UNIVERSITI TUN HUSSEIN ONN MALAYSIA
PENGESAHAN STATUS PROJEK SARJANA
DEVELOPMENT OF A GENETIC ALGORITHM CONTROLLER FOR CARTESIAN ROBOT
SESI PENGAJIAN: 2008/2009
Saya ONG JOO HUN mengaku membenarkan Projek SaIjana ini disimpan di Perpustakaan dengan syarat -syarat kegunaan seperti berikut:
1. Tesis adalah hakrnilik Universiti Tun Hussein Onn Malaysia.
2. Perpustakaan dibenarkan membuat salinan tmtuk tujuan pengqjian sahaja.
3. Perpustakaan dibenarkan mcmbuat salinan tesis ini sebagai bahan pertukaran antara institusi pengajian tinggi.
4.
**
Sila tandakan (..j)o
SULITTERHAD
TIDAK TERHAD
(TANDATANGAN PENULIS)
Alamat Tetap:
72, Mcdan Mayang Pasir, Bayan Baru,
11950 Pulau Pinang
Tarikh: 5 NOVEMBER 2008
CATATAN:
(Mcngandungi maklumat yang berdaIjalt keselamatan atau kcpcntingan Malaysia seperti yang tcrmaktub di dalam AKT A RAHSIA RASMI 1972)
(Mengandungi maklumat TERHAD yang telalt ditcntukan oleh organisasilbadan di mana pcnyclidikan dijalankan
(TANDATANti
~PENYELIA)
HJ. MOHD AZLAN BIN ABD.SHUKOR (Nama Pcnyelia)
Tarikh: 5 NOVEMBER 2008
"I hereby declare that I have read this thesis and in my opinion this thesis in terms of
content and quality requirements fulfill the purpose for the award ofthe
Master of Electrical Engineering."
Signature
Name of Supervisor HJ. MOHO AZLAN BIN ABD. SHUKOR
DEVELOPMENT OF A GENETIC ALGORITHM CONTROLLER
FOR CARTESIAN ROBOT
ONGJOOHUN
Thesis submitted as a partial fulfilment of the requirement for the degree of
Master of Electrical Engineering
Faculty of Electrical and Electronic Engineering
University Tun Hussein Onn Malaysia
DEVELOPMENT OF A GENETIC ALGORITHM CONTROLLER FOR CARTESIAN ROBOT
ONGJOOHUN
Thesis submitted as a partial fulfilment of the requirement for the degree of Master of Electrical Engineering
Faculty of Electrical and Electronic Engineering University Tun Hussein Onn Malaysia
"I hereby declare that the work in this thesis is my own except for quotations and
summaries which have been duly acknowledged"
Signature ...
h/U-7J~
/.
... .Name of Student ONGJOOHUN
Date 5 NOVEMBER 2008
III
IV
ACKNOWLEDGEMENT
The success of this thesis involves many valued contributions from a number
of persons. I am grateful to my project supervisor, Tuan Haji Mohd Azlan Bin Abd.
Shukor and co-supervisor, Pn. Hjh. Anita Binti Azmi for their invaluable
supervision, advice and guidance in the development of this project till its
completion. They have given me lot of encouragements, and supports that had
motivated me to successfully manage this project.
I would like to acknowledge the Public Service Department of Malaysia
(JP A) for sponsoring my master degree study. I also thank to Associate Professor Mr.
Pang Che Fong for his support. I am deeply indebted to Dr. Johnny Koh Siaw Paw
whose professional careers have always revolved around motion control, reviewed
the motion systems chapter for me, and participated in many more technical
discussions.
Finally, I would like to thank my friend especially Mr. Kantan NL P.
Saminathan who has always given me a full support in studies. Heartfelt gratitude
dedicated to my father, mother and sisters for their kindness, care and
encouragements.
It is my hope that this thesis would contribute to the organizations In
\.
