A Robust Vein Pattern-based Recognition System
Mohit Soni
Directorate of Forensic Science, New Delhi, INDIA Email: [email protected]
Phalguni Gupta
Indian Institute of Technology Kanpur, Kanpur, INDIA Email: [email protected]
Abstract—This paper presents an efficient human recognition system which makes use of vein patterns obtained from the back of the hand. It has used a new reflection-based image capturing environment to ensure high quality images through least effort and cost. The proposed recognition system automatically detects the region of interest (ROI) from the image and does the necessary preprocessing to extract features. Extracted features from ROI are compared to obtain the matching score and to take the decision. It is tested on a data set of 4950 images collected from 990 individuals. The accuracy of the recognition system is found to be 99.11% with a false acceptance rate of 0.4%.
Index Terms— Recognition System, Vein Pattern, Active Contouring, Line Fitting, Forking Point.
I. INTRODUCTION
The existent biometric traits with variable capabilities have proven successful over time. Traits like Face, Ear, Iris, Fingerprints, Signatures etc., have dominated the world of biometrics over the years. But each of these biometric traits has its shortcomings. Ear and iris pose a problem during sample collection. Not only is the iris based system expensive but it also needs high attention or otherwise it has a high failure to enroll rate. In case of ear data, it is hard to capture a non-occluded image in real time environment. In face recognition systems, there exist some limitations like effects of aging or background, etc [13]. Fingerprints, though reliable and accepted worldwide, still lack automation and viability as they are also susceptible to wear and aging. Further, signatures are liable to forgery.
Vein patterns, on the other hand, have the potential to surpass most of the above mentioned issues. Apart from the size of the pattern, the basic geometry always stays the same. Unlike fingerprints, veins are located underneath the skin surface and are not prone to external manipulations. Vein patterns are also almost impossible to replicate because they lie under the skin surface [8].
Reflection based techniques for capturing veins from the back of the hand have been suggested in [1][3][15] while Watanbe [18] has collected templates from the front. Badawi [1] has also tried to establish the uniqueness of vein patterns using patterns from the palma dorsa. The data acquisition technique mentioned in [1] is based on a clenched fist holding a handle to fix the hand
during image capture. This technique, however, has limitations with respect to orientation of the hand. Substantial works in this field have been done by Wang and Leedham [15][16][17]. In these, thermal imaging of the complete non fisted hand has been done using infrared light sources. Generally, near infra-red lamps of intensity-value ranging from 700nm to 900 nm in wavelength are used to design such a system [16]. It has been observed that the images captured through a reflection based system, as proposed in [15], would never produce consistent results owing to excessive noise generated due to unnecessary surface information unless an apt noise removal algorithm is applied. A system of capturing images from the front of the hand has been proposed in [14]. However, in this case the palm prints may interfere with the pattern of the veins.
Numerous attempts have also been made in the recent past to capture vein templates and successfully employ them as recognition traits [3][11]. There are nooks and flaws with either the image processing techniques employed or the matching strategies that are used. Importantly, it can be noted that the failure to enroll (FTE) rate, which is an important parameter for any biometric trait, is never reported by any of the recent research papers.
Failure to enroll rate is the percentage of the population which fails to complete the enrollment for a biometric solution or application. Failure can be due to physical differences, to lack of training, environmental conditions or ergonomics. It is mandatory in the current practical scenario to consider the FTE for every proposed system. If any system requires extensive training for its usage or fails to collect usable data consistently-it shouldn’t qualify. This can be envisioned or presumed as the reason for small sample sizes in [1][3][11][14] [15][16][17].
images obtai to be 99.11%
The paper the proposed The experim been analyze stated in the
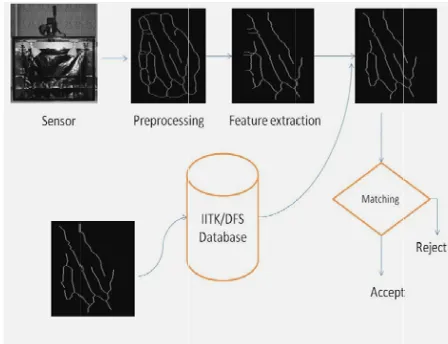
Like any o recognition s are (i) Imag data, (iii) Fe Figure 1 show
Fi
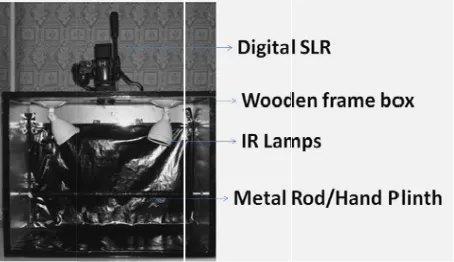
A. Image Ac Image qu recognition s set up is des quality of ve acquisition hemoglobin appears blac system can u the light ca transmitted t the opposite of images-t consideration The set-up been designe consists of a open front fa centre of the in the back approximatel of the box. focuses thro interior surfa infra-red lam connected to a complete a
ined from 990 %.
r is organized d recognition mental results
ed in Section final section.
