2018 International Conference on Computer Science and Software Engineering (CSSE 2018) ISBN: 978-1-60595-555-1
A TOF Localization Algorithm Based on
Improved Double-sided Two Way Ranging
Zihui Wei, Yuexin Lang, Fei Yang and Shuo Zhao
1
ABSTRACT
TOF (Time of Fight, TOF) positioning requires Double-sided Two Way Ranging to achieve triangulation positioning. At present, the main disadvantage of TOF is that it requires multiple distance measurements, resulting in slow positioning speeds. So an improved Double-sided Two Way Ranging method is proposed for this problem. The measurement of distance difference can be used to measure the distance from a mobile node to multiple fixed reference nodes with only one ranging, thereby improving the TOF positioning speed. UWB (Ultra-wideband, UWB) positioning experiment platform is designed, and ranging test verification and accuracy testing is completed. After testing, the positioning accuracy has reached the decimeter level. This method improves the positioning speed of traditional TOF positioning and has a good application prospect.
INTRODUCTION
Nowadays, Global Positioning System (GPS) and Beidou positioning and navigation technologies have been widely used, but they cannot be used in indoor environments due to the occlusion of building12. With the development of Internet of Things technology, positioning and navigation technology must be extended from the outside to the interior. Some technology giants begin to deploy indoor positioning technology such as Google, Microsoft, Apple, Broadcom, etc. At present, indoor positioning technologies mainly include WIFI, Bluetooth, ZigBee3 and other technologies based on signal strength sensing, and can achieve positioning accuracy
Wei Zihui, Lang Yuexin, Yang Fei, ZhaoShuo
of 3-5 meters at most. It relies on Ultra-wideband 4 positioning technology using signal flight time measurement. Ultra-wideband communication technology has anti-multipath with the advantages of strong interference ability and high time resolution, and it can achieve the decimeter-level positioning accuracy 5. Due to the advantages of high positioning accuracy of Ultra-wideband positioning technology, it has become the preferred technical solution for indoor positioning.
UWB positioning is mainly based on TOF and TDOA positioning methods. Wei P et.al 6 designed and implemented an ultra-wideband indoor positioning system. Based on the DW1000 radio frequency chip, the TOF positioning method was used. An efficient multi-radio base station ranging and multi-tag scheduling mechanism was proposed to solve tag conflicts and networking problems. In order to improve the positioning accuracy, Kristóf Attila et.al 7 proposed a method to use the time-of-arrival (TOF) while using the UWB-based passive asynchronous positioning strategy. The method proposed provides low power and fast positioning, making the positioning system more capable. At the same time, fewer messages are needed due to the passive nature of the solution. Le, Tan N et.al 8 propose an improved TDOA (Time Difference of Arrival) localization scheme using PSO (Particle Swarm Optimization) in UWB (Ultra-Wide Band) systems. They use the PSO algorithm to improve performance, re-evaluate TDOA parameters and reposition tag locations. In the LOS (Line-of-Sight) and NLOS (Non-Line-of-Sight) channel environments, superior positioning performance over traditional TDOA positioning is achieved. Chen et.al 9 proposed a differential UWB localization algorithm based on TDOA-UWB indoor positioning technology by referring to differential GPS technology. When the system is subjected to external interference, the positioning error can be reduced by 23% overall.
However, the above methods do not give full play to the advantages of TOF and TDOA positioning in speed and accuracy. This paper introduces the TOF technology and the traditional Double-sided Two Way Ranging first, and then proposes an improved Double-sided Two Way Ranging algorithm. Its advantage is that the master fixed base station does not need to continuously transmit the time-of-day broadcast signal. In combination with TDOA positioning, one measurement is needed to capture the distances of multiple base stations only. To verify the algorithm, a DW1000 RF chip based on IR-UWB communication technology introduced by Decawave was used, and the accuracy test was completed. It greatly improves the positioning speed, can achieve decimeter-level positioning accuracy, and has a good application prospect.
