In this paper, output Obtained by finding values of z using Fuzzy logic. So, velocity, displacement and force, variables of this model are going to be used for fuzzy implementation.
•Apply Fuzzy Logic
Input: Velocity and Displacement.
Output: Evolutionary variable ‘z’ which highly depended on velocity and force.
• Define Range and fuzzy sets:
Range: Velocity (-1.18 to 1.15), Displacement (-5.05 to 4.72), z (-1.16 to 0.28)
Table II
Input data and its defined fuzzy set
No Velocity (mms-1) Displacement(mm) Fuzzy set
1 -1.5 to 0 -1.5 to 0 ZN
2 -0 .5 to 0.5 -0.006 to 1.5 Z
3 0 to 1.6 0.5 to 2 ZP
4 1.4 to 3 1.8 to 3.5 HL
5 2.6 to 4 2 to 4 LS
6 3.6 to 5.5 3.5 to 5 MS
B. Define Ruls
For examples, Rules using above input data.
rule1 = ctrl.Rule(V['LH']&F['LH']&D['VLMN'],Z['SMP'])
rule2 = ctrl.Rule(V['LH']&F['LH']&D['LMN'],Z['MP'])
rule3 = ctrl.Rule(V['LH']&F['LH']&D['MN'],Z['MP'])
rule4 = ctrl.Rule(V['LH']&F['LH']&D['MN'],Z['MPS'])
rule5 = ctrl.Rule(V['LH']&F['LH']&D['ZN'],Z['LSP'])
rule6 = ctrl.Rule(V['LH']&F['LH']&D['Z'],Z['LSP'])
rule7 = ctrl.Rule(V['LH']&F['LH']&D['Z'],Z['SP'])
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 9, September 2017)
112
rule9 = ctrl.Rule(V['H']&F['LH']&D['ZP'],Z['VSP'])
rule10 = ctrl.Rule(V['H']&F['VLH']&D['MP'],Z['VSP'])
C. Defuzzyfication
Used the COG method for defuzzyfication.
Obtained output z:
Table III Z values (output)
No Velocity Displacement Z
1 1.12131 -1.58 0.287161
2 1.12233 -1.57 0.287097
3 1.12334 -1.58 0.287161
4 1.12433 -1.57 0.287097
5 1.12531 -1.54 0.287023
6 1.12627 -1.49 0.287229
7 1.12721 -1.49 0.287229
[image:5.612.42.537.90.699.2]D. Output of Fuzzy logic ‘z’ used into the equation and again check with experimental graph
Table IV
Force after applying Fuzzy Logic
No Velocity(mms-1) Displaceme
nt(m)
Force(N)
1 1.12131 -1.58 27.71589
2 1.12233 -1.57 27.7106
3 1.12334 -1.58 27.71313
4 1.12433 -1.57 27.70788
5 1.12531 -1.54 27.70723
6 1.12627 -1.49 27.74095
7 1.12721 -1.49 27.73967
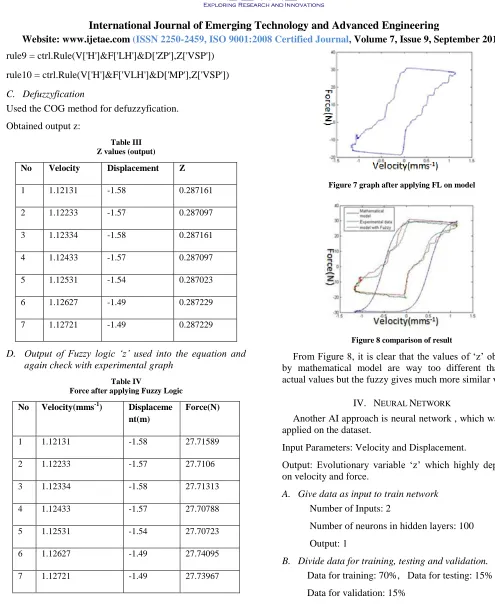
Figure 7 graph after applying FL on model
Figure 8 comparison of result
From Figure 8, it is clear that the values of ‘z’ obtained by mathematical model are way too different than the actual values but the fuzzy gives much more similar values.