II. PROP
other biometri system consis ge Acquisition
eature Extract ws the flow di
gure 1. Flow Dia
cquisition uality plays system. For th signed in such ein patterns fro procedure r present in th ck under infra use IR lamps o an be reflecte o it [2][15][16 side [14]. In the FTE ra n at this stage. p of the propo ed for collecti box with a ho face. A metal e side walls of k of the bo ly 10 inches a The camera ugh the hole ace of the roo
mps of wav o an external b and consisten
0 subjects. Its
d as follows. S system based
of the propo 3. The conclu
POSED SYSTEM
ic system, the sts of four ma n, (ii) Prepro tion, and fina iagram of the
agram of the Prop
an importa he proposed s
h a way that om the back o relies on th he vessels of a red (IR) ligh of wavelength
ed on the d 6]. It can also order to colle ate is the .
osed reflection ng data is sho ole cut on its
rod has been f the box. The ox that hold away from the when moun in the roof of of the box velength 850
battery. Lamp t infra-red en
accuracy is f
Section 1 pre d on vein patt osed system uding remark
M
vein pattern b ajor tasks and ocessing on im ally (iv) Matc
system.
posed System
ant role in ystem, a hard
one can get of a hand. The he fact that
f the human ht. An acquis h 700-1000 nm desired surfac o be absorbed ect a large qua most impo
n based system own in Figure
top surface an n fixed joining ere is a fixed s ds the tripo e rod in the c nted on the tr
of the box. is fitted with nm. These ps when lit pro nvironment fo found esents terns. have ks are based they mage hing. any dware good e data the hand sition m and ce or from antity ortant m has e 2. It nd an g the stand od at centre ripod The h two e are ovide or the hand cam pape cont has b mov betw almo surfa ensu infra P care belo • • • • T henc fiste appe zero ensu imag syste a us all relat subj is co T occu hand of a exac can issue up. T to th of th tatto B. P T cont requ to ex imag imag secti from task Enh Dila (vi)
d that can b mera. Inside o er to provide trast and a uni been blackene vable cardboa ween them un
ost opaque b face of the box ures a unifor
a-red light for arameters req efully studied ow:
• The distan
• The positi
• The fixed
• The focal camera len
hese paramet ce, ensure un ed hand make
ear clearly in t o ambient int ures images in ges of high r em ensures a eful region of cases irrespe ted scars or
ect’s skin. Re ountered in the
he only facto ur during ima d since there i human hand ct distance be
never be pre e, necessary a The focal shif he order of mi he desired con oos on hands i
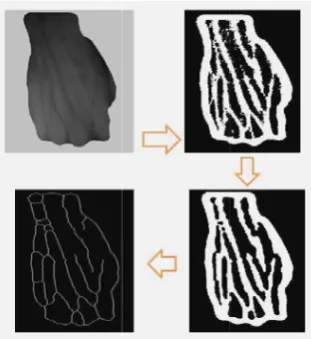
Preprocessing he color imag tains some a uired for the d xtract the reg ge and finally ge from whic ion presents m the colored
s and they ancement (ii ation and Skel Connecting d
e placed on of the box is all the acquire iform backgro ed as well. Th ard partitions nder the camer black curtain
x. It enables t rm and unad
the subject’s quired for ge
in making
nce between th ion of the lam
area for the p l length and ns.
ters are kept niformity in th
es the veins the collected i terference. T n good contras resolution. Th
negligible FT f interest (RO ective of the
discoloration elative translat e hardware se or due to wh age acquisition is no control o
in a practica etween the obj
e-determined arrangements ft of the came illimeters ensu nditions. Also nterfere with
ge acquired th additional inf desired vein p gion of interes y, to convert i ch one can ge a method to
palm image. are (i) S ii) Binarizati etonization, (v disjointed edge
the rod/plint covered by ed images wit ound. The cyli his rod also co s that can f ra orifice. Th covering th the hand to sli dulterated env
hand. etting consist
the set-up an
he camera and mp.