TOF POSITIONING TECHNOLOGY AND SYMMETRICAL DOUBLE-SIDED TWO WAY RANGING
Signal 1
Signal 2
Signal 3 AS
τ
BR τ
BS
τ
AR
τ
AF
τ
BF
τ p
t
p
t
p
t
roundA
t
replyA
t
replyB
t
roundB
t
[image:3.612.216.377.85.241.2]tagA tagB
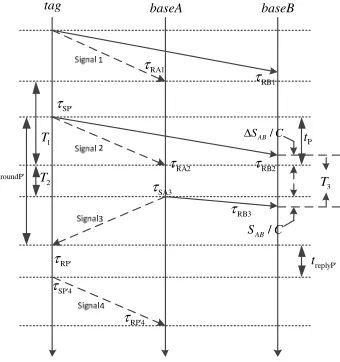
Figure 1. Schematic Diagram of SDS-TWR.
reduce the time measurement error caused by crystal error, it is recommended to use the Symmetrical Double-Sided Two Way Ranging (SDS-TWR) to improve the ranging accuracy through differential operation in the IEEE802.15.4a standard 10.
The Two Way Ranging(TWR)is shown in Figure 1. Node A sends a ranging signal 1 and detects the transmission time. Node B receives the ranging signal and measures the arrival time of the signal. Because there is no clock synchronization between nodes A and B, the ranging signal transmission time cannot be obtained. After Two Way Ranging, node B sends a ranging signal 2 after delay. Node A receives signal 2 and detects the arrival time of the signal. You can get
R Re
2tp =t oundA−t plyB (1-1)
Also measured using TWR of Reverse symmetry
R Re
2tp =t oundB −t plyA (1-2)
then obtain
Re Re
4tp =tRoundA−t plyA+tRoundB−t plyB (1-3)
coordinate calculation. The positioning speed is much higher than TOF positioning, but TOF positioning relative to TDOA positioning has its unique advantages.
Four base stations are set in area of 6 8× m2. We can get the distribution error of TOF and TDOA positioning error by the simulation under the same measurement error. The results show that the accuracy of positioning outside the area and within the area of the TOF positioning base station does not change much. However, the error of positioning outside the TDOA positioning base station area increases significantly.
Therefore, the TOF positioning has a significant advantage in the positioning range with the same base station layout. On the other hand, TOF positioning three-dimensional positioning is better than TDOA positioning. TDOA positioning requires a height difference in installation of base stations to achieve height direction distance difference measurement, and the greater the height difference, the smaller the positioning error in the height direction. Further, it is difficult to install and deploy in practical applications, but TOF positioning does not have this problem. Three-dimensional positioning can also be achieved when the base station is installed in the same horizontal plane. In addition, TDOA positioning needs to implement clock synchronization of each base station, and the design is complicated.
Based on the above analysis, TOF positioning is better than TDOA positioning in the positioning area and three-dimensional positioning. TOF positioning does not require clock synchronization and is easier to implement than TODA. However, the slow positioning speed is its main drawback, which also limits the application of TOF positioning.
IMPROVED SYMMETRICAL DOUBLE-SIDED TWO WAY RANGING
/ AB S C ∆ 3 T / AB S C RA1 τ SP' τ RA2 τ SA3 τ RP' τ SP'4 τ RP'4 τ P t replyP' t roundP' t 1 T 2 T RB1 τ RB2 τ RB3 τ
[image:5.612.206.376.87.268.2]tag baseA baseB
Figure 2. Schematic Diagram of Improved SDS-TWR.
