ABSTRACT
ORTIZ, CARLOS POMPEYO. Rigidity Of Microsphere Heaps. (Under the direction of Karen Daniels and Robert Riehn.)
Rigidity emerges in a broad class of soft matter systems, relevant to many industrial and biolog-ical processes. In our experiments, we study a model soft matter system, hard-sphere Brownian
suspensions of submicron particles. Brownian suspensions lack rigidity in the absence of external
driving, but form flow-stabilized solid-like microsphere heaps under the influence of hydrodynamic forces. The overarching question driving my dissertation is "What is the nature of the rigidity of
these microsphere heaps?" Does the rigidity of the heaps follow from mechanical stability driven by
a sufficiently interconnected network of particle contacts? Or, does the rigidity of the heaps follow from a kinetic glass transition characterized by a diverging resistance to flow such that the time
necessary to observe rearrangements grows prohibitively large? We expect that insights into the
mechanism of rigidity of Brownian microsphere heaps are applicable to a wide class of soft matter systems.
In this thesis, we have overcome the limitations of previous experimental approaches. Namely,
we show that the rigidity of our heaps does not emerge from the effects of gravity, inertia, static friction, or van der Waals sticking. In Chapter 1 of thesis, we review the background literature.
In Chapter 2, we present the experimental, analytical, and computational methods used in the
remainder of the thesis. In Chapter 3, we investigate the onset of rigidity by characterizing the steady-state size of the heap versus the imposed flow conditions. We show that thermal fluctuations
and repulsive interparticle interactions, the dominant forces at the single-particle scale, suppress
the development of a rigid phase. These conditions imply that the onset of rigidity in involves many-body collective interactions. In Chapter 4, we measure the response of the heap to external
perturbations, which allows us to measure their elastic modulus and compare our results to hard
sphere theoretical expectations. We find bulk nonlinear elastic behavior. In Chapter 5, we study the particle displacements in response to external perturbations and quantify the local nonlinear
© Copyright 2013 by Carlos Pompeyo Ortiz
Rigidity Of Microsphere Heaps
by
Carlos Pompeyo Ortiz
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Doctor of Philosophy
Physics
Raleigh, North Carolina
2013
APPROVED BY:
Albert Young Michael Shearer
Karen Daniels
Co-chair of Advisory Committee
Robert Riehn
DEDICATION
BIOGRAPHY
I was born in Buenaventura, a port-city in Colombia, on May 29, 1986. I moved to Columbia, SC, on the Spring of 2002, where I attended Irmo High School. The origin of my interest in experimental soft
matter began during my high school AP Chemistry lab experiments, where I developed an interest
in polymers and pursued curiosity-driven research on polymer flame tests. These studies enabled me to compete at the state and then the national level on the “Polymer Detectives” event of the High
School Science Olympiad on the Spring of 2003. That May, I received an Extended Studies Diploma from Irmo High School.
Four years later, I received a B.S. in Physics degree from Davidson College, NC. During my
undergraduate degree, my enthusiasm for experimental research grew while taking Electronics and Instrumentation, taught by Dan Boye. I went on to do research in his lab during the summer of 2006,
studying rare-earth doped sol-gel glasses. During my senior year, I decided to continue the research,
culminating in the writing of an honors thesis about the coupling between the structural properties of a disordered porous material, a sol-gel glass, and the spectral properties of rare-earth atoms and
rare-earth atom clusters dispersed throughout the glass.
During my senior year, I also won the Hearst Teaching Fellowship which allowed me to explore my sentiments for teaching as a profession by teaching Spanish for a year at Charlotte Country Day
School, an independent school. After teaching for a year, I decided to pursue a PhD in physics at
North Carolina State University. My advisors, Karen Daniels and Robert Riehn, allowed me to join the lab and do exploratory research on the summer of 2008, prior to my first semester graduate
classes. The results and insights from that summer allowed me to write a coherent research proposal
for the NSF Graduate Fellowship, which funded the bulk of my PhD after the spring of 2008. During my PhD, I presented my work in the form of posters and talks at local, regional and
national conferences and workshops: Triangle Soft Matter, SESAPS, DFD, NSHP, GRC, APS. I was
a teaching assistant for laboratories using the Matter and Interactions curriculum developed by physics faculty at NCSU. I was also the teaching assistant for Electronics and Senior Lab. I was a
grader for both introductory physics courses and two first year graduate classes (classical mechanics
ACKNOWLEDGEMENTS
First, I would like to thank my professional colleagues, friends, and family, all of whom helped make this thesis possible, whether they realize it or not. I would like to thank my mother for allowing
me to tear apart even my most expensive toys, under the claim that I could rebuild them and
make them “work better.” I would especially like to thank my wife for believing in me and for her loving support during all the holiday-weekend experiments, the midnight paper revisions, and the
restaurant-napkin scribbling.
I would like to thank my advisors, Karen Daniels and Robert Riehn, not just for all their guidance
on thehowof doing experiments, but more importantly all their guidance on thewhysthat allow
you to reason and make decisions from your results. I am also deeply grateful for the many forms of mentoring they gave me, on teaching, writing, speaking, and others.
There are several faculty members in the department who graciously allowed me to use their
equipment, several technical and support staff members who went the extra mile to help me achieve a specific goal, several graduate students both in our groups and outside or groups who have made
contributions through our discussions. There are too many of these instances to list them all, which
is just a testament of the large degree of comradery that we enjoy in our Department.
I would like to end by thanking every single person who has or will read this thesis. I hope you
enjoy reading about the research as much as I enjoyed my time doing it.
TABLE OF CONTENTS
LIST OF TABLES . . . .viii
LIST OF FIGURES. . . ix
Chapter 1 INTRODUCTION AND BACKGROUND . . . 1
1.1 What is Soft Matter? . . . 2
1.2 Motivating Questions . . . 5
1.3 Preview of Research . . . 6
1.4 Theories of Rigidity . . . 8
1.4.1 Glass Transition . . . 9
1.4.2 Maxwell’s Rigidity Criterion . . . 10
1.4.3 Critique of Mode Coupling Theory . . . 13
1.5 Hard Sphere Colloids . . . 14
1.5.1 Introduction to Colloids . . . 15