placement of t the exposure
t constant thr he collection pop out and images. The s he consistent st. The digital he non-comp TE rate , i.e., a I) gets registe skin color, ns, or the th
tion or rotatio et-up as well.
hich an incon n is the size o over the girth al scenario. As bject and the c or fixed. To have been ma era which can ures the relati o, it has been successful im
hrough a cam formation wh patterns. So th
st (ROI) from it into a noise enerate the ve
extract such It consists of Segmentation, ion and Filt v) Venal patte es, and (vii) N
th, under the black glazed th the desired indrical plinth omes with two fix the hand ere is also an e open front ip in and also vironment of
tent data are nd are given
d the lamp.
the hand. e time of the
roughout and process. The d hence, they set-up ensures t background l SLR ensures plexity of the an image with ered in almost skin disease hickness of a on of the hand
nsistency can of a subject’s and thickness s a result, the camera’s lens o counter this ade in the set-be fine tuned ve prevalence observed that mage capture.
Segmentat Badawi [1] image as the Leedham [15 to segregate observed th selection em manual inte segmentation segregate the select the RO any kind of technique ba al. [7] wit contouring w To begin wit the image. T order to dete time. The in parametric cu eventually to
where η1 an importance o contour resp second order Eext is the e order to min smaller value
Eext for the be calculated image I(x, y) the typical ex edges, can be
where ∇ image the int the gradients by
max Econtour
1
0
=
∫
Figure 2. Im
tion is the f has consider e region of in 5] have used a an ROI from t hat all well
mploy incon ervention dur n technique pr e skin area fr OI in a system manual inter ased on active th a commo works on the th, the user in This is suppose
ect the bounda nitialized activ urve v(s) = [x o minimize the
nd η2 are w of the elastic a ectively; v’(s) r derivatives o external energ nimize the abo es at the objec e image which d beforehand ), where (x, y) xternal energy e defined by
| , |
is the gradie tensity gradie s of R, G and
x | |, | |,
s v'( ) ( 2
1 2
1 +
η
mage Acquisition S
first and the ed the skin c nterest (ROI) anthropometri the acquired i known tech nsistent techn ring processi roposed in thi rom the acqu matic manner. rvention. It is contouring pr on cropping
principle of nitializes a con
ed to bend, ex ary of an obje ve contour ca x(s), y(s)],s e following en
weights to co and bending a ) andv′′(s) ar of the initial cu gy derived fro ove function, ct boundary.
h depends on d. For instanc ) are some sp y to lead the co
ent operator. nt which take B bands at ev
| |
s v"( )2)
2 +
+η
Set-up
most vital component o ) while Wang ic points of a images. It has hniques for niques and ing [3][11]. is paper is us ired image an It also gets r the fusion o roposed by Ka
technique. A intensity grad ntour anywhe xpand or with ect with respe an be defined [0, 1] which nergy function
ontrol the rel ability of the a re the first an urve equation om the imag Eext needs to
gradient, nee ce, considerin patial co-ordin ontour toward
(2)
For any co es the maximu very pixel, is g
ds s v Eext( ( )) +
step. f the g and hand been ROI need The ed to nd to rid of of the ass et. Active
dient. ere in her in ect to as a aims n.
(1) lative active d the n,and ge. In
hold
eds to ng an
nates, ds the
lored um of given
(3)
T the cont satis
w orde resu equa = 0 w
an
It resp whe towa mov shar both curv mini each obje segr T fit a vary
v(
whe step use the f is do H snak et al in, it of th sam for a subj resu segm (RO
T into Gau imag pred is re
herefore, it is above equati tour. Any acti sfy the followi
where vii(s) an er derivatives ultant of the fo ation as a forc
where
nd
t can be no onsible for th ereas Fext is th
ards the desir vement is a fu rp shift in gra h the forces ve. The energ imized when h other. The c ect and the for regated. The active con around the obj
ying curve.
(s, t) = [x(s, t)
ere s [0, 1] a of active con of a cropping foreground fr one automatic However, it sh ke has been m
l [7]. Instead t executes in r he image as in e size, the init any image. T ective selecti ults more acc
mented image OI).
