International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 11, November 2012)206
Population based meta-heuristic techniques for solving
optimization problems: A selective survey
Kalyani Manda
1, Suresh Chandra Satapathy
2, B. Poornasatyanarayana
31
PG Scholar, 3Professor, Chaitanya Engineering College
2Professor, Anil Neerukonda Institute of Technology and Science
Abstract — Optimization is necessary for finding appropriate solutions to a range of real life problems. Some meta-heuristic techniques, especially population-based techniques have become popular and are widely used. This paper presents a survey on a select few including genetic algorithms, ant colony optimization, particle swarm optimization and artificial bee algorithm. Additionally, the survey is extended to present differential evolution and teaching-learning based optimization. Applications of the mentioned algorithms are also presented. This review intends to serve as a reference for further work in this domain.
Keywords — Optimization, Meta-heuristic techniques, Survey, Applications.
I. INTRODUCTION
Objectives of optimization implicitly include reducing computational time and complexity. For this very reason, competing methods of optimization have grown over the years. But, over time, each method—traditional or modern—has found specific applications. For example, traditional methods such as gradient based algorithms still find relevance with smooth unimodal problems. Modern methods such as Ant Colony Optimization (ACO) have found significant applications in solving problems such as travelling salesman problem [1]. The word method, here, should be understood as an algorithm that underlines the computational procedure to find an optimal solution to any given problem.
All optimization algorithms so far developed can be
classified into either deterministic or stochastic.
Deterministic algorithms tend to use gradient technique and find greater use in solving unimodal problems; whereas stochastic algorithms find applications in solving more complex multimodal problems. Within stochastic models, there are heuristic and meta-heuristic models. While heuristic models resemble trial and error mechanisms, and depend on computational capacity; meta-heuristic models tend to learn as they run, and tend to be more intelligent and adaptive. No wonder! Meta-heuristic methods are more sought—as they work better with global optimization problems. Meta-heuristic algorithms are further divided into population-based and trajectory-based algorithms.
Trajectory-based algorithms rely on single-agent to search through solution space; and population-based algorithms use multiple agents and hence tend to perform better.
A futile effort that this paper will not pursue is to overstate the capabilities of the optimization methods discussed herein. Rather, the objective is to present how population based meta-heuristic techniques work, and indicate their applications.
This paper goes on to present, in the following sections, genetic algorithms, ant colony optimization, particle swarm optimization, differential evolution, artificial bee colony algorithm, and teaching-learning based optimization, and the conclusion.
II. GENETIC ALGORITHMS
Genetic Algorithm is an evolutionary based technique introduced by David Goldberg. The working principle of genetic algorithm is based on Darwinian principle of reproduction and survival of the fittest; and uses genetic operators such as crossover and mutation. Like other evolutionary based techniques, GA is also an iterative procedure which maintains a constant population size. GA works as follows:
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 11, November 2012)207
The primary parameters for controlling the genetic algorithm are the population size, indicated by S, and the maximum number of generations to be run, indicated by G. Each generation requires termination criteria, and at the end of each generation, the best individual is often designated.
The three steps in executing the genetic algorithm are as follows:
Initially create a random population of individual fixed-length character strings.
Repeat the following sub-steps until the termination condition is satisfied.
Calculate the fitness of each individual using fitness measure
Create a new population by applying the three genetic operations.
Reproduce an existing individual by copying it into new population
Create two new individuals from the existing individuals by genetically recombining the individuals using crossover operation
Create a new individual from an existing individual by random mutation
The individual identified through result may represent a solution to the problem.
GA could be effective in complex, highly non-linear, and multidimensional search spaces.
III. ANT COLONY OPTIMIZATION
Ant colony optimization [3,4,5] is a meta-heuristic
technique introduced for solving combinatorial
optimization problems. Inspiration for ACO is the foraging behaviour of real ants. When searching for food, ants initially explore the area surrounding their nest in a random manner. As soon as an ant finds a food source, it evaluates the quantity and the quality of the food and carries some of it back to the nest. During the return trip, the ant deposits a chemical pheromone trail on the ground. The quantity of pheromone deposited, which depends on the quantity and quality of the food, will guide other ants to the food source. It is important to note that, when an obstacle occurs, half of the ants try to get around it on the right and half on the left. By founding the shortest path around the obstacle, ants increase the pheromone concentration; and finally all ants will choose that shortest path. Indirect communication between the ants via pheromone trails enables them to find shortest paths between their nest and food sources. This characteristic of real ant colonies is exploited in artificial ant colonies in order to solve optimization problems.
To apply ACO, the optimization problem is transformed to a problem of finding the best path on a weighted graph. The artificial ants build solutions incrementally by moving on the graph. ACO uses parametric probabilistic model
called Pheromone model which acts as the central
component. It consists of set of parameters associated with the graph components (either edges or nodes) called pheromone trail parameters; whose values are called pheromone values. At run time, ACO updates pheromone values depending on the previously generated solutions [6,7,8,].
The ACO meta-heuristic algorithm consists of the following steps:
Initialize pheromone trail parameters
Repeat until termination criteria is met
Construct Ant Solutions
Choose a start city at which the ant is positioned
Probabilistically construct a tour by using pheromone and heuristic values; by iteratively adding the ants‘ unvisited cities, until all cities have been visited
Go back to the initial city
Update Pheromones
Pheromone updation aims at increasing the
pheromone values associated with good
solutions and decrease the same associated with bad ones. Decreasing of pheromone values is
achieved usually through pheromone
evaporation; and increasing is achieved by increasing the pheromone levels of good solution set.
Daemon Actions {Optional}
These are problem specific actions. The most used Daemon action consists in the application of local search to the constructed solutions. The locally optimized solutions will then decide which pheromone values to update.
Different ACO Algorithms use different ways of pheromone updation.
IV. PARTICLE SWARM OPTIMIZATION
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 11, November 2012)208
In PSO, a swarm refers to a number of potential solutions to the optimization problem. Each single solution is a "bird" in the search space. We call it "particle". All particles have fitness values which are evaluated by the fitness function to be optimized, and have velocities which direct the flying of the particles. The particles fly through the problem space by following the current optimum particles. Initially it had two cognitive aspects: individual learning, and learning from the social group; where an individual uses both to move towards the solution [9,10]:
pi xi
pg xi
iv t
v 1 11 22 (1)
1 1
xt vt
t
x (2)
where constants 1 and 2determine the balance between the influence of the individual‘s knowledge (1) and that of the group (2) (both set initially to 2),
1
and2are uniformly distributed random numbers
defined by some upper limit, max, that is a parameter
of the algorithm,pi and pgare the individual‘s previous
best position and the group‘s previous best position, and xi is the current position in the dimension considered. This was found to suffer from instability caused by particles accelerating out of the solution space. Eberhart therefore proposed clamping the velocity to a proportion of the maximum particle movement.
The most problematic characteristic of PSO is it converges prematurely, on early best solutions. The most popular technique to overcome this is inertia and constriction. The inertia term,
, was introduced by Shi and Eberhart [11] thus
i i
g i
i
t v p x p x
v1 11 22 (3)
Later Eberhart and Shi [12] proposed to initially set
to 0.9 and linearly reduce it to 0.4, allowing initial exploration followed by acceleration towards an improved global optimumPSO algorithm consists of just three steps, which are repeated until some stopping condition is met:
1.Evaluate the fitness of each particle
2.Update individual fitness, global best fitness, and positions
3.Update velocity and position of each particle
The velocity and position update step is responsible for the optimization ability of the PSO algorithm.
Procedure of PSO:
Initialize particles randomly
Repeat until termination criteria is met
For each particle, calculate the fitness value. If the fitness value is better than the best fitness value in history, set the current value as the new Particlesbest
Choose the particle with the best fitness value of all the particles as the Gbest
For each particle, calculate particles velocity according to equation 1, and update particles position according to equation 2
V. DIFFERENTIAL EVOLUTION
Differential Evolution (DE) is a parallel direct search method developed by Storn and Price in 1997. It uses a real-coded representation. This approach for numerical optimization is simple to implement and requires little or no parameter tuning, but gives a remarkable performance. Like all other evolutionary algorithms, the initial population is chosen randomly.
A. Classical DE
Like other evolutionary algorithms, DE also consists of three basic steps [13]:
1. Generation of population with N individuals in the d-dimensional space, randomly distributed over the entire search domain
a.Xi
t
xi,1
t,xi,2
t,xi,3
t....xiD
t
, where t=0,1,2,….t,t+12. Replacement of this current population by a better fit new population, and
3. Repetition of this replacement until satisfactory results are obtained or certain criteria of termination is met.
The basic scheme of DE is given below:
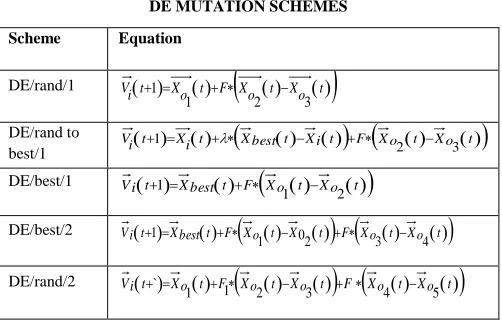
In DE mutation can be done in different ways. Table 1 indicates different mutation schemes of DE. In this table
t i
X0 is the vector chosen randomly.
t best
X is the best vector of the current generation.
t i
V is the donor vector
F, F1 and F2 are the weighing factors selected in the
range from 0 to 1.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 11, November 2012)209
Procedure for DE
1.Randomly initialize the position of the particles 2.Evaluate the fitness for each particle
3.For each particle, create Difference-Offspring 4.Evaluate the fitness of the Difference-Offspring 5.If an offspring is better than its parent then replace the
parent by offspring in the next generation;
[image:4.612.44.295.264.430.2]6.Loop to step 2 until the criterion is met, usually a sufficiently good fitness or a maximum number of iterations.
TABLE I
DE MUTATION SCHEMES Scheme Equation
DE/rand/1 Vi t Xo t F
Xo t Xo t
3 2 11
DE/rand to
best/1
t o X t o X F t i X t best X t i X t i V
3 2 1
DE/best/1 Vi t Xbest t F
Xo t Xo t
2 1 1
DE/best/2 Vi t Xbest t F
Xo t X t
F
Xo t Xo t
4 3 2
0 1
1
DE/rand/2 Vi t Xo t F
Xo t Xo t
F
Xo t Xo t
5 4 32 1 1
`
VI. ARTIFICIAL BEE COLONY OPTIMIZATION
The Artificial Bee Colony (ABC) algorithm was introduced by Karaboga in 2005. It was inspired by the intelligent foraging behavior of honey bees. The model consists of three essential components: employed and unemployed foraging bees, and food sources. The first two components, employed and unemployed foraging bees, search for rich food sources, which is the third component close to their hive. The employed bees are associated with specific food sources; onlooker bees watch the dance of employed bees within the hive to choose a food source; and scout bees search for food sources randomly. Both onlookers and scouts are also called unemployed bees. Initially all food source positions are discovered by scout bees. Thereafter the nectar of food sources are exploited by employed bees and onlooker bees, and this continuous exploitation will ultimately cause them to become exhausted. Then the employed bee which was exploiting the exhausted food source becomes a scout bee in search of further food sources once again. That means the employed bee whose food source has been exhausted becomes a scout bee [14].
In ABC, the position of the food source represents a possible solution to the problem and the nectar amount of a food source corresponds to the quality (fitness) of the associated solution. The number of employed bees is equal to the number of food sources (solutions) since each employed bee is associated with only one food source.
The algorithm for ABC is as follows: Initialization phase
Repeat
Employed Bees Phase
Onlooker Bees Phase
Scout Bees Phase
Memorize the best solution achieved so far
Until (cycle=Maximum cycle number or Maximum
CPU time)
VII. TEACHING LEARNING BASED OPTIMIZATION
This algorithm is inspired by teaching and learning process; and hence the name. TLBO method is based on the influence of a teacher on the output of learners in a class. In this setting, the output is considered in terms of results or grades. And according to pedagogical techniques, teacher is generally considered as a highly learned person who shares his/her knowledge with the learners. Quality of the teacher then affects the outcome of the learners, i.e. the better the training of the teacher, the better is the learning [15]
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 11, November 2012)210
Algorithm for the implementation of TLBO for optimization is given below:
Step 1: Define the optimization problem and initialize the optimization parameters.
Step 2: Initialize the population. Step 3: Teacher phase.
Step 4: Learner phase. Step 5: Termination criterion.
Stop if the maximum generation number is achieved; otherwise repeat from Step 3.
VIII. APPLICATION AREAS
Algorithm Application
Genetic Algorithms Portfolio selection in financial management [16] Robotics [17]
Neural networks [18] Semantic nets [19]
Ant Colony Optimization
Quadratic assignment [20] Graph colouring [21] Bayesian networks [22]
Packet switched network routing[23]
Particle Swarm Optimization
Artificial neural networks [24] Neural fuzzy networks [25] Colour image quantization [26] Protein motif discovery [27]
Differential Evolution
Optimal Power flow [28] Electromagnetic Imaging [29] Automatic Clustering [30]
Dynamic Optimization Problems [31]
Artificial Bee Colony
Numerical Problems [32]
Network reconfiguration problem [33] Training Neural Networks [34] Constrained Optimization problems [35]
Teaching and Learning Based Optimization
Location of automatic voltage regulators in distributed systems[36]
Integer Programming for generation maintenance scheduling in power systems[37]
Data Clustering[38]
Economic Load Dispatch problem with incommensurable objectives[39]
IX. CONCLUSION
Six population-based meta-heuristic algorithms have been reviewed; their working procedure briefed, and the range of applications indicated. This paper has hence served its objective. This paper may not add to the existing body of literature, but reorganizes it; and, it also serves the effort of scoping further research in this direction.
REFERENCES
[1] Marco Dorigo, Christian Blum, Ant colony optimization theory: A survey, Theoretical Computer Science , 344 (2005) 243 – 278 [2] M.Tomassini, A survey of genetic algorithms, Annual reviews of
Computational Physics, World Scientific, Volume 3.1995.
[3] M. Dorigo, Optimization, learning and natural algorithms (in Italian), Ph.D. Thesis, Dipartimento diElettronica, Politecnico di Milano, Italy, 1992
[4] M. Dorigo, V. Maniezzo, A. Colorni, Positive feedback as a search strategy, Tech. Report 91-016, Dipartimento di Elettronica, Politecnico di Milano, Italy, 1991.
[5] M. Dorigo, V. Maniezzo, A. Colorni, Ant system: optimization by a colony of cooperating agents, IEEE Trans. Systems, Man, Cybernet.-Part B 26 (1) (1996) 29–41
[6] Oscar Cordon, Francisco Herrera, Thomas Stutzle, A Review on the Ant Colony Optimization Metaheuristic: Basis, Models and New Trends, Mathware and Softcomputing 9,2002.
[7] M. Dorigo, C.Blum, Ant Colony Optimization Theory: A Survey, Theoretical Computer Science 344 (2005) 243 – 278.
[8] Mr.Avdhesh Mann, Dr.Rajneesh Talwar, Dr.Bharat Bhushan
,Mr.Rakesh Gupta, A REVIEW OF ANT COLONY
OPTIMIZATION, IJESS Volume2,Issue7 (July-2012)
[9] Alec Banks, Jonathan Vincent, Chukwudi Anyakoha, A review of particle swarm optimization. Part I: background and development, Nat Comput (2007) 6:467–484
[10]Alec Banks, Jonathan Vincent, Chukwudi Anyakoha, A review of particle swarm optimization. Part II: hybridisation, combinatorial, multicriteria and constrained optimization, and indicative applications, Nat Comput (2008) 7:109–124
[11]Shi, Y. and Eberhart, R. C. A modified particle swarm optimizer. Proceedings of the IEEE International Conference on Evolutionary Computation. Piscataway, NJ: IEEE Press, pp. 69-73, 1998. [12]Eberhart, R. C. and Shi, Y. Comparing inertia weights and
constriction factors in particle swarm optimization. Proc. Of Conference on Evolutionary Computation 2000,Piscataway, NJ: IEEE Press, pp. 84-88, 2000.
[13]Rainer Storn, Differential Evolution - A simple and efficient adaptive scheme for global optimization over continuous spaces. [14]Dervis karaboga, Bakhriye Akay. A Survey: algorithms simulating
bee swarm intelligence. Artif Intell Rev (2009) 31:61–85.
[15]R.V. Rao,V.J.Savsani, D.P.Vakaria. Teaching-learning-based optimization: A novel method forconstrained mechanicaldesign optimization problems. Computer-Aided Design 43 (2011) 303–315. [16]O.Pictet,M.Dacorogna,B.Chopard,M.Oussaidene,R.Schirruand,M.To massini,UsingGeneticAlgorithms for Robust Optimization in FinancialApplications, toappear,NeuralnetworkWorld,1995. [17]Davidor, Yuval.Genetic Algorithms and Robotics. Singapore: World
Scientific. 1991
[18]Schaffer, J. D. and D. Whitley (editors). 1992. Proceedings of the Workshop on Combinations of Genetic Algorithms and Neural Networks. Los Alamitos, CA: The IEEE Computer Society Press. 1992.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 11, November 2012)211
[20]V. Maniezzo and A. Colorni. The Ant System applied to the quadratic assignment problem. IEEE Transactions on Data and Knowledge Engineering, 11(5): 769-7778,1999
[21]D. Costa and A. Hertz. Ants can colour graphs. Journal of the operational Research Society, 48:295-305, 1997.
[22]M.I. Jordan (Ed.), Learning in Graphical Models, MIT Press, Cambridge, MA, 1998
[23]G. Di Caro, M. Dorigo, AntNet: distributed stigmergetic control for communications networks, J. Artif. Intel.Res. 9 (1998) 317–365 [24]Sugisaka M, Fan X (2005) An effective search method for neural
network based face detection using particle swarm optimization. IEICE Trans Inf Syst E88-D(2):214
[25]Lin C-J, Hong S-J, Lee C-Y (2006) The design of neuro-fuzzy networks using particle swarm optimization and recursive singular value decomposition. In: 2006 International joint conference on neural net-works, Sheraton Vancouver Wall Centre Hotel, Vancouver, BC, Canada, 16–21 July 2006
[26]Omran MG, Engelbrecht AP, Salman A (2005) A color image quantization algorithm based on particle swarm optimization. Informatica 29:261–269
[27]Chang BCH, Ratnaweera A, Halgamuge SK, Watson HC (2004) Particle swarm optimization for protein motif discovery. Genet Program Evolvable Mach 5:203–214
[28]R. Storn, ―Differential evolution design of an IIR-filter with require-ments for magnitude and group delay,‖ inProc. IEEE Int. Conf. Evol.Comput., 1996, pp. 268–273
[29]R. Storn, ―System design by constraint adaptation and differential evolution,‖IEEE Trans. Evol. Comput., vol. 3, no. 1, pp. 22–34, Apr.1999
[30]S. Das, A. Abraham, and A. Konar, ―Automatic clustering using an improved differential evolution algorithm,‖ IEEE Trans. Syst. ManCybern. Part A, vol. 38, no. 1, pp. 218–236, Jan. 2008. [31]R. Mendes and A. S. Mohais, ―DynDE: A differential evolution for
dynamic optimization problems,‖ inProc. IEEE Congr. Evol. Comput.,vol. 2. 2005, pp. 2808–2815.
[32]B. Basturk, and D. Karaboga, ―An Artificial Bee Colony (ABC) Algorithm for Numeric Function Optimization,‖ IEEE Swarm Intelligence Symposium 2006, Indianapolis, Indiana, USA, 2006 [33]Rao RS, NarasimhamS, RamalingarajuM (2008) Optimization of
distribution network configuration for loss reduction using artificial bee colony algorithm. Int J Electr Power Energy Syst Eng 1(2):116– 122
[34]Karaboga D, Akay B (2007) An artificial bee colony (abc) algorithm on training artificial neural networks. In:15th IEEE signal processing and communications applications, SIU 2007, Eskisehir, Turkiye, pp 1–4.
[35]Karaboga D, Basturk B (2007a) Artificial bee colony (ABC) optimization algorithm for solving constrained optimization problems. In: Advances in soft computing: foundations of fuzzy logic and soft computing,LNCS, vol 4529/2007. Springer-Verlag, pp 789–798.
[36]Taher niknam,rasoul azizipanah-Abarghooee, Mohammad rasoul narimani, A new multi objective optimization approach based on TLBO for Location of automatic voltage regulators in distributed systems Engineering applications of artificial intelligence,2012 [37]suresh Chandra satapathy, Anima Naik and k. Parvathi, Integer
Programming for generation maintenance scheduling in power
systems based on Teaching and Learning Based
Optimization(TLBO), Communications in computer and information science, 2012
[38]Suresh Chandra Satapathy and Anima Naik, Data Clustering based on Teaching-Learning based optimization, Swarm, Evolutionary and Memetic computing, Lecture Notes in Computer Science, 2011, volume 7077/2011, 148-156.