1.5.2 Single particle in a fluid . . . 16
1.5.3 Interparticle Interactions . . . 18
1.5.4 Bulk modulus from DLVO potential . . . 22
1.5.5 Steric stabilization: non-DLVO forces . . . 22
1.5.6 Our Interparticle Potential . . . 24
1.6 Phase Diagram of Hard Spheres . . . 28
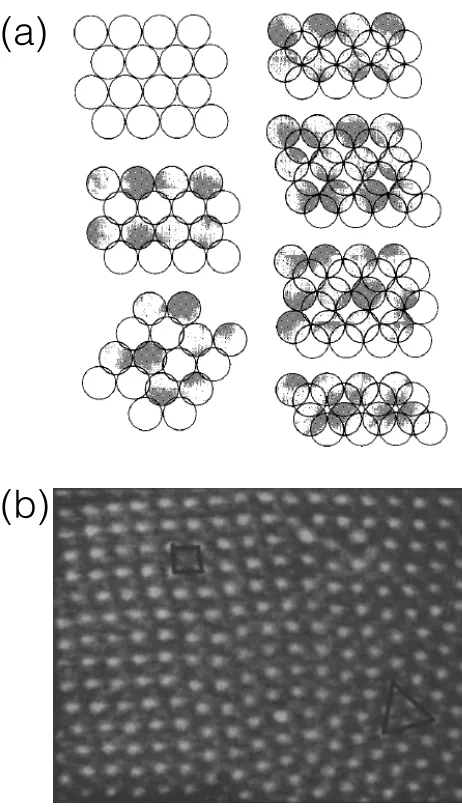
1.6.1 Order in Hard Spheres and Disks . . . 30
1.6.2 Two-dimensional melting . . . 31
1.6.3 Quasi Two Dimensional . . . 35
1.6.4 Polydispersity suppresses crystal formation . . . 39
Chapter 2 METHODS AND INSTRUMENTATION . . . 41
2.1 General Considerations . . . 41
2.2 Device Assembly . . . 42
2.2.1 Device Layout . . . 43
2.2.2 Photolithography, Etching, and Sandblasting . . . 45
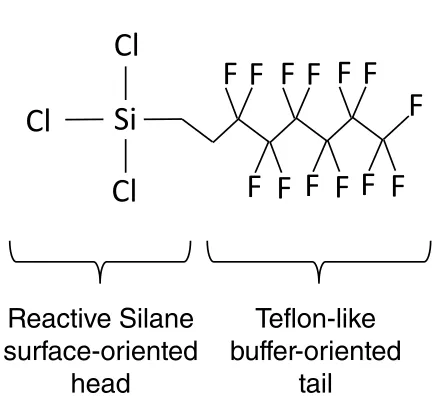
2.2.3 Silanization . . . 49
2.2.4 Bonding with PDMS coverglass . . . 52
2.2.5 Holder design . . . 55
2.2.6 Assembly Verification . . . 55
2.3 Characterization . . . 58
2.3.1 Sizing by DLS . . . 58
2.3.2 Zeta Potential by Zetasizer . . . 59
2.3.3 Density Matching . . . 60
2.4 List of Setups Used . . . 64
2.5 Imaging . . . 66
2.5.1 Acquiring Images with Charged Coupled Devices (CCDs) . . . 66
2.5.3 Resolution . . . 68
2.5.4 Pixel size . . . 68
2.6 Image Analysis Methods . . . 72
2.6.1 Image Stitching . . . 72
2.6.2 Image Denoising . . . 72
2.6.3 Wiener Deconvolution . . . 73
2.6.4 Particle Tracking . . . 73
2.7 Hydrodynamics . . . 73
2.7.1 Hydrodynamics in microfluidic devices . . . 74
2.7.2 Flow in a Hele-Shaw Cell . . . 75
2.7.3 Equations of motion for hard sphere suspension in Hele-Shaw . . . 75
2.8 Fluid Stress on Microheap . . . 77
2.8.1 Calculation of Stress on the Heap . . . 80
2.8.2 Heap Permeability . . . 81
Chapter 3 ANGLE OF REPOSE. . . 84
3.1 Abstract . . . 84
3.2 Introduction . . . 85
3.3 Experimental Setup . . . 86
3.4 Results . . . 89
3.5 Discussion . . . 96
3.6 Acknowledgements . . . 99
Chapter 4 NONLINEAR ELASTICITY . . . .100
4.1 Abstract . . . 100
4.2 Introduction . . . 100
4.3 Experimental Setup . . . 101
4.4 Results . . . 103
4.5 Discussion . . . 109
4.6 Acknowledgements . . . 111
Chapter 5 NON-AFFINE DEFORMATIONS. . . .113
5.1 Abstract . . . 113
5.2 Introduction . . . 113
5.3 Experimental Setup . . . 115
5.4 Methods . . . 119
5.4.1 Large Timestep Affine Field . . . 119
5.4.2 Large Timestep Particle Tracking . . . 120
5.4.3 Small Timestep Particle Tracking . . . 120
5.5 Results . . . 124
5.5.1 Total Non-affine Response . . . 124
5.5.2 Dynamic Rearrangements . . . 130
5.6 Discussion . . . 143
Chapter 6 CONCLUSIONS AND FUTURE WORK . . . .148
6.1 Summary . . . 148
6.2 Future Work . . . 150
BIBLIOGRAPHY . . . .153
APPENDIX . . . .182
Appendix A Static Microstructure . . . 183
A.1 Abstract . . . 183
A.2 Results . . . 184
LIST OF TABLES
LIST OF FIGURES
Figure 1.1 Overview of Apparatus . . . 7
Figure 1.2 DLVO Parameters . . . 21
Figure 1.3 Triton X-100 . . . 23
Figure 1.4 Interparticle Potential . . . 27
Figure 1.5 Hard Sphere Colloid Phase Diagram . . . 29
Figure 1.6 Hard-DiskPφDiagram . . . 33
Figure 1.7 RCP Ill Defined . . . 34
Figure 1.8 HS Structures Between Plates . . . 37
Figure 1.9 HS Phase Diagram Between Plates . . . 38
Figure 1.10 Polydispersity Phase Diagram . . . 40
Figure 2.1 Mask Layout . . . 43
Figure 2.2 Wafer Layout . . . 44
Figure 2.3 Wafer Processing . . . 45
Figure 2.4 Sandblasting . . . 48
Figure 2.5 FOTS . . . 50
Figure 2.6 Dewetting at Inlet due to Silanization . . . 50
Figure 2.7 Inlet Silanization Photolithography . . . 51
Figure 2.8 PDMS Coverglass . . . 53
Figure 2.9 Bonded Device . . . 54
Figure 2.10 Device Holder . . . 56
Figure 2.11 Wetting Characterization . . . 56
Figure 2.12 Profilometry of Silicon Microchannel . . . 57
Figure 2.13 Microsphere Size from DLS . . . 58
Figure 2.14 Microsphere Zeta Potential . . . 60
Figure 2.15 Density Matching Test . . . 61
Figure 2.16 Segregated Deposition . . . 63
Figure 2.17 Density Matching Effect on Segregated Deposition . . . 64
Figure 2.18 Pixel Size Calibration . . . 69
Figure 2.19 Barrier Size Characterization . . . 71
Figure 2.20 Velocity Profile Near Wall . . . 76
Figure 2.21 Streamlines Schematic . . . 78
Figure 2.22 Definition of Excluded Zone . . . 79
Figure 2.23 Simulated Fluid Flow Around Heap . . . 82
Figure 3.1 Microchip Geometry . . . 87
Figure 3.2 Density Fluctuations . . . 90
Figure 3.3 Time-Series of Heap Properties . . . 92
Figure 3.4 Steady-State Angle of Repose . . . 94
Figure 3.5 Staircase Experiment Time-Series . . . 95
Figure 4.1 Overview of Deformation Experiment . . . 101
Figure 4.3 Stress-Strain Measurement Protocol . . . 106
Figure 4.4 Raw Stress-Strain Measurements . . . 107
Figure 4.5 Scaled Stress-strain Measurements . . . 108
Figure 5.1 Bidisperse Disordered Heap . . . 118
Figure 5.2 Particle Tracking Image Analysis Steps . . . 121
Figure 5.3 Particle Radius Identification . . . 122
Figure 5.4 Image Correlation Estimate of Affine Deformation Field . . . 126
Figure 5.5 Affine Field from Particle Tracks . . . 128
Figure 5.6 Full Deformations and Non-Affine Deformations . . . 129
Figure 5.7 Heap Center Before and After Compression . . . 131
Figure 5.8 Velocity of Compressed Front . . . 132
Figure 5.9 Particle Tracks and Packing Fraction . . . 135
Figure 5.10 Particle Trackingvs.PIV . . . 136
Figure 5.11 Affine Deformation Time-Series Analysis During Decompression . . . 138
Figure 5.12 Affine Deformation Time-Series Analysis During Compression . . . 139
Figure 5.13 Compression versus Decompression Dependence ofDmin2 (y,t). . . 140
Figure 5.14 Scaling ofDmin2 versus y and t . . . 142
Figure 5.15 Schematic of Compression . . . 146
Figure A.1 Radial Distribution Function forH=1.32d. . . 185
Figure A.2 Radial Distribution Function for Crystal inH=1.26d . . . 187
Figure A.3 Monodisperse Crystals . . . 190
Figure A.4 Schematic of Configurations forH =1.32d . . . 192
CHAPTER
1
INTRODUCTION AND BACKGROUND
The study of the collective properties of many-body interacting matter continues[Col03]to be a “new physics” frontier, complementary to cosmology and particle physics, yet beautiful and
fundamental[And72; Gu09]unto itself. Remarkably, condensed matter systems with many internal
degrees of freedom have various phenomenological characteristics in common. Many systems have been formally classified into a small set of universality classes. However, in systems with
strong dissipation and non-ergodicity, we encounter great difficulties identifying the relevant order
parameters or even identifying all the relevant degrees of freedom. As long as these difficulties remain, the identification of universality classes in nonequilibrium systems will remain a major
unsolved problem. One approach to tackle these issues is to study a classically interacting system,
where tracking all the positions, velocities, orientations, and interparticle forces would in principle provide a full description of the internal degrees of freedom or hidden memory elements of the
material. While this complete description is possible in principle, it has yet to be realized in practice.
