Lecture 7
Numerical characteristics of random variables
Plan of the lecture:
1. Discrete random variables: expectation, mean and variance
2. Continuous random variables: expectation, mean and variance
3. Mode and median of random variable
3.1 Mode (mode of a probability distribution)
3.2 Median
3.3 Comparison of mean, median and mode
4. Moments
4.1 Significance of the moments
4.2 Skewness
4.3 Kurtosis
1 Discrete random variables: expectation, mean and variance
The PMF of a random variable 𝑋 provides us with several numbers, the probabilities of
all the possible values of 𝑋. It would be desirable to summarize this information in a single
representative number. This is accomplished by the expectation of 𝑋, which is a weighted (in
proportion to probabilities) average of the possible values of 𝑋.
As motivation, suppose you spin a wheel of fortune many times. At each spin, one of the
numbers 𝑚1, 𝑚2, . . . , 𝑚𝑛 comes up with corresponding probability 𝑝1, 𝑝2, . . . , 𝑝𝑛, and this is
your monetary reward from that spin. What is the amount of money that you “expect” to get “per
spin”? The terms “expect” and “per spin” are a little ambiguous, but here is a reasonable
interpretation.
Suppose that you spin the wheel 𝑘 times, and that 𝑘𝑖 is the number of times that the
outcome is 𝑚𝑖. Then, the total amount received is 𝑚1𝑘1+ 𝑚2𝑘2+ ⋯ + 𝑚𝑛𝑘𝑛. The amount received per spin is
𝑀 = 𝑚1𝑘1+𝑚2𝑘2+⋯+𝑚𝑛𝑘𝑛
𝑘 .
If the number of spins 𝑘 is very large, and if we are willing to interpret probabilities as
relative frequencies, it is reasonable to anticipate that 𝑚𝑖 comes up a fraction of times that is roughly equal to 𝑝𝑖:
𝑝𝑖 ≈ 𝑘𝑖
𝑘, 𝑖 = 1, … , 𝑛.
Thus, the amount of money per spin that you “expect” to receive is
𝑀 = 𝑚1𝑘1+𝑚2𝑘2+⋯+𝑚𝑛𝑘𝑛
𝑘 ≈ 𝑚1𝑝1+ 𝑚2𝑝2+ ⋯ + 𝑚𝑛𝑝𝑛.
Motivated by this example, we introduce an important definition.
Expectation
We define the expected value (also called the expectation or the mean) of a random
variable 𝑋, with PMF 𝑝𝑋(𝑥), by
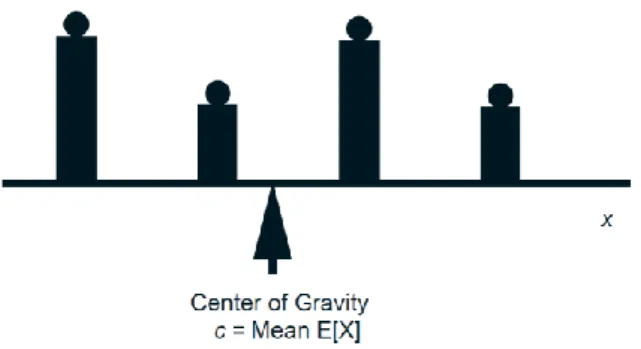
It is useful to view the mean of 𝑋as a “representative” value of 𝑋, which lies somewhere
in the middle of its range. We can make this statement more precise, by viewing the mean as the
center of gravity of the PMF, in the sense explained in Fig. 1.
Figure 1: Interpretation of the mean as a center of gravity. Given a bar with a weight 𝑝𝑋(𝑥)
placed at each point 𝑥with 𝑝𝑋(𝑥) > 0, the center of gravity 𝑐 is the point at which the sum of
the torques from the weights to its left are equal to the sum of the torques from the weights to its
right, that is,
(𝑥 − 𝑐)𝑝𝑥 𝑋(𝑥)= 0, or 𝑐 = 𝑥𝑝𝑥 𝑋(𝑥),
and the center of gravity is equal to the mean 𝐸[𝑋].