he extracted a grey scale ussian filtering ge for enha defined mean equired to neg
s clear that th ion is the dri ive contour th ing Euler equa
nd viv(s) are t of v(s). The orces acting on ce balancing eq
oticed that F he stretching he external fo red features in unction of the adient would that are actin y function of
these two an contour finall reground and
ntour deforms ject. It can als
), y(s, t)]
and is arc leng ntouring is fo
tool which he rom the backg cally and almo hould be noted modified from of initiating t reverse, after n [14]. Since a tiation can alw This minimize
ions during s curate. Figure e which is ter
ROI of the c image using g technique i ancement an and variance. gate any anom
he gradient ob iving force f hat minimizes
ation
0
the second an energy of the n it. Consider quation, one g
Fint is the in and bending rce that drive n the image. T e gradient of
mark the eq ng simultane
the contour, E ntagonistic fo ly rests aroun the backgroun
s itself with tim so be represen
gth and t R ollowed up by
elps to extract ground [7]. Th ost flawlessly.
d that the activ the one prop the snake from initiating it fr all images are ways be done es manual inte
segmentation, e 3 shows t rmed as Regio
colored image g any well kn is used on th nd normaliza This type of malies during i
btained using for the active Econtour, must
(4)
nd the fourth e contour is a ring the above gets Fint + Fext
(5)
(6)
nternal force of the curve es the contour The contour’s the image. A qualization of ously on the Econtour, can be orces equalize nd the desired nd are clearly
me to exactly nted as a time
(7)
R+ is time. The y the iterative t the object in his extraction
ve contouring posed by Kass m the outside rom the centre exactly of the automatically ervention and , making the the extracted on of Interest
e is converted nown method. he grey scale ation into a f enhancement image capture g e t
h a e t
e e r s A f e e e d y
y e
e e n n
g s e e e y d e d t
viz. light con etc. Figure 4
Figu
The resul located in t However, it i there may ex pepper noise Median filter type noises [ scale image t
For furthe tree be freed can be thus d of veins-sans is required f proposed s immaculately and robust. skeletonized horizontal li coordinate o the first and in both axes computed. A
nditions, ambi shows the enh
Figure 3
ure 4. Grey scale
ltant image the image a is observed, th xist many addi e, blobs, stains ring can be u 4]. Figure 5 sh to a noise free
Figure 5. Dila
r processing, d from the out defined, as the s the boundary for further us system to c
y, subject afte From the veins are ine (one pixe f an image al the last image , are then tur All structure
ient interferen hanced and no
. Segmented Imag
Conversion and N
is then bina and an edge
hat along with itional compo s, and a few u used to remov
hows the conv e binary edge m
ation and Skeleton
it is now requ tline of the ha e skeletonized y of the hand. sage. It is thi capture legi er subject that skeleton of extracted. A el thick) are lternatively. T e pixels encou rned black and es inside the
nce, camera sh ormalized ima
ge
Normalization
arized. Edges map is cre h the desired v onents like sal unconnected ed
ve salt and pe version of the map.
nization
uired that the v and. The vena d connected pa
This pattern a is potential o ible venal t makes it sup f the hand, A vertical an
run through The coordinat untered by the d the venal tr e hand boun
hake, age.
s are eated.
veins lt and dges. epper grey
venal l tree attern alone f the
trees perior the nd a
each tes of e line, ree is ndary
cont and amo labe CCL been in a remo less gene
It palm How segm dete but brok whic base is a Hou in an (fork any viola recu In t loca conf initi dete F are ( the p from devi the p stay devi segm poin pixe equa poin
tain the venal segments. In ong veins for eled and other L (Connected n modified to an image. T oves all isolat
than a spec erated venal p
F
t is observed ma dorsa are wever, there is ments may h ection. These b
are relevant. ken edges. T ch can be use ed on Hough recursive alg ugh transforma n invariable s king points) th
shift in the o ation of the a ursive algorith
this algorithm ated in a bin fronts an end ate and term ection is expla
or an edge co (x1,y1) and (x2, points. A devi m the actual
iation is mark permissible th ; otherwise, th iation is consi ment. The pr nts. The perm els only to pro
ation of the l nts of the line
l tree along w order to obtai
the tree, all c rs are discard
Component L determine all This modified ted and discon
cified thresho pattern for som
Figure 6. Venal T
that the des line segmen s a possibility have some b breaks may be Therefore, it There are two ed to link brok transformatio gorithm [10]. ation promise shift in the po hat are to be e original featur authenticity o hm proposed in m, different ‘
nary edge im ding or a sp minate. The ined below. ontour, E, if t
,y2) then a lin iation is charte
contour and ked. If the ob hreshold, the
he coordinate idered as the rocess is then missible thresh otect the orig line having ( segment can b
with some iso in only desired connected com ded. In order Labeling) algo the connected d algorithm nnected compo old. Figure me skeletonize
Tree Generation
sired vein pa nts of conside y that these co break in them
e as little as a is necessary o well know ken edges. Th
n [12] while . The algorith es to be faster osition of the f
extracted subs re point is co f the original n [10] has no edge contour mage. Whene litting, the e process of e
the starting an ne segment is d ed out for this d the point btained deviat
line segment e of the point new end poi n repeated w hold is set to ginality of the (x1,y1) and (x be represented
olated islands d components mponents are to do so the orithm [9] has d components detects and onents of size 6 shows the ed veins.
