GA BASED DESIGN FOR IMPROVING
STARTING TORQUE OF INDUCTION
MOTOR
P.S. PRAKASH
Assistant Professor
Department of Electrical Engineering Annamalai University, Tamil Nadu, INDIA
Email: [email protected]
P. ARAVINDHABABU
Professor of Electrical Engineering Annamalai University, Tamil Nadu, INDIA
Email: [email protected]
Abstract :
This paper presents a Genetic Algorithm (GA) based design methodology for maximizing the starting torque of Induction Motor (IM) . The GA is a heuristic search that mimics the process of natural evolution based on the mechanics of natural selection and natural genetics. A population of chromosomes, which encode candidate solutions to an optimization problem, migrates towards optimal solution by simulating Darwinian’s “the survival of the fittest” criterion. Among the number of design variables of the IM, seven variables are chosen as primary design variables and the GA based design methodology is built to optimize the chosen primary variables so as to obtain the global best design. The optimal design obtained by the proposed methodology for two IMs are presented with a view of illustrating the superiority.
Keywords: Induction Motor; Genetic Algorithm; Optimization. Nomenclature
i
ED equivalent decimal value of ithsub-string
) (x
f objective function to be minimized
i
FIT fitness function of ith chromosome
GA genetic algorithm )
(x
g a set of inequality constraints
ph
I phase current, A
IM induction motor
r
I equivalent rotor current, A
sc
I short circuit current per phase, A
max
Iter maximum number of iterations for convergence check
min"
" & "max"
minimum and maximum limits of the respective variables nbits number of binary bits in the sub-string
nd number of decision variables ODIM optimal design of IM PM proposed method
PS population size
SA simulated annealing SFL slip at full load, per unit
st
T starting torque, per unit
ph
V phase voltage, V
w weight constant of the penalty terms
i
x ith decision variable
Z impedance per phase
1. Introduction
Although squirrel-cage induction machines are widely used in the industry for their easy manufacturing and robustness, their applications in electrical transport systems such as subways and trains are limited due to inferior starting torque than those of permanent-magnet motors. In the light of the fact that the resistance of a squirrel-cage motor is fixed and small as compared to its reactance that is very large especially at the start, the frequency of the rotor currents equals the supply frequency, the starting current of the rotor is very large in magnitude and lags by a very large angle, resulting a poor starting torque per ampere. It is roughly 1.5 times the full-load torque, although the starting current is 5 to 7 times the full load current. Hence, such motors are not useful where the motor has to start against heavy loads. Therefore it becomes imperative that the best architecture and the corresponding dimensioning have to be determined in order to maximize the starting torque with respect to several constraints in applications requiring high starting torque such as in traction systems. The resulting mathematical optimization problem is usually difficult since the design variables contain continuous variables related to the real dimensioning parameters and combinatorial variables associated with architecture characteristics and discrete dimensioning parameters; and their relationship with motor specifications are in general nonlinear (Kentli 2009).
In recent decades, several classical techniques such as nonlinear programming, (Menzies et al 1975), Lagrangian relaxation method (Gyeorye Lee et al 2013), direct and indirect search methods (Bharadwaj et al 1978), Hooks and Jeeves method (Faiz et al 2001), Rosenbrock’s method (Bharadwaj et al 1979-a), Powell’s method (Ramarathnam et al 1973), finite element method (Parkin et al 1993) and sequential unconstrained minimization technique (Bharadwaj et al 1979-b) have been suggested for IM design problem. Many of these methods are most cumbersome and time consuming and pose difficulty in handling non-linear and discontinuous objectives and constraints. Besides a few of them requires derivatives and exhibits poor convergence properties due to approximations in derivative calculations; and may converge to local solution instead of global ones, when the initial guess is in the neighborhood of a local solution.
In recent years nature inspired metaheuristic optimization algorithms such as simulated annealing (Bhuvaneswari et al 2005:), genetic algorithm (GA) (Millie Pant et al 2008), evolutionary algorithm (Jan Pawel Wieczorek et al 1998), evolutionary strategy (Kim MK et al 1998), particle swarm optimization (PSO) (Sakthivel et al 2010-a) and bacterial foraging (Sakthivel et al 2010-b), differential evolution (Thanga Raj et al 2012) have been widely applied in solving the IM design problems with a view of overcoming the drawbacks of classical methods. These algorithms have yielded satisfactory results across a great variety of design optimization problems.