ABSTRACT
VI
ABSTRAK
CHAPTER
CHAPTER I
TABLE OF CONTENTS
CONTENTS
THESIS STATUS CONFIRMATION SUPERVISOR'S CONFIRMATION TITLE
TESTIMONY DEDICATION
ACKNOWLEDGEMENT ABSTRACT
ABSTRAK
TABLE OF CONTENTS LIST OF FIGURES LIST OF TABLES
INTRODUCTION
1.1 Introduction 1.2 Problem Statement
1.3 Project Aims and Objectives 1.4 Project Scope
1.5 Overview of the Project 1.6 Project Contributions 1.7 Thesis Layout
\'\1
PAGE
II
III
IV
V
VI
VII
XII
XV
2
CHAPTER II LITERA TURE REVIEW 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 2.10 2.11 2.12 2.13 Introduction
Modem Technology of Robots
Applications of Robot
Laws of Robots
Classification of Robots
Robot Configurations
Literature Review for Similar Cartesian Robot
Drive Technology
2.8.1 Stepper Motor
Electro-Pneumatic System
Types of Robot Controller and Programming
Software
Literature Review for Similar Projects
2.11.1 Offline Path Planning of Cooperative
Manipulators Using Co-evolutionary
Genetic Algorithm
2.11.2 Cartesian Path Generation of Robot
Manipulators Using Continuous Genetic
Algorithms
Other Intelligent Control Techniques
2.12.1 Neural Networks
2.12.2 Hill Climbing
2.12.3 Simulated Annealing
Overview of Genetic Algorithm (GA)
2.13.1 Encoding
2.13.2 Initial Population Generation
2.13.3 Selection Criteria
2.13.3.1 Methods of Selection
2.13.4 Genetic Algorithm Operators
2.13.4.1 Crossover
2.13.4.2 Mutation
CHAPTER III 2.14
2.15 2.16
2.13.5 Fitness Evaluation Genetic Algorithm Parameters 2.14.1 Crossover Rate 2.14.2 Mutation Rate 2.14.3 Population Size
Advantages of Genetic Algorithms Summary of Literature Review
METHODOLOGY
3.1 Introduction
3.2 Hardware Development 3.3 Electrical Design
3.3.1 Electrical Protection System 3.3.2 Power Distribution System 3.3.3 Main Controller
3.3.4 Input and Output Module 3.3.4.1 Optical Micro Sensor 3.3.4.2 LED Equipped Reed Switch 3.3.5 Electro-Pneumatic System Design for End
Effector (Z Axis)
3.3.6 Control of Stepper Motors 3.3.7 Encoder
3.4 Mechanical Design
3.4.1 Mechanical Drives 3.4.2 Leadscrew Driven Load
3.4.2.1 Movement Profile 3.4.2.2 Acceleration Torque 3.5 Software Development
3.5.1 Simulation Package 3.5.2 GUI Control System
3.5.3 Machine Learning and Database
3.6
3.5.4 3.5.5
GA and Database
Genetic Algorithm Optimization Method 3.5.5.1 Genetic Algorithm Operation 3.5.5.2 3.5.5.3 3.5.5.4 3.5.5.5 Population Crossover Operation Mutation Method GA Optimization Result Machine Synchronization Method
CHAPTER IV RESULTS AND DISCUSSION
4.1 4.2 4.3 4.4 4.5 4.6 4.7 4.8 Overview
Cartesian Robot Arm Kinematics XY Axes Move Module
Parts Fabrication
Machine Performance Results Comparison of GA and Random Efficiency of GA Operators Effect of GA Control Parameters 4.8.1
4.8.2 4.8.3 4.8.4
Number of Maximum Generation Population Size
Effect of Crossover Rate Effect of Mutation Rate
CHAPTER V CONCLUSION
5.1 Conclusion 5.2 Recommendations
REFERENCES
APPENDICES
XI
100 102
104
XII
LIST OF FIGURES
FIGURE TITLE PAGE
1.1 A typical genetic algorithm control system for Cartesian robot 5 1.2 Cartesian robot for laser marking / spot welding application 6
1.3 Block diagram of genetic algorithm controller for Cartesian robot 7
2.1 Components of a robot system 10
2.2 Sensor and control system 11
2.3 Comparison chart ofleading robot applications 12
2.4 Classification of robots 14
2.5 Robot configurations 15
2.6 Stepper motor movements 18
2.7 Electro-pneumatic drive system 19
2.8 A simple feedforward neural network 23
2.9 Flow chart of genetic algorithm 27