atterns on the erable length. ontinuous line m after edge missing pixel to join these wn algorithms he first one is the other one hm based on r but it results feature points sequently. But onsidered as a l sample. The such problem rs’ are to be ever an edge edge contours edge contour
nd end points drawn joining s line segment of maximum tion is within is allowed to of maximum int of the line with new end o as low as 2 e sample. The x2,y2) as end
d as
0 (8)
s s e e s s d e e
e . e e l e s s e n s s t a e m.
e e s r
The maxim contour from
where
This task h segments wh with the spe compact repr image contai for the select surface nois contours of a Reflection surface noise appear as b successful ca as noise conn be removed Rejection of increase the Therefore, it edges due to proposed lin proposed lin ridges and d observed in segments in smaller in siz (threshold) is from the han
It has been removed th Experimenta length less th
Figure
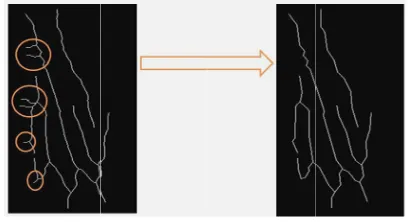
Figure 8 method wher noise due to fitting is state
mum deviatio m the fitted line
helps to break here each on ecified permis resentation to ining edges w tion of featur e. Figure 8 a pattern mark n based image e. It has been black as the apture of a pre nected to the v d to get rid f samples du failure to en t becomes m o the body h ne fitting alg ne fitting alg displays them n Figure 7,
cohesion to t ze. Any edge s considered t nd's dorsal surf n observed th he noise c ally, it has be
han 20 (pixels
e 7. Individual Ed
shows the re the horizon o hair. The alg
ed below.
on of a point e segment can
k down an edg ne adheres to
ssible deviatio the acquired with the fitted e points and f shows all th ked distinctly i e collection sy observed that veins. These ecise skeleton venal tree. Suc d of spuriou ue to such ty nroll (FTE) ra mandatory to
hair which can gorithm. Figu gorithm distin
in a graph fo there exist the main vena contour below to be a false e face. hat this metho created by
een observed ) are found to
dge Contours ma
results obtai ntal encircled gorithm for th
(u,v) on the n be calculated
(
ge contour into the original on. It also giv vein patterns
lines can be for the remov e individual in color. ystems are pro
t coarser body hairs inhibi n since they ap
ch patterns ha us feature po
ype of noise ate of the sys remove the n n be done by ure 7 reveals nguishes betw or observation
some horiz al tree. Thes w a particular edge and is de
od has success the body d that contour be false edge
arked in color
ined through d lines indicat
he process of edge d by
(9)
and
o line data ves a . The used val of edge
one to y hair t the ppear ave to oints. may stem. noisy y the s the ween n. As zontal e are r size eleted
sfully hair. rs of es.
this te the f line
__ A __
__
C. F P for matc their extra
Figure
___________ ALGORITHM ___________ Input: Ve Output: T
1. Divide individua and , total nu individua that whe splitting, Set i=1.
2. Choose a
3. Draw a ,
4. Calculate ,
where
5. Find the
6. If between , the rest o
7. If edge con
,
8. 1
___________
Feature Extrac atterns obtain obtaining va ching. Feature r characteristic acted in two s
8. Noise Remova
____________ M 1: Line Fittin ____________ enal pattern im The line fitted
all the ridge al contours , where i umber of con
alization is b enever an edg
, the edge con
an edge conto
a virtual line .
e the distanc in the contou
and
value of k for
the
, a
and g of the edge co
for ntour, draw a
in L.
1 and go to St ____________
ction
ned as a result aluable featu e points need cs need to be steps. A featu
al through Line-f
____________ ng
____________ mage
d vein pattern
es in the pa with end po i = 1, 2, ...,n ntours in a based on the e confronts an ntour initiates
ur Ei.
e between
e of line from ur using formu
r which m
en draw a lin and , go to Step 4 t
ntour.
all points line between
tep 3 until ____________
t of processin ure points w
to be located calculated. Fe ure point is a p
fitting
___________
___________
image L
attern into oints , n and is the
pattern. This e information n ending or a or terminates.