A new GA based design methodology for maximizing the starting torque of IMs with a view of effectively exploring the solution space and obtaining the global best solution has been suggested in this paper. The developed design methodology has been applied in designing two IMs and the performances have been studied. The paper is divided into six sections. Section 1 narrates the introduction, section 2 overviews GA, section 3 outlines the IM design problem and presents the proposed method (PM), section 4 discusses the results and section 5 concludes.
2. Genetic Algorithm
The GA is essentially a search process based on the mechanics of natural selection and natural genetics to obtain a global optimal solution of a combinatorial optimization problem. The power of this algorithm accrues from its ability to exploit historical information structures from the previous solution guesses in an attempt to enhance the performance of future solution structures (Goldberg 2000). The execution of GA involves initialization of population of chromosomes and generation of new chromosomes based on fitness values. The process of generation of new chromosomes and the selection of those with better fitness values are continued until the desired conditions are satisfied. The process can be terminated after a fixed number of generations or when any significant improvement in the solution ceases to occur.
2.1 Genetic Representation
1
x x2 x3
0 1 1 0 1 1 1 0 0 0 1 1 1 0 1
Fig. 1 Encoding scheme of a chromosome
The xi value of each sub-string of the chromosome is evaluated first by decoding its binary values into its decimal equivalent EDi and then the following expression is computed
i nbits
i i i
i ED
x x x
x
1 2
min max min
(1)
2.2 Fitness Function
The fitness function that represents the quality of the solution is defined by suitably augmenting the objective function and constraints. It gives a raw measure of the amount of fit of each chromosome in the problem space and contributes to the selection process. The fitness function is penalized, if there are constraint violations.
2.3 Genetic Operators
The operators reproduction, crossover and mutation coordinate together to explore and exploit various areas of the search space in order to locate the global optimum. Reproduction is simply an operation whereby an old chromosome is copied into a mating pool according to its fitness value. Crossover is the primary genetic operator, which promotes the exploration of new regions in the search space. It begins first by randomly selecting any two members previously placed in the mating pool during reproduction. A crossover point is then selected at random and information up to the crossover point of one parent is exchanged with the other member, thus creating two new members for the next generation. Mutation is an occasional random alternation of one or more bits of a chromosome and introduces beneficial materials, which help to diversify the population and consequently allows the GA to search in new regions of the search space.
2.4 Genetic Iteration
The process of generating a parent population through selection and reproduction from an initial population and then generating a child population through crossover and mutation from the parent population may be called as a genetic iteration. The genetic iterations may be continued by taking the child population obtained in the previous iteration as the initial population for the next iteration. The chromosome with maximum fitness is taken as the global solution of the given optimization problem on the completion of a specific number of genetic iterations.
3. Proposed Method
The proposed GA based solution method for ODIM involves formulation of the problem, representation of chromosomes comprising the chosen design variables and construction of a fitness function, FIT.
3.1 Problem Formulation
The ODIM problem involves large number of design variables. Many of these variables fortunately have a little influence either on the objective function or on the specified constraints. However, to ease the curse of high dimensionality, the following seven variables are identified as primary design variables.
T
x x x X
core the in density Flux
density current Rotor
density current Stator
gap air of Length
conductor Ampere
density flux gap air of value Average
pitch pole length to Core
] , , ,
[ 1 2 7 (2)
The ODIM problem is formulated by defining an objective function and a set of constraints as
Maximize SFL
I I T x h
r sc
st *
) (
2
(3)
.75 0 factor power
0.5 current load no unit per
70 rise perature stator tem
1.5 ratio torque load full to starting
05 . 0 load full at slip
2.0 h rotor teet of
density flux maximum
2 th stator tee of
density flux maximum
0 ) (x
g (4)
max min
i i
i x x
x i1,2,nd (5)
Where
ph
r I
I 0.85* (6)
Z V
Isc ph (7) 3.2 Representation of Design Variables
The chromosome of the design problem is represented to denote the chosen seven primary design variables, each tailored by 6 binary bits, in vector form.
x1, x2, , x7
Chromosome (8)
3.3 Fitness Function
The algorithm searches for optimal solution by maximizing a fitness function FIT, which is formulated from the objective function of Eq. (3) and the penalty terms representing the limit violation of the explicit constraints of Eq. (4). The FIT is written as
Maximize
i i x
g w
x h
FIT 2
) ( 1
)
( (9)
3.4 Solution Process
An initial population of chromosomes is obtained by generating random values within their respective limits through Eq. (5). The FIT is calculated by considering the decoded values of each chromosome in the population and the genetic operators are applied with a view of maximizing the FIT till the number of iterations reaches a specified maximum number of iterations. The pseudo code of the PM is as follows.