The specific derivation process is as follows:
Assume that the distances from the tag which is mobile node to the A and B base stations are not equal, so the time for the four fixed reference nodes A and B to
receive the signal 1 and the signal 2 is not the same, and the difference is SAB
C
∆
respectively. (C is the speed of light, ∆SABis the distance from the tag to the base
station A, B) After receiving the signal 1 and the signal 2, the base station A measures the receiving time of the two signals τRA1 and τRA2,and calculates the time
difference of reception (τRA2−τRA1).After receiving signal 1 and signal 2 from the
fixed reference node, B measures the receiving time of the two signals τRB1、
2
RB
τ and calculates the receiving time difference (τRB2−τRB1). From a physical point of view, the time interval between the reception of signals 1, 2 at the four fixed reference nodes A, B, C, and D should be the same and should be T1 in the figure, so
the measured values (τRA2−τRA1) and (τRB2−τRB1) should be equal. However, A and B base stations have clock frequency deviations and receive time measurement errors in practice. Regardless of the measurement error of the receiving time, the ratio of the clock frequency deviation of the two nodes A and B is calculated as:
2 1 2 1 ( ) ( ) A A B B
k τ τ
τ τ
− =
− (2-1)
distance difference between the mobile node to the main fixed reference node A and the fixed reference nodes B, C, and D can be calculated as ∆SAB, ∆SAC, ∆SAD,
respectively, to be used in the TDOA positioning.
After receiving the signals 1,2, the main fixed reference node A takes the signal 2 reception time (τRA2−τRA1) as the starting point according to the time interval
measurement value τRA2, and delays the time to transmit the signal 3 at the time τSA3
to give the fixed reference node B, the delay time (τSA3−τRA2) is as close to
2 1
(τRA −τRA) as possible. Message 3 sent from node A contains τRA1、
2
RA
τ 、
3
SA
τ
measurements.
As shown in Figure2, T3 is measured by Node B and the measured value is
3 2
(τRB −τRB ), and corresponding to the node A clock measurement is:
3 2
(τRB −τRB )×k (2-2)
As shown in Figure 3
3 2
AB AB
S S
T T
C C
∆
= + + (2-3)
2
T measured by the A node, the measured value is:
2 SA3 RA2
T =τ −τ (2-4)
After calculation, the time difference between the signals received by the two nodes A and B is:
3 2 3 2
( ) ( )
AB AB
RB RB SA RA
S S
k
C τ τ τ τ C
∆
= − × − − − (2-5)
The measurement of the distance difference between the tag and the base stations A and B can be realized by measuring the transmission and reception times of the signals 1, 2, and 3 between the tag and the base stations A and B. Tag and base station A measure by the time of transmission and reception of signals 2, 3, 4, and refer to Figure 1 to achieve Symmetrical Double-Sided Two Way Ranging.
Then it measure the distance SA between the tag and base station A. According to
A
S ,∆SAB, you can get SB:
B A AB
S =S − ∆S (2-6)
The same process SC,SDcan be obtained. With the improved Symmetrical
Figure 3. Schematic Diagram of UWB Positioning Experiment Platform.
THE DESIGN OF UWB POSITIONING EXPERIMENT PLATFORM
To verify the practicality of the algorithm, we designed the UWB positioning experiment platform. UWB positioning experiment platform node adopts DW1000 radio frequency chip based on IR-UWB communication technology that Decawave Company introduces, and the typical bandwidth is 500MHz11.
The DW1000 can use a delay transmission mechanism to set the delay time based on the current clock count. It can accurately calculate the clock count when the first character of PHR is to be sent, and can add this clock count value to the data packet and send it to the receiver. The above functions ensure that the DW1000 can be used to achieve the time of arrival of the measurement signal and the purpose of performing the Symmetrical Double-Sided Two Way Ranging. The UWB positioning system is shown in Figure 3 and consists of a three-tier architecture consisting of a tag, a base station, and a positioning coordinate calculation server. The DW1000 chip is used for tags and base stations. The label design considers low power consumption and uses the MSP430 series microcontroller as the main controller. Base station adopts stm32 processor. The location base station is connected with the location server through the local area network established by the switch, and realizes data transmission through the TCP/IP protocol and the location server.
s
x
s
y
avg
y
[image:8.612.191.395.86.286.2]avg
x
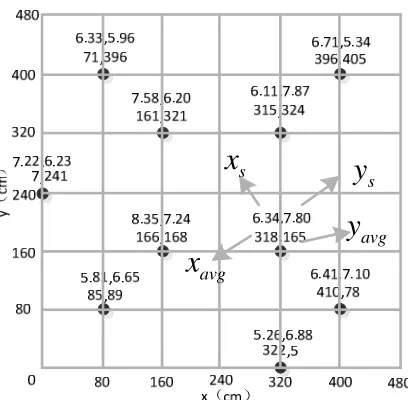
Figure 4. Measurement Parameters of Mobile Nodes at Different Positions in Joint Positioning.