2.10 General structure of genetic algorithm 28 2.11 Situation before ranking (graph of fitnesses) 33 2.12 Situation after ranking (graph of order numbers) 33 2.13 Illustration of crossover operation 34 2.14 Mutation operator 35
3.1 Flow chart of the developed Cartesian robot system 42
3.2 Block diagram of the robotic system design 43
3.3 Circuit breaker and noise filter 44
3.4 Wiring diagram for electrical protection system 45
FIGURE TITLE 3.6 3.7 3.8 3.9 3.10 3.11 3.12 3.13 3.14 3.15 3.16 3.17 3.18 3.19 3.20 3.21 3.22 3.23 3.24 3.25 3.26 -3.27 3.28 3.29 3.30 3.31 3.32 3.33 3.34 3.35 3.36 3.37
OEM750X micro stepping drive/controller and wiring connections
Photo micro sensor for limit and horne signal
Reed switch
Signal flow diagram and pneumatic elements
Pneumatic system
Electronic control circuit diagram
The use of limit switches
Operating pattern of detecting horne position
Incremental encoder (Omron E6B2-CWZ6C)
Leadscrew drive system
Basic motion system
Move profile
The generated XY axes report
Basic system software architecture
Simulation package for Cartesian robot system control
VB form layout window
VB source code for opening and reading data from Excel file
Conceptual design of the machine learning process
Machine learning database
Block diagram of machine learning
Visual Basic code for rank based selection
Genetic algorithm operation program
Population with permutation encoding chromosomes
Random numbers for 9 coordinates points
Ranked population
Evaluation subroutine for population
Sorting subroutine
Crossover operation
Mutation subroutine
Resultant of mutation
Resultant of genetic algorithm optimization
Machine synchronization method
FIGURE TITLE 3.38 4.1 4.2 4.3 4.4 4.5 4.6 4.7 4.8 4.9 4.10 4.11 4.12 4.13 4.14 4.15 4.16
Daisy chain configuration for PC communication with controller
The developed Cartesian robot with laser head
Denavit~Hartenberg (D-H) transformation matrix for Cartesian robot
Velocity graph for stepper motor axis # 1 & #2
Torque graph for stepper motor axis #1 & #2
Performance curves for XY axes using S57-102-MO stepper motor
VB source code for XY axes motion and laser marking
Step angle accuracy
Distance comparison between GA and random
Real time control for GA and random
Random search
GA optimization
Percentage of each operator in searching the best solution
Graph of difference versus number of maximum generation
Graph of difference versus population size
Graph of difference versus crossover rate
Graph of difference versus mutation rate
LIST OF TABLES
TABLE TITLE
1.1
2.1
2.2 3.1
3.2 4.1
Number of possible solutions
Explanation of genetic algorithm terms
Various encoding methods
OEM750X micro stepping drive/controller's performance parameter
Leadscrew coefficient of friction and typical efficiencies
Performance parameters
xv
PAGE
3
25
29
46
56
CHAPTER I
INTRODUCTION
1.1 Introduction
A Cartesian coordinate robot is an industrial robot whose one or more
principal axes of control are linear. They move in a straight line rather than rotate.
Among other advantages is that this mechanical arrangement simplifies the robot
control arm solution. Cartesian robots are being widely employed in industrial
applications such as automobile spot welding or assembling lines that handle a
variety of car models. In order to avoid the risk factor in spot welding application,
various steps can be taken. One of the prominent method is by substituting the human
hands with the robotic arm in handling these dangerous and hazardous environments.