Read the IM Data
Choose the GA parameters.
Generate the initial population of chromosomes Set the iteration counter t0
while (termination requirements are not met) do for i1:PS
Obtain the primary design variables from i-th chromosome. Compute the remaining secondary variables of the design problem. Evaluate FITi using Eq. (9)
end-(i)
Apply GA operators of reproduction, crossover and mutation Rank the chromosomes and find the current best.
end-(while)
4. Numerical Results
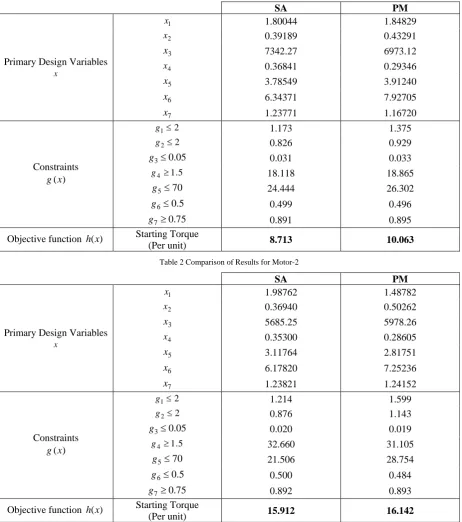
The proposed GA based method is used to obtain the optimal design of two IMs. The first machine under study is rated for 7.5 kW, 400 V, 4 pole, 50 Hz and the second one for 30 kW, 400 V, 6 pole, 50 Hz. The effectiveness of the PM is demonstrated through comparing the performances with that of the SA based design approach. In this regard, the same set of primary design variables, fitness function and design equations, involved in the PM, are used to develop the SA based design approach. The software packages are developed in Matlab platform and executed in a 2.67 GHz Intel core-i5 personal computer. There is no guarantee that different executions of the developed design programs converge to the same design due to the stochastic nature of the SA and GA, and hence the algorithms are run 20 times for each motor and the best ones are presented. The optimal design representing the values of the primary design variables and their performances are presented for both the motors in Table-1 and 2 respectively.
Table 1 Comparison of Results for Motor-1
SA PM
Primary Design Variables
x
1
x 1.80044 1.84829
2
x 0.39189 0.43291
3
x 7342.27 6973.12
4
x 0.36841 0.29346
5
x 3.78549 3.91240
6
x 6.34371 7.92705
7
x 1.23771 1.16720
Constraints ) (x g
2
1
g 1.173 1.375
2
2
g 0.826 0.929
05 . 0
3
g 0.031 0.033
5 . 1
4
g 18.118 18.865
70
5
g 24.444 26.302
5 . 0
6
g 0.499 0.496
75 . 0
7
g 0.891 0.895
Objective function h(x) Starting Torque
(Per unit) 8.713 10.063
Table 2 Comparison of Results for Motor-2
SA PM
Primary Design Variables
x
1
x 1.98762 1.48782
2
x 0.36940 0.50262
3
x 5685.25 5978.26
4
x 0.35300 0.28605
5
x 3.11764 2.81751
6
x 6.17820 7.25236
7
x 1.23821 1.24152
Constraints ) (x g
2
1
g 1.214 1.599
2
2
g 0.876 1.143
05 . 0
3
g 0.020 0.019
5 . 1
4
g 32.660 31.105
70
5
g 21.506 28.754
5 . 0
6
g 0.500 0.484
75 . 0
7
g 0.892 0.893
Objective function h(x) Starting Torque
It is seen from these tables that the PM offers a starting torque of 10.063 and 16.142 per units, which are higher than that of SA based approach, for motor-1 and -2 respectively. These tables also include the values of the constraints of Eq. (4) along with their limits. It can also be observed from these tables that both the methods bring the constraints such as maximum flux density, slip at full load, starting to full load torque ratio, etc., of Eq. (4) to lie within the respective limit, as the constraints are added as penalty terms in the fitness function of Eq. (11).
4. Conclusion
Indeed the GA is a powerful population based method for solving complex optimization problems. A new methodology involving GA for solving ODIM problem has been developed and applied on two IM design problems. It determines the optimal values for primary design variables. The ability of the PM to produce the global best design parameters that maximizes the starting torque of the motor has been projected. It has been chartered that the new approach fosters the continued use of GA and will go a long way in serving as a useful tool in design problems.