In this thesis, we study a soft condensed matter system out of equilibrium due to external driving, viscous dissipation, and the geometric inaccessibility of configuration transitions, all of which lead
to a breakdown of ergodicity. Single particles in our experimental system can be treated as a rigid body, so that the internal degrees of freedom of the single particle can be ignored. Except for van
1.1. WHAT IS SOFT MATTER? CHAPTER 1. INTRODUCTION AND BACKGROUND
nature of the emergent rigidity of many-body systems by studying real-space positional degrees of freedom at discrete times.
Many-body quantum systems are considered by some to be more interesting than classical
systems due to their unusual properties (e.g. superconductivity, superfluidity). However, far more information is experimentally accessible in many-body classical systems, allowing for much richer
tests of much of the same underlying physics. In fact, detailed isomorphisms[Cha81]between
quan-tum many-body systems and classical many-body systems can be constructed. For example, Gennes [Gen72]constructed a correspondence between a Landau-Ginzburg superconductor and a smectic A liquid crystal. Protein conformations[Fra91; Ste85]have been studied using spin-glass[Ste04]
Hamiltonians. More relevant to this thesis, the classical statistical mechanics of point particles interacting via two-body Yukawa forces is isomorphic[Fro76]to a massive Thirring model[Thi58]
quantum field theory, itself isomorphic[Del98; Col75]to a Sine- Gordon model, which has soliton
solutions. Rather than simple speculative analogies, these constructions are meant to be a powerful framework to arrive at quantitative solutions of condensed matter systems, depending on which
one is easier to study, the quantum mechanical or the classical case. In our case, experiments on
the classical system are easier.
1.1
What is Soft Matter?
In this thesis, we study phase transitions in a type of soft matter: Brownian hard sphere suspensions. Soft condensed matter physics, the study of soft matter, is a subfield that has emerged on the
premise that gaining a more general understanding of disordered many-body systems could enable
large-scale engineering of complex nanostructures, sensors, and synthetic biological systems with broad societal impact. The classic studies that sparked interest in the field are studies of the glass
transition, polymer physics, and liquid crystals[Lar98; JW03; CL00]. There is no well-established
definition of soft matter, but there has been little disagreement for the past fifty years about the following two aspects of soft matter. First, the relevant length-scales are neither atomic (0.1-1nm)
nor macroscopic (≥1mm), and are sometimes referred to as a mesoscopic length-scale [Lar98; PA06].
Second, the response to external forces (rheological response) of soft matter differs from liquids and solids. This rheological indeterminacy characteristic of soft matter is clearly expressed in one of
the classic texts on rheology. “Deformation, Strain and Flow,” published on 1949 by Markus Reiner, says, “strictly defined rheological divisions belong to ideal abstract bodies and not to real materials.
If we say that stone is a liquid, every builder will laugh at us and the structural engineer will dismiss
1.1. WHAT IS SOFT MATTER? CHAPTER 1. INTRODUCTION AND BACKGROUND
elastic, a property absent in a Newtonian liquid” (p. 158)[Rei49].
While there has long been general agreement that soft matter should be studied by condensed
matter physicists, there has been broad disagreement as to what to call the field, partially because it
continues to expand its reach year after year[JW03]. Even today, the name “soft condensed matter” is not yet universally accepted. In his 1991 lecture after being awarded a Nobel Prize in Physics,
“for discovering that methods developed for studying order phenomena in simple systems can be
generalized to more complex forms of matter, in particular to liquid crystals and polymers,” de Gennes[De 92]points out that “Americans prefer to call it[soft matter]complex fluids.” In Web of
Science, the topic “complex fluids” returns more than 40,000 items, versus fewer than 6,000 items
for “soft matter.” We can also compare two classic texts in the field that use different terms: “The structure and rheology of complex fluids,” which prefers “complex fluids,” was published in 1999 by
Ronald Larson, and has 2531 citations (195 citations/year), which is more citations per year than the 2642 citations (155 citations/year) of “Principles of Condensed Matter Physics”, which prefers “soft matter”, and was published in 1995 by Paul Chaikin and Tom Lubensky. Wilson Poon bypasses the
name question and simply declares, “Soft condensed matter physics is concerned with the study of
complex fluids”[PA06]. It would not be surprising if the field takes on a different name years from now, but it is clear that the scientific goal to extend our understanding of condensed matter beyond
crystalline solids will remain central.
Part of the urge to pursue this field comes from observing most real materials fall under this
category. The slow relaxation times and the bulk solid-like responses of soft matter can be observed in
materials of such mundane character as toothpaste, mayonnaise, and shaving cream. In fact, modern microscopy and fabrication techniques have allowed us to realize that the majority of apparently
homogeneous, rigid materials have disordered rather than crystallized structures. A non-exhaustive
list of examples of such soft materials includes colloidal suspensions, glasses, emulsions, foams, granular materials, pastes, liquid crystals, polymer gels, protein suspensions, and cells[Che10a].
These soft materials have captured academic and industrial interest of a highly interdisciplinary
character. For a historical evolution of soft condensed matter physics and a survey of its central themes, see [Wit99; Cat04; Noz12].
According to [JW03], Chaikin and Lubesky’s 1995 textbook was the first to attempt to
com-prehensively cover the subject. Perhaps for that reason, it is one of the few that tackles head-on the apparent paradox of how soft condensed matter can test concepts from traditional or “hard”
condensed matter, despite the fact that often soft matter interparticle interactions are classical
rather than quantum mechanical. Chaikin and Lubensky argue that condensed matter physics deals in general with understanding the macroscopic properties of interacting many-body
1.1. WHAT IS SOFT MATTER? CHAPTER 1. INTRODUCTION AND BACKGROUND
fundamental interactions between the constituents. Hard condensed matter physics studies the quantum properties of solids made up of atoms and molecules. Conversely, “soft” condensed matter
physics concerns the study of solids where the constituents can be described to interact classically
such that “ħh =0”[CL00]. While not all soft condensed matter systems interact classically at the microscopic level (e.g., liquid crystals), Chaikin and Lubensky argue that nothing fundamental is
lost in the study of many soft condensed matter systems such as granular materials, emulsions,
foams, non-Brownian suspensions, where the interactions can in fact be written classically. The following paragraph is a summarized presentation of their argument.
In general, the study of soft matter allows unique tests and extensions of the unifying concepts
of condensed matter physics, which is desirable because these unifying concepts have had broad impact in other areas of physics such as particle physics and cosmology. One such concept that is
not lost, arguably the most powerful unifying idea from the study of condensed matter, is that
macro-scopic properties are governed by conservation laws and broken symmetries. The key reason is that conservation laws and broken symmetries are equally important in classical and quantum systems.
Thus, the physical consequences of the underlying conservation laws and broken symmetries to
the macroscopic properties are largely independent of whether the underlying particle dynamics are classical or quantum mechanical, as long as one uses the appropriate language to express the
interactions and the appropriate averaging process to connect to the macroscopic properties. The point is that studying classical rather than quantum systems does not prevent one from learning
general truths about phases of matter and their transitions. Crucially, by focusing on materials other
than crystalline solids, soft condensed matter physics accesses a broader set of critical phenomena and macroscopic properties. This rich, novel set of phase transitions can be readily accessed
ex-perimentally using setups that are comparatively simpler than the vacuum chambers needed to
make plasmas or low temperatures needed to make Bose Einstein condensates. One of the main justifications for studying these new types of phase transitions is that by understanding the nature
of the phase transitions, we may expand the set of condensed matter physics concepts that we
consider fundamental[CL00].
Researchers have long realized the importance, relevance, and advantages of studying soft
matter, but the field has not been subject to intense study until this century, likely due to its high
complexity. This high complexity has become amenable to study due to technological advances and due to the theoretical successes of condensed matter systems in crystalline systems.Novel issues
tackled in the study of soft condensed matter typically include disordered structures, fluctuation
spectra with long tails, and complex structural dynamics. Much of these non-trivial properties of disordered matter emerge from collective phenomena coupling multiple length-scales and
1.2. MOTIVATING QUESTIONS CHAPTER 1. INTRODUCTION AND BACKGROUND
has been a central question that has unified the eclectic and interdisciplinary approaches to study soft matter[DD01]. The systematic application of conservation laws and identification of broken
symmetries has had a broad impact across physics. Similarly, a fundamental understanding of how
global properties emerge in systems composed of subunits collectively interacting via simple rules and collective effects could also have a broad impact across physics. For example, it could advance
our understanding of the intricate connection[Bah10]between structure and function in biological
nano- machines.
