3731 IJSTR©2019
Grasshopper Optimization Based Clustering
Algorithm (GOCA) For Adaptive Flying Ad-Hoc
Network (FANET) To Enhance The Quality Of
Service (Qos)
Ankur Pandey, Dr. Piyush Kumar Shukla, Dr. Ratish Agrawal, Ankur Khare
Abstract : Unmanned aerial vehicles (UAVs) are broadly used for disaster and rescue operations in flying ad-hoc networks (FANETs). UAVs generate problems like small time for flying and infertile routing due to limited power of battery and high velocity. In this paper, t hese issues will be condensed by utilizing efficient Grasshopper Optimization based Clustering Algorithm (GOCA). The performance of clustering is enhanced by using the grasshopper optimization algorithm and outputs are analyzed in terms of several performance parameters and compared with other optimization approaches like CLPSO, CACONET, and GWOCNET. The experimental results represent that the GOCA has been generated better efficiency than CLPSO, CACONET, and GWOCNET on the basis of packet delivery ratio (PDR), cluster lifetime, end to end delay and consumed energy.
Keywords: Clustering, Grasshopper Optimization Algorithm, Rescue Operations, Unmanned aerial vehicles.
————————————————————
1
INTRODUCTION
Unmanned aerial vehicles (UAVs) are highly useful rising systems which offered vigorous and consistent communication in various applications like disaster, rescue and military operation in vehicular ad hoc network (VANET) and mobile ad hoc network (MANET) [1, 2, 16]. UAVs are also utilized in multimedia communication with 5G [4] environment to permit the Internet of Things (IoT) for omnipresent computing [14]. The protection and communication [5] overhead issues are general shortcomings of UAVs utilized for smart-phones in wireless sensor networks [6]. Packet collision is also a major issue in UAVs. These issues are decreased by an on-require multi UAV [10] having reliable control through remote communication between IoT things [12]. Drones are specific UAVs having highest velocity and adaptive nature to find the target objects in minimum time duration [4]. Flying Ad-hoc Network (FANET) [4] is a bendable and manageable communication concept which generates communication among fast UAVs in 3D environment and OPNET is calculated the results in terms of end to end delay and throughput [3, 11]. FANET uses two routing protocols like AODV and OLSR which are also evaluated packet delivery ratio [15]. The major problems with power utilization and node velocity are decreased by using clustering in MANET but the low strength of cluster obtains system failures in the MANET. The clustering is performed by obtaining a cluster head node and their member nodes to reduce the length of paths and time of message transmission of UAVs [13] in Wireless Sensor Networks (WSN) [8]. Weighted Clustering Algorithm (WCA) is enhanced by modifying some parameter of WCA and improved the efficiency of network
and decreasing costs of computation and communication for MANET [7]. Bio-inspired Ant Colony Optimization based Clustering Algorithm (CACONET) is implemented to enhance the eminence of clustering by generating the optimal clustering with maximum performance. The CACONET obtains better outcomes on the basis of number of clusters, and intracluster distance against the Multi Objective Particle Swarm Optimization (MOPSO) and Comprehensive Learning PSO (CLPSO) [8]. Another bio-inspired clustering algorithm dragonfly optimizer (CAVDO) [9] is developed to obtain better results as scalability and efficiency against CLPSO and ACO in VANET. Grey Wolf Optimization based Clustering Network (GWOCNET) is specific approach which is developed on the basis of grey wolf`s communal activities and hunting device to obtain optimal clusters by utilizing node`s velocity in VANET. GWOCNET generates better outcomes than CLPSO and MOPSO [10]. In the above study, several clustering approaches are developed on various networks to enhance the quality of clustering and data restoration. Multiple bio-inspired optimization algorithms like CLPSO, MOPSO, CACONET, GWOCNET etc. are developed for optimal clustering, but no one can solve all optimization issues. So we implemented a new Grasshopper Optimization based Clustering Algorithm (GOCA) enthused by grasshoppers. It obtains quick searching exploration and rapid junction exploitation. Proposed GOCA is developed for clustering of UAVs and results are analyzed with other clustering approaches CLPSO, GWOCNET, and CACONET in terms of the packet delivery ratio (PDR), cluster lifetime, end to
end delay and consumed energy.