ACCURACY TEST
Under the above test platform, we use improved SDS-TWR to achieve TOF positioning. In order to shorten the positioning time, DW1000 adopts 6.8Mps communication rate, and the time required to complete ranging is about 1.8ms. In the indoor environment, 4 fixed base stations are arranged and the height is 1m. The mobile node selects 10 measurement points under indoor line-of-sight condition, and every measurement point measures 50 numbers, then it calculates the standard deviation of its two-dimensional coordinates. As shown in Figure.4, TOF positioning accuracy can reach 0.1m standard deviation. At the same time, this joint positioning method can meet most of the positioning requirements. (xavg, yavg
-Average of mobile nodes x, y; xs,ys-The standard deviation of mobile nodes x, y)
CONCLUSION
ACKNOWLEDGMENT
This study is supported by Baoding Nanyang Research Institute-Energy Technology Platform (17H02), "Research on Key Technologies of Amusement Facilities Digital Factories" (2016YFF0203103-3).
REFERENCES
1. Suheer A; AbdulMalik A; Hend S. Al-Khalifa, et al. “Ultra-Wideband Positioning: An Analytical Study of Emerging Technologies,” The eighth international conference on sensor technologies and applications, November, 2014,pp.66-74 .
2. C R02hrig; M Müller; J Lategahn. Robust pedestrian localization in indoor environments with an IMU aided TDoA system[J]. in International Conference on Indoor Positioning and Indoor Navigation (IPIN), 2015 :465-472.
3. Ledvina B M, Bencze W J, Galusha B, et al. An in-line antispoofing device for legacy civil GPS receivers[C] / / Proceedings of the 2010 International Technical Meeting of the Institute of Navigation. Manassas, VA: The Institute of Navigation, 2010: 698 -712.
4. Kim T H, Sin C S, Lee S. Analysis of effect of spoofing signal in GPS receiver [C] / / Proceedings of the 2012 12th International Conference on Control, Automation and Systems. Piscataway, NJ: IEEE, 2012: 2083-2087.
5. Wei Z H, Feng Z H, Wang Z F, et al. Design and Application Test of IR-UWB Positioning Unit[J]. TV technology, 2014, 38(23):60-63.
6. Wei P, Jiang P, He JJ, Zhang HM, “Ultra - Wideband Indoor Location Based on Interior Triangle Centroid Algorithm,” Computer application 2017, pp. 289-293.
7. Kristóf Attila Horváth; Gergely Ill; Ákos Milánkovich,“Passive extended double-sided two-way ranging algorithm for UWB positioning,” Ubiquitous and Future Networks (ICUFN), 2017 Ninth International Conference on. IEEE,2017, pp. 482–487.
8. Le, Tan N.; Kim, Jae-Woon; Shin. Yo-An. An Improved TDOA Localization with Particle Swarm Optimization in UWB Systems[J]. The Journal of Korean Institute of Communications and Information Sciences. 2010, 35(1):87-95.
9. Chen XS, Shen Z, Zhou Q, et al. Research on Differential UWB Indoor Positioning System Based on TDOA Algorithm[J]. Modern Electronic Technology, 2018, (6):45-49.
10. Sarogini Grace Pease, Paul P. Conway, Andrew A. West, “Hybrid ToF and RSSI real-time semantic tracking with an adaptive industrial internet of things architecture,” In Journal of Network and Computer Applications, 2017, pp. 98-109.