There are many other quantities that can be associated with a random variable and its
PMF. For example, we define the 2nd moment of the random variable 𝑋 as the expected value
of the random variable 𝑋2. More generally, we define the nth moment as 𝐸[𝑋𝑛], the expected
value of the random variable 𝑋𝑛. With this terminology, the 1st moment of 𝑋is just the mean. The most important quantity associated with a random variable 𝑋, other than the mean, is
its variance, which is denoted by var(𝑋) and is defined as the expected value of the random
variable 𝑋 − 𝐸[𝑋] 2, i.e.,
var(𝑋) = 𝐸 𝑋 − 𝐸[𝑋] 2 .
Since 𝑋 − 𝐸[𝑋] 2 can only take nonnegative values, the variance is always nonnegative.
The variance provides a measure of dispersion of 𝑋around its mean. Another measure of
dispersion is the standard deviation of 𝑋, which is defined as the square root of the variance
and is denoted by 𝜎𝑋:
The standard deviation is often easier to interpret, because it has the same units as 𝑋. For
example, if 𝑋measures length in meters, the units of variance are square meters, while the units
of the standard deviation are meters.
One way to calculate var(𝑋), is to use the definition of expected value, after calculating
the PMF of the random variable 𝑋 − 𝐸[𝑋] 2.
It turns out that there is an easier method to calculate var(𝑋), which uses the PMF of 𝑋
but does not require the PMF of 𝑋 − 𝐸[𝑋] 2. This method is based on the following rule.
Expected Value Rule for Functions of Random Variables
Let 𝑋be a random variable with PMF 𝑝𝑋(𝑥), and let 𝑔(𝑋) be a real-valued function of 𝑋.
Then, the expected value of the random variable 𝑔(𝑋) is given by
𝐸 𝑔(𝑋) = 𝑔(𝑥)𝑝𝑥 𝑋(𝑥).
Using the expected value rule, we can write the variance of 𝑋as
var 𝑋 = 𝐸 𝑋 − 𝐸 𝑋 2 = 𝑥 − 𝐸 𝑋 2𝑝 𝑋(𝑥)
𝑥 .
Similarly, the 𝒏th moment is given by
𝐸 𝑋𝑛 = 𝑥𝑛𝑝 𝑋(𝑥)
𝑥 ,
and there is no need to calculate the PMF of 𝑿𝒏.
As we have noted earlier, the variance is always nonnegative, but could it be zero? Since
every term in the formula 𝑥 − 𝐸 𝑋 𝑥 2𝑝𝑋(𝑥) for the variance is nonnegative, the sum is zero
if and only if 𝑥 − 𝐸 𝑋 2𝑝𝑋 𝑥 = 0 for every 𝑥. This condition implies that for any 𝑥 with 𝑝𝑋 𝑥 > 0, we must have 𝑥 = 𝐸[𝑋] and the random variable 𝑋 is not really “random”: its
experimental value is equal to the mean 𝐸[𝑋], with probability 1.
Variance
The variance var(𝑋) of a random variable 𝑋is defined by
var 𝑋 = 𝐸 𝑋 − 𝐸 𝑋 2
var 𝑋 = 𝑥 − 𝐸 𝑋 2𝑝 𝑋(𝑥)
𝑥 .
It is always nonnegative. Its square root is denoted by 𝜎𝑋 and is called the standard deviation.
Mean and Variance of a Linear Function of a Random Variable
Let 𝑋be a random variable and let
𝑌 = 𝑎𝑋 + 𝑏,
where 𝑎and 𝑏are given scalars. Then,
𝐸[𝑌] = 𝑎𝐸[𝑋] + 𝑏, var(𝑌) = 𝑎2var(𝑋).
Let us also give a convenient formula for the variance of a random variable 𝑋with given
PMF.
Variance in Terms of Moments Expression
var 𝑋 = 𝐸 𝑋2 − 𝐸[𝑋] 2.