2.
P
ROPOSEDG
RASSHOPPERO
PTIMIZATION BASEDC
LUSTERINGA
LGORITHM(GOCA)
Grasshopper Optimization based Clustering Algorithm (GOCA) evaluates the cluster head UAV`s and their member UAV`s in terms of UAV`s Participation which is a combination of neighbourhood involvement, velocity and energy of UAVs. The position coordinates of UAVs are taken through GPS. Cluster is generated by following steps:
________________________
Ankur Pandey, Research Scholar, Department of Computer Science & Engineering, University Institute of Technology, RGPV, Bhopal 462023, India: [email protected]
Dr. Piyush Kumar Shukla, Department of Computer Science & Engineering, University Institute of Technology, RGPV, Bhopal 462023, India; [email protected]
Dr. Ratish Agrawal,Department of Information Technology, University Institute of Technology, RGPV, Bhopal 462023, India, [email protected] Ankur Khare, Computer Science, Institute for Excellence in Higher
Education, Kaliyasot Dam, Kolar Road, Bhopal 462016, India;
3732
2.1. UAV`s Neighbourhood Involvement
A UAV is obsessed as cluster head having maximum number of neighbours in FANET. Therefore, energy consumption in information interchange is decreased with maximum neighbours. Every UAV transmits a HELLO packet to initiate itself to the neighbours, and then each UAV obtains its neighbourhood involvement (number of
neighbours in its transmission range,
N
(
u
)
) after sending all the packets. UAV`s neighbourhood involvement is obtained by using eq. 1.
u u U uU N u dis ceuu transmission range
I , _ ) , ( tan ) ( (1)
2.2. UAV`s Velocity
A UAV is obsessed as cluster head having minimum velocity as contrast with neighbours and moving with similar speed and direction as neighbours in FANET. UAV`s velocity
_
,
1_
N y x x
UAVs
Velocity
Velocity
UAVs
is obtainedby eq. 2. (x = 1 to number of nodes and y = 1 to total time)
)
1
)
4
.
0
(
*
2
(
*
))
1
,
(
_
*
(
)
1
,
(
_
)
,
(
_
Velocity
x
y
UAVs
velocity
x
y
UAVs
velocity
x
y
rand
UAVs
(2)
2.3. UAV`s Energy
A UAV is obsessed as cluster head having greatest remaining energy and smallest addicted energy among neighbour UAVs in FANET. The UAV`s energy
_
,1
1_
Energy
x
UAVs
Energy
x NUAVs
is obtainedby eq. 3.
x u x x
N
Energy
Energy
UAVs
_
,1
(3)
Here
Energy
x= energy ofx
th UAV andx
u
N
= number ofneighbours of
x
th UAV. 2.4. UAV`s ParticipationUAV`s Participation is calculated for every UAV by utilizing
all three factors (
I
U, UAV`s Velocity and UAV`s Energy) by eq. 4.
Energy
UAVs
w
Velocity
UAVs
w
I
w
ion
Participat
s
UAV
U_
1
*
_
1
*
*
`
1 2 3(4)
Where
w
1,w
2 andw
3are weights of factors,therefore
w
1
w
2
w
3
1
.2.5. Generation of cluster head and their member UAVs The UAV`s Participation of all UAVs are analyzed against a threshold value and If it is to be found that UAV`s Participation value of UAV is higher than a threshold value, then that UAV is obsessed as a cluster head. After that GOCA is initiated to find out the optimal members of cluster head UAVs on the basis of UAV`s position (obtains from GPS) and UAV`s participation.
Grasshopper Optimization (GO) algorithm is a nature-inspired approach which performs optimization using grasshopper swarms behavior and utilizes for increasing the harvest generation and cultivation in both nymph (eat
plants in their path by moving like to progress cylinder) and adulthood (rapidly move long distance for eating the crops). The exploration and exploitation are two search processes utilized by GO to move quickly in local environment. GOCA is performed by using following steps.
