Availableonlineatwww.sciencedirect.com
ScienceDirect
JournalofElectricalSystemsandInformationTechnology1(2014)212–222
LFC
based
adaptive
PID
controller
using
ANN
and
ANFIS
techniques
Mohamed
I.
Mosaad
a,∗,
Fawzan
Salem
baHigherTechnologicalInstitute(HTI),Egypt bElectronicsResearchInstitute(ERI),Egypt
Availableonline12December2014
Abstract
ThispaperpresentsanadaptivePIDLoadFrequencyControl(LFC)forpowersystemsusingNeuro-FuzzyInferenceSystems
(ANFIS)andArtificialNeuralNetworks(ANN)orientedbyGeneticAlgorithm(GA).PIDcontrollerparametersaretunedoff-line
byusingGAtominimizeintegralerrorsquareoverawide-rangeofloadvariations.ThevaluesofPIDcontrollerparametersobtained
fromGAareusedtotrainbothANFISandANN.Therefore,thetwoproposedtechniquescould,online,tunethePIDcontroller
parametersforoptimalresponseatanyotherloadpointwithintheoperatingrange.Testingofthedevelopedtechniquesshowsthat theadaptivePID-LFCcouldpreserveoptimalperformanceoverthewholeloadingrange.ResultssignifysuperiorityofANFISover
ANNintermsofperformancemeasures.
©2014ElectronicsResearchInstitute(ERI).ProductionandhostingbyElsevierB.V.Allrightsreserved.
Keywords:LFC;ANFIS;ANN;GA;AdaptivePIDcontrol
1. Introduction
Frequencycontrolisakeystabilitycriterioninpowersystems.Toensurestabilityofthepowersystem,activepower balanceandconstantfrequencyarerequired.Frequencydependsonactivepowerbalance.Ifanychangeoccursin activepowerinpowersystems,frequencycannotbeholdinitsratedvalueandoscillationsareincreasedinbothpower andfrequency.Thus,thesystemissubjectedtoaseriousinstabilityproblem.WithproperdesignofLoadFrequency Control(LFC)systems,stabilityofpowersystemnetworksisimproved.
SeveralcontrollershavebeenintroducedforpowersystemLFCtoachieveabetterdynamicperformance.Examples forthesecontrollersareproportionalintegral(PI)control(NandaandKaul,1978),statefeedbackcontrol(Elgerdand Fosha,1970),andoutputfeedbackcontrol(AlddenandTrinh,1994).Recently,intelligentcontroltechniquessuchas fuzzycontrolareappliedtoLFCproblem(HsuandCheng,1991).Mostoftheabovecontrollersdependonfixedgain controlparameters,likePIcontroller.
∗Correspondingauthor.
E-mailaddresses:[email protected](M.I.Mosaad),[email protected](F.Salem). PeerreviewundertheresponsibilityofElectronicsResearchInstitute(ERI).
http://dx.doi.org/10.1016/j.jesit.2014.12.004
Fig.1. Oneareapowergeneratingmodel.
However,fixedgaincontrollersaredesignedatnominaloperatingpointsandmaynotbesuitableforalloperating conditions.Therefore,adaptivegainschedulingapproacheshavebeenproposedforLFC(TalaqandAl-Basri,1999), whereanadaptivefuzzygainschedulingschemeforconventionalPIandoptimalcontrollershasbeenproposedand testedforoff-nominaloperatingconditions.
Sinceitisdifficulttoexaminealltheinput–outputdatafromasystemtosearchforanumberofproperrulesforthe fuzzysystem,automaticdesignofthefuzzyrulesinthefuzzygainschedulingcontrolapproachbyGeneticAlgorithm (GA)isproposedin(JuangandLu,2002).Inthisapproach,afuzzysystemisusedtoadaptivelydecidetheintegral controllergainaccordingtotheareacontrolerrors(ACE)andtheirchanges.
