AVAILABILITY EVALUATION OF A
TRAFFIC SIGNAL SYSTEM UNDER
PRE-EMPTIVE REPEAT REPAIR
Neelam Sharma
Krishna Institute of Engineering and Technology 13 Km Stone, Ghaziabad-Meerut Road-201206 (u.p)
Deepankar Sharma
D.J Engineering College Modinagar Ghaziabad (u.p)
ABSTRACT
In this paper we consider a traffic signal system for its availability evaluation based on three colour signals, namely red, green and yellow. The system has to wait for repair in case of environmental failure otherwise the repair facilities are always available. All the failures and waiting rate follow exponential time distribution whereas all repairs follow general time distribution. Pre-emptive repeat policy has been adopted for repair purpose. The red and green colour signals pre-empt in repair over yellow colour signal.
Since, the system under consideration is of Non-Markovian nature, the supplementary variables technique has been used.
Key words: Availability function, reliability function and M.T.T.F.
INTRODUCTION:
The most comman use of these systems is to manipulate traffic signals in the path of an emergency vehicle.Deepankar Sharma (2) had considers a system Stochastic Behaviour of suger plant under Pre-emptive Resume Repair Man and cybernetics (3) discussed the transportation systems.Kontolean and Kontolean (4) had considered a system subject to partial and catastrophic failures to be repaired at a single service station and assumed exponential distribution for repair. Mittal and Gupta(5) considered a standby redundant system and two types of failures to be repaired at a single service station with general repair time distribution under Pre-emptive resume repair Discipline incorporating environmental effects. Further Gupta and Agarwal (6) developed a model with two types of failure under general repair time distribution and under different repair discipline.
Simillay Mittal, S.K .Sharma Deepankar and Neelam (7) Evaluate Profit Estamation for A Standby
Redundancy complex System under Pre-emptive Repeat Repair.So the authors have initiated the study keeping in mind and considered a traffic signal system for its availability evaluation.
The considered system is based on three colour signals, namely red, green and yellow. On failure of red or green colour signal the whole system goes to failed state while on failure of yellow colour signal the system works in reduced efficiency state. The whole system can also fail due to environmental reasons like heavy raining, storm etc. The system has to wait for repair in case of environmental failure otherwise the repair facilities are always available. All the failures and waiting rate follow exponential time distribution whereas all repairs follow general time distribution. Pre-emptive repeat policy has been adopted for repair purpose. The red and green colour signals pre-empt in repair over yellow colour signal. In this repair discipline, repair of yellow colour signal prior to start of repair of red and green colour signal, goes waste and when we come back to yellow colour signal (after repairing green or red colour signal) its repair starts as a fresh.
ASSUMPTIONS:
The assumptions used in this chapter are the follows:
1. In the beginning, the whole system is operable.
2. All the failures and waiting follow exponential time distribution whereas all repairs follow general time distribution.
3. Nothing can fail from a failed state. Failures are s-independent. 4. Repaired system works like a new and never damages anything.
5. The whole system may also fail due to environmental reasons and it has to wait for repair, in this case. Otherwise repair facilities are always available.
6. Pre- emptive repeat policy has been adopted for repair purpose. Red and green colour signals pre-empt in repair over yellow colour signal.
NOTATIONS:
The nomenclature used in this chapter is as follows:
i
: Failure rate ofi
thcolour signal.
2 1, E
E
: Failure rates due to environmental reasons.
: Waiting rate for repair in case of environmental failure.
j
i
: First order probability that thi
repair will be repaired in the time interval
j
,
j
, conditioned that it was not repaired up to the time j.
t
P
0 : Pr {At time t, system is operable}.
j
t
P
i,
: Pr {At time t, system is suffering with thi
failure}.Elapsed repair time lies in the interval
j
,
j
.
j
t
P
iY,
: Pr {At time t, system is suffering withi
th failure while yellow colour signal has already failed}.Elapsed repair time lies in the interval
j
,
j
.
t
P
EW : Pr {At time t, system is failed due to environmental reasons and is waiting for repair}.
m
t
P
ER,
: Pr {At time t, system is failed due to environmental reasons and is ready for repair}. Elapsed repair time lies in the interval
m
,
m
.
s
P
: Laplace transform of functionP
t
.F
T
T
M
.
.
.
: Mean time to failure the considered system.
j
S
i :
j
j
dj
i
and
j
i
i
exp
.