Start
Step1. Mathematical initiation of GOA by defining initial values of generation, population, fitness function, and location of all grasshoppers (denotes clusters in FANET), and search agents (denotes the UAV`s participation in FANET) to capriciously value.
Step2: The grasshopper swarming nature is obtained by using arithmetical model to generate the location of every grasshopper by eq.5.
a a
a
a
SOI
GTF
WNA
LOC
(5)
Here, LOCa = a th
grasshopper location, SOIa = social interface, GTFa = a
th
grasshopper gravitational force, WNAa = advection of wind.
Step 3: To improve the uncertainty of the eq. 5, it can be modified
as
LOC
a
n
1
*
SOI
a
n
2
*
GTF
a
n
3
*
WNA
a,where
n
1
,n
2
, andn
3
are capricious numbers in [0, 1].
N a b b ab aba
soi
d
d
SOI
1
)
(
(6) Here, dab = distance between the a
th
and bth grasshopper, obtained as dab=|locb−loca|, soi is a social interface power
function ab a b ab
d
lo
lo
d
is a unit vector from the ath
to bth grasshopper.
Step 4: The soi social interface power function is obtained by eq. 7.
r r
A
e
e
I
r
soi
)
(
(7)Here,
I
A= intensity of attraction and
= length magnitude of attraction. The function soi denotes the attraction or repulsion social interaction of grasshoppers.Step 5: The gravitational force GTFa is obtained by eq. 8.
ga
g
e
GTF
(8)Here, g=universal constant of gravitation and
g
e
= unit vector (in earth center direction).Step 6: The advection of wind WNAa is obtained by eq. 9.
3733 Here
= drift constant and
wn
e
= unit vector near the wind.Step 7: Putting the values of SOIa, GTFa, and WNAa in eq. (5), then equation can be modified as follows.
g wnab a b N
a b b
a b
a
g
e
e
d
loc
loc
loc
loc
soi
LOC
1
)
(
(10)
Here, r
r
A
e
e
I
r
soi
)
(
, N represents number ofgrasshoppers. If the exploitation of swarm is taken in free space, then eq. (10) is modified to imitate the grasshoppers interface.
N da b
b ab
a b d a d b d
d
a TR
d loc loc loc loc soi LWB UPB
c c LOC
1
) (
2
(11)
Here, UPBd = upper bound and LWBd = lower bound in the
Dth magnitude,
d
TR
= target Value of the Dth dimension. Until now, the gravitational force component (GTF) is not utilized and let the advection of wind (WNA) is constantly inthe path of a target
d
TR
. Adaptive parameter c is utilized two times in eq. 11 (first c denotes the inertial weight and used for exploration and exploitation of absolute swarm in the order of the target and second c is utilized to reduce the desirability, relieve and revolting region of grasshoppers. Eq. 11 is obtained to generate the next position of grasshoppers on the basis of the existing position.
i
N
c
c
c
c
max minmax
(12)
Here
c
max= maximum value,c
min = minimum value, andi
N
= maximum number of iterations. The best target position is modified by eq. 11 and distances among grasshoppers are normalized in every iteration and c is calculated by eq. 12. Position modifying is continued yet the gratification of an end situation and at last provided the best value of position and fitness of global optimal of the target in a search space.In GOCA, every cluster is defined as grasshoppers and each UAV`s Participation is defined as search agents. So, every grasshopper is modifying their positions (locations) based on fitness value. The flow chart of proposed GOCA is shown in Fig. 1.