1.2
Motivating Questions
One of the central themes in the study of soft condensed matter revolves around understanding the nature of the rigidity transition at these intermediate scales. There are many methods and concepts
used to study soft matter, but the foundational studies upon which to build further studies can be
grouped into three conceptual lines of inquiry. First, (i) how does the criterion of rigidity vary as a function of temperature, density and applied stress? Second, (ii) how is the long-range order or
disorder of the microstructure reflected in both translational and orientational order parameters?
Third, (iii) are there features in the dynamics of the structure that reveal details about the nature of the transition? These three lines of inquiry are the ones that we follow in this thesis. Chapter 3 is
devoted to the first question by studying an indirect measure of rigidity as a function of applied stress.
Chapter 4 is also devoted to the first question by studying a direct measure of rigidity as a function of applied stress. In Chapter 4, we also tackle the second question by studying the microstructure
directly. In Chapter 5, we study the last question by studying nonlinear behavior in the local structural
dynamics. There are further possible conceptual lines of inquiry possible that would build upon these studies by testing the existing understanding: for example, detection and prediction of heap
failures such as cracks and avalanches, increasing the complexity of the single-particle by changing
one of its static properties such as shape, dielectric polarizability, or magnetic moment, or the simultaneous formation and interactions between multiple microsphere heaps.
We study the questions (i-iii) in a Brownian system with nearly-hard sphere interparticle
poten-tial, under carefully controlled conditions. The aim of these questions is to probe the way the system explores phase space to understand the origin of the non-ergodic nature (the particles cease to
explore phase space uniformly) of the behavior at the level of the microstructure. A detailed under-standing of the origin of non-ergodicity is lacking, but it is known to exist in systems with dissipation,
confinement, and external driving. In this thesis, our Brownian suspension is non-ergodic due to all
1.3. PREVIEW OF RESEARCH CHAPTER 1. INTRODUCTION AND BACKGROUND
applied pressure from a compressed air regulator. Information about this phase space exploration can be obtained by directly tracking the microstructural rearrangements in real space[BM97], by
making global measurements of the bulk[CW77]and shear modulus[Wil02], or by understanding
the quasi-localization of the vibrational eigenmodes and the deviations from crystallinity apparent in the vibrational density of states[Wya05; O’H03; Che10b].
1.3
Preview of Research
We seek a basic understanding of the physical properties of a wide class of soft materials including
cells, proteins, emulsions (e.g. mayonnaise), and colloidal suspensions (e.g. inks). These
technolog-ically important materials share a capacity of exhibiting both solid-like and liquid-like behavior. Despite a long history of prior studies, we lack a fundamental understanding to predict even basic
aspects of their behavior under external driving.
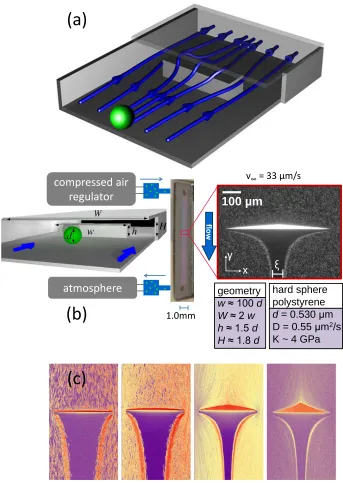
We perform experiments on hard sphere Brownian suspensions of submicron particles, an idealized soft matter system that lacks rigidity in the absence of external driving, see Fig. 1.1. A basic
description of our apparatus is as follows. A dilute suspension of hard spheres is pumped into a
shallow microchannel that confines the particle phase space to quasi-2D motion (see Fig. 1.1a). All our experiments use submicron particle sizes, and a large portion are focused on 530 nm particles.
For this size, single particles have a diffusion constant of 0.55µm2/s, and the single particle elastic modulus is∼4 GPa. We use a compressed air regulator to pump the suspension (see Fig. 1.1b), which allows for fine pressure control because it uses a piezoelectric crystal as its actuating element.
Example heaps of Brownian microspheres under flow are shown in Fig. 1.1c.
The overarching question driving my dissertation is "What is the nature of the rigidity of these heaps?" Does the rigidity of the heaps follow from static mechanical stability driven by a sufficiently
interconnected network of particle contacts? Or, does the rigidity of the heaps follow from a kinetic
glass transition characterized by a diverging resistance to flow such that the time necessary to observe rearrangements grows prohibitively large? We cannot address these questions in the most
general sense, but we address limited forms of these questions. In the remainder of Chapter 1, we
introduce relevant theories of rigidity, we describe how to experimentally tune colloidal systems to a hard sphere regime, and we review the phase diagram of hard spheres and hard disks. In Chapter
2, we describe the most relevant details of our experimental, analytical and computational methods. These methods have allowed us to overcome the limitations of previous experimental approaches.
Namely, the rigidity of our heaps does not emerge from the effects of gravity, inertia, static friction,
1.3. PREVIEW OF RESEARCH CHAPTER 1. INTRODUCTION AND BACKGROUND
geometry
w≈ 100 d
W≈ 2 w
h≈ 1.5 d H≈ 1.8 d
(a)
100 µm
y
x
ξ
(b)
(a)
flow
v∞ = 33 μm/s
1.0mm
compressed air
regulator
atmosphere
hard sphere polystyrened = 0.530 μm D = 0.55 μm2/s
K ~ 4 GPa
(b)
(c)
Figure 1.1Overview of Apparatus
1.4. THEORIES OF RIGIDITY CHAPTER 1. INTRODUCTION AND BACKGROUND
conditions imply that the onset of rigidity involves many-body collective interactions. In Chapter 3, we study the steady-state size, angle of repose, and internal fluctuations of the heap versus the
im-posed flow conditions. In Chapter 4, we measure the response of the heap to external perturbations,
allowing us to quantify their elastic modulus. In Chapter 5, we study the microstructure of the heap and track the local particle displacements during deformations, allowing us to separate the affine
and non-affine components of the deformation. We expect that insights resulting from this thesis
into the mechanism of rigidity of our system are applicable to a wide class of soft matter systems.
1.4
Theories of Rigidity
There appear to be two generic, distinct mechanisms by which disordered, rigid matter emerges. One is aglass transitionof atomic-scale objects as a function of temperature, density, and pressure, where
a rigid phase emerges as a metastable state characterized by dynamics with extremely long
time-scales relative to human experimental time-time-scales (e.g., plastics, melt-glass). Another is amechanical transitionto static stability of macroscale objects as a function of shear stress, pressure, and geometry
of interactions (e.g., bridges, sandpiles). The relevance of collective effects to our understanding of
these two generic transition mechanisms of soft-matter is demonstrated by studying the simplest case, the hard sphere interparticle potential. With a hard potential, the existence of a rigid, disordered
phase is not driven by a free-energy difference, unlike crystal nucleation. Both experiments and
simulations of hard spheres find rich dynamics and bulk responses characteristic of glassy states and mechanically stable states, allowing the hard sphere system to become the ideal generic system
for studying the physics of the glass transition and the mechanical stability transition.