This expression is verified as follows:
var 𝑋 = 𝑥 − 𝐸 𝑋 2𝑝 𝑋 𝑥 𝑥
= 𝑥2 − 2𝑥𝐸 𝑋 + 𝐸 𝑋 2 𝑝 𝑋 𝑥 𝑥
= 𝑥2𝑝 𝑋 𝑥 𝑥
− 2𝐸 𝑋 𝑥𝑝𝑋 𝑥 𝑥
+ 𝐸 𝑋 2 𝑝 𝑋 𝑥 𝑥
= 𝐸 𝑋2 − 2 𝐸 𝑋 2+ 𝐸 𝑋 2
= 𝐸 𝑋2 − 𝐸 𝑋 2.
Properties of Expectation:
If 𝑋 ≥ 0, than 𝐸[𝑋] ≥ 0.
𝐸 𝐶 = 𝐶, where 𝐶 constant.
𝐸 𝑋 + 𝑌 = 𝐸 𝑋 + 𝐸 𝑌 .
If 𝑋 ≥ 𝑌, than 𝐸[𝑋] ≥ 𝐸[𝑌].
𝐸 𝑋 ≤ 𝐸 𝑋 .
If random variables 𝑋 and 𝑌 are independent, than 𝐸 𝑋𝑌 = 𝐸 𝑋 𝐸 𝑌 .
Properties of Variance:
var 𝐶 = 0, where 𝐶 constant.
var 𝐶𝑋 = 𝐶2var 𝑋 , where 𝐶 constant.
var 𝑋 + 𝑌 = var 𝑋 + var 𝑌 .
var 𝑋 + 𝐶 = var 𝑋 , where 𝐶 constant.
var 𝑋 − 𝑌 = var 𝑋 + var 𝑌 .
2 Continuous random variables: expectation, mean and variance
The expected value or mean of a continuous random variable 𝑋is defined by
𝐸[𝑋] = 𝑥𝑓−∞∞ 𝑋(𝑥)𝑑𝑥.
This is similar to the discrete case except that the PMF is replaced by the PDF, and
summation is replaced by integration. As earlier, 𝐸[𝑋] can be interpreted as the “center of
gravity” of the probability law and, also, as the anticipated average value of X in a large number
of independent repetitions of the experiment. Its mathematical properties are similar to the
discrete case – after all, an integral is just a limiting form of a sum.
If 𝑋is a continuous random variable with given PDF, any real-valued function 𝑌 = 𝑔(𝑋)
of 𝑋 is also a random variable. Note that 𝑌 can be a continuous random variable: for example,
consider the trivial case where 𝑌 = 𝑔(𝑋) = 𝑋. But 𝑌 can also turn out to be discrete. For
example, suppose that 𝑔(𝑥) = 1 for 𝑥 > 0, and 𝑔(𝑥) = 0, otherwise. Then 𝑌 = 𝑔(𝑋) is a
discrete random variable. In either case, the mean of 𝑔(𝑋) satisfies the expected value rule
𝐸 𝑔(𝑋) = 𝑔(𝑥)𝑓−∞∞ 𝑋(𝑥)𝑑𝑥,
in complete analogy with the discrete case.
The 𝑛th moment of a continuous random variable 𝑋 is defined as 𝐸[𝑋𝑛], the expected value of the random variable 𝑋𝑛. The variance, denoted by var(𝑋), is defined as the expected
We now summarize this discussion and list a number of additional facts that are
practically identical to their discrete counterparts.
Expectation of a Continuous Random Variable and its Properties
Let 𝑋be a continuous random variable with PDF 𝑓𝑋.
The expectation of 𝑋is defined by
𝐸[𝑋] = 𝑥𝑓−∞∞ 𝑋(𝑥)𝑑𝑥.
The expected value rule for a function 𝑔(𝑋) has the form
𝐸 𝑔(𝑋) = 𝑔(𝑥)𝑓−∞∞ 𝑋(𝑥)𝑑𝑥.