GOCA Clustering Algorithm
INPUT:
N
r=number of iterations,K
=Number of clusterheads,
P
GA= grass hopper population,N
G=number ofgrasshoppers,
N
sa =number of search agents,N
=number of UAV`s,N
UP= UAV`s Participation.OUTPUT: cluster centroids (
TB
sa) with target best optimum value.Start
Evaluate
I
U using eq. 1Evaluate UAV`s velocity using eq. 2
Obtain UAV`s energy using eq. 3
Obtain UAV`s Participation by combining
I
U , UAV`s velocityand UAV`s energy using eq. 4
Select K cluster head UAVs having maximum UAV`s Participation values
higher than a threshold value
WHILE an end situation is not delighted
FOR each cluster
Provided initial values of the grasshopper Swarm location
a
loc
(a=1,2,3,...n)Provided initial values for
c
max,
c
min, andN
r. Calculate the fitness of all search agentssa
TB
=best target search agentWHILE (a <
N
r)Update c by eq. 12.
FOR all search agents
Calculated normalized distance among grasshoppers
Update the position of existing search agent by eq. 11.
If existing search agent jumps outside the limitations, then take it back
END FOR
Modify
TB
sa if better position generates a=a+1END WHILE
Return
TB
saEND FOR
Choose
TB
sa as the new cluster centroid3734 Start
Select K cluster head UAVs having maximum UAV`s Participation Values
Initialize GOCA to find cluster member UAVs
End
Obtain UAV`s Participation by combining Iv, UAV`s velocity and UAV`s energy
Evaluate UAV`s velocity and UAV`s energy Evaluate Iv using eq. 1
Fig1. Flow Chart of Proposed GOCA
3. Result and Analysis
The proposed GOCA is implemented and analyzed in terms of several parameters (table 1) with MATLAB 2018a environment.
Table1: Parameters for Experiment
Parameters Values
Number of UAV`s 20, 30, 40, 50, 60 Size of Network 2 km * 2 km
UAV`s Velocity 0 – 30 m/s (randomly) Transmission Range 100 – 600 m Weights (W1, W2, W3) 0.33, 0.33, 0.34
Population Size 100 Number of iterations 100
We analyzed the performance of the GOCA based on packet delivery ratio (PDR), cluster lifetime, end to end delay and consumed energy and shown that the better performance of GOCA against other approaches like CLPSO, CACONET, and GWOCNET.
3.1. Packet Delivery Ratio (PDR)
PDR is the fraction of sending information taken from the base station to the all information transmitted by total cluster member UAVs by their cluster head UAVs in a FANET.
Fig.2. Packet Delivery Ratio versus number of nodes for
network size 2 km X 2 km
Fig 3. Packet Delivery Ratio versus Transmission Ranges
for network size 2 km X 2 km
It describes that the proposed GOCA generates the maximum PDR value of 93% for 2 km X 2 km network (fig. 2 & 3) in terms of the number of UAVs and transmission ranges of UAVs against the CLPSO (79% & 77%), CACONET (81% & 79%), and GWOCNET (83% & 81%), PDR value is enhanced with enhancing the number of UAVs because of more UAVs send the packets. PDR value is also enhanced by increasing the transmission ranges due to less chance of packet drop with minimum UAVs.
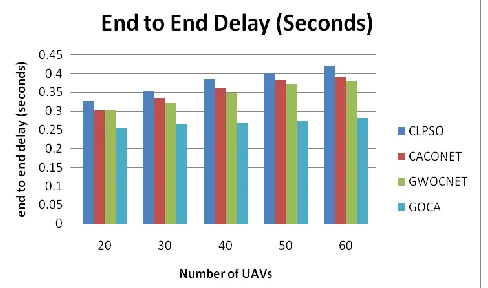
3.2. End to End Delay
End to end delay uses the time to discover a route and transmit the information in FANET. Optimal clustering has minimum value of it.
Fig 4. End to End Delay versus number of nodes for
3735
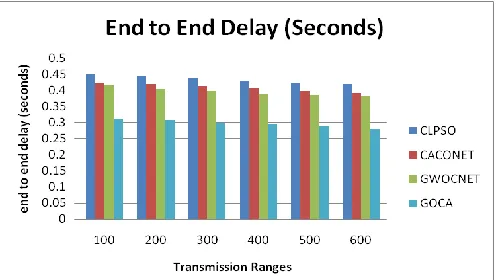
Fig 5. End to End Delay versus Transmission Ranges for
network size 2 km X 2 km
It shows that the proposed GOCA calculates the minimum end to end delay (seconds) value of 0.2712 for 2 km X 2 km network (fig. 4 & 5) in terms of the number of UAVs and transmission ranges of UAVs against the CLPSO (0.4235 & 0.4515), CACONET (0.3891 & 0.4033), and GWOCNET (0.3934 & 0.4344). End to end delay value is enhanced with enhancing the number of UAVs because of more UAVs to send the packets. Its value is also reduced with increasing the transmission ranges due to packet transmission by minimum numbers of UAVs.