Moreover,anArtificialNeuralNetworks(ANN)approachisalsoappliedfor LFC(Sabahietal.,2007).In this method,amodifieddynamicneuralnetwork(MDNN)controllerwasdesignedtoLFCapplicationinpowersystem forgeneratingelectricitywithgoodquality.MDNNalsowasusedtoidentifythemodelsimultaneouslywithcontrol process.
Ontheotherhand,Jang(1993)coinedthetermANFISwhichstandsforAdaptiveNetwork-basedFuzzyInference Systems, or semanticallyequivalently, Adaptive Neuro-Fuzzy Inference Systems.ANFIS is an intelligentregime comprisinganadaptivenetworkperformingthefunctionofaSugeno-typefuzzymodel(Jangetal.,1997;Cox,1992). Optimization algorithmsemployedthrough adaptive networksmake thesystemperformancesimilarto atargeted trainingdataset.ANFIScombinestheoptimizationstrengthofadaptivenetworkswiththeabilityoffuzzysystemsto handlevaguesituationsandprocessuncertaindata.SuchattributeenabledANFIStofindmanyimmediateengineering applicationsincluding,butnotlimitedto,decisionmaking,problemsolving,patternrecognition,nonlinearmapping, systemmodeling,andadaptivecontrol.
Inthispaper,bothANNandANFISareemployedtopresentanewadaptivePIDLoadFrequencyControlforpower systems.Theparametersof thePIDcontrolleraretunedoff-linebyusingGeneticAlgorithmtechniqueinorderto minimizetheintegralofsquareoferroroverawide-rangeofoperatingconditions.Severalloadchangescoveringthe rangefrom−0.5p.u.to+0.5p.u.areconsideredfortraining.ThedataobtainedfromGeneticAlgorithmareusedto trainbothANNandANFISthatcouldproducePIDcontrollerparametersforoptimalresponseatanyotherloadvalue withintheoperatingrange.TestingthedevelopedtechniquesshowthattheadaptivePIDLoadFrequencyControlcould preserveoptimalperformanceoverthewholeloadingrangewithsuperioritytoANFISintermsofseveralperformance measuressuchasIntegralofAbsoluteofErrors(IAE),IntegralofTimemultipliedAbsoluteofErrors(ITAE),and IntegralofSquareofErrors(ISE).
2. Problemformulation
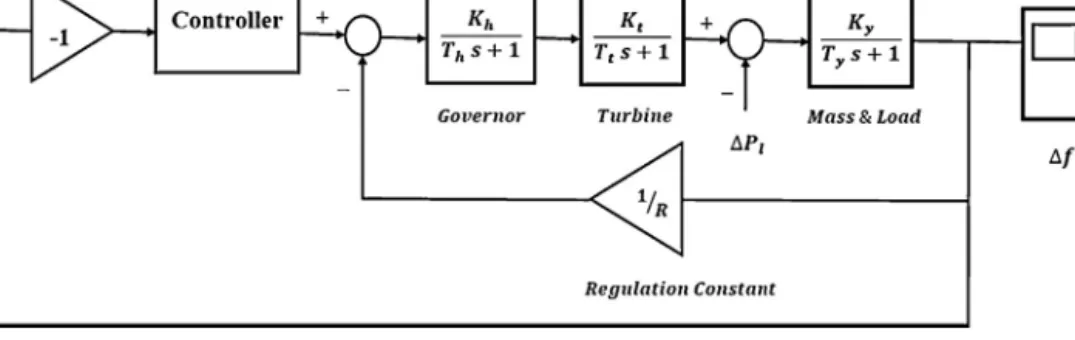
TheaimofLFCistomaintainarealpowerbalanceinthepowersystemthroughcontrollingthesystemfrequency. Whenevertherealpowerdemandchanges,afrequencychangeoccurs.Thisfrequencyerrorisamplified,mixedand changedtoacommandsignalwhichissenttoturbinegovernor.Thegovernorworkstorestorethebalancebetweenthe inputandoutputbychangingtheturbineoutput.ThismethodisalsoreferredasMegawattfrequencyorPower–frequency (P–f)Control(Saadat,2005).Theblockdiagramforsingleareanon-reheattypeisdepictedinFig.1.
