A Rule-based System for Programming Self-Organized Sensor and Actor Networks
28
0
0
Full text
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
(13)
(14)
(15)
(16)
(17)
(18)
(19)
(20)
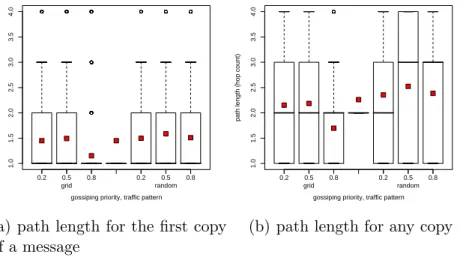
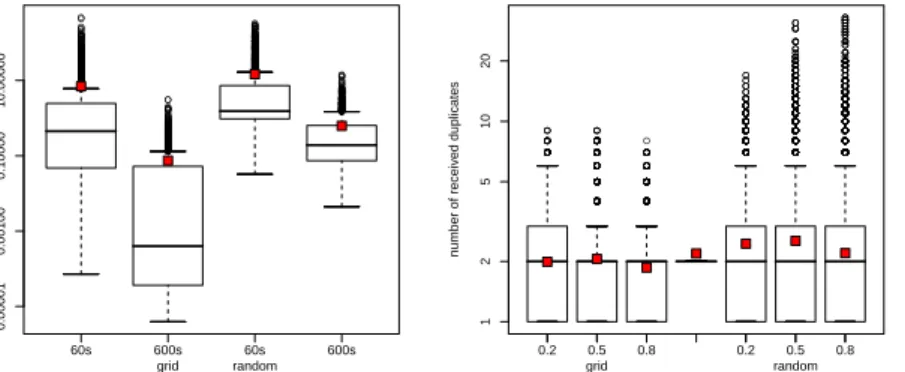
Figure

+4
Related documents
Incident light microscopy allows practitioners the ability to identify various types of organic components and demonstrates that solid bitumen is the dominant organic matter
The lift to drag ratio increases as the angle of attack increased on both wings, for rear wing the lift to drag ratio is reduced when compared to that of front wing due to
In this PhD thesis new organic NIR materials (both π-conjugated polymers and small molecules) based on α,β-unsubstituted meso-positioning thienyl BODIPY have been
Draw a broken line separating the octave into two sets of four lines (quatrains). The rhyme scheme of the octave follows the pattern abba/abba. The rhyme scheme of the sestet
Advanced Quantitative Reasoning is designed to reinforce, build on, and solidify students’ working knowledge of Algebra 1,2, Geometry 1,2, and Algebra 3,4; develop
(2011) Prevalence and Risk Factors for Vitamin C Deficiency in North and South India: A Two Centre Population Based Study in People Aged 60 Years and Over.. This is an
Correspondingly, research studies in different populations indicate that spirituality appears to be a protective factor against depression ( Koenig, 2009 ) and loneliness (
While existing crime studies mainly focusing on tree canopy for the measurement of greenspace, this current study considered different parts of trees (greenspace) and