3.3. Cluster Lifetime
The time from generation to destruction of a cluster is known as cluster lifetime. Optimal clustering has maximum cluster lifetime to decrease the overhead of maintenance in FANET.
Fig 6. Cluster Lifetime versus number of nodes for network
size 2 km X 2 km
Fig 7. Cluster Lifetime versus Transmission Ranges for
network size 2 km X 2 km
It represents that the proposed GOCA calculates the maximum cluster lifetime (seconds) value of 1925 for 2 km X 2 km network (fig. 6 & 7) in terms of the number of UAVs and transmission ranges of UAVs against CLPSO (795 & 867), CACONET (1027 & 1164), GWOCNET (893 & 984), and ECRNET (1243 and 1375). Its value is reduced by enhancing the number of UAVs because of more UAVs to modify FANET topology. Its value is also enhanced by increasing the transmission ranges because of increase the number of neighbours UAVs.
3.4. Consumed Energy
Consumed energy is explained as the UAV`s energy utilize for transferring the data during a specific time period over FANET. Optimal clustering has Minimum energy consumption for increasing the stability and lifetime of cluster of UAVs in FANET.
Fig 8. Consumed Energy versus number of nodes for
network size 2 km X 2 km
Fig 9. Consumed Energy versus Transmission Ranges for
network size 2 km X 2 km
3736
4. Conclusion
Unmanned aerial vehicles (UAVs) can be necessarily utilized in rescue and disaster operations with limited battery power in FANET. The issues of small flying time and infertile routing because of high velocity will be shortened by using efficient Grasshopper Optimization Clustering Algorithm (GOCA). GOCA is implemented for clustering and outcomes are compared with other optimization approaches like CLPSO, CACONET, and GWOCNET in terms of several performance parameters. The experimental outcomes are illustrated that the GOCA has been obtained better performance than CLPSO, CACONET, and GWOCNET based on packet delivery ratio (PDR), cluster lifetime, end to end delay and consumed energy. In future, the clustering approach in FANET is also developed by utilizing other bio-inspired techniques like Harris-hawk Optimizer, Fruit Fly optimization, and Salp Swarm Algorithm for logical studies.
REFERENCES
[1] A V Leonov, and G A Litvinov, ―Simulation-Based Packet Delivery Performance Evaluation with Different Parameters in Flying Ad-Hoc Network (FANET) using AODV and OLSR‖, International Conference Information Technologies in Business and Industry, IOP Conf. Series, Journal of Physics, pp-1-16, 2018. (doi :10.1088/1742-6596/1015/3/032178)
[2] Abbas Karimi, Abbas Afsharfarnia, Faraneh Zarafshan, and S. A. R. Al-Haddad, ―A Novel Clustering Algorithm for Mobile Ad Hoc Networks Based on Determination of Virtual Links’ Weight to Increase Network Stability‖, Scientific World Journal, Hindawi, pp-1-11, 2014. (http://dx.doi.org/10.1155/2014/432952)
[3] Alaa Taima Albu-Salih, Seyed Amin Hosseini Seno and Saad Jasim Mohammed, ―Dynamic Routing Method over Hybrid SDN for Flying Ad Hoc Networks‖, Baghdad Science Journal, Vol. 15, no.
3, pp-361-368, 2018.