IV. NEURAL NETWORK
Another AI approach is neural network , which was also applied on the dataset.
Input Parameters: Velocity and Displacement.
Output: Evolutionary variable ‘z’ which highly depended on velocity and force.
A. Give data as input to train network
Number of Inputs: 2
Number of neurons in hidden layers: 100
Output: 1
B. Divide data for training, testing and validation.
Data for training: 70%, Data for testing: 15%
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 9, September 2017)
[image:6.612.64.273.148.299.2]113
Figure 9 Results comparison (NN)V. CONCLUSION
Based on the characteristics of MR damper, Bingham model and Bouc-wen model both can be used. Bingham model is a basic mathematical model to understand the system, but it does not support the hysteresis behavior of MR damper. By adding additional parameters into the equation of Bingham model, it behaves like Bouc-wen model. So, the next model, Bouc-wen model that supports the hysteresis behavior and satisfies the requirement of MR Damper. By comparing the experimental data with this mathematical model it is clear that to make the accurate mathematical model it is necessary that the model should give the asymmetric results. After comparison of experimental graph and the graph obtained by Bouc-wen with Fuzzy or ANN, it show that use of Fuzzy logic or ANN on Bouc-Wen model gives better results and that accurate model can be used in designing of a control system.so, to design control system this model is used as reference model. Also as the primary objective of this work was to control the current according to the damping force, now to relate the damping force with current the evolutionary parameter ‘z’ of Bouc-Wen model plays the crucial part which is accurately obtained by ANN and Fuzzy.
It can be concluded from this observation that the ANN and Fuzzy provides better control on current according to damping force.
REFERENCES
[1] Choi, Seung-Bok, et al. "State of the art of control schemes for smart systems featuring magneto-rheological materials." Smart Materials and Structures 25.4 (2016): 043001.
[2] Shah, Kruti, and Seung-Bok Choi. "Design of a new adaptive fuzzy controller and its implementation for the damping force control of a magnetorheological damper." Smart Materials and Structures 23.6 (2014): 065012.
[3] AB TALIB, MAT HUSSIN, and IntanZaurah Mat Darus. "Development of Fuzzy Logic Controller by Particle Swarm Optimization Algorithm for Semi-active Suspension System using Magneto-rheological Damper." Recent Advances in Electrical Engineering Series 11 (2013).
[4] Sapiński, Bogdan, and JacekFiluś. "Analysis of parametric models of MR linear damper." Journal of Theoretical and Applied Mechanics 41.2 (2003): 215-240.
[5] Precup, Radu-Emil, and Hans Hellendoorn. "A survey on industrial applications of fuzzy control." Computers in Industry 62.3 (2011): 213-226.
[6] Braz-César, M. T., and Rui Barros. "Experimental behavior and numerical analysis of dampers MR dampers." THE FIFTHTEENTH WORLD CONFERENCE ON EARTHQUAKE ENGINEERING. 2012.
[7] Ali, Omar Adil M., Aous Y. Ali, and Balasem Salem Sumait. "Comparison between the Effects of Different Types of Membership Functions on Fuzzy Logic Controller Performance." International Journal 76 (2015).
[8] Do XuanPhu, Chang-Hyun Cho, and Seung-Bok Choi. "VIBRATION CONTROL OF MAGNETO-RHEOLOGICAL SEAT DAMPER USING A NEW ADAPTIVE FUZZY SLIDING MODE CONTROL.
[9] Zhaoshuo Jiang; Richard Christenson (2011), "Hyperbolic Tangent Model for 200 kN Large-Scale Magneto-Rheological Fluid (MR) Damper,".
![Figure 1 Internal Structure of MR Damper [9].](https://thumb-us.123doks.com/thumbv2/123dok_us/8682950.875159/1.612.325.571.338.459/figure-internal-structure-mr-damper.webp)
![Figure 2(a) Bingham Model [4, 6]](https://thumb-us.123doks.com/thumbv2/123dok_us/8682950.875159/2.612.99.235.426.620/figure-a-bingham-model.webp)