, and
m each point ula:
max
ne in image . Set to fit line for
, on the
, and
.
___________
ng are utilized which aid in first and then eatures can be point where a e s n a .
d
t
r
e d
vein segmen splitting poin word bifurca patterns. Thi these feature
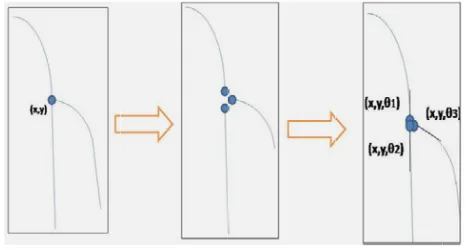
Forking D In this su forkings from processed i lines/ridges. as a feature number of a represented a examining th using a 3×3 w For a pix window are s
The A for
∑
It can be and they repr
A 1 2 3 4
There cou forking poin higher [14]. B existing data ridge forking pixel is 3 or as a feature p and y are extraction is true forking respective co Angle Cal All ridges move in the respect to th treated as th with end po gives the slop
tan
nt splits into nt is termed ation may not is section dis points and ca
Detection ub-section a m the skeleton image an R
Ridge forking and can be arms originat
as A. One ca he local neig window. xel P, if its scanned in an
P4
P5
P6
a pixel P can
| |
seen that ther resent the foll
refers to Ridge Te Continuo Forking P Forking P
uld be more arm nt and the su
But, such a ca abase. Thus, a g for a vein p more. This ri point which c its coordina applied on R g points whi oordinates x an lculation
emitting out eir own dire heir x-axis. E he termination
ints (x0,y0) an pe of these lin
two or mor as a ‘forking t always be a scusses the te alculate the an
technique w n image has be ROI contain
g in the ROI determined b ting from a p an find the nu ghborhood of
neighboring anti-clockwis
P3 P2
P P1
P7 P8
be computed
,
re are four po owing:
ermination ous Ridge
Point (with 2 Point (with 3
ms originating ubsequent valu ase has not be
a given pixel pattern if the v
idge forking p can be defined tes. This m ROI to extrac
ich are repr nd y.
of a forking p ction at diffe Each forking p n point of th nd (xi,yi) whe nes, then θi ca
re segments. g point’ since applicable for echnique to lo ngle of split.
which extracts een presented
s some thi can be consid by computing pixel. This ca umber of arm f each ridge
pixels of a se direction as
by
ossible values
arms) arms)
g from a parti ue of A coul een observed i l P is termed
value of A fo pixel is consid d by (x, y) wh
ethod of for ct all relevant resented by
point (usually ferent angles
point (x,y) ca hree line segm
ere i=1,2,3. L an be calculate
This e the
vein ocate
s the . In a inned dered g the an be ms by pixel
3×3 s:
(10)
of A
icular ld go in the
as a or the dered here x rking t and
their
three) with an be ments Let θi
ed by: (11)
T conn with all t obta T resp vein vein featu the p
D. M Su featu patte data and for a it tri the d not thres that betw the v In matc lead type cons L betw thes n×m
D
of B give with whe matc
his value of nectivity of th h its x-axis. Si the arms emi ained vein patt hese angles ective forking n pattern. Supp n pattern. Then
ure points, ea process of ang
Figure 9. Angle
Matching uppose, A an ures respectiv ern to be teste abase where a B respectivel ascertaining a ies to find a p
distance betw only minimu sholds. If such
these two po ween ai and bj values of the a n this approac ch with more ds to register e of false ma
sidered. Let W be an
ween ai and bj e points are n m matrix RMij,
0 1
Define array R
∑ .
B which can b es the number h bj. Let us d
ere SELECT[i]
ch of ai with a
angle gives he ridge/arm a imilarly, the a itting out of tern.
along with g points are co pose there are n, for each fo ach of 3 tuple gle calculation
e Calculation of E
nd B are two vely. Let, A= ed against B = ai, and bi repr
ly. Euclidean match. For a point bj, j=1, 2 ween two poin um but also l h a point bj ex ints are match j. A similar ap angles of stret ch, however, t than one ai w false match. atch, the follo
n×m matrix bj if ai and bj not matched. F
known as rela
if otherwi
R and C such Then Ri give
be considered r of elements define an arra
] is used to in
any element i
information r and also the a angle can be c
each forking
the coordina onsidered as f
n forking poi orking point th e (x, y,θ). Fig n.