Acknowledgments
The authors gratefully acknowledge the authorities of Annamalai University for the facilities offered to carry out this work.
References
[1] Bell J and McMullen P. (2004). Ant colony optimisation techniques for the vehicle routing problem. Adv Eng Inform 2004;18:41–8. [2] Bharadwaj. D.G., Venkatesan.K and Saxena.R.B. (1978). Computer aided design of polyphase cage induction motors, Proc. Int. Conf.
On Electrical Machines, Brussels, Belgium, 1(SP2/1): 1-10
[3] Bharadwaj. D.G., Venkatesan.K and Saxena.R.B. (1979-a). Induction motor design optimization using constrained Rosenbrock method (Hill Algorithm), Comput. Elec. Engg. 6(1): 41-46.
[4] Bharadwaj. D.G, Venkatesan.K.and Saxena.R.B. (1979-b). Nonlinear programming approach for optimum cost induction motors--SUMT algorithm, Comput. and Elect. Engg., 6(3): 199-204.
[5] Bhuvaneswari.R and Subramanian.S. (2005). Optimization of three phase induction motor design using simulated annealing algorithm, Electric Power Components and Systems, 33: 947-956.
[6] Dorigo. M, Maniezzo.V and Colorni. A. (1996). Ant system: optimisation by a colony of cooperating agents, IEEE Trans. On Systems, Man and Cybernetics, Part B, 26(1): 29-41.
[7] Dorigo and M, Gambardella LM. (1997-a). Ant colonies for the traveling saleman problem. Biosystems, 43:73–81.
[8] Dorigo and M, Gambardella LM.(1997-b). Ant colony system: a cooperative learning approach to the travelling salesman problem. IEEE Trans Evolut Comput., 1(1):53–66.
[9] (13/2:22/2:7/5) Faiz. J and Sharifian. M.B.B. (2001). Optimal design of three phase induction motors and their comparison with a typical industrial motor, Comp. and Elect. Eng. 27: 133-144.
[10] Gambardella LM, Taillard E and Dorigo M. (1999). Ant colonies for the quadratic assignment problem. J Oper Res Soc, 50:167–76. [11] Goldberg.D.E. (2000). Genetic algorithms in search, optimisation & machine learning, Pearson Education, Asia.
[12] Gyeorye Lee, Seungjae Min, and Jung-Pyo Hong. (2013). Optimal shape design of rotor slot in squirrel-cage induction motor considering torque characteristics, IEEE Transactions on Magnetics, 49(5): 2197-2200.
[13] Jan Pawel Wieczorek, Ozdemir Gol and Zbigniew Michalewiez. (1998). An evolutionary algorithm for the optimal design of induction motors, IEEE Trans. Magnetic, 34(6): 3882-3887.
[14] Kim MK, Lee CG, Jung HK. (1998). Multiobjective optimal design of three-phase induction motor using improved evolution strategy, IEEE Trans. on Magnetics, 34(5): 2980-2983.
[15] Kentli. K. (2009). A survey on design optimization studies of induction motors during the last decade, Journal of Electrical and Electronics Engineering, 9(2): 969-975.
[16] Menzies. R.W and Neal. G.W. (1975). Optimization program for large induction motor design, Proc.I.E.E., 11(6), 643-646.
[17] Millie Pant and Radha Thangaraj. (2008). Efficiency optimization of electric motors: a comparative study of stochastic algorithms, UK World Journal of Modelling and Simulation, 4(2): 140-148.
[18] Parkin T. S and Preston T.W, (1993). Induction Motor Analysis Using Finite Element", Proc.IEE, The Eighth International Conference on Electrical Machines and Drives, 20-24.
[19] Ramarathnam, R., Desai.B.G., and Subba Rao. V. (1973). A comparative study of minimization techniques for optimization of induction motor design. IEEE Transactions on Power Apparatus and Systems PAS-92 (5): 1448–1454.
[20] Sakthivel. V.P, Bhuvaneswari. R and Subramanian. S. (2010-a). Economic design of three-phase induction motor by particle swarm optimization, J. Electromagnetic Analysis and Applications, 2: 301-310.
[21] Sakthivel. V.P, Bhuvaneswari. R and Subramanian. S. (2010-b). Design optimization of three-phase energy efficient induction motor using adaptive bacterial foraging algorithm, The International Journal for Computation and Mathematics in Electrical and Electronic Engineering, 29 (3): 699-726