The variance of X is defined by
var 𝑋 = 𝐸 𝑋 − 𝐸 𝑋 2 = 𝑋 − 𝐸 𝑋 2𝑓
𝑋(𝑥)𝑑𝑥 ∞
−∞ .
We have
0 ≤ var(𝑋) = 𝐸 𝑋2 − 𝐸 𝑋 2.
If 𝑌 = 𝑎𝑋 + 𝑏, where 𝑎and 𝑏are given scalars, then 𝐸[𝑌] = 𝑎𝐸[𝑋] + 𝑏, var(𝑌) = 𝑎2var(𝑋).
3 Mode and median of random variable
3.1 Mode (mode of a probability distribution)
The mode of a discrete probability distribution is the value 𝑥 at which its probability
mass function takes its maximum value. In other words, it is the value that is most likely to be
sampled.
The mode of a continuous probability distribution is the value 𝑥 at which its
probability density function attains its maximum value, so, informally speaking, the mode is at
The mode is not necessarily unique, since the probability mass function or probability
density function may achieve its maximum value at several points 𝑥1, 𝑥2, etc.
The above definition tells us that only global maxima are modes. Slightly confusingly,
when a probability density function has multiple local maxima it is common to refer to all of the
local maxima as modes of the distribution. Such a continuous distribution is called multimodal
(as opposed to unimodal).
In symmetric unimodal distributions, such as the normal (or Gaussian) distribution (the
distribution whose density function, when graphed, gives the famous "bell curve"), the mean (if
defined), median and mode all coincide. For samples, if it is known that they are drawn from a
symmetric distribution, the sample mean can be used as an estimate of the population mode.
3.2 Median
In probability theory and statistics, a median is described as the numeric value separating
the higher half of a sample, a population, or a probability distribution, from the lower half. The
median of a finite list of numbers can be found by arranging all the observations from lowest
value to highest value and picking the middle one. If there is an even number of observations,
then there is no single middle value, so one often takes the mean of the two middle values.
In a sample of data, or a finite population, there may be no member of the sample whose
value is identical to the median (in the case of an even sample size) and, if there is such a
member, there may be more than one so that the median may not uniquely identify a sample
member. Nonetheless the value of the median is uniquely determined with the usual definition,
The median can be used as a measure of location when a distribution is skewed, when
end values are not known, or when one requires reduced importance to be attached to outliers,
e.g. because they may be measurement errors. A disadvantage of the median is the difficulty of
handling it theoretically.
The median of some variable 𝑋 is denoted as 𝑋 or as 𝜇1 2(𝑋).
For any probability distribution on the real line with cumulative distribution function 𝐹𝑋,
regardless of whether it is any kind of continuous probability distribution, in particular an
absolutely continuous distribution (and therefore has a probability density function), or a discrete
probability distribution, a median 𝑚 satisfies the inequalities
𝑃 𝑋 ≤ 𝑚 ≥1
or
𝑑𝐹𝑋(𝑥)
𝑚
−∞
≥1
2 𝑎𝑛𝑑 𝑑𝐹𝑋(𝑥)
∞
𝑚
≥1 2
in which a Lebesgue–Stieltjes integral is used. For an absolutely continuous probability
distribution with probability density function ƒ𝑋, we have
𝑃 𝑋 ≤ 𝑚 = 𝑃 𝑋 ≥ 𝑚 = ƒ−∞𝑚 𝑋(𝑥)𝑑𝑥 = 12.
Medians of particular distributions. The medians of certain types of distributions can be
easily calculated from their parameters. The median of a normal distribution with mean 𝜇 and
variance 𝜎2 is 𝜇. In fact, for a normal distribution, 𝑚𝑒𝑎𝑛 = 𝑚𝑒𝑑𝑖𝑎𝑛 = 𝑚𝑜𝑑𝑒. The median of a
uniform distribution in the interval [𝑎, 𝑏] is (𝑎 + 𝑏)/2, which is also the mean. The median of a
Cauchy distribution with location parameter 𝑥0 and scale parameter 𝑦 is 𝑥0, the location
parameter. The median of an exponential distribution with rate parameter 𝜆 is the natural
logarithm of 2 divided by the rate parameter: 𝜆−1ln2. The median of a Weibull distribution with
shape parameter 𝑘 and scale parameter 𝜆 is 𝜆(ln2)1/𝑘.