It is with these reasons that this study was conducted with the primary objective to design and develop a new low-cost, high-efficiency Cartesian robotic
arm for application such as spot welding. A new evolutionary computation method
using Genetic Algorithm (GA) to control and optimize the system performance in
terms of its positioning and speed that would contribute towards encouraging a
productive and quality process will be developed. GA operates on populations of
2
candidate controller is repeatedly grown according to crossover, mutation and other GA operators and then culled according to the fitness function.
The competition between different companies regarding pnce and performance of the Cartesian robot and control system has been the most important motivation. In case of cost saving on robotics equipments, the solution is an alternative. It also to aware national interest in science and technology and this constitutes a prerequisite for an inventive society.
1.2 Problem Statement
The problem can be stated as: Given a Cartesian robot with a spot welding torch (laser head as replacement of torch), a set of known fixed coordinates with the initial and final configurations, find a coordinated motion plan for the laser head from its initial to final configuration and optimizing the overall time taken for the laser head to perform the spot welding.
To give an idea of the complexity of the problem, let's consider a number of n coordination points and one origin points for the laser head to be fixed at positions (xo, yo). For this application, the search space is a discrete space and there are (n!) permutation scheme of the close routes or path that this robot has to go through. GA will be the search algorithm to find the best or approximate optimization solution for the shortest path and time in this problem.
3
n
~(PI
_ql)2 +(P2 -q2)2 + ... +(Pn -qn)2 =2)p,
_q,)2 (Ll);=1
The developed Cartesian robot is scheduled of a route for the spot welder to perfonn welding on a work piece. In this robotic application, the "cities" are points to weld, and the "cost of travel" includes the time for retooling the robot (single machine job sequencing problem).
Thus, given a set of points C = {ct, C2, ... ,cd, for each pair (cj, Cj), ii:j, let
d(cj, Cj) be the distance between point Cj and c} Solving the TSP entails finding a
pennutation n' of the points (c 1t' (1), ... ,C 1t'(k)), such that
k k
Ld(c"'(i),c"'(i+I))
~
Ld(c"(i)'C"('+I)) (1.2);=1 ;=1
The size of the solution space, q is given in equation 1.2 for n > 2, where n is the number of points. This is the number of Hamiltonian cycles in a complete graph of n nodes, that is, closed paths that visit all nodes exactly once.
1 q = -(n-l)!
2 (1.3)
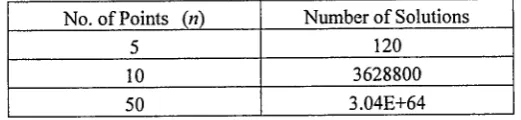
For a laser head with n number of coordination points, the numbers of possible solutions / routes are n! where n = the number of points are given in Table 1.1. Therefore, an evolutionary solution such as genetic algorithm is introduced to optimize the perfonnance and solve the path planning sequences problem in shortest time.
No. of Points
M
Number of Solutions5
120
10
3628800
50
3.04E+64
[image:23.595.177.438.608.668.2]4
1.3 Project Aims and Objectives
The main objective of this project is to design and develop a new low-cost, high efficiency Genetic Algorithm (GA) controller used in Cartesian robotic arm for spot welding application. To achieve this objective, the following works will be carried out during the research period:
1. To design and develop the hardware of the proposed robotic system. This includes both its electrical and mechanical components.
(a) The electrical components consist of two Parker Compumotor OEM750X micro stepping drive/controller as the main controller, an electrical protection system, a power distribution system, input/output modules, an electro-pneumatic-based Z axis, two stepper motors with encoder feedback system and a laser pointer that will replace the spot welding torch for demonstration purpose in this project.
(b) The mechanical components of the proposed robotic system consist of two lead screw drive systems for both X and Y axes, a jig and fixture module and a mechanical base.
2. To develop a machine-learning system and program via a new genetic algorithm that is capable of performing the following analysis:
(a) Reliably and consistently learn and repeat a given tasks.
(b) Ability to look for the optimum sequences via genetic algorithm evolutionary solutions.