Basically,electricpowersystemcomponentsarenon-linear;thereforealinearizationaroundanominaloperating pointisusuallyperformed togetalinearsystemmodel whichisused inthecontrollerdesignprocess.Thepower generatingunitsincludeturbines,generators,rotatingmassandload,hydraulicvalveactuatorandgovernors.
2.1. Turbines
Aturbineunitinpowersystemsisusedtotransformthenaturalenergy,suchastheenergyfromsteamorwater, intomechanicalpower(PT)thatissuppliedtothegenerator,ingeneral.Thenon-reheatturbinecanberepresented as(Kundur,1994):
GNR(s)= PT(s)
PV(s) = 1
Tts+1 (1)
whereTtisthetimedelaythatoccursbetweenswitchingthevalveandproducingtheturbinetorqueandPV,isthe valve/gatepositionchange.
2.2. Generators
Ageneratorunitinpowersystemsconvertsthemechanicalpowerreceivedfromtheturbineintoelectricalpower,but forLFC,afocuswillbeontherotorspeedoutput(frequencyofthepowersystem)ofthegeneratorinsteadoftheenergy transformation.In normalsteadystate,theturbinemechanicalpowerPT keepsbalancewiththeelectromechanical air-gappowerPGresultinginzeroaccelerationandaconstantspeedorfrequency.Anychangesinthesepowerswill upsettheabovebalance.ThegeneratorpowerincrementPGdependsonthechangesintheload,PL,fedfromthe generator.ThegeneratoralwaysadjustsitsoutputtomeetthedemandchangesPG.
2.3. Governors
Governorsaretheunitsthatareusedinpowersystemstosensethefrequencybiascausedbytheloadchangeand eliminateitbyvaryingtheinputsoftheturbines.Therealpower,inapowersystemiscontrolledbycontrollingthe drivingtorquesoftheindividualturbinesofthesystem.Forthesingleareanon-reheatthermalsystemconsideredin thisstudy,theconventionalPIDcontrollerisreplacedwithanadaptivePIDcontrollerwhosecontrollerparametersare tunedon-lineaccordingtoloadchangePLusingANNandANFIS.
3. Geneticalgorithms
Geneticalgorithms(GAs)arebiologicallyinspiredtechniquesusedforoptimization.Thesealgorithmsencodea potentialsolutiontoaspecificproblemonasimplechromosomelikedatastructureandapplyrecombinationoperators tothesestructuressoastopreservecriticalinformation(HauptandHaupt,1998).
TheGAbegins,likeanyotheroptimizationalgorithm,bydefiningtheoptimizationvariables,thefitnessfunction, andthefitness.Itendslikeotheroptimizationalgorithmstoo,bytestingforconvergence.
ThegeneralstepsimplementedwhenusingGAsare: 1. Generatearandominitialpopulation.
2. Createthenewpopulationbyapplyingtheselectionandreproductionoperatorstoselectpairsofstrings.Thenumber ofpairsisthepopulationsizedividedbytwo,sothepopulationsizewillremainconstantbetweengenerations. 3. Applythecrossoveroperatortothepairsofthestringsofthenewpopulation.
4. Applythemutationoperatortoeachstringinthenewpopulation. 5. Replacetheoldpopulationwiththenewlycreatedpopulation.
6. Copythebest-fittedindividualstothenewlycreatedpopulationtowarranteeevolution.
7. Ifthenumberofiterationsislessthanthemaximumgotosteptwo,elsestopORIfthefitnessofthebestresult doesnotgetbetterovercertainnumberofiteration,thenstop.
Fig.2.Schematicdiagramoftheconstructionoftheadoptedneuralnetworkmodel.