3.3 Comparison of mean, median and mode
Comparison of common averages
Type Description Equation Example Result
Arithmetic
mean
Total sum divided
by quantity of
integers
𝑥 =1 𝑛 𝑥𝑖
𝑛
𝑖=1
= 1
𝑛 𝑥1+ ⋯ + 𝑥𝑛
(1+2+2+3+4+7+9)
/ 7 4
Median
Middle value that
separates the greater
and lesser halves of
a data set
Mode Most frequent
number in a data set 1, 2, 2, 3, 4, 7, 9 2
4 Moments
4.1 Significance of the moments
The moments describe the nature of the distribution. Any distribution can be
characterized by a number of features such as the mean, the variance, the skewness, etc. The
first moment about zero, if it exists, is the expectation of 𝑋, i.e. the mean of the probability
distribution of 𝑋, designated 𝜇. In higher orders, the central moments are more interesting than
the moments about zero.
The 𝒏th central moment of the probability distribution of a random variable 𝑋 is
𝜇𝑛 = 𝐸 𝑋 − 𝜇 𝑛 .
The first central moment is thus 0.
The second central moment is the variance, the positive square root of which is the
standard deviation, 𝜎.
The normalized 𝒏th central moment or standardized moment is the 𝑛th central
moment divided by 𝜎𝑛; the normalized 𝑛th central moment of 𝑥 = 𝐸((𝑥 − 𝜇)𝑛)/𝜎𝑛. These
normalized central moments are dimensionless quantities, which represent the distribution
independently of any linear change of scale.
The cumulants 𝜅𝑛 of a random variable 𝑋 are defined by the cumulant-generating function, the logarithm of the moment-generating function, if it exists:
𝑔 𝑡 = 𝑙𝑜𝑔 𝐸 𝑒𝑡𝑋 = 𝜅 𝑛𝑡
𝑛
𝑛! ∞
𝑛=1 = 𝜇𝑡 + 𝜎2 𝑡
2
2 + ⋯.
The cumulants are then given by derivatives (at zero) of 𝑔(𝑡):
𝜅1 = 𝜇 = 𝑔′(0),
𝜅2 = 𝜎2 = 𝑔"(0),
𝜅𝑛 = 𝑔(𝑛)(0).
The cumulants of a distribution are closely related to distribution's moments. If a random
variable 𝑋 admits an expected value 𝜇 = 𝐸(𝑋) and a variance 𝜎2 = 𝐸((𝑋 − 𝜇)2), then these are
the first two cumulants: 𝜅1 = 𝜇 and 𝜅2 = 𝜎2.
4.2 Skewness
In probability theory and statistics, skewness is a measure of the asymmetry of the
probability distribution of a real-valued random variable.