(DOI:http://dx.doi.org/10.21123/bsj.2018.15.3.0361 )
[4] Armir Bujari, Carlos T. Calafate, Juan-Carlos Cano, Pietro Manzoni, Claudio E. Palazzi and Daniele Ronzani, ―A Location-AwareWaypoint-Based Routing Protocol for Airborne DTNs in Search and Rescue Scenarios‖, Sensors, MDPI, Vol. 18, pp-1-14, 2018. (doi:10.3390/s18113758)
[5] Bongjae Kim, Hong Min, Junyoung Heo and Jinman Jung, ―Dynamic Computation Offloading Scheme for Drone-Based Surveillance Systems‖, Sensors, MDPI, Vol. 18, pp-1-10, 2018. (doi:10.3390/s18092982)
[6] Dan Radu, Adrian Cretu, Benoît Parrein, Jiazi Yi, Camelia Avram, and Adina Astilean, ―Flying Ad Hoc Network for Emergency Applications connected to a Fog System‖, HAL, pp-1-13, 2018. (https://hal.archives-ouvertes.fr/hal-01763827) [7] Farhan Aadil, Ali Raza, Muhammad Fahad Khan,
Muazzam Maqsood, Irfan Mehmood, and Seungmin Rho, ―Energy Aware Cluster-Based Routing in Flying Ad-Hoc Networks‖, Sensors,
MDPI, Vol.18, pp-1-16, 2018. (doi:10.3390/s18051413)
[8] Farhan Aadil, Khalid Bashir Bajwa, Salabat Khan, Nadeem Majeed Chaudary, and Adeel Akram, ―CACONET: Ant Colony Optimization (ACO) Based Clustering Algorithm for VANET‖, PLOS ONE, pp-1-21, 2016.
[9] Farhan Aadil, Waleed Ahsan, Zahoor Ur Rehman, Peer Azmat Shah, Seungmin Rho, and Irfan Mehmood, ―Clustering algorithm for internet of vehicles (IoV) based on dragonfly optimizer (CAVDO)‖, Journal of Supercomputing, Springer, pp-1-27,2018.
[10]Muhammad Fahad, Farhan Aadil, Zahoor-ur- Rehman, Salabat Khan, PeerAzmat Shah, Khan Muhammad, Jaime Lloret, Haoxiang Wan, Jong Weon Lee, and Irfan Mehmood, ―Grey wolf optimization based clustering algorithm for vehicular ad-hoc networks ‖, Computers and Electrical Engineering, Elsevier, pp-1-19, 2018. [11]Muhammad Asghar Khan, Inam Ullah Khan,
Alamgir Safi and Ijaz Mansoor Quershi, ―Dynamic Routing in Flying Ad-Hoc Networks Using Topology-Based Routing Protocols‖, Drones, MDPI, Vol. 2, pp-1-15, 2018. (doi:10.3390/drones2030027)
[12]Pedro Cumino, Wellington Lobato Junior, Thais Tavares, Hugo Santos, Denis Rosário, Eduardo Cerqueira, Leandro A. Villas and Mario Gerla, ―Cooperative UAV Scheme for Enhancing Video Transmission and Global Network Energy Efficiency‖, Sensors, MDPI, Vol. 18, pp-1-17, 2018. (doi:10.3390/s18124155)
[13]Rico Valentino, Woo-Sung Jung and Young-Bae Ko, ―A Design and Simulation of the Opportunistic Computation Offloading with Learning-Based Prediction for Unmanned Aerial Vehicle (UAV) Clustering Networks‖, Sensors, MDPI, Vol. 18, pp-1-14, 2018. (doi:10.3390/s18113751)
[14]Sara Arabi, Essaid Sabir, Halima Elbiaze and Mohamed Sadik, ―Data Gathering and Energy Transfer Dilemma in UAV-Assisted Flying Access Network for IoT‖, Sensors, MDPI, Vol. 18, pp-1-25, 2018. (doi:10.3390/s18051519)
[15] S
haojie Wen and Chuanhe Huang, ―Delay-Constrained Routing Based on Stochastic Model for Flying Ad Hoc Networks‖, Mobile Information Systems, Hindawi, pp-1-12, 2018. (https://doi.org/10.1155/2018/6056419)