Each Arm from a
patterns hav {a1, a2, a3 ,… ={b1, b2, b3,…
resent 3-tuple n distance me given feature 2, 3…m in B s nts and their d
less than thei xists, then one hed. Let wij be pproach is em tch.
there is a pos with a particu In order to g owing approa
where wij is
are matched Further, let the ation matrix s
∞ se
h that ∑ es the numbe
as matched w s of A which ay SELECT o
ndicate wheth in B, then SEL
regarding the angle it forms calculated for point in the
ates of their features of the ints in a given here are three gure 9 depicts
Forking Point
ving n and m …., an} be the , bm}from the e feature of A easure is used e point ai in A, such that both difference are ir pre-defined can conclude e the distance mployed using
ssibility to get ular bjand this get rid of this ach has been
the distance and is +∞ if ere be another
uch that
(12)
∑ and
r of elements with ai and Cj
h are matched of n elements her there is a LECT[i] is set
e s r e
r e n e s
m e e A d , h e d e e g
t s s n
e f r
d s
j
to 1 so that a of B for matc is the minim and SELEC element in B should selec matched with
In order with ai, one minimum in i.e., RMij=1. other elemen the ith
row an way one can such that no
This proce element in B until all elem the matching which are m noted that nu n). Then the be defined by
If Ms is fou can conclude
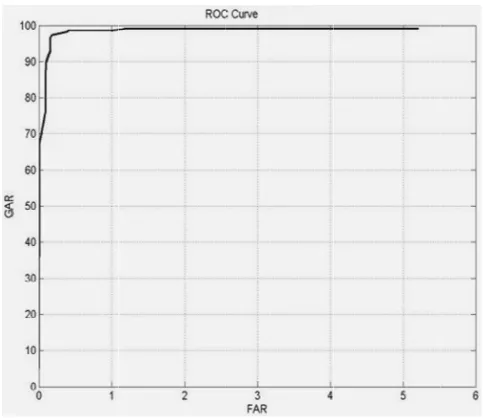
The propo database [14 consists of 4 Out of these, against vario which is sh accuracy of Graphically, of FAR fo accuracy is different val Figure 12.
ai is not consi
ching. At any mum positive in
T[i] is 0 wh
B matched w t at this stag h ai.
to select the searches the
C and there To avoid th nt of B, SELE nd of the jth
co select the ma other element ess is repeated B to be match ments of RM g strategy. Let matched with p
umber of such match score y
, 100 %
und to be less e that A and B
III. EXPERIM
osed system h 4] to analyze 4950 images
, 990 are used ous threshold hown in Figu 99.11% is a it is also foun or which the 0.4%. Finally lues of GAR
idered again b y stage, it can nteger among ich indicates with ai till tha
e an element
element from element Cj in
is a relation he selection o ECT[i] is set to olumn of RM a atch of aiwith
t of B selects a d till there is hed with an e
are zero. Alg t C be the num
points of B u h matches can rate, Ms, betw
%
s than some th are not match
MENTAL RESU
has been tested its performan obtained from d as query sam ds has been p ure 10. It is achieved thro nd from Figur e system ac y, the ROC c against FAR
by another ele be noted that g all elements
that there i at stage, then from B whi
m B for matc n C such that between aian of ai again by 1, all elemen are set to 0. In an element bj ai as a match p
a possibility o element in A, gorithm 4 prov mber of points uniquely. It ca at most be mi ween A and B
hreshold value hed.
ULTS
d against the nce. The data m 990 individ mples. Its accu plotted in a g observed tha ough this sys re 11 that the v chieves maxi curve is drawn R and is give
ement t if Ri
of R is no n one ch is
ching Cj is nd bj, y any nts of n this j in B point. of an , i.e., vides s of A an be in (m, B can
(13)
e, one
IITK abase duals. uracy graph at an stem. value mum n for en in
Figure
Figure 10. Grap
11. Graph repres
Figure 12. The
ph of Accuracy
senting FAR and
IV. CONCLUSION
This paper has introduced vein patterns from the back of the hand to design a robust biometric system. it has presented a hardware set-up of an immaculate acquisition model, an automated segmentation technique, an effective noise removal method, a new feature point selection approach and an accurate matching technique. The proposed system has been tested on a sizable database of 4950 images from 990 subjects and has achieved an accuracy of 99.11% with a very low FAR of 0.4%. The system is found comparable to previous ones with significant additional improvements.
ACKNOWLEDGMENT
The authors wish to thank Mr. Sandesh Gupta and Dr. M.S. Rao for their guidance and valuable help. This work was funded and supported by the Directorate of Forensic Science, New Delhi and the Indian Institute of Technology Kanpur, Uttar Pradesh.
