International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 1, January 2013)
640
A Comparative Study of Tuning of PID Controller using
Evolutionary Algorithms
Pranay Lahoty
1, Girish Parmar
21,2Department of Electronics Engineering, Rajasthan Technical University, Kota -324022(India)
Abstract— This paper presents modern optimization methods for determining the optimal values of proportional-integral-derivative (PID) controller parameters for an unstable system. The main objective is to obtain a fast and stable system by tuning of the PID controller using Genetic Algorithm and Particle Swarm Optimization algorithm. The simulation is done using MATLAB. The result is compared in terms of system transient characteristics and performance index. The obtained results using Evolutionary algorithms are also compared with PID tuning using conventional method like Ziegler Nichols tuning method. The results shows that tuning the PID controller using Evolutionary tuning methods provides fast and stable system with low overshoot and reduces the performance index (ISE).
Keywords—GA, ISE, PID, PSO, ZN
I. INTRODUCTION
A controller is a device which monitors and affects the operational conditions of a given dynamical system. The operational conditions are typically referred to as output variables of the system which can be affected by adjusting certain input variables. Controllers are required for controlling the given plant so that the plant can perform according to our requirements. The PID controllers are widely used in industrial applications to provide optimal and robust performance for stable, unstable and nonlinear processes [1]. Controllers must be simple and of low order so that easy analysis and required change in the system can be done. The control system performs poor in characteristics and even it becomes unstable, if improper values of the controller tuning constants are used [2]. So it becomes necessary to tune the controller parameters to achieve good control performance with the proper choice of tuning constants. The basic function of controller is to use a proposed tuning algorithm and to maintain the output in the desired or required range of output. Setting of the proportional, integral and derivative values of a controller to get the best possible control for a process using a tuning algorithm is called tuning of a PID controller [3].
In this paper, a PSO based tuning approach is used to design a PID controller for an unstable system. Obtained results are compared with other existing techniques in terms of system transient characteristics and performance index.
II. PROBLEM FORMULATION
The modelling of a high performance drilling machine includes the modelling of the feed drive system, the spindle system and the cutting process. The overall system for a drilling machine was modelled as a third order system with transfer function is given as [13]:
( )
( )
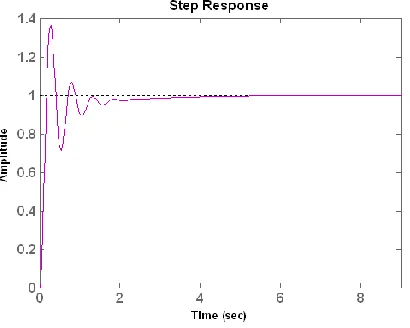
The step response of the closed loop system with unity feedback is shown in Fig.1.
Fig.1 Step Response of the System in Closed Loop with unity feedback
The response of the system shows that it’s an unstable system. System Transient characteristics cannot be measured. A PID controller has to be designed to improve the system transient characteristics like peak overshoot, settling time, rise time, peak amplitude and steady state value of the system. For this unstable system, tuning of the PID controller is done using Ziegler Nichols tuning method, Genetic Algorithm and Particle Swarm Optimization Algorithm to obtain the optimal values for the PID controller.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 1, January 2013)
641
TABLEI
TRANSIENT CHARACTERISTICS OF THE CLOSED LOOP SYSTEM
Time Domain Specifications Closed Loop System
Rise Time (sec.) N/A
Peak Amplitude -
Peak Time (sec.) -
% overshoot -
Settling Time (sec.) -
Steady State Value INF
III. ZIEGLER NICHOLS TUNING METHOD
A very useful empirical tuning formula was proposed by Ziegler and Nichols in early 1942. The tuning formula is obtained when the plant model is given by a first-order plus dead time (FOPDT) which can be expressed by [14]
( ) ( )
The Ziegler-Nichols step response and frequency response methods are the classical tuning methods for PID controllers. They were presented already in 1942, but they are still widely used in the process industry as the basis for controller tuning. The step response method is based on an open-loop step response test of the process, hence requiring the process to be stable. The unit step response of the process is characterized by two parameters, L and T. These are determined by drawing a tangent line at the inflexion point, where the slope of the step response has its maximum value. The intersections of the tangent and the coordinate axes give the process parameters and these are used in calculating the controller parameters.
The frequency response method is also based on describing the process with two parameters that are the crossover gain, Kc, and the crossover period, Tc. For determining these parameters, the plant is controlled with a P-controller, and its gain is increased until the system oscillates critically. The gain yielding marginal stability is the ultimate gain, and the ultimate period is the period of oscillation at this gain. If the frequency response of the plant model can be measured, the ultimate gain Kc and the crossover frequency ωc can be read from the nyquist plot of the system.
The parameters for the P, PI and PID controllers obtained from the Ziegler-Nichols frequency response method are shown in Table II.
TABLEIII
ZIEGLER NICHOLS TUNING FORMULAE
Controller from step response from frequency response
type Kp Ti Td Kp Ti Td
P 1/a - - 0.5Kc - -
PI 0.9/a 3L - 0.4Kc 0.8Tc -
PID 1.2/a 2L L/2 0.6Kc 0.5Tc 0.12Tc
dc gain of the system,
time before inflexion point,
time after inflexion point,
Inflexion point=point of change in response curve, crossover frequency,
crossover gain
Crossover period ( )
ZN formulae parameter ( )
IV. GENETIC ALGORITHM
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 1, January 2013)
642 The selection mechanism for parent chromosomes takes the fitness of the parent into account. This will ensure that the better solution will have a higher chance to procreate and donate their beneficial characteristic to their offspring [6].
V. PARTICLE SWARM OPTIMIZATION
Particle Swarm Optimization (PSO) technique appeared as a promising algorithm for handling the optimization probl- ems [7]. PSO is a population based stochastic optimization technique, inspired by social behavior of bird flocking or fish schooling. In PSO, initialization of population of random solutions is done and search for the optimal by updating generations. PSO has no evolution operators such as crossover and mutation. One of the most promising advantage of PSO is its algorithmic simplicity, as it uses a few parameters and easy to implement. In PSO, the potential solutions, called particles, fly through the problem space by following the current optimum particles [8],[9].
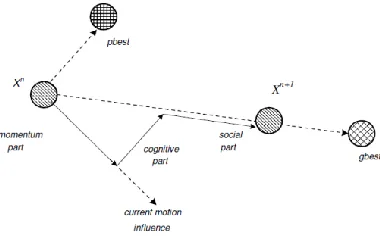
The PSO method is a population based search algorithm where each individual is referred to as particle and represents a candidate solution. Each particle flies through the search space with an adaptable velocity that is dynamically modified according to its own flying experience and also the flying experience of the other particles [10],[11]. In PSO, each particle strives to improve itself by imitating traits from their successful peers. Further, each particle has a memory and hence it is capable of remembering the best position in the search space ever visited. The position corresponding to the best fitness is known as Pbest and the overall best out of all the particles in
the population is called Gbest [12].
[image:3.612.326.562.176.321.2]
Fig.2 Position Updates in PSO using 2-Dimensional Space
VI. SIMULATIONS AND RESULTS
[image:3.612.349.554.465.636.2]A MATLAB simulink model has developed for the simulation and performance index is calculated as Integral Square Error as Fig.3.
Fig. 3 Simulink Model for tuning of PID controller using ISE
The system transient characteristics and ISE obtained by the PSO algorithms is compared with the calculated values obtained by using GA and ZN method. Following results were obtained using different tuning algorithms.
A. Ziegler Nichols Tuning Method
First the system G1(s) was tuned using ZN method [14].
[image:3.612.76.266.517.635.2]The values of obtained PID parameters are Kp=0.5078, Ki=1.6429 and Kd=0.0392. Step response of the system was obtained as Fig.3.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 1, January 2013)
643
B. Genetic Algorithm
Again the system G1(s) was tuned using GA [5]. The
values of obtained PID parameters are Kp=0.9483, Ki=0.7389 and Kd=0.1028. Step response of the system was obtained as Fig.4.
Fig.4 Step response of the system G1(s) using GA method Calculated performance index (ISE) was 0.1241. As we can see that there is slight more reduction in system transient characteristics than ZN method.
C. Particle Swarm Optimization
Now the system G1(s) was tuned using PSO [13]. The
[image:4.612.65.269.194.354.2]values of obtained PID parameters are Kp=0.9109, Ki=0.5269 and Kd=0.0605. Step response of the system was obtained as Fig.5.