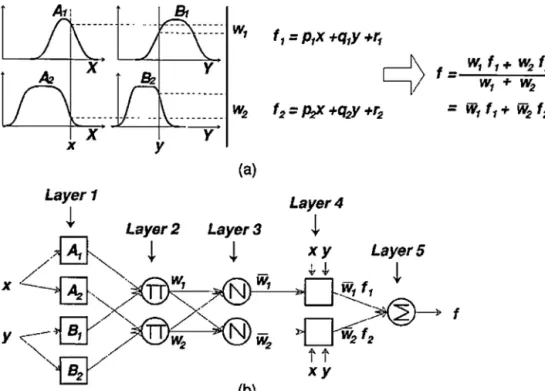
Fig.3.(a)Two-input,one-output,two-ruleSugenomodeland(b)equivalentANFISstructure.
3.1. ImplementationofGAsintheoptimizationproblem
TosolvetheoptimizationproblemusingGAs,allofthepossiblesolutionshavetobecodedinchromosomes,that isthethreecontrolparameters(KP,KIandKD).Seriesbinarycodingisusedinthispaper.Nextafitnessfunction (ISE)iscalculated,tocomparethechromosomeswhichhavetobedefined.Therefore,tocalculatethe fitnessofa chromosome,theoptimizationfunctionhastobecalculatedusingtheinformationinthechromosome.
4. Adaptivecontroltechniques
Adaptivecontrolistheattempttoredesignthecontrolleraccordingtoitsperformanceandtotuneitsparameters automatically.BothANNandANFIScanbeutilizedtofinetunethePIDcontrollerparametersonlinetobeanadaptive PIDcontroller.Inthefollowinganoverviewisgivenforbothofthetwotechniques.
4.1. ArtificialNeuralNetwork(ANN)
Artificial Neural Networks are considered as a relatively new informationprocessing technique. They canbe definedas“acomputingsystemmadeupofanumberofsimple,highlyinterconnectedprocessingelements,which
Table1
ControlparametersfromGAs,ANNandANFIS.
PL Algorithm GA ANN ANFIS KP KI KD KP KI KD KP KI KD −0.5 0.834 1.523 0.215 0.797 1.555 0.2 0.8342 1.5228 0.2148 −0.45 1.194 2.211 0.262 1.234 2.192 0.269 1.1944 2.2114 0.2619 −0.4 2.236 3.754 0.405 2.238 3.657 0.428 2.2355 3.7541 0.4054 −0.35 2.528 3.923 0.506 2.59 4.197 0.483 2.5281 3.9225 0.5057 −0.3 2.267 3.902 0.407 2.035 3.432 0.396 2.2665 3.9017 0.4074 −0.25 1.246 2.308 0.275 1.535 2.731 0.317 1.2461 2.3076 0.2745 −0.2 1.257 2.334 0.275 1.306 2.409 0.281 1.2569 2.3344 0.2745 −0.15 1.255 2.313 0.276 1.222 2.292 0.268 1.2549 2.3127 0.2757 −0.1 1.279 2.377 0.277 1.195 2.253 0.263 1.2792 2.3766 0.2767 −0.05 1.243 2.313 0.272 1.185 2.24 0.261 1.2426 2.3132 0.2717 0.05 4.084 3.946 7.379 4.098 3.937 7.372 4.0836 3.9455 7.3786 0.1 2.847 2.549 5.836 2.581 2.735 5.957 2.8466 2.5487 5.8362 0.15 2.365 3.405 5.931 2.564 2.839 6.108 2.3648 3.405 5.9314 0.2 2.974 4.075 8.433 3.181 4.366 8.16 2.9743 4.0754 8.4334 0.25 4.95 6.124 12.82 4.392 7.355 12.18 4.9502 6.1243 12.8249 0.3 4.9 8.827 13.18 4.693 8.099 13.18 4.9004 8.8272 13.183 0.35 4.19 8.867 13.26 4.721 8.169 13.27 4.1904 8.8674 13.2624 0.4 4.545 7.918 12.63 4.725 8.201 13.29 4.5451 7.9175 12.6266 0.45 4.856 8.483 13.46 4.738 8.505 13.43 4.856 8.4831 13.4606 0.5 4.823 10.86 14.54 4.84 10.85 14.54 4.8225 10.8598 14.5434 Abs(error) 3.1830 5.6320 2.0780 0.0055 0.0061 0.0224
processinformationbyitsdynamicstateresponse”.Aneuralnetworkconsistsofanumberofverysimpleandhighly interconnectedprocessorscalledneurons,whicharetheanalogsoftheneuronsinthebrain(Zhangetal.,1995).The neuronsareconnectedbyalargenumberofweightedlinks,overwhichsignalscanpass.Inthepresentapplication, threelayersneuralnetwork(havinganinputlayer,ahiddenlayerandanoutputlayer)havebeenused,togetherwitha tansigmoidalactivationfunctionandsupervisedtrainingviaaback-propagationtechnique,asshowninFig.2.