REFERENCES
[1] A. Badawi, Hand Vein Biometric Verification Prototype: A Testing Performance and Patterns Similarity.
Proceedings of the International Conference on Image Processing, Computer Vision, and Pattern Recognition/3-9, 2006.
[2] B. Christensen, Fujitsu Palm Secure Hand Vein
Scanner-Science fiction in news.
http://www.technovelgy.com/ct/Science-Fiction-News.asp?NewsNum=1147. Created July 2nd 2007. [3] C. Lakshmi Deepika, A. Kandaswamy, An Algorithm for
Improved Accuracy in Unimodal Biometric Systems through Fusion of Multiple Feature Sets ICGST-GVIP
Journal 9/3/pp.33-40, 2009.
[4] R.C. Gonzalez, R.E. Woods, Digital Image Processing using MATLAB, Prentice Hall, New Jersey, 2003.
[5] U. Halici, L.C. Jain, A. Erol, Introduction to Fingerprint Recognition. Intelligent Biometric Techniques in
Fingerprint and Face Recognition pp.3–34, CRC Press, Florida, 1999.
[6] Kyun Im, Hyung-Man Park, Young-Woo Kim, Sang-Chan Han, Soo-Won Kim and Chul-Hee Kang, Improved Vein Pattern Extracting Algorithm and Its Implementation.
Journal of the Korean Physical Society, 38/3/pp.268-272, 2001.
[7] M. Kass, A. Witkin, D. Terzopoulos, “Snake: Active Contour Models.” International Journal of Computer Vision, 1/5/pp.321-331, 1988.
[8] I. Khan, Vein Pattern Recognition – Biometrics underneath
the Skin. Article 320-
http://www.frost.com/prod/servlet/market-insight-top.pag?docid=86268767. Created November 7, 2006. [9] V. Khanna, P. Gupta, C.J. Hwang, Finding Connected
Components in Digital Images by Aggressive Reuse of Labels. International Vision Computing. 20/8/pp.557-568, 2002.
[10]Peter Kovesi, Edge linking and line segment fitting.
www.csse.uwa.edu.au/~pk/Research/MatlabFns/. Accessed April 16th,
2010.
[11]A. Kumar, M. Hanmandlu, V. Madasu and B. Lovell, Biometric Authentication Based on Infrared Thermal Hand Vein Patterns. Digital Image Computing: Techniques and
Applications pp.331-338, 2009.
[12]M. Labrecque, M. Sheikh, J. San Luis, B. Manashirov, M. Elsayed, Automated Embedded Optical Object Recognition. Innovate Canada FPGA Programming
Competition, 2008.
[13]R. de Luis-Garcia, C. Alberola-Lopez, O. Aghzoutb, Ruiz-Alzola, Biometric Identification Systems. Signal
Processing, 83/pp.2539-2557, 2003B. Christensen, Fujitsu Palm Secure Hand Vein Scanner-Science fiction in news.
http://www.technovelgy.com/ct/Science-Fiction-News.asp?NewsNum=1147. Created July 2nd 2007. [14]M. Soni, S. Gupta, M.S. Rao, P. Gupta, A New Vein
Pattern-based Verification System. International Journal of Computer Science and Information Security 8/1/pp.58-63, 2010.
[15]L. Wang, C.G. Leedham, A Thermal Hand Vein Pattern Verification System. Pattern Recognition and Image Analysis, of Lecture Notes in Computer Science, Springer 3687/pp.58–65, 2005.
[16]L. Wang, C.G. Leedham, Near and Far-infrared Imaging for Vein Pattern Biometrics. Proceedings of IEEE
International Conference on Advanced Video and Signal Based Surveillance/52, 2006.
[17]L. Wang, G. Leedham, D. Siu-Yeung Cho, Minutiae feature analysis for infrared hand vein pattern biometrics.
Pattern Recognition 41/3/pp.920-929, 2008.
[18]M. Watanabe, T. Endoh, M. Shiohara, and S. Sasaki, Palm Vein Authentication Technology and its Applications.
Proceedings of the Biometric Consortium Conference,
2005.
Mohit Soni graduated from the Delhi University with an honors degree in Biotechnology. He received his Masters Degree in Forensic Science from the National Institute of Criminology and Forensic Sciences, New Delhi. Thereafter he received a research fellowship from the Directorate of Forensic Sciences, New Delhi in 2008 and is currently pursuing his Doctoral degree in Biometrics and Computer Science from the Gautam Budh University, Lucknow.