,
.
j
D
i :1
S
(
j
)
/
j
,
i
and
j
i
G
G(
z
)
R
E(
m
)
Operable
R(
x
)
Failed State
)
(
y
Y
y
R)
(
x
R
Degraded
G
)
(
z
G
2
E
1
E
Fig-1 (Flow of States)
FORMULATION OF MATHEMATICAL MODEL:
By the elementary Probability considerations and continuity argument, we obtain the following difference-differential equations for the stochastic process:
0 0
0
,
,
1
P
t
P
x
t
x
dx
P
z
t
z
dz
dt
d
G G
R R
E Y G
R
0 0
,
,
P
y
t
y
dy
P
Rm
t
Em
dm
E Y
Y
…(1)
…(2))
,
0
(
t
P
R)
,
(
x
t
P
R)
,
0
(
t
P
YR
)
,
(
x
t
P
RY)
,
0
(
t
P
ER)
,
(
m
t
P
RE
)
,
0
(
t
P
G)
,
(
z
t
P
G)
(
t
P
EW)
,
0
(
t
P
Y)
,
(
y
t
P
Y) ( 0t
P
)
,
0
(
t
P
GY)
,
(
z
t
P
Y
,
0
t
z
P
z
t
z
G G…(3)
,
0
2
t
y
P
y
t
y
R
G
E
Y Y…(4)
,
0
t
x
P
x
t
x
Y R R
…(5)
,
0
t
z
P
z
t
z
Y G G
…(6)
t
P
t
P
t
P
t
E E YW
E
1 0
2
…(7)
,
0
t
m
P
m
t
m
R E E
…(8)Boundary conditions :
t
P
t
P
R0
,
R 0 …(9)
t
P
t
P
G0
,
G 0 …(10)
0 0
0
,
,
,
0
t
P
t
P
x
t
x
dx
P
z
t
z
dz
P
Y
Y RY
R GY
G…(11)
t
P
t
P
RY0
,
R Y …(12)
t
P
t
P
GY0
,
G Y …(13)
t
P
t
P
ER0
,
EW …(14)Initial conditions :
0
,
0
0
,
1
)
0
(
i
i
P
i…(15)
SOLUTION OF THE MODEL:
Taking Laplace transforms of equations (1) through (14) subjected to initial conditions (15), we obtain:
0 0
0
1
,
,
1
P
s
P
x
s
x
dx
P
z
s
z
dz
s
R
G
Y
E R
R G
G
0 0
,
,
s
y
dy
P
m
s
m
dm
y
P
Y
Y RE
E …(16)
,
0
s
x
P
x
s
x
R R …(17)
,
0
s
z
P
z
s
z
G G …(18)
,
0
2
s
y
P
y
s
y
R
G
E
Y Y …(19)
,
0
s
x
P
x
s
x
Y R R
…(20)
,
0
s
z
P
z
s
z
Y G G
…(21)
s
P
s
EP
s
EP
Y
s
W E
2 1 0
…(22)
,
0
s
m
P
m
s
m
R E E
…(23)
s
P
s
P
R0
,
R 0 …(24)
s
P
s
P
G0
,
G 0 …(25)
0 0
0
,
,
,
0
s
P
s
P
x
s
x
dx
P
z
s
z
dz
P
R YG GY R Y
Y
…(26)
s
P
s
P
R YY
R
0
,
…(27)
s
P
s
P
G YY
G
0
,
…(28)
s
P
s
P
WER
E
0
,
…(29)Thus, finally we have the following Laplace transforms of various system’s states (depicted in fig-1) probabilities
s
B
s
P
0
1
…(30)
D
s
s
B
s
P
R RR
It is interesting to note here,
Sum of equations (30) through (37) =
s
1
PARTICULAR CASE:
When all repairs follow exponential time distribution
In this case, we have obtained the various systems’ state probabilities from equations (30) through (37) by
substituting
S
i
j
i/
j
i
,
i
and
j
, as given below:
s
E
s
P
0
1
…(41)
R R R
s
s
E
s
P
…(42)
D
s
s
B
s
P
G GG
…(32)
s
B
s
A
s
P
YY
…(33)
D
s
s
B
s
A
s
P
Y R Y RR
…(34)
D
s
s
B
s
A
s
P
Y G Y GG
…(35)
A
s
s
s
B
s
P
WE E Y E2 1
1
…(36)
A
s
D
s
s
s
B
s
P
RE E Y E E2 1
…(37)where,
2
2
1
R R G G Y R G EE G R Y
s
D
s
S
s
S
s
D
s
A
…(38)
B
s
s
R
G
Y
E
RS
R
s
GS
G
s
1
A
s
S
s
s
E1
Y
E2 E
2
1
R R G G Y R G EY
S
s
A
s
S
s
A
s
S
s
…(39)
G G Gs
s
E
s
P
…(43)
s
E
s
C
s
P
Y Y
…(44)
R Y R Y Rs
s
E
s
C
s
P
…(45)
G Y G Y Gs
s
E
s
C
s
P
…(46)
C
s
s
s
E
s
P
WE E Y E2 1
1
…(47)and
E E Y E R Es
s
C
s
s
E
s
P
1
2 1 , …(48)AVAILABILITY OF THE SYSTEM:
We have
2 11
1
s
E G R Y E Y G R ups
s
P
Taking inverse Laplace transform, we obtain:
t
F
t
P
up1
exp
.