TheinputtoANNisthechangeofloadPL,andtheoutputisupdatedthreecontrolparametersKP,KIandKD.The wellknownenhancementofintroducingamomentumtermintheweightupdatingformulahasalsobeensuccessfully appliedtoreducetrainingtimesandtohelpinavoidingprematureconvergence.
Theweightsofneuralnetworkareadapteddependingontheerrorsignalcomingfromtheerrorbetweendesired andactualthreecontrolparameters.Tooptimize thenetwork,itserrorfunctionisformulatedinsuchawaythatis quadraticintermsoftheparameterstobeestimated.
TheerrorfunctionEisdefinedas:
E=1
2
(Kr(m)−KL(m))2 (2)
whereKraretheactualthreecontrollerscalculatedfromGAandKLarethedesiredtargetatanytimek,duringeach timeintervalfromm−1tom,theback-propagationalgorithmisusedtoupdatetheconnectiveweightswaccording totherelation
wij(n+1)=wij(n)−λ ∂E
∂wij(n)+μwij(n−1) (3)
whereλisthelearningrate,μisthemomentumfactor,andnindicatesthenumberoftrainingiterations.Athree-layer (input,hidden,andoutput)networkisusedfortheneuralcontroller.
(a) (b) (c) -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0 5 10 15
Load Change (P.U)
Kd GAs AN ANFIS -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 1 2 3 4 5 6 7 8 9 10 11
Load Change (P.U) Ki GAs AN ANFIS GAs AN ANFIS -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Kp
Load Change (P.U)
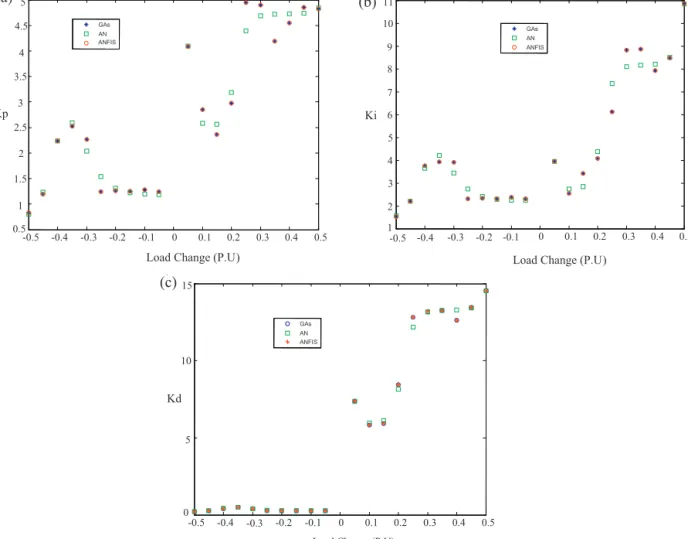
Fig.4.(a)ProportionalcontrollersfromGAs,ANNandANFIS.(b)IntegralcontrollersfromGAs,ANNandