SCALE 12S -14P OUTER ROTOR HEFSM
GADAFI BIN M.ROMALAN
DESIGN AND DEVELOPMENT OF A SMALL-SCALE 12S-14P OUTER ROTOR HEFSM
GADAFI BIN M.ROMALAN
A thesis submitted in
fulfilment of the requirement for the award of the Degree of Master of Electrical Engineering
Faculty of Electrical & Electronic Engineering Universiti Tun Hussein Onn Malaysia
To my beloved family.
Thank you for your prayer and support. I love you all.
ACKNOWLEDGEMENT
In the name of ALLAH, the most Gracious and the Most Merciful. Alhamdulillah, all praises to Allah Almighty for His grace and His blessings given to me for the successful completion of my master’s studies.
I also wish to express my gratitude to my supervisor, Dr. Erwan Sulaiman for his guidance, invaluable help, advice, and patience on my project research. Without his constructive and critical comments, continuous encouragement, and good humour while facing difficulties, I could not have completed this research. I am also very grateful to him for guiding me to think critically and independently.
I acknowledge, with many thanks, UTHM and KPM MyBrain15 for awarding me a scholarship for my master’s programme. I am much honoured to be the recipient
for this award. Receiving this scholarship has given me motivation, confidence, and willingness to achieve my goals.
Without support from technical staff and my lab fellows of FSM research group, this research would not have been undertaken. My sincere thanks to all my FSM group friends, especially Mr. Md Zarafi Ahmad, Mr. Faisal Khan, and Mr. Fairoz Omar. They helped me many times with their technical knowledge.
It has been a very pleasant and enjoyable experience to work in UTHM with a group of highly dedicated people, who have always been willing to provide help, support, and encourage me whenever needed. I would like to thank all my friends during my stay in UTHM. Life would never have been so joyful without you.
ABSTRACT
ABSTRAK
CONTENTS
ACKNOWLEDGEMENT iv
ABSTRACT v
ABSTRAK vi
CONTENTS vii
LIST OF TABLES x
LIST OF FIGURES xii
LIST OF SYMBOLS AND ABBREVATIONS xv
LIST OF PUBLICATIONS xvii
LIST OF AWARDS xviii
CHAPTER 1 INTRODUCTION 1
1.1 Background Introduction 1
1.2 Problem Statement 2
1.3 Objectives 3
1.4 Scopes 3
1.5 Research Contribution 4
1.6 Thesis Outline 5
CHAPTER 2 LITERATURE REVIEW 7
2.1 Flux Switching Motor 7
2.1.1 Fundamental of Outer-Rotor HEFSM 8 2.1.2 Outer-Rotor HEFSM Design 9 2.2 Fabrication of Motor Design 12
2.3 Prototype Experimental 19
2.3.1 Measurement System 19
2.3.2 Weightage in Fabrication 21
2.4 Summary 22
CHAPTER 3 DESIGN AND ANALYSIS OF SMALL SCALE 12S-14P OR-HEFSM USING JMAG DESIGNER 23
3.1 Design of Small-Scale 12S-14P OR-HEFSM 23
3.1.1 Part 1: Main Component of Rotor and
Stator Design 24
3.1.2 Part 2: Excitation Element of PM, FEC
and armature coil 35
3.1.3 Part 3: Finite Element Analysis (FEA)
and Material Setup 37
3.1.4 Part 4: Circuit Setup 37
3.1.5 Part 5: Simulation 38
3.2 Simulation Using JMAG Designer Solver 40
3.2.1 No-Load Analysis of 12S-14P
OR-HEFSM 40
3.2.2 Load Analysis of 12S-14P OR-HEFSM 43
3.2 Summary 44
CHAPTER 4 PROTOTYPE DEVELOPMENT OF THE DESIGNED 12S-14P OR-HEFSM USING APA 45
4.1 Actual Prototype Analysis (APA) 45
4.1.1 Gathering and Stacking Approach 45 4.2 Development of Small Scale 12S-14P
OR-HEFSM Using APA 48
4.3 Development of Direct Drive Prototype 68
4.4 Summary 70
CHAPTER 5 EXPERIMENTAL ANALYSIS OF A SMALL
SCALE PROTOTYPE 71
5.1 Experimental analysis 71
5.2 Prediction of Motor Performances by
Analytical Sizing Equations 77
5.3 APA Weightage (W factor) 82
5.4 Summary 87
CHAPTER 6 CONCLUSION AND FUTURE WORK 88
6.1 Conclusion 88
6.2 Future Work 89
REFERENCES 90
APPENDIX A: Technical Drawing 99 APPENDIX B: Details of Silicon Steel 35H210
and 35A250 103
APPENDIX C: Details of Cooper Coil 105 APPENDIX C: Details of Permanent Magnet
Neodymium 35AH 106
LIST OF TABLES
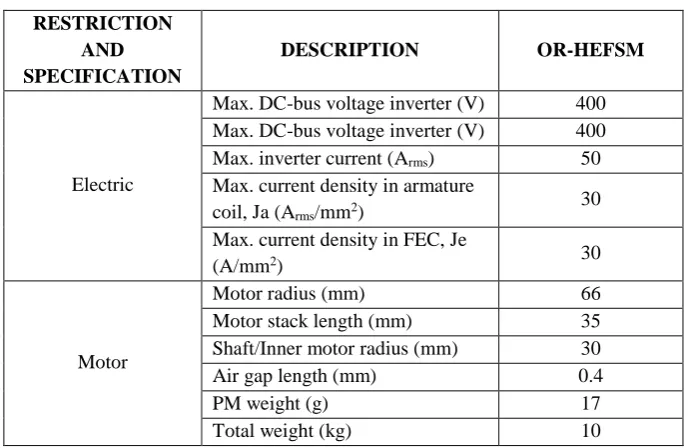
1.1 Restriction and specification 4
3.1 Rotor design analysis 26
3.2 Analysis of rotor design D with different number
of rotor holders 28
3.3 Analysis of rotor holders width 32
3.4 Analysis of rotor holders height 32
3.5 Analysis of chamfer and fillet on 4 rotor holders design 33 3.6 Parameter specifications P1 to P19 35 3.7 Materials for the design of 12S-14P OR-HEFSM 37 3.8 Ia and Ie (Ampere) based on various current density 38
3.9 Condition for simulation decision 39 4.1 Example of gathering terms regarding fabrication process 46 4.2 Example of stacking process based on task 46
4.3 Legend stacking of task for APA 46
4.4 Example of material decision table for stator and rotor 55 4.5 Material list for prototype 12S-14P OR-HEFSM 56 4.6 Example of machine decision table 57 4.7 Number of turn and filling factor of armature
coil and FEC 63
5.1 Differences in percentage of experimental to simulation
back EMF 77
5. 2 Calculated magnetic flux density at various Ja
with constant PM and Je 81
5.3 Division Weightage (DW) for APA 83
5.4 Division Evaluate Mark (DEM) analysis 83
5.5 Weightage stage 1 APA 85
5.7 Weightage stage 3 APA 86
5.8 Weightage stage 4 APA 86
5.9 Weightage stage 5 APA 86
LIST OF FIGURES
2.2 Fundamental electromagnetic concept 8
2.3 Principle operation of OR-HEFSM 9
2.4 Design of 8S-4P OR-HEFSM 10
2.5 Performance of 8S-4P OR-HEFSM 10
2.6 Initial design of three-phase 12S-14P OR-HEFSM 11 2.7 Torque versus Jeof initial design 12S-14P OR-HEFSM 11
2.8 Comparison of 12S-14P OR-HEFSM 11
2.9 Torque versus Je of the improved design 12S-14P
OR-HEFSM 12
2.10 PM brushless prototype design using SMC 13 2.11 PM mini motor using low cost fabrication technic 14
2.12 PMSM design 14
2.13 PM design axial-flux direct drive for scooter 15
2.14 18S-12P SRM design for EV 15
2.15 FSM design based on TSFE 16
2.16 Electromagnetic wave of FSM design based on TSFE 16 2.17 Complete fabrication of 12S-10P WFFSM 17 2.18 Complete fabrication of outer-rotor PMSM 18 2.19 Complete 3-D design of outer-rotor PMFSM 18 2.20 Complete design of outer-rotor PMSM for wind turbine 19 2.21 No-load property measurement system 20 2.22 Load property measurement system 20 2.23 Experiment set up for motor measurement system [43] 21 2.24 Equivalent block diagram motor of measurement
system in Figure 2.23 21
3.1 Flowchart of JMAG geometry editor and design 24 3.2 Design A with initial small scale design 25 3.3 Design B with rectangular shape rotor 25
3.6 Design D with three holders 29
3.8 Design D with six holders 30
3.9 Design D with seven holders 30
3.10 Design D with eight holders 31
3.12 Chamfer on four rotor holders design 33 3.14 Small-scale design of 12S-14P OR-HEFSM 34
3.15 Parameter P1 to P19 35
3.16 Excitation element 36
3.17 Flowchart of simulation analysis 39 3.19 Comparison of magnetic flux distribution at
high current 41
3.20 Flux cancelation and losses in small scale design
of 12S-14P OR-HEFSM 41
3.21 Fundamental and harmonic Back EMF of 12S-14P
OR-HEFSM 42
3.22 Cogging torque of small scale design of 12S-14P
OR-HEFSM 42
3.23 Torque versus FEC current density at various
armatures current densities 43
3.24 Power and Torque versus speed characteristic 44 4.1 Actual Prototype Analysis (APA) flowchart 47
4.2 Complete 3-D design flowchart 49
4.3 Rotor design 50
4.4 Stator design 51
4.5 Permanent magnet design 51
4.6 3-D design armature coil and FEC 52
4.7 Winding coil case 53
4.8 Shaft and retaining clip 53
4.9 Motor housing 54
4.10 Holder rotor to shaft 54
4.11 Silicon electric steel 35A250 57
4.12 Wire cutting machine 58
4.13 Wire cutting fabrication (a) Stator, (b) Rotor 59
4.15 Milling machine fabrication 60
4.16 3-D printer 60
4.17 Separator coil case 60
4.18 Permanent magnet NICUNI grade 35 61 4.19 Assembling process for prototype 62 4.20 Assembly flow of prototype 12S-14P OR-HEFSM 64 4.21 Full stack prototype 65 4.22 Coil case assembly 65 4.23 Finishing windings 66 4.25 Prototype assembly through step 1 to 6 for internal assembly 66 4.26 Finishing step 7 and 8 for external assembly generated by SolidWorks 67 4.27 Finishing prototype 67 4.28 Assembly flow for direct drive prototype 12S-14P OR-HEFSM 68 4.29 Direct drive prototype 12S-14P OR-HEFSM 69 4.30 Rim to direct drive prototype application of 12S-14P OR-HEFSM 69 4.31 Finishing direct drive prototype 70 5.1 General experimental flowchart of stage 5 of APA 72 5.2 Block diagram motor measurement system 73 5.3 Motor measurement system 74 5.4 Experimental coil test analysis 74 5.5 Back EMF at 600 r/min 75
5.6 Back EMF at 1,200 r/min 75
5.7 Back EMF at 1,800 r/min 75
5.8 Back EMF at 2,400 r/min 75
5.9 Back EMF at 3000 r/min 76
5.11 Calculated back EMF based on Equation 5.4 78 5.12 Effective area for small scale 12S-14P OR-HEFSM 79 5.13 Calculated and simulation torque versus various
LIST OF SYMBOLS AND ABBREVATIONS
A Ampere
AC Alternating Current
B Flux Density [T]
f Frequency [Hz], [rad/s]
I Current [A]
J Current Density [A/m2]
L Length [m]
N Number of turns
P Number of Poles
S Slot area [mm2]
r Radius [m]
r/min Revolution Per Minute
T Torque [Nm]
t Time [s]
V Voltage [V]
EMF Electromotive Force FEA Finite Element Analysis FEC Field Excitation Coil
FEFSM Field Excitation Flux Switching Machine or Motor FSM Flux Switching Machine or Motor
HEFSM Hybrid Excitation Flux Switching Machine or Motor HEV Hybrid Electrical Vehicles
IMs Induction Motors PM Permanent Magnet
PMFSM Permanent-Magnet Flux Switching Machine or Motor SRM Switched Reluctance Machine or Motor
Kp Filling Factor Effective Area Kd Leakage Factor
Bg / Bpm Permanent-Magnet Magnetic Flux Density Rso Stator Outer Radius
Ф Magnetic Flux
trAC Total Radial Active Component
B Magnetic Flux Density Ae Effective Area
hPR Rotor Pole Height
DW Division Weightage
TP Total Phase
LIST OF PUBLICATIONS
Journals
(i) “Actual prototype analysis floor plan for general electric machine,” ARPN Journal of Engineering and Applied Sciences, Vol. 10, No. 16, pp. 7070-7074. (ii) “OR-HEFSM D-rive developed structure based on actual prototype analysis
(APA) process”, ARPN Journal of Engineering and Applied Sciences, -
(submitted and accepted)
(iii) “Development small scale direct drive 12s-14p OR-HEFSM” Jurnal Teknologi, IPECS 2015, - (submitted and accepted)
Proceeding
LIST OF AWARDS
(i) Silver medal at Malaysia Technology Expo (MTE), International Invention & Innovation, Kuala Lumpur, Malaysia 18 - 20 February 2016.
(ii) Silver medal at Pencipta 2015, Dewan Konvensyen Kuala Lumpur, 4 – 5 December 2015.
(iii) Bronze medal at Seoul International Invention Fair, Korea 26 - 29 November 2015
(iv) Bronze medal at Research & Innovation Festival, UTHM, Malaysia 16 - 17 November, 2015.
(v) Silver medal at Post Graduate Showcase IEEE CENCON 19 – 21 October 2015. (vi) Silver medal at Poster Competition Hari Transformasi Minda FKEE, UTHM
2015.
CHAPTER 1
INTRODUCTION
1.1 Background Introduction
Development of direct-drive motor for in-wheel electric vehicle (EV) has grown into an interesting research topic because of their advantages of direct torque control and elimination of the transmission gear system. At present, the major types of electric motors under serious consideration for EVs are the DC motor, induction motor (IM), permanent magnet synchronous motor (PMSM), and switched reluctance motor (SRM) [1,2]. Based on the extensive review on state-of-the-art electric propulsion systems, it may be observed that investigations on cage IMs and PMSMs are highly dominant [3-5].
In fact, from various types of motors, the flux switching motor (FSM) is a good design to fulfil direct-drive application due to high starting torque, constant power over a wide speed range, low torque ripple, and high durability. The FSM operating principle is quite interesting. This is due to the flux switches from stator pole to rotor tooth and vice versa that made researchers to develop a novel FSM design for various applications ranging from domestic appliances to heavy applications such as electric traction [6, 7].
12S-14P OR-HEFSM design generated torque and power of 335.08 Nm and 160.2 kW, respectively [11].
Theoretically, the design capability has been proven through finite element analysis (FEA) using computer-aided software, JMAG designer. Basically, the analysis is based on numerical input and operating principle without any compromise towards error factor from manufacturing such as mechanical deformation. Therefore, development and fabrication process are required to evaluate the motor performance through prototype units [12]. However, because of cost and tool constraints, the design dimension and volume have been rescaled by ratio 1:8.
To interpret the outer-rotor design into prototype unit, the design needs a few approaches to complete the whole process such as actual prototype analysis (APA) and FEA-based simulation. The APA is created to set a standard procedure to develop and fabricate the design via five stages – design, material selection, fabrication, assembly, and test. All stages of APA come with a specific objective to initiate the process guided by closed loop flow chart to reach high standards in fabrication. Through the last stage of APA, the experimental test has been conducted to finalise all aims in the development and fabrication process [13].
1.2 Problem Statement
In recent research of electric motor drives for EV propulsion, in-wheel direct drive is becoming more popular in diminishing transmission gearing system, and available cabin space can be occupied by more batteries. Thus, this application does not only provide optimal torque directly to the wheel, but also contributes for light vehicle and wider driving range per charge. In considering for higher torque and power densities for the in-wheel drive motors, outer-rotor machine configuration is among the good designs compared with conventional inner-rotor [11].
However, the proposed motor is yet to be validated experimentally. Thus, in this research, a complete process involving design and fabrication of a small-scale 12S-14P OR-HEFSM shall be carried out from the initial stage to the end of experimental validation before it goes for full scale or mass production.
1.3 Objectives
The objectives of this research are as follows:
(i) To optimise and analyse a small-scale design of 12S-14P OR-HEFSM rotor for direct drive structure.
(ii) To develop and fabricate a small-scale design of 12S-14P OR-HEFSM using actual prototype analysis (APA).
(iii) To validate a small-scale design of 12S-14P OR-HEFSM by analytical modelling and experimentation.
1.4 Scopes
The research focuses on optimising and analysing a small-scale prototype of three-phase 12S-14P OR-HEFSM, which will be evaluated by analytical modelling and experimentation. In achieving the research objectives, the followings scopes have been selected:
(i) Guided by a full-scale design of 12S-14P ORHEFSM [11], the design restriction and specification for a designated small-scale design of 12S-14P OR-HEFSM by a ratio of 1:8 are listed in Table 1.1. The FEA process is aided by JMAG Designer 14 software to design and analyse the load and no load conditions. (ii) In developing the small-scale prototype of 12S-14P OR-HEFSM, the APA
approach is used. The approach uses a conversion import file format .DWG from JMAG-Designer to .SLDPRT for SolidWorks V.2014. The 2-D projection from JMAG-Geometry will be ‘boss extruded’ into SolidWorks to generate the 3-D projection.
(iv) In determining whether the APA approach is acceptable for general electric motor fabrication, the collected data of simulation analysis and five stages of APA will be evaluated using subjective evaluation method [14]. The evaluation uses numeric score as weightage factor based on data feedback from motor performance and fabrication qualities.
Table 1.1: Restriction and specification
1.5 Research Contribution
Research contribution throughout this research study are described as follows:
(i) The rotor optimisation and analysis of a small-scale design of 12S-14P OR-HEFSM contributed to the idea on how the rotor design should be developed to suit with direct drive structure. Simultaneously, presenting the analysis of a small-scale 12S-14P OR-HEFSM in terms of back EMF, torque, speed, and power. (Structural and assembly design of outer-rotor hybrid excitation flux switching motor based on finite element analysis approach published in Energy
Conversion (CENCON), 2015 IEEE Conference)
(ii) The APA approach contributes to the systematic flowchart to develop and fabricate the electric motor. Moreover, the APA weightage factor could be used to determine the successfulness of the fabricated prototype. (Actual prototype analysis floor plan for general electric machine, published in ARPN Journal of Engineering and Applied Sciences)
RESTRICTION AND SPECIFICATION
DESCRIPTION OR-HEFSM
Electric
Max. DC-bus voltage inverter (V) 400 Max. DC-bus voltage inverter (V) 400
Max. inverter current (Arms) 50
Max. current density in armature coil, Ja (Arms/mm2)
30
Max. current density in FEC, Je
(A/mm2) 30
Motor
Motor radius (mm) 66
Motor stack length (mm) 35
Shaft/Inner motor radius (mm) 30
Air gap length (mm) 0.4
PM weight (g) 17
(iii) The mathematical modelling for OR-HEFSM using analytical sizing equation contributes to the motor performances prediction in terms of power and torque. (iv) The three-phase fabricated small-scale 12S-14P OR-HEFSM working principle
has been proven experimentally.
1.6 Thesis Outline
This thesis deals with the design studies on OR-HEFSM for HEV applications. The thesis is divided into five chapters. A summary of each chapter is as follows:
(i) Chapter 1: Introduction
This chapter introduces the research background of design and development of a small-scale 12S-14P OR-HEFSM. The contents focus on problems, objectives, scopes, and contributions of the research.
(ii) Chapter 2: Literature review
The review on developing and fabricating the 12S-14P ORHEFSM was divided into three sections. The first section is the introduction of flux switching motor (FSM) while focusing on hybrid excitation FSM. It is followed by the review of fabrication process, which is already established and used by other researchers. The review covers both motor concepts, from inner to outer rotor fabrication. At the end of the chapter is the review of measurement systems and weightage for experimental purpose.
(iii) Chapter 3: Design and analysis of small-scale 12S-14P OR-HEFSM using JMAG-Designer
(iv) Chapter 4: Prototype development of the designed 12S-14P OR-HEFSM using APA
This chapter clarifies the complete process and results based on the second research objective. It is divided into three sections namely development of APA approach, development of small-scale prototype, and development of direct drive prototype. The development of small scale and direct drive prototype has been developed by four stages of APA from 3-D design, material selection, fabrication, and assembly.
(v) Chapter 5: Experimental analysis of a small-scale prototype
This chapter elaborates the experimental analysis of a small-scale prototype of 12-14P OR-HEFSM with respect to simulation configuration. The tool and calculation process have been explained based on analysis. The analysis is divided into three sections namely experimental analysis for no load condition, prediction motor performances based on analytical sizing equation, and weightage analysis.
(vi) Chapter 6: Conclusion and future work
CHAPTER 2
LITERATURE REVIEW
2.1 Flux Switching Motor
The flux switching motor (FSM) incorporates the features of a conventional DC motor and switch reluctance motor (SRM). Similar with conventional motor, the rotor and stator combinations of FSM play a role to drive their operating principle as well as coming out with various designs probability. In 1950, the first FSM was introduced. Structurally it had a large value of permanent magnet usage with less slot area [15]. To overcome the large value of permanent magnet usage and to improve the FSM structure topologies, researchers have tried to figure out the best combination of FSM in terms of thestator-rotor structure and excitation component.
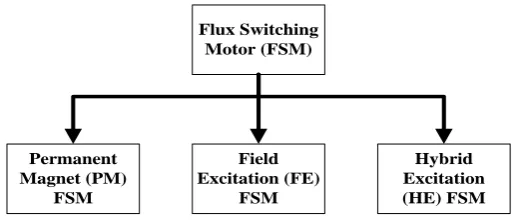
The general classification of FSMs is demonstrated in Figure 2.1, where the permanent magnet (PM) and field excitation (FE) FSMs consist of PM and DC field excitation coil, respectively as their excitation element. The hybrid excitation (HE) FSM consists of the combination of both PM and FE for their flux excitation.
Flux Switching Motor (FSM)
Permanent Magnet (PM)
FSM
Field Excitation (FE)
FSM
[image:25.595.189.449.607.719.2]Hybrid Excitation (HE) FSM
2.1.1 Fundamental of Outer-Rotor HEFSM
The terminology of hybrid can be defined as a combination of two excitation sources, namely field excitation coil (FEC) and permanent magnet (PM) to excite and switch the generated flux from stator pole to rotor tooth, while armature coil as the main flux to interact with excitation source. The operating principle of OR-HEFSM slightly contrasts by modification for the inner rotor position and outer stator position. Even the design seems complex, as it presents a great mechanical advantage such as robust rotor structure that makes it suitable for high-speed applications. In addition, the FEC could be used to control flux with variable flux capabilities [16].
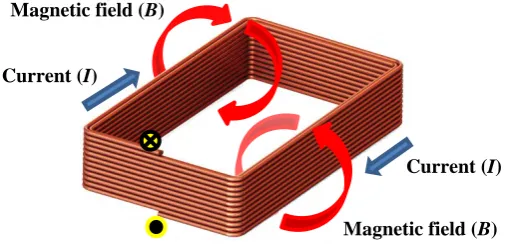
Figure 2.2 illustrates the fundamental electromagnetic concept or right hand screw rule in terms of magnetic field (B) behaviour as the current (I) flows with respect to the current direction. In contrast, the operating principle of OR-HEFSM is illustrated in Figure 2.3 [17, 18]. The single piece of rotor is shown in the upper part, while the stator consisting of PM, FEC, and armature coils are located in the lower part. The PM and FEC are placed between two stator poles to generate excitation fluxes that create the term “hybrid excitation flux”.
[image:26.595.198.452.611.733.2]Figures 2.3 (a) and (b) demonstrate the flux generated by PM and FEC flow from the stator into the rotor and vice versa to produce a complete one flux cycle. The combined flux generated by PM and FEC establishes more excitation fluxes to generate high torque for motor. Moreover, when the rotor moves to the right as shown in Figures 2.3 (c) and (d), the rotor pole goes to the next stator tooth, switching the magnitude and polarities of the flux linkage. The flux shifts clockwise and counter clockwise in direction with each armature current reversal. This condition establishes less excitation flux and generates less torque [19].
Figure 2.2: Fundamental electromagnetic concept
Current (I)
Current (I) Magnetic field (B)
Figure 2.3: Principle operation of OR-HEFSM (a) θe = 0º (b) θe = 180º more excitation, (c) θe = 0º (b) θe = 180º less excitation
2.1.2 Outer-Rotor HEFSM Design
Several researches have been conducted with various probable designs involving the OR-HEFSM operating principle as illustrated in Figures 2.4 and 2.5. Figure 2.4 (a) shows the combination of single-phase 8S-4P OR-HEFSM, which produced a great result for the initial design [20], while Figure 2.4 (b) shows the design improvement [21] using optimisation process that successfully achieved much higher performances than the initial design. The torque and power performance of both initial and optimised designs are illustrated in Figure 2.5. It is obvious that the torque and power increased approximately 22.1% and 59.5%, respectively.
PM PM
Armature coil Armature coil Armature coil Armature coil
FEC FEC
N S N S
Stator Stator
Rotor Rotor
PM Armature coil Armature coil Armature coil Armature coil
FEC FEC
N S N S
Stator Stator
Rotor Rotor
(a) (b)
(c) (d)
PM flux flow
PM flux flow FEC flux flow
FEC flux flow FEC flux flow
FEC flux flow
PM flux flow
(a) (b)
Figure 2.4: Design of 8S-4P OR-HEFSM (a) Initial design, (b) Improved [21]
(a) (b)
Figure 2.5:Performance of 8S-4P OR-HEFSM (a) Torque, (b) Power [21]
In 2014, the initial three0phase 12S-14P OR-HEFSM was proposed, as illustrated in Figure 2.6. The proposed motor produced a great performance in terms of torque and power, as illustrated in Figure 2.7. Meanwhile, Figure 2.8 illustrates the structural comparison of the final design for the initial and optimised design of the proposed motor. It is obvious that the stator and rotor structures of the final design have improved the flux flow capability and magnetic flux density. Deterministic optimisation approach is used to improve the torque and power performances of the initial design. The torque characteristic at various Je and Ja of the final design is
[image:28.595.120.517.286.432.2]Figure 2.6: Initial design of three-phase 12S-14P OR-HEFSM [22]
Figure 2.7: Torque versus Jeof initial design 12S-14P OR-HEFSM [22]
(a) (b)
Figure 2.8: Comparison of 12S-14P OR-HEFSM (a) Initial, (b) Improved [22]
Improved point Initial
[image:29.595.163.496.538.714.2]Figure 2.9: Torque versus Je of the improved design 12S-14P OR-HEFSM [22]
2.2 Fabrication of Motor Design
The term fabrication has been defined as an act or process to construct something new or already in the market based on sketching. Electric motors are one of the great things fabricated by Moritz Jacobi in 1834. Designers have used a few elements such as copper wire winding isolated by shellac, square shaft iron, and magnet [23-27]. The basic structure for electric motor design is still used in modern times with a few improvements in design, concept, size, material, power source, and many more to achieve various targets in industrial civilisation.
There are two types of popular structure in motor design: inner-rotor and outer-rotor motors. However, research on motor design to date has been focusing mainly on general electromagnetic analysis and optimisation of the inner-rotor type, with hardly any attention given to the outer-rotor motor [28-30]. This happened because the market needed an inner-rotor design and the design is easy to be fabricated even with a complex design.
2.2.1 Prototype of Inner-Rotor Design
this design concept is the cheapest at the moment due to its simple design structure and ease of fabrication.
[image:31.595.135.504.277.425.2]There are few inner rotor types such as interior permanent magnet synchronous motor (IPMSM), switch reluctant motor (SRM), and flux switching motor (FSM). The design in Figure 2.10 shows a PM brushless stator core made by the precision machining from a cylindrical piece of soft magnetic composite (SMC). The rotor consists of four arc-shaped with surface mounted by magnet segments with a solid mild steel back-iron. The prototype machine has an unusually large air gap of 6.5 mm compared with its 2.5 mm magnet thickness [31].
Figure 2.10: PM brushless prototype design using SMC [31]
Figure 2.11: PM mini motor using low cost fabrication technic [32]
Although the 3-D dimension has been developed, the complete process in fabrication is still vague due to secondary manufacturers’ usage such as in fabrication process for PM synchronous motor (PMSM) [33]. The PMSM design as depicted in Figure 2.12 shows the design process as initiated by taking the dimensions of an existing stator lamination of an induction motor. This was done to reduce tool cost and required time when developing the motor.
[image:32.595.119.516.428.550.2](a) (b)
Figure 2.12: PMSM design (a) Stator, (b) Rotor [33]
for EV with 18 stator poles, 12 rotor poles, and three-phase windings with 50 kW of power [35].
Figure 2.13: PM design axial-flux direct drive for scooter [34]
(a) (b)
Figure 2.14: 18S-12P SRM design for EV (a) Stator, (b) Rotor [35]
[image:33.595.118.513.376.559.2](a) (b)
Figure 2.15: FSM design based on TSFE (a) Stator, (b) Rotor [36]
Figure 2.16: Electromagnetic wave of FSM design based on TSFE [36]
[image:34.595.193.437.287.448.2](a) (b)
[image:35.595.137.502.71.439.2](c) (d)
Figure 2.17: Complete fabrication of 12S-10P WFFSM (a) Stator, (b) FEC winding, (c) Full assembly stator and rotor, (d) Prototype with water cooling jacket [37]
2.2.2 Prototype of Outer-Rotor Design
Figure 2.18: Complete fabrication of outer-rotor PMSM [38]
Figure 2.19: Complete 3-D design of outer-rotor PMFSM [39]
[image:36.595.200.433.318.486.2]Figure 2.20: Complete design of outer-rotor PMSM for wind turbine [40]
Although the torque and power results shows close agreement between experimental and predicted results, it still has not satisfied the FEA performance. A few demerits include materials for fabrication and the method of fabrication itself, perhaps making the experimental prototype slightly come off from the FEA result. It is noteworthy that a proper consideration in material and fabrication process is needed for further experimentation.
Most of the prototypes that have been presented produced efficiencies above 90%, but there are also publications where the efficiency is rather low, mainly caused by various unfavourable aspects in the physical assembly of the prototype and the remaining loss was claimed to be mechanical loss [40-42].
2.3 Prototype Experimental 2.3.1 Measurement System
The motor measurement system consideration should abide by motor and measurement classifications. This consideration is mostly based on the motor capability measurement system to provide accurate and constant measurement as well as to avoid unexpected event. In fact, only the high-end motor measurement system is able to provide high-end results, which are quite expensive to begin with.
analyse and record the measurements. Indeed, the outcomes are precise in certain parts, but are still unable to measure a complete performance of PM brushless.
[image:38.595.182.456.240.392.2]Meanwhile, Figures 2.21 and 2.22 show the brushless DC motor created by Koji Ikeda [42], which has been analysed using different measurement systems. The employed no-load load property systems in both figures are able to provide a complete result of the motor’s characteristics. The combination of both no-load and load analysis measurement systems will increase the measurement accuracy for certain applications.
Figure 2.21: No-load property measurement system [42]
Figure 2.22: Load property measurement system [42]
[image:38.595.182.457.441.607.2]diagram for this type of measurement system has been illustrated in Figure 2.24 in terms of measurement device and connection.
[image:39.595.178.462.131.293.2]Figure 2.23: Experiment set up for motor measurement system [43]
Figure 2.24: Equivalent block diagram motor of measurement system in Figure 2.23
2.3.2 Weightage in Fabrication
The weightage has been derived from a perspective view of a preliminary investigation to predict the final effect of fabrication either in objective or subjective point. Basically, in subtract or multiple variable into a weightage ratio, the mathematical modelling such as fuzzy systems is needed to obtain precise weightage calculation. In contrast, the weightage is derived subjectively or by interpolative decision making [44]. This method is used in weightage transformation from variable such as dimension deformation into a ratio.
Different product topology and application lead to new variables in a weightage calculation. So, a few considerations are needed to conclude the variables into a
Prime mover FEFSM
Controller
Armature Power
supply FE Power
supply Oscilloscope
qualitative or quantity ratio, which are used to calculate the weightage. By computing the weightage based on preliminary result the final performance of model can be predicted [45]. This technique is also useful to evaluate some model performances that cannot be measured such as flux distribution.
In motor design, a common weightage is usually used in winding calculation with respect to allocated winding space, known as filling factor. The ratio ranges between zero to one by considering one of them as a high filling factor in motor design. The factor is used to predict the outcome number for the turn of windings by multiplying the factor with the winding equation [46]. Simultaneously, the filling factor becomes one of the variables in fabrication weightage. The input and output of filling factor can be evaluated as winding variables in defining the full fabrication weightage [47].
2.4 Summary
CHAPTER 3
DESIGN AND ANALYSIS OF SMALL SCALE 12S-14P OR-HEFSM USING JMAG DESIGNER
3.1 Design of Small-Scale 12S-14P OR-HEFSM
Finite element analysis (FEA) based on JMAG Designer version 14.1 is used to design a small-scale 12S-14P OR-HEFSM before the analysis and fabrication process. The software can give the user substantially greater insight into design performance while providing versatility to support users from conceptual design to comprehensive analysis.
START Sketch of Rotor Sketch of Stator Sketch of Armature coil Sketch of FEC Set materials Set the conditions Set the circuits
Set the mesh & study properties Run and Simulate END Sketch of Permanent Magnet GEOMETRY EDITOR DESIGNER No-Load analysis:
a. Coil test
b. Flux strengthening / weakening
c. Flux distribution
d. Flux lines
e. Electromotive force (EMF)
f. Cogging torque
Load analysis:
a. Torque versus Je/Ja
b. Torque versus speed
c. Power versus speed
d. Iron loss, copper loss, eddy current lost
e. Efficiency
f. Mechanical strength
[image:42.595.151.513.66.579.2]Success Simulation data YES NO Success YES NO 1 1
Figure 3.1: Flowchart of JMAG geometry editor and design
3.1.1 Part 1: Main Component of Rotor and Stator Design
REFERENCES
[1] Veldman E. Verzijlbergh R.A., "Distribution grid impacts of smart electric vehicle charging from different perspectives”, Smart Grid, IEEE Transactions”, Vol. 6, No. 1, pp. 333-342, Jan. 2015
[2] J. Malan, M. J. Kamper, “Performance of a hybrid electric vehicle using reluctance synchronous machine technology”, IEEE Trans. Ind. Appl.,
Vol. 37, No. 5, pp. 1319-1324, Sep./Oct. 2001
[3] M. Kamiya, “Development of traction drive motors for the Toyota hybrid systems”, IEEJ Trans. Ind. Appl., Vol. 126, No. 4, pp. 473-479, Apr. 2006
[4] M.A. Rahman, “IPM motor drives for hybrid electric vehicles”,
International Aegean Conference on Electrical Machines and Power
Electronics, Sept. 2007
[5] Wada N., Momma, N. Miki I., "Rotor position estimation method in high speed region for 3-phase SRM used in EV," Electrical Machines and Systems (ICEMS), 2012 15th International Conference, pp. 15, 21-24 Oct. 2012
[6] E. Sulaiman, T. Kosaka, N. Matsui, “Design optimisation and performance of a novel 6-Slot 5-Pole PMFSM with hybrid excitation for hybrid electric vehicle”, IEEJ Trans. on Industry Appl., Vol. 132, No. 2, Sec. D, pp.
211-218, 2012
[8] E. Sulaiman, M. F. M. Teridi, Z. A. Husin, M. Z. Ahmad, T. Kosaka, “Performances comparison of 24S-10P and 24S-14P field excitation flux
switching machine (FEFSM) with single DC-coil polarity”, International Journal of Energy & Power Engineering Research, Vol. 1, pp. 24-31, Dec 2013
[9] Ahmad M.Z., Sulaiman E., Khan F., Haron Z.A., "Design and performance analysis of 12Slot-14Pole HEFSM with outer-rotor configuration", Power
Engineering and Optimisation Conference (PEOCO), 2014 IEEE 8th
International, pp. 369-374, 24-25 March 2014
[10] Md Zarafi Ahmad, Erwan Sulaiman, “An Outer-Rotor Hybrid Excitation Flux Switching Machine”, I.P. PI2014702932, December 2014
[11] M. Z. Ahmad, E. Sulaiman, Z. A. Haron, T. Kosaka, "Design improvement of a new outer-rotor hybrid excitation flux switching motor for in-wheel drive EV," Power Engineering and Optimisation Conference (PEOCO), 2013 IEEE 7th International, Langkawi, pp. 298-303, 2013
[12] Zhu Z., “Switched flux permanent magnet machines-Innovation continues”, Electrical Machines and Systems (ICEMS), Beijing, China,
August 20-23 2011
[13] E. Sulaiman, “Less Rare-Earth and High Power Density Flux Switching Motor for HEV Drives”, International Conference on Electrical machine
ICEM, pp. 15-23, June 2012
[14] G. Chen, W. Zhang, Z. Gong and W. Sun, "A new approach to vehicle shift quality subjective evaluation based on fuzzy logic and evidence theory," 4th IEEE Conference on Industrial Electronics and Applications, Xi'an, 2009, pp. 2792-2795
[16] Muhammad S. Syed N., Sulaiman E., Mubin M. Mazlan, A. Husin Z. A., “Initial design of 12S-10P and 12S-14P with outer- rotor field-excitation flux switching machine”, The 2nd Power and Energy Conversion
Symposium (PECS). May 12. Melaka, Malaysia, pp. 177-181, 2014 [17] X. D. Xue, "Study of motoring operation of in-wheel switched reluctance
motor drives for electric vehicles," Power Electronics Systems and Applications, PESA 2009, 3rd International Conference on, Hong Kong,
2009
[18] Hansen, K. L., “The rotating magnetic field theory of AC. motors”,
Transactions of the American Institute of Electrical Engineers, pp. 170-178, 2013
[19] Ahmad M.Z., Sulaiman E., Jenal M., Utomo, W.M. Zulkifli, S.A. Bakar A, “Design investigation of three phase HEFSM with outer-rotor
configuration, IEEE Conference on Clean Energy and Technology (CEAT). November 18-20. Langkawi, Malaysia, pp. 220-225, 2013 [20] Mazlan M.M.A., Sulaiman E., Kosaka T., "Design study of single phase
outer-rotor hybrid excitation flux switching motor for hybrid electric vehicles," Power Engineering and Optimisation Conference (PEOCO), 2014 IEEE 8th International, pp. 138-143, 24-25 March 2014
[21] Aizat Mazlan M.M., Sulaiman E., Ahmad M.Z., Naufal S. Othman S.M., "Design optimisation of single-phase outer-rotor hybrid excitation flux switching motor for electric vehicles," Research and Development (SCOReD), 2014 IEEE Student Conference, Vol. 1, No. 6, pp. 16-17 Dec. 2014
[22] Ahmad M.Z., Sulaiman E., Kosaka T., "Optimisation of outer-rotor hybrid excitation FSM for in-wheel direct drive electric vehicle," Mechatronics (ICM), 2015 IEEE International Conference, Vol. 691, No.696, pp. 6-8 March 2015
[23] M. Jacobi, "Memoire Sur l'application de pelectro magnetisme au movement de machines", Book, Vol. 1, Paris 1875
[25] Eckermann Erik, “World history of the automobile”, Book, published by SAE, pp. 18-19. ISBN 0-7680-0800-X, retrieved, May 2011
[26] Calvert, J. B., "Jacobi's theorem or the maximum power transfer theorem, misunderstanding of it retarded development of dynamos". Article, March 30, 2001
[27] Leksono E., Haq. I.N., Iqbal M., Soelami F.X.N., Merthayasa I.G.N., "State of charge (SoC) estimation on LiFePO4 battery module using Coulomb counting methods with modified Peukert”, Rural Information & Communication Technology and Electric-Vehicle Technology (rICT &
ICeV-T), Joint International Conference, Vol. 1, No. 4, pp. 26-28 Nov. 2013
[28] Rasmussen P.O., Frandsen T.V., Jensen K.K., Jessen K., "Experimental evaluation of a motor integrated permanent magnet gear," Energy Conversion Congress and Exposition (ECCE), 2011 IEEE, pp. 3982-3989, 17-22 Sept. 2011
[29] T. Wang, “Design characteristics of the induction motor used for hybrid electric vehicle,” IEEE Trans. Magn., Vol. 41, No. 1, pp. 505-508, Jan.
2005
[30] Yi Tang Dexuan Zhu, Chi Jin, Peng Wang, Blaabjerg F., "A three-level quasi-two-stage single-phase PFC converter with flexible output voltage and improved conversion efficiency," Power Electronics, IEEE Transactions, Vol. 30, No. 2, pp. 717-726, Feb. 2015
[31] G. S. Liew, W. L. Soong, N. Ertugrul, J. Gayler, "Analysis and performance investigation of an axial-field PM motor utilising cut amorphous magnetic material," Universities Power Engineering Conference (AUPEC), 2010 20th Australasian, Christchurch, pp. 1-6, 2010
[33] Paitandi S., Sengupta M., "Design, fabrication and parameter evaluation of a surface mounted permanent magnet synchronous motor", Power Electronics, Drives and Energy Systems (PEDES), 2014 IEEE
International Conference, Vol. 1, No. 6, pp. 16-19, Dec. 2014
[34] Caricchi F., Crescimbini F., Fedeli E., Noioa G., "Design and construction of a wheel-directly-coupled axial-flux PM motor prototype for EVs",
Industry Applications Society Annual Meeting, 1994., Conference Record
of the 1994 IEEE, Vol. 1, pp. 254-261 Oct. 1994
[35] Kano Y., "Recent technical trends in SRM and FSM", Power Electronics Conference (IPEC-Hiroshima 2014 - ECCE-ASIA), International, pp. 2004-2010, 18-21 May 2014
[36] Daohan Wang, Xiuhe Wang, "Modeling and analysis on flux switching motor based on time stepping finite element", Power and Energy Engineering Conference (APPEEC), 2010 Asia-Pacific, Vol. 1, No. 4, pp. 28-31, March 2010
[37] Bin Sulaiman E., Kosaka T., Matsui, N., "Design study and experimental analysis of wound field flux switching motor for HEV applications",
Electrical Machines (ICEM), 2012 XXth International Conference, pp. 1269-1275, 2-5 Sept. 2012
[38] Rasmussen P.O., Frandsen T.V., Jensen K.K., Jessen K., "Experimental evaluation of a motor integrated permanent magnet gear", Energy Conversion Congress and Exposition (ECCE), 2011 IEEE, pp. 3982-3989, 17-22 Sept. 2011
[39] Weizhong Fei, Luk P.C.K., Jian Xin Shen, Yu Wang, Mengjia Jin, "A novel permanent-magnet flux switching machine with an outer-rotor configuration for in-wheel light traction applications", Industry Applications, IEEE Transactions, Vol. 48, No. 5, pp. 1496-1506, Sept.-Oct. 2012
[41] Liew G.S., Ertugrul N., Soong W.L., Gehlert D.B., "Analysis and performance evaluation of an axial-field brushless pm machine utilising soft magnetic composites", Electric Machines & Drives Conference, 2007. IEMDC '07. IEEE International, Vol. 1, pp. 153-158, May 2007
[42] Ikeda K., Dohmeki H., "Study on improvement in the motor property by the difference in the fabrication density of the soft magnetic composite",
Electrical Machines (ICEM), 2012 XXth International Conference, pp. 784-788, Sept. 2012
[43] W. Fei, P. C. K. Luk, J. Ma, J. X. Shen, G. Yang, "A high-performance line-start permanent magnet synchronous motor amended from a small industrial three-phase induction motor", IEEE Transactions on Magnetics, Vol. 45, No. 10, pp. 4724-4727, Oct. 2009
[44] S. M. Chen, Y. K. Ko, Y. C. Chang, J. S. Pan, "Weighted fuzzy interpolative reasoning based on weighted increment transformation and weighted ratio transformation techniques", IEEE Transactions on Fuzzy Systems, Vol. 17, No. 6, pp. 1412-1427, Dec. 2009
[45] Bouscayrol, M. Pietrzak-David, P. Delarue, R. Pena-Eguiluz, P. E. Vidal and X. Kestelyn, "Weighted control of traction drives with parallel-connected AC machines", IEEE Transactions on Industrial Electronics, Vol. 53, No. 6, pp. 1799-1806, Dec. 2006
[46] S. Makita, Y. Ito, T. Aoyama, S. Doki, "The proposal of a new motor which has a high winding factor and a high slot fill factor", Power Electronics Conference (IPEC-Hiroshima 2014 - ECCE-ASIA),
International, Hiroshima, pp. 3823-3827, 2014
[47] C. Hogmark, R. Andersson, A. Reinap and M. Alaküla, "Electrical machines with laminated winding for hybrid vehicle applications",
Electric Drives Production Conference (EDPC), 2nd International,
Nuremberg, 2012
[48] K. C. Kim, K. Y. Sung and S. J. Hwang, "A study on the performance of three phase induction motor with rectangle stator core," Electrical Machines and Systems (ICEMS), 2010 International Conference on,
[49] H. Park, H. Hong, Y. Oh, J. Lee and J. Lee, "Motion analysis and control of the hybrid multi-DOF motor with taking account on design of motor shape," 2015 IEEE Magnetics Conference (INTERMAG), Beijing, 2015, pp. 1-1
[50] K. Cakir and A. Sabanovic, "In-wheel motor design for electric vehicles,"
9th IEEE International Workshop on Advanced Motion Control, 2006.,
Istanbul, 2006, pp. 613-618
[51] C. H. Yoo, D. K. Lim, D. K. Woo, J. H. Choi, J. S. Ro and H. K. Jung, "A New Multimodal Optimization Algorithm for the Design of In-Wheel Motors," in IEEE Transactions on Magnetics, vol. 51, no. 3, pp. 1-4, March 2015
[52] Xu Yafeng, Zhang Yubo and Zhao Xin, "Research on L-shaped concrete-filled steel tube core columns mechanical properties under eccentric,"
Electric Technology and Civil Engineering (ICETCE), 2011 International
Conference on, Lushan, 2011, pp. 605-608
[53] S. J. Pronin, "Realization of Universal Structural System of Dvornikov L.T. Concerning Solving the Problems of Structural Synthesis of Spatial Mechanisms," Modern Technique and Technologies, 2005. MTT 2005. 11th International Scientific and Practical Conference of Students,
Post-graduates and Young Scientists, Tomsk, 2005, pp. 65-66
[54] Yu Wang, Huiming He, Jiayin Wang and Baodong Bai, "Research of novel water cooling jacket for explosion-proof motor," Electrical Machines and Systems (ICEMS), 2013 International Conference on, Busan, 2013, pp. 691-694
[55] B. Altinoz, D. Unsal, "Look up table implementation for IMU error compensation algorithm", Position, Location and Navigation Symposium - PLANS 2014, IEEE/ION, Monterey, CA, pp. 259-261, 2014
[57] Alali, M. Kubat, "PruDent: A pruned and confident stacking approach for multi-label classification", IEEE Transactions on Knowledge and Data Engineering, Vol. 27, No. 9, pp. 2480-2493, Sept. 1 2015
[58] K. M. Rajan, K. Narasimhan, “An approach to selection of material and manufacturing processes for rocket motor cases using weighted performance index”, Journal of Materials Engineering and Performance,
Vol. 11, No. 4, pp. 444, 2012
[59] Prasenjit Chatterjee, Vijay Manikrao Athawale, Shankar Chakraborty, “Materials selection using complex proportional assessment and evaluation of mixed data methods”, Journal Materials & Design, 2011,
Vol. 32, No. 2, pp. 85, 2011
[60] N. Raabe, "An algorithm for the filling factor calculation of electrical machines standard slots", Electrical Machines (ICEM), 2014 International Conference on, Berlin, pp. 981-986, 2014
[61] K. Yamazaki, S. Shinfuku, "Combined 3-D-2-D finite element analysis of induction motors considering variation of neutral point potential in star connection", IEEE Transactions on Magnetics, Vol. 37, No. 5, pp. 3706-3710, Sep 2001
[62] Y. Gao et al., "Loss Reduction of Reactor With Grain-Oriented Silicon Steel Plates," in IEEE Transactions on Magnetics, vol. 49, no. 5, pp. 1973-1976, May 2013
[63] Fan Tao, Luo Jian, Wen Xuhui and Liao Xiaofeng, "A new sizing equation and it's application in electrical machine design," Electric Information and Control Engineering (ICEICE), 2011 International Conference on,
Wuhan, 2011, pp. 3890-3893
[64] Shihua Wu, Weiwei Fan and Shumei Cui, "Sizing equations suitable for driving motor initial design," Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), 2014 IEEE Conference and Expo, Beijing, 2014, pp. 1-3
[66] W. Fei, P. C. K. Luk, J. X. Shen, Y. Wang and M. Jin, "A Novel Permanent-Magnet Flux Switching Machine With an Outer-Rotor Configuration for In-Wheel Light Traction Applications," in IEEE Transactions on Industry Applications, vol. 48, no. 5, pp. 1496-1506, Sept.-Oct. 2012
[67] Rowland H., Phil. Mag, “Text Book of Magnetism” by Publishing House (4), vol. 46, 1873, p. 140
[68] M. Kostelníková, M. Ožvoldová and M. Ožvoldová, "Faraday's Law via e-experiments as an example of inquiry-based learning," Interactive Collaborative Learning (ICL), 2012 15th International Conference on, Villach, 2012, pp. 1-5
[69] U. Sarwar, M. B. Muhammad, Z. A. Abdul Karim, "Time series method for machine performance prediction using condition monitoring data",
Computer, Communications, and Control Technology (I4CT),
![Figure 2.5: Performance of 8S-4P OR-HEFSM (a) Torque, (b) Power [21]](https://thumb-us.123doks.com/thumbv2/123dok_us/8760138.893882/28.595.181.457.72.235/figure-performance-s-p-hefsm-torque-b-power.webp)
![Figure 2.8: Comparison of 12S-14P OR-HEFSM (a) Initial, (b) Improved [22]](https://thumb-us.123doks.com/thumbv2/123dok_us/8760138.893882/29.595.250.427.76.261/figure-comparison-s-p-hefsm-initial-b-improved.webp)
![Figure 2.9: Torque versus Je of the improved design 12S-14P OR-HEFSM [22]](https://thumb-us.123doks.com/thumbv2/123dok_us/8760138.893882/30.595.191.452.79.251/figure-torque-versus-je-improved-design-s-hefsm.webp)
![Figure 2.10: PM brushless prototype design using SMC [31]](https://thumb-us.123doks.com/thumbv2/123dok_us/8760138.893882/31.595.135.504.277.425/figure-pm-brushless-prototype-design-using-smc.webp)
![Figure 2.11: PM mini motor using low cost fabrication technic [32]](https://thumb-us.123doks.com/thumbv2/123dok_us/8760138.893882/32.595.183.457.71.238/figure-pm-mini-motor-using-cost-fabrication-technic.webp)
![Figure 2.14: 18S-12P SRM design for EV (a) Stator, (b) Rotor [35]](https://thumb-us.123doks.com/thumbv2/123dok_us/8760138.893882/33.595.221.397.143.316/figure-s-srm-design-for-ev-stator-rotor.webp)
![Figure 2.15: FSM design based on TSFE (a) Stator, (b) Rotor [36]](https://thumb-us.123doks.com/thumbv2/123dok_us/8760138.893882/34.595.193.437.287.448/figure-fsm-design-based-on-tsfe-stator-rotor.webp)