R G Y E1
F
exp
.
R G E
t
2
… (49)Where, Y E E Y
F
1 2 … (50)It is worth noticing that
P
up
0
1
Also,
P
down
t
1
P
up
t
… (51)RELIABILITY AND M.T.T.F. EVALUATION:
We have
Y E G Rs
R
11
s
Taking inverse Laplace transform, we get
Again, we know that M.T.T.F. =
lim
(
)
0R
s
s
Y E G
R
1
1
M.T.T.F.
… (53)NUMERICAL COMPUTATION:
For a numerical computation, let us consider the values:
,
07
.
0
R
G
0
.
06
,
Y
0
.
01
,
0
.
008
,
1
E
0
.
006
2
E
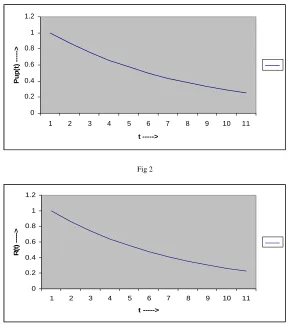
and t = 0, 1, 2,---.By using these values in equations (49), (52) and (53),. The corresponding graphs have been shown in fig-1, 2 and 3, respectively. By studying these figs., one can observe the changes in the various reliability measures w.r.t. time or some other parameter.
RESULTS AND DISCUSSION:
Laplace transform of probabilities of various system’s states, depicted in fig-1, have been derived. Availability, reliability and M.T.T.F. for the considered system have been obtained. The probabilities of various systems’ a particular case (when all repairs follow exponential time distribution) have also been computed to improve practical utility of the model. A numerical example together with its graphical illustration has also been mentioned in last to highlight important results of the work.
0 0.2 0.4 0.6 0.8 1 1.2
1 2 3 4 5 6 7 8 9 10 11
t --->
P
u
p
(t)
-
---->
Fig 2
0 0.2 0.4 0.6 0.8 1 1.2
1 2 3 4 5 6 7 8 9 10 11
t --->
R
(t)
--->
Fig-4
REFERENCES
[1] Sharma, Deepankar,Gupta, Amit and Garge.Ruchi, 2009.Stochastic Behaviour of Sugar Plant with2-out-of-3: Boilers and Pre-emptive
Resume Repair IJRRAS Vol1, Issue1 (october2009)
[2] Transportation Systems, 7(4), 2006, 551-564. 2008 IEEE International Conference on Systems, Man and Cybernetics (SMC 2008)
[3] Mittal, P.P., Sharma, Deepankar and Sharma, Neelam. 2006. `` Profit Estamation for A Standby Redundancy complex System under
Pre-emptive Repeat Repair. ``
[4] Emergency vehicle traffic signal Pre-emptive system.United states Patent and Trademark office Retrieved October 7, 2005.
[5] Gupta, P.P. and Agarwal, S.C.1983.A parallel redundant complex system With two types of failure under different repair discipline,
IEEE Trans.Reliability, Vol.R-32.
[6] Gupta, P.P. and Mittal, S.K.1979.Operational Availability of a multicomponent System with two types of failure and opportunistic
repairs incorporating Environmental effects under Preemptive Resume Repair Policy, Acta Cinecia Indica, Vol.Vm,(No.2):92-98.
[7] Kontolean, J.M. and Kontolean,N.1974.Reliability Analysis of a system subjected to Partial and Catastrophic Failures,IEEE Trans.On
Rel.,Vol-23:277-278.
[8] Bazovsky,1.,Reliability theory and Practice, Prentice-Hall Inc.,Englewood Califfs, New Jersey.
[9] Amstadter, B.L., Reliability Mathematics McGraw Hill Book Company, New Yark.
0
2
4
6
8
10
12
.001
.003
.005
.007
.009
.011
1
E
--->
M.
T.T.
F.
--->
R=0.02
R
=0.04
R
=0.06
R