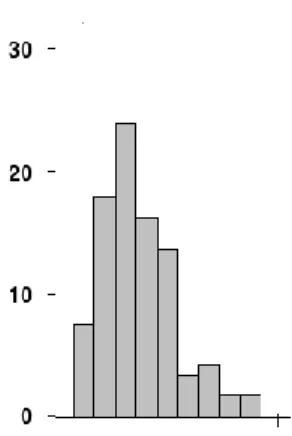
Figure 2. Example of experimental data with non-zero skewness (gravitropic response of wheat
coleoptiles, 1,790)
Consider the distribution on the figure. The bars on the right side of the distribution taper
differently than the bars on the left side. These tapering sides are called tails, and they provide a
visual means for determining which of the two kinds of skewness a distribution has:
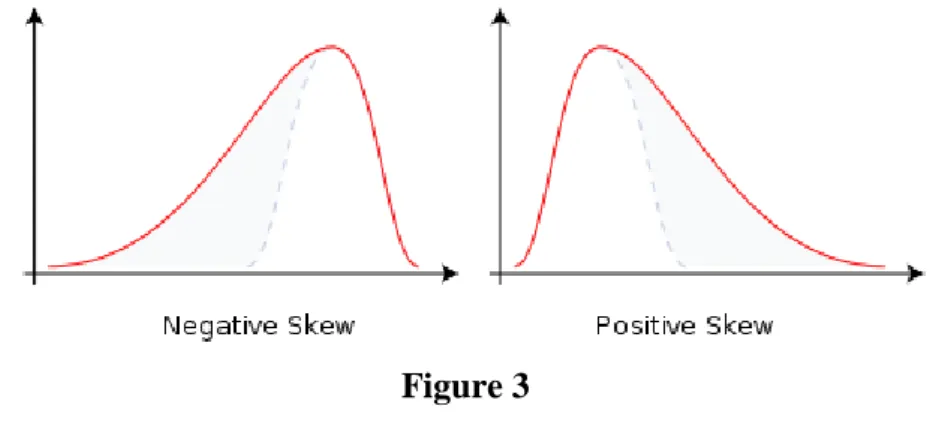
negative skew: The left tail is longer; the mass of the distribution is concentrated on the right of the figure. It has relatively few low values. The distribution is said to be
left-skewed. Example (observations): 1, 1000, 1001, 1002, 1003.
positive skew: The right tail is longer; the mass of the distribution is concentrated on the left of the figure. It has relatively few high values. The distribution is said to be
right-skewed. Example (observations): 1, 2, 3, 4, 100.
If there is zero skewness (i.e., the distribution is symmetric) then the 𝑚𝑒𝑎𝑛 = 𝑚𝑒𝑑𝑖𝑎𝑛.
(if, in addition, the distribution is unimodal, then the 𝒎𝒆𝒂𝒏 = 𝒎𝒆𝒅𝒊𝒂𝒏 = 𝒎𝒐𝒅𝒆).
Many textbooks teach a rule of thumb stating that the mean is right of the median under
right skew, and left of the median under left skew. This rule fails with surprising frequency. It
heavy. Most commonly, though, the rule fails in discrete distributions where the areas to the left
and right of the median are not equal. Such distributions not only contradict the textbook
relationship between mean, median, and skew, they also contradict the textbook interpretation of
the median.
Figure 3
Definition
The skewness or the third standardized moment of a random variable 𝑋, is denoted 𝛾1
and defined as
𝛾1 = 𝜇3
𝜎3 =
𝐸 𝑋−𝜇 3
𝐸 𝑋−𝜇 23 2,
where 𝜇3 is the third moment about the mean 𝜇, and 𝜎 is the standard deviation. Equivalently,
skewness can be defined as the ratio of the third cumulant 𝜅3 and the third power of the square
root of the second cumulant 𝜅2:
𝛾1 = 𝜅3
𝜅23 2.
The skewness of a random variable 𝑋 is sometimes denoted Skew[𝑋].
For a sample of 𝑛 values the sample skewness is
𝑔1 = 𝑚3
𝑚23 2 =
1
𝑛 𝑛𝑖=1 𝑥𝑖−𝑥 3 1
𝑛 𝑛𝑖=1 𝑥𝑖−𝑥 2 3 2,
where 𝑥𝑖 is the 𝑖𝑡 value, 𝑥 is the sample mean, 𝑚3 is the sample third central moment, and 𝑚2
is the sample variance.
If 𝑌 is the sum of 𝑛 independent random variables, all with the same distribution as 𝑋,
4.3 Kurtosis
In probability theory and statistics, kurtosis (from the Greek word κσρτός, kyrtos or
kurtos, meaning bulging) is a measure of the "peakedness" of the probability distribution of a
real-valued random variable. Higher kurtosis means more of the variance is the result of
infrequent extreme deviations, as opposed to frequent modestly sized deviations.
The fourth standardized moment is defined as
𝜇4
𝜎4,
where 𝜇4 is the fourth moment about the mean and 𝜎 is the standard deviation. This is sometimes
used as the definition of kurtosis in older works, but is not the definition used here.
Kurtosis is more commonly defined as the fourth cumulant divided by the square of the
second cumulant, which is equal to the fourth moment around the mean divided by the square of
the variance of the probability distribution minus 3,
𝛾2 = 𝜅4
𝜅22 =
𝜇4
𝜎4− 3,
which is also known as excess kurtosis. The "minus 3" at the end of this formula is often
explained as a correction to make the kurtosis of the normal distribution equal to zero. Another
reason can be seen by looking at the formula for the kurtosis of the sum of random variables.
Because of the use of the cumulant, if 𝑌 is the sum of 𝑛 independent random variables, all with
the same distribution as 𝑋, then Kurt[𝑌] = Kurt[𝑋]/𝑛, while the formula would be more
complicated if kurtosis were defined as 𝜇𝜎4
4.
More generally, if 𝑋1, ..., 𝑋𝑛 are independent random variables all having the same
variance, then
Kurt 𝑛𝑖=1𝑋𝑖 =𝑛12 𝑛𝑖=1Kurt 𝑋𝑖 ,
whereas this identity would not hold if the definition did not include the subtraction of 3.
The fourth standardized moment must be at least 1, so the excess kurtosis must be −2 or
more (the lower bound is realized by the Bernoulli distribution with 𝑝 = ½, or "coin toss"); there
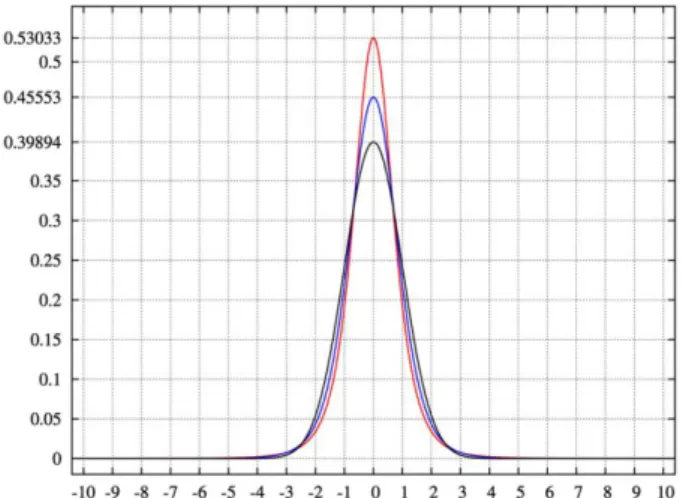
Figure 4.pdf for the Pearson type VII distribution with kurtosis of infinity (red); 2 (blue); and 0
(black)
Figure 5. Kurtosis of well-known distributions
In this example we compare several well-known distributions from different parametric
families. All densities considered here are unimodal and symmetric. Each has a mean and
skewness of zero. Parameters were chosen to result in a variance of unity in each case.
D: Laplace distribution, a.k.a. double exponential distribution, red curve, excess kurtosis
= 3
S: hyperbolic secant distribution, orange curve, excess kurtosis = 2
L: logistic distribution, green curve, excess kurtosis = 1.2
N: normal distribution, black curve, excess kurtosis = 0
C: raised cosine distribution, cyan curve, excess kurtosis = −0.593762...
W: Wigner semicircle distribution, blue curve, excess kurtosis = −1
U: uniform distribution, magenta curve, excess kurtosis = −1.2.
Note that in these cases the platykurtic densities have bounded support, whereas the
There exist platykurtic densities with infinite support, e.g., exponential power
distributions with sufficiently large shape parameter b, and there exist leptokurtic densities with
finite support, e.g., a distribution that is uniform between −3 and −0.3, between −0.3 and 0.3, and