Fig.5 Step response of the system G1(s) using PSO
Calculated performance index (ISE) was 0.1391. As we can see that the response is fast and system is stable. There is reduction in system transient characteristics and ISE was also improved.
The transient characteristics of the system by using above methods were compared as Table III.
TABLEIIIII
COMPARISON IN TRANSIENT CHARACTERISTICS OF THE SYSTEM
Transient
Characteristics ZN GA PSO
Rise Time (sec.) 0.15s 0.0974s 0.113s
Peak Amplitude 1.42 1.28 1.36
Peak Time (sec.) 0.364s 0.234s 0.282s
% overshoot 41.70% 28% 36.20%
Settling Time (sec.) 1.61s 1.61s 2.56s
Steady State Value 1 1 1
The Comparison of the performance index obtained from ZN method, GA and PSO algorithm are given in the Table IV.
TABLEIV
COMPARISON IN PERFORMANCE INDEX OF THE SYSTEM
Performance Index ZN GA PSO
Integral Square Error 0.2070 0.1241 0.1393
VII. CONCLUSIONS
In this paper, a designing method aiming at enhancing the PID control for unstable processes is proposed. It is shown practically that there is considerable improvement in the system transient characteristics in terms of lesser rise time, peak time, settling time, peak overshoot and peak amplitude. Performance index (ISE) was also reduced. Results are more refined in modern control tuning algorithms than conventional control tuning algorithm. Due to all these improved system transient characteristics, system started with reduced amount of information and robustness of the system also increased.
REFERENCES
[1] A. Margalith and H.W. Mergler, ―Optimum Setting for Proportional Controller‖, IEEE Transations on Industrial Electronics, Vol. IE-29, No. 2, May 1982.
[2] M. Zhuang and D.P. Atherton, ―Automatic tuning of optimum PID controllers‖, IEE Proceedings-D, Vol. 140, No. 3, May I993. [3] A. Visioli, ―Optimal Tuning of PID controllers for integral and
unstable processes‖, IEE Proceedings online no. 20010197, IEE, 2001.
[4] R. Vilanova and P. Balaguer, ―ISA-PID Controller Tuning: A combined min-max / ISE approach‖, Proceedings of the 2006 IEEE International Conference on Control Applications Munich, Germany, October 4-6, 2006.
[image:4.612.65.270.490.654.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 1, January 2013)
644
[6] D.B. Fogel, ―An Introduction to Simulated Evolutionary Optimization‖, IEEE Transa-ction on Neural Network, Vol. 5, No. 1, January 1994.
[7] M. Clerc and J. Kennedy, ―The Particle Swarm—Explosion, Stability, and Convergence in a Multidimensional Complex Space‖, IEEE Transactions on Evolutionary Computation, Vol. 6, No. 1,February 2002.
[8] L. Zhou, Y. Fei and W. Youbo, ―PSO Algorithm based Online Self-Tuning of PID Controller‖, 2007 International Conference on Computational Intelligence and Security.
[9] A. Jalilvand, A. Kimiyaghalam, A. Ashouri and M. Mahdavi, ―Advanced Particle Swarm Optimization-Based PID Controller Parameters Tuning‖, Proceedings of the 12th IEEE International Multitopic Conference, December 23-24, 2008.
[10] B. Nagaraj , S. Subha and B. Rampriya, ―Tuning Algorithms for PID Controller Using Soft Computing Techniques‖, IJCSNS International Journal of Computer Science and Network Security, VOL.8 No.4, April 2008.
[11] Y.B. Wang, X. Peng, B.Z. Wei, ―A new Particle Swarm optimizati- on based on Auto Tuning of PID Controller‖, Proceedings of the Seventh International Conference on Machine Learning and Cybernetics,Kunming,12-15 July 2008.
[12] M.I. Solihin, L.F. Talk and M.L. Kean, ―Tuning of PID Controller using Particle Swarm Optimization (PSO)‖, Proceeding of the International Conference on Advanced Science, Engineering and Information Technology 2011.
[13] S.M. Giriraj Kumar, D. Jayaraj and A.R. Kishan, ―PSO based Tuning of a PID Controller for a High Performance Drilling Machine‖, ©2010 International Journal of Computer Applications (0975 - 8887) Volume 1 – No. 19.
[14] D. Xue, Y.Q. Chen and D.P. Atherton, ―Linear Feedback Control‖, Copyright ©2007 by the Society for Industrial and Applied Mathematics.