These two generic paths to rigidity provide complimentary pictures for how to relate the mi-crostructure to the macroscopic dynamics and it has even been proposed that they might be
expressions of the same underlying transition–the jamming transition. Here, as used by Liu and
Nagel[LN10], van Hecke[Hec10], and O’Hern[O’H03], “jamming” refers to the generalized rigidity transition, be it glassy or mechanical. It is of historical value that the first instance of the term
“jamming” in the literature in relation to the glass transition comes from Gibbs[Gor76], who refers
to the glassy state as “the nonequilibrium, jammed state.” The mechanical transition as we have dis-cussed it refers to the athermal rigidity transition versus density and applied stress. The zero-stress
limit of the critical point of the mechanical transition is known as Point J, a point that has been well-studied due to its theoretical and numerical accessibility and the generality of arguments made
about it. While the unified “jamming" proposal has gained traction, we take the neutral position of
1.4. THEORIES OF RIGIDITY CHAPTER 1. INTRODUCTION AND BACKGROUND
reasonable, just like as one studies electricity and magnetism it becomes clear that their relationship is so intertwined that pursuing a unified treatment is warranted. Nevertheless, theoretical[Mar09]
and experimental[Lec08]objections to unifying the transition do exist. Indeed, while increasing the
packing fraction, the fraction of volume occupied by spheres relative to the total volume available to the structure, in vibrated granular system[Cou13], two distinct transitions are observed. One is a
structural transition occurring atφSrelated to the number of interparticle contacts, and the other is a dynamical transition occurring atφDrelated to the number of rearranging particles. However, as the vibrational excitations driving the granular material are reduced,φSandφDconverge to a single value that may be the generalized Point J[Cou13].
1.4.1 Glass Transition
Temperature, density, and pressure are control variables of the glass transition of thermal hard
sphere systems. It has been known for millennia[MM04]that glass can be formed by fast cooling of
a liquid. Alexandrov showed experimentally that the glass transition temperature of a polymer, TG, is controlled by the number density of the molecular constituents, independent of the molecular
weight and degree of polymerization of the polymer[AL44]Gibbs & DiMarzio[GD58]. Alexandrov’s
results provided early experimental evidence for using free volume as a central concept in the glass transition. More modern treatments indicate that the polymer’s molecular weight has an effect on
the glass transition temperature, but retain the importance of the free volume, as summarized by the empirical Flory-Fox equation[FF50]:
TG=TG,∞− VF
M (1.1)
whereVFis an empirical measure of free volume andMis the molecular weight of the polymer. Gibbs & DiMarzio[GD58]established theoretically that the density dependence should be understood in
terms of the free volume in the system. Understanding that free volume is an important physical
variable controlling the transition, Gibbs realized that deeper insights could be obtained by studying hard sphere systems where the dynamics are dictated primarily by free-volume. In hard sphere
simulations, Gibbs et al.[Gor76]demonstrated glassy dynamics under a slow compression in the limit
of finite but arbitrarily smallT/P. A non-trivial insight in terms of how these variables are related in the hard sphere case has been achieved by showing that temperature and pressure equally affect the
rate of slowing down the dynamics. Nagel et al.[Xu09]showed that the dimensionless relaxation time τ/p
1.4. THEORIES OF RIGIDITY CHAPTER 1. INTRODUCTION AND BACKGROUND
type of hard potential used: harmonic, Hertzian, Weeks-Chandler-Andersen, or true hard-sphere potential, which gives the result broad applicability to our real colloidal hard sphere system.
Despite many advances in our understanding of the glass transition reviewed by Hunter &
Weeks[HW12], our understanding of the glass transition is far from complete. Current[Mar11] theoretical approaches remain at odds about the molecular processes by which liquids acquire
amorphous rigidity upon cooling. Also, aside from temperature, density and pressure, there may
be other relevant control variables. For example, classical descriptions of glassy systems using T,ρ, and P achieve quantitative accuracy in certain systems, particularly colloidal glasses, but
molecular, electronic, and magnetic system can form glassy states where quantum mechanical
effects significantly inhibit or enhance glassy dynamics[Mar11].
External stress (shear and pressure) and density are the control variables of the mechanical
transition of athermal hard sphere systems. Information about this transition can be obtained by the
glass transition of thermal hard spheres if one drives the thermal system to the limitT/P →0[Xu09]. The terminology is that at this limit one arrives at the zero temperature jamming transition of
frictionless spheres with finite ranged repulsions[Xu09]. As an example of this limit, da Cruz et
al.[Cru05]simulate hard spheres at zero temperature and show that mechanical stability depends on ratio of shear stress to normal stress. Their simulations are relevant because they reproduce
experimental observations dating back to Dantu[Dan57]of heterogeneous force distributions along chain-like paths, also known as force chains. In addition, they observe quasi-static phases with a
macroscopic angle of friction of≈6.6◦despite having put in frictionless interparticle interactions.
1.4.2 Maxwell’s Rigidity Criterion
Maxwell[Max64]provided a microscopic explanation where a sufficiently large number of contacts leads to mechanical stability, leading to the modern understanding that friction is not necessary to
form rigid packs. Here, pack refers to a generic assembly of particles without regard for the specific
geometry. Microsphere heaps are a type of thermal pack of spherical particles with a specific bulk geometry. The seminal studies of this rigidity criterion were made in granular materials, which are
athermal packs of frictionally interacting particles[Meh07]. One measure of mechanical stability
in granular systems is their angle of repose, which is the angle that a sandpile makes with the horizontal[Meh07]. Euler[Eul65]was the first to write a condition relating the angle of repose,θ, to µ, the coefficient of static friction. But heaps of frictionless particles are not solid blocks and their macroscopic angle of repose would imply static friction coefficients that are nearly zero, much less
than the bulk static friction coefficient of the polymer that makes up the particles (polystyrene).
1.4. THEORIES OF RIGIDITY CHAPTER 1. INTRODUCTION AND BACKGROUND
repose just due to the interlocking of grains into a stable structure. Coulomb’s insight was formalized by Maxwell in the argument that follows.
By counting the number of constraints relative to the number of degrees of freedom, Maxwell
showed[Max64]that rigidity emerges at a sharply defined (isostatic) value of the average number of contacts per particle, ziso. GivenN particles ind dimensions, there areN d Newton’s equations of motion or degrees of freedom. Givenz average contacts per particle, there areN z/2 constraints (because a contact shared by two particles isoneconstraint). Rigidity develops if the number of constraints is greater than or equal to the number of equations, meaning ifN z/2≥N d⇒z≥2d. This inequality is Maxwell’s original criterion. Isostaticity, a sharply defined onset of rigidity, develops
because the particles considered are hard spheres, so there is a second inequality to satisfy the non-deformation of particle surfaces. For each particle, hard surfaces mean there cannot be more
than two contacts per degree of freedom; symbolically,z/d≤2. Together, these two inequalities imply that ziso=2d. Note that torques are not considered because we are considering frictionless spherical particles, such that contact forces do not apply a torque and spheres are free to rotate
without disrupting the rigidity of the structure.
One way to inspect whether the previous discussion of isostatic frictionless spheres is relevant to our experimental system of colloidal hard spheres is to consider a dimensionless number that weighs
the importance of particle deformations. Moukazel showed[Mou98; Mou02]that contact networks in packs of slightly polydisperse particlesmustbe isostatic when the particle stiffness is large. One
way to quantify this is by using a dimensionless number that measures the ratio of the elastic stress
necessary to deform particles up to strains on the order of the size variation between particles to the total stress supplied by the applied force. Such a dimensionless number is the isostaticity parameter
I =kδR/fL, which measures if packs are isostatic if the number is much greater than one, wherek is the single particle spring constant,δR is the polydispersity, andfLis the load force. One way to compute the isostaticity parameter starting from dimensional units is to measurek in units of the material’s bulk modulus, which directs one to measureδRas a strain-like quantity in dimensionless units of the size variation between particles relative to the mean particle size, and to measure the applied load force in pressure-like units of force/area. For us, the material’s bulk modulus is on
the order of a few GPa, the polydispersity measured as the width of the particle size distribution
divided by its mean is no greater than six percent, and the applied stress on the entire structure is on the order of 100 Pa, such that no single particle feels a force that exceeds that stress. Putting these
together, we get a lower bound on our isostatic number, which is well in the isostatic limit (I >>1):
I ≈(1 GPa) 0.06
100 Pa
1.4. THEORIES OF RIGIDITY CHAPTER 1. INTRODUCTION AND BACKGROUND
Isostatic rigid states are not the only rigid states possible. Rigid hypostatic packs withz <ziso can be readily accessed with frictional particles, and hyperstatic packs withz>zisocan be readily accessed with soft particles. The degree to which frictional particles and ellipsoidal particles affect
the transition is reviewed by van Hecke[Hec10], but notably the existence of a specific minimum contact number remains, although the ability to predict that contact number by counting arguments
is less exact. For hyperstatic packs, simulations find a square root scaling of excess contact number
versus excess packing fraction that is independent of dimension[O’H03].
The rigidity of a solid-like pack is strongly influenced by the existence of boundaries. Here,
pack refers to a generic assembly of particles without regard for the specific geometry. In
partic-ular, because our microsphere heaps are an experimental system, they must be finite-sized and consequently must have an edge. The existence of this edge has repercussions because particles
along the edge are more prone to rearrangement due to having fewer neighbors than particles in
the interior. The interior must therefore have more average constraints per particle than an infinite system to achieve isostatic mechanical stability[Wya05]. This “cutting argument” by [Wya05]allows
one to define a lengthscale`∗below which the pack behaves as an isostatic solid and above which it
behaves as an elastic solid. The lengthscale`∗is related to the number of extra contacts∆z in the heap’s interior by[Wya05]:
`∗∝ 1
∆z (1.2)
Applying the argument to our heap geometry leads to an estimate that`∗∝1/sinθ. It also leads
directly to two questions: what determines the elastic properties of the solid above`∗? And, what determines the local value of the number of contacts and of`∗? Due to the combination of thermal
energy, short-range lubrication forces, and steric effects due to a surfactant coating on the particles,
the surfaces of particles do not normally touch and the average number of contactsz per particle in the interior of the heap does not carry the same meaning as in macroscopic systems. Instead, here
z refers to the average number of interacting neighbors per particle, such that these interactions are valid time-averaged mechanical constraints. The lengthscale`∗and the number of extra contacts can be spatially heterogeneous, given that they satisfy the following local criterion for rigidity[BW06;
Wya05]:
∆z≥C1p
p (1.3)
1.4. THEORIES OF RIGIDITY CHAPTER 1. INTRODUCTION AND BACKGROUND
as you increase the distance from the barrier. This hypothesis of a depth-dependent importance of cooperative motions motivates our studies of the local deformations in the heap at different
y-positions, which we pursue in Chapter 5.
1.4.3 Critique of Mode Coupling Theory
An old adage[Cha]states that the number of theories of the glass transition exceeds the number of glass transition theorists. Interested readers may refer to the following reviews of seminal
thermody-namic theories[Gor76], seminal hydrodynamic, spin, and tiling theories[Fre88]and more recent mean-field, kinetically constrained, and out-of-equilibrium theories[BB11].
Mode-coupling theory is arguably the most successful theory of the glass transition[LN01; ST05].
We will not use mode-coupling theory to analyze our experiments, but as the most successful attempt at a microscopic theory of kinetic arrest of hard spheres, it merits attention here. Kob
& Schilling[KS91]review the basic results of MCT including its approximations and errors that
indicated MCT might not be a mean field theory after all. For a detailed derivation of MCT, see Reichman & Charbonneau[RC05]. MCT is derived by finding the Liouville equation of motion of the
dynamical structure factor by using the projection operator technique, then finding an ergodic to
non-ergodic transition. There are few ways to make adjustments to the theory and there are no fitting parameters; however, extensions to the theory are often introduced to improve agreement with
experiments by introducingad hoccouplings to currents (kinetic energy terms)[RC05]. Brownian
hard sphere systems, such as the one of interest in this thesis, are particularly challenging for MCTs because the currents that are typically introduced simply do not exist[Sza03; RC05]. Thus, there is
no path to make progress beyond simple MCT, which underestimates[Sza03]the critical packing
fraction for rigidity by 10% in 3D. This underestimating is a serious failure because it amounts to predicting kinetic arrest to a non-ergodic phase at conditions where the system is still[RC05]ergodic
and liquid.
The most striking success of MCT is the experimental verification[EB02; Pha02; Bar02]of its non-trivial prediction of a re-entrant glass/gel/glass transition in hard sphere systems with a short-range
attractive potential.
The original MCT has been formally recast as a mean-field theory: random first order transition theory[LW07]. While this development has greatly increased its range of applicability, it has also
allowed us to understand more clearly its limitations. The mean-field approach is to reduce a many-body problem to an effective one-many-body problem by replacing a fluctuating local order parameter
with a spatially uniform coarse-grained order parameter[CL00]. To obtain sensible results from
1.5. HARD SPHERE COLLOIDS CHAPTER 1. INTRODUCTION AND BACKGROUND
compared with the value of the order parameter itself. The physical intuition is that MFTs become more accurate in a many-body system in which each body is significantly coupled with many others.
Increasing dimensions allows more neighbors to interact, such that in the limit of infinitely large
dimensions, MFTs should become exact.
For any given MFT, there is an upper critical dimension above which it gives sensible results,
and below which it is grossly inaccurate. For instance, the mean field Ising models with nearest
neighbor interactions and a fixed external field predicts a finite temperature phase transition in 1D, but Ising showed analytically[Isi25]that there is none. The Ginzburg criterion[Gin60; Ami74]is
the seminal method of finding these upper critical dimensions. Landau mean field theory for the
Ising model has an upper critical dimension of 4. Also, the Random Field Ising Model with nearest-neighbor interaction spontaneously magnetizes[LP13]for dimensions greater than or equal to 3D,
by following the Imry-Ma argument[IM75]. Following this classic approach, Biroli & Bouchaud [BB04]showed that MCT has an upper critical dimension of 6, using the Ginzburg criterion.
However, MCT has failed a number of recent numerical simulations[BT10; IM10; SS10; Cha11],
casting doubt on whether an upper critical dimension exists for MCT at all, since inconsistencies
appear for dimensions greater than 4 and the errors gets worse with increasing dimension. These results suggest that the successes of MCT when compared with experiments are either a coincidence
at low dimensions or an artifact of the custom coupling schemes created for specific systems. Nevertheless, MCT makes predictions of the bulk response for 2D disordered packs that agree
qualitatively well with simulations[WH11]. While there is reasonable qualitative agreement between
experimental rheometer stress-strain curves and MCT flowing glass predictions[Ama13], the de-viations emphasize the importance of experimentally-observed features that are not modeled by
MCT: the contribution from local rearrangements to slow structural relaxation and the ability of
slow structural relaxations to melt to solid state[Ama13]. Because MCT tests have been made mostly with simulations and because MCT agrees better with weakly coupled supercooled liquids than
Brownian hard spheres deep in the glassy phase, it isinterestingto pursue experimental studies well
into the rigid regime as we do in this thesis, not for the purpose of testing MCT, but for the purpose of providing the basis for the next generation of theories.
1.5
Hard Sphere Colloids
Colloidal systems are dispersions of a type of phase of matter into another. The careful study of
colloidal systems has yielded profound insights. Einstein was inspired to estimate of the size of the
1.5. HARD SPHERE COLLOIDS CHAPTER 1. INTRODUCTION AND BACKGROUND
experimental determination of Avogadro’s number, and earning Einstein the 1926 Nobel Prize in Physics. Casimir’s original calculation[Cas48; CP48]of the Casimir effect was inspired by an
observation of a discrepancy[VO48]between the scaling of the attractive potential in colloidal
systems and the scaling of Hamaker’s non-retarded calculations of the van der Waals (vdW) force. It was also with “colloidal suspensions of hard particles under shear” in mind that Cates et al.[Cat98]
wrote the paper that, together with its commentary [LN98], arguably catalyzed the recent interest
in the jamming transition[LN10; Hec10].
Particles dispersed in a fluid are affected by multiple interparticle interactions: long-range
elec-trostatic and hydrodynamic forces, short-range van der Waals and surface forces, Brownian motion,
and excluded volume entropic forces. The interactions can be tuned by the appropriate choice of particle and fluid properties. Even the excluded volume can be tuned by using thermoresponsive
materials, such as PNIPAM microgel particles[Men12; Nor10; Zha09; Han08; Han08; Men12; Sol97; SR99; Mat09; Sno96; Kra00; Rom10], that swell and shrink in response to temperature changes.
Below we review the literature on how to tune a colloidal suspension to yield a nearly hard sphere
interaction. We begin with an introduction to colloids (Sec. 1.5.1). We review the single-particle
behavior in Sec. 1.5.2 prior to reviewing the particle-particle interactions. Out of the many single particle effects that we could address, we choose Brownian motion (Sec. 1.5.2.1) and sedimentation
(Sec. 1.5.2.2) due to their high importance. We then review passive methods for tuning the strength of interparticle interactions (Sec. 1.5.3) by modifying the dispersing fluid. These passive methods
must be informed by an understanding of the theory of van der Waals interaction (Sec. 1.5.3.1)
and the DLVO theory (Sec. 1.5.3.2). In Sec. 1.5.4, we point out that although the DLVO theory has been successful, it does not describe well the bulk modulus of suspensions. Last, we write down
an explicit argument for the specific form of the interaction potential for our experimental system,
which has some softness (Sec. 1.5.6).
1.5.1 Introduction to Colloids
Most general modern usage refers to colloids as a dispersion of one phase into another, without
regard for whether the phases are gas, liquid, or solid, so foams, aerosols, emulsions, gels,
suspen-sions are all types of colloidal dispersuspen-sions. The first usage of the termcolloids(from Gk. kolla “glue” +-oeides “form”) and the most widely-cited “start” of the field is the 1861 paper “Liquid Diffusion Applied to Analysis” by Thomas Graham[Gra61], who classified substances into crystalloids (sugar, salt, able to crystallize, able to diffuse through membrane) and colloids (not able to crystallize or
diffuse through membrane)[Rus92].
1.5. HARD SPHERE COLLOIDS CHAPTER 1. INTRODUCTION AND BACKGROUND
are rules of thumb, not precise values. Particulate dispersions of polymeric microspheres are most frequently classified by size. Large particles, greater than 100µm, referred to as granular or
non-Brownian suspensions, which typically have a nearly-hard sphere interparticle potential. These
granular suspensions have primarily been used to study the rheological effects of the interstitial fluid on the properties of dry granular materials composed of the solid phase. Small particles, up to 1µm,
referred to as colloidal suspensions, typically have a soft potential and their behavior is strongly
influenced by Brownian motion. Because colloidal suspensions typically have a Leonnard-Jones interparticle potential, they allow the colloidal particle to be treated as a model atom[Poo04]and
the ability to model processes that are difficult to observe otherwise at the atomic scale, such as
crystallization[Sur06]and melting.
We study suspensions with particles of intermediate size, with diameters at the boundary
be-tween granular and colloidal suspensions, bebe-tween 0.5 and 1.0µm, with both the nearly hard sphere
potential and Brownian motion being important. Brownian suspensions are used to denote particle of size in the intermediate regime, to distinguish from the small and large particle suspensions. Here,
the nearly-hard sphere potential allows us to model the particle as a “grain,” yet the importance
of Brownian motion and various other features clearly puts the system in a class separate from granular matter. This is a good thing! It is precisely this distinction that makes both glass transition
arguments and mechanical stability arguments relevant. The following energy scales reflect the nearly-hard sphere character and the low importance of inertia, signaling a high importance of
geometric concepts and entropic concepts to determine the stability of a rigid phase:
repulsive force/Brownian force≈108 (1.4) repulsive force/viscous drag force≈105 (1.5) inertial force/viscous drag force≈10−12 (1.6)
1.5.2 Single particle in a fluid 1.5.2.1 Brownian Motion
In the absence of external driving, small particles in a fluid move randomly, a phenomenon known
as Brownian motion. The literature on Brownian motion is old and extensive, starting with the
discovery of Brownian motion by Robert Brown[Bro28]. The history of the subject and various well-established results are reviewed in Russel[Rus81]and Hänggi & Marchesoni[HM05]. Brownian
1.5. HARD SPHERE COLLOIDS CHAPTER 1. INTRODUCTION AND BACKGROUND
given by the Stokes-Einstein-Sutherland[Ein05b; Sut05]relation:
D=kBT/6πηR (1.7)
whereT is the fluid temperature, typically room temperature,ηis the fluid viscosity,Ris the particle radius, andkB is Boltzmann’s constant. Note, the relation is commonly referred to as the Stokes-Einstein relation, but Sutherland should also be credited for arriving at the relation independently
and submitting for publication earlier (Marchvs.May, 2005)[Wee07; SQ05]. The corresponding
fluctuation-dissipation theorem[Kub66]gives the relation between the mean squared displacement and this diffusion constant〈(x−x(0))2〉=2D t. Thus, the viscosity of the fluid controls the diffusive dynamics of the single particle.
1.5.2.2 Sedimentation
Under the influence of gravity, suspensions sediment over time. However, because of Brownian motion, the particles do not all lie at the bottom of the container. At equilibrium, the packing fraction φ=N V1/Vtotal(the fraction of available volume occupied by the particles), follows a Boltzmann-like distribution versus depth:
φ(z) =φ0(−z/z0) (1.8)
wherez0is set by the ratio of gravitational to thermal energy:
z0=
kBT ∆ρ4
3πR3g
(1.9)
and where∆ρis the density difference between the particles and the fluid,Ris the particle radius, andg is the gravitational acceleration. At low Reynolds numbers, the rate of sedimentation is given by balancing gravity with the Stokes drag:
vsed= 2 9
∆ρR2g
η (1.10)
For more details on the sedimentation distribution or sedimentation velocity, see Weeks[Wee07].
Note, both of the relations given here are valid only in the dilute limit, and observations deviate from these expressions for higher packing fractions. Even more drastic deviations occur in polydisperse
systems and non-spherically shaped particles, due to the prevalence of unusual velocity fluctuations
1.5. HARD SPHERE COLLOIDS CHAPTER 1. INTRODUCTION AND BACKGROUND
1.5.3 Interparticle Interactions 1.5.3.1 Van der Waals force
The van der Waals (vdW) interaction contributes a large fraction of the energetic effects in colloidal
and biological systems[Lan74; Eli91]. The vdW force is the primary source of instability in colloidal
suspensions, thus minimizing the influence of the vdW force is the main challenge of creating suspensions with nearly hard sphere interactions. Misconceptions abound about the vdW force,
and the existing reviews do not review the issues at a level appropriate for this thesis, so we will review the vdW force in greater detail than any other interparticle interaction to make up for this
gap in the existing literature.
The existence of an attractive force between neutral atoms was first proposed by van der Waals in his PhD thesis[Waa73; Van88]. Originally, all types of dipole-dipole forces were referred as vdW
forces: orientational, inductional, and dispersive forces. But the most common usage today is to use
vdW force to refer only to the dispersion force. The traditional explanation of the origin of the vdW force is by the semiclassical London theory of dispersion forces, in which the force arises due to
the cross-correlation of fluctuating polarizations[EL30; Lon30; Lon37]. Using London theory as the
atomic vdW force (U ∝R16) and assuming pair-wise additivity, Hamaker obtained the vdW force
between spherical particles[Ham37]. Although significant deviations from Hamaker theory have
been reported for the value of the vdW force in aqueous suspensions[NP71; Smi73; TGR01], the
general tendency remains to use Hamaker theory (see section 1.5.3.2). Rather than use Hamaker theory as a predictive theory, the standard approach is to compute a Hamaker functional form for
specific geometries and to use an experimentally derived value for the Hamaker constant.
Because colloidal experiments showed the attractive interaction decays with distance faster than the London theory prediction used in DLVO theory, Overbeek[VO48]speculated that the discrepancy
was due to retardation effects at large separations due to the finite speed of light[CP48]. Inspired
by this[CP48], Casimir corrected for retardation effects in London theory to yield the expressions that are regarded as the Casimir force[Cas48; CP48]. Experiments by Tabor and Winterton
demon-strated the transition from non-retarded to retarded functional form at separations greater than
20 nm[TW68]. These results are the basis of the modern understanding of the vdW force as a type of Casimir force. One important prediction that has been confirmed experimentally[Mil96; Lee01;
Mun09; BS12]is the possibility of repulsive vdW forces between macroscopic objects depending on geometry and material properties. These repulsive vdW surfaces have been used to produce
ultra-low friction contact between colloidal particles and surfaces[Cap07; Fei08], which could have
further applications in novel sensors.
1.5. HARD SPHERE COLLOIDS CHAPTER 1. INTRODUCTION AND BACKGROUND
as a depletion force of electromagnetic modes. This allowed Lifshitz to overcome the assumption of pair-wise additivity by packaging the material response in a frequency dependent dielectric
susceptibility. The dielectric susceptibility allows accounting for the many-body interactions specific
to the material. Lifshitz theory contains as limiting cases both London theory and the Casimir corrections. Hough[HW80]reviews in practical detail the methods needed to calculate a Hamaker
constant using Lifshitz theory and applies the methods to compute the Hamaker constant for a
polystyrene-water-polystyrene system, the material choices relevant to this thesis. He finds two values, 0.911 and 0.950×10−20J, depending on which reference he uses for the material constants.
For other material combinations, the Lifshitz theory of the Hamaker constant gives[Lar98]:
A=3 4kBT
" A−"B "A+"B
2 + 3
16 hνe
p 2
nA2−n B2 (nA2−nB2)3/2
(1.11)
where"i is the static dielectric constant of materiali (i =A or B),ni, is the index of refraction of materialiandνe is the UV absorption frequency of the materials (assumed to be identical). In the classical picture, this frequency represents the rate of spontaneous fluctuation of the dipoles, and it
typically has a value of 3×1015 Hz[Lar98]. The first term in Eq. 1.11 includes the zero-frequency orientation (Keesom) and induction (Debye) polarization terms, while the second term is the London dispersion contribution. See Chapter 6 of “Intermolecular and Surface Forces” by Israelachvili[Isr11]
for an accessible treatment of the Hamaker constant derivation in Lifshitz theory.
1.5.3.2 DLVO model
Derjaguin-Landau-Verwey-Overbeek[DL41; DL93; Ver47; VO48](DLVO) theory is the standard model of interparticle colloidal forces. DLVO theory computes the total interaction energyUDLVO between two finite-size spheres in a fluid, by adding the vdW interactionUvdWand the screened electrostatic interactionUDLbetween the two spheres. Simplifying assumptions are used to calculate each term, which limit the generality of their result. The vdW interaction is computed by using the
Derjaguin approximation. The screened electrostatic interaction uses a mean-field approximation,
in the limit of low surface potentials. The main result of DLVO theory is that the form of the interaction potential between two spheres in a fluid is a Yukawa potential, with interaction length given by
the Debye-Huckel screening length 1/κ. Despite its simplicity, the theory has good experimental
support, with a broad range of validity. For a review of the historical development of the theory, see Wall[Wal10]. For a survey of experimental tests of the theory, see McLaughlin[McL89]. For a review
of applications of DLVO theory to unconventional geometries, see Hansen & Lowen[HL00].
1.5. HARD SPHERE COLLOIDS CHAPTER 1. INTRODUCTION AND BACKGROUND
The screening occurs because the counterion distribution around each sphere is not uniform. In the dilute limit, the counterion distribution around a single-sphere is well-described as a double-layer.
As its name suggests, the structure of this equilibrium double layer has two layers. The inner layer,
known as the ““compact layer” or the “Helmholtz layer” or the “Stern layer”, includes low-mobility ions that are tightly bound or adsorbed to the surface and its width is of atomic dimension. The outer
layer, the “diffuse layer” or the “Gouy-Chapman layer” contains anions and cations (counterions)
distributed according to the Poisson-Boltzmann equation. The surface potential at the shear plane, the interface between the Stern layer and the Gouy-Chapman layer, is the experimentally accessible
surface potential known as theζ-potential.
The main result of the Guoy-Chapman-Stern[Hel53; Gou09; Cha13; DH23b; DH23a; Ste24; Lev90] theory of the diffuse layer is that, ignoring effects from overlapping diffuse layers, the screened
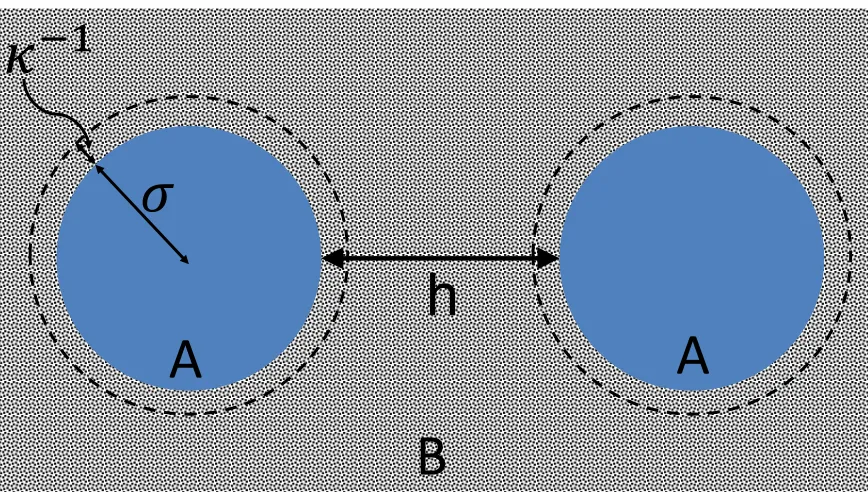
repulsive interaction between two spheres follows a Yukawa potential[Bus85]:
UR(h) =K e−κh
h+2σ, (1.12)
whereh=r−2σis the intersurface separation (surface-to-surface separation, see Fig. 1.2),r is the center-to-center distance,K =Z2λ
B e
κσ
(1+κσ)2 =ζσ,Z is the bare surface charge,λB is the Bjerrum length of the medium,σis the sphere radius, andζis theζ-potential.
The vdW force expression that is standard for the DLVO theory is derived from Hamaker theory
and yields[Bus85]:
UvdW(x) =−A 12
1 x2+
1
x2−1+2ln
1− 1 x2
, (1.13)
1.5. HARD SPHERE COLLOIDS CHAPTER 1. INTRODUCTION AND BACKGROUND
h
𝜎𝜎
𝜅𝜅
−1
A
A
B
Figure 1.2DLVO Parameters
1.5. HARD SPHERE COLLOIDS CHAPTER 1. INTRODUCTION AND BACKGROUND
1.5.4 Bulk modulus from DLVO potential
In this section we discuss how, unlike atomic crystals, theU(r)interaction potential from DLVO theory fails to universally account for the elastic properties of colloidal crystals, even in cases where
interparticle separation is on the order of the particle size and mechanical contact forces can be ignored[Wei98]. In colloidal crystals with long Debye lengths, the interparticle separation can be
tuned. For an interparticle separation of 6d, Weiss et al. find the interparticle coupling in the crystal
weak enough for the bulk modulus to be well-described byU(r)alone. However, reducing the interparticle separation from 6d to 4d, still long-ranged by typical colloidal standards, yields a
strong enough coupling to enable nonadditive interactions. These collective effects produce bulk moduli much weaker than expected from pairwise DLVO interactions alone. More recent elasticity
measurements[Rei07]have confirmed that non-central forces are necessary to explain the elastic
behavior of an fcc lattice of a charged suspension. Theoretical precedents[Dob03; Rus02; Hyn03] support the concept that the bulk modulus in these dense suspensions reflects more thanU(r)and includes many-body interactions. This failure motivates our exploration of the bulk modulus in
Chapter 4.
1.5.5 Steric stabilization: non-DLVO forces
On close approach between suspended particles, adsorbed polymer layers on particles repel each
other, preventing aggregation by vdW forces. Reports of steric[HP54]stabilization of colloidal
dispersions by an adsorbed polymer or surfactant layer date back to carbon black inks made by the ancient Egyptians circa 2500 B.C. [Rus92; Nap83]. The clearest experimental verification that vdW
forces could be overcome at short-range to produce a net-repulsive interaction in polymer-coated
surfaces goes back to Cain et al.[Cai78] [Van88]. This stabilization process is very important in a number of practical applications such as oil recovery, food industry, paints, etc[KL07b; Nap83].
Russel et al.[Rus92]and Napper[Nap83]provide a detailed historical review of the literature in polymeric stabilization and detailed experimental results on the structure and interactions between
adsorbed layers. The physical origin[Gra02]of this interaction is an entropic force, due to the
reduced configurational entropy of the polymer chains attached to the surface.
According to the DLVO model, particles in suspensions are electrostatically stabilized against
aggregation. However, even in the absence of external driving, a finite aggregation rate due to
thermal fluctuations is generally observed. This flaw is to be expected, since the DLVO model is a mean-field model without regard for large fluctuations in the surface charge of the dispersed
particles. The inclusion of non-DLVO steric stabilization forces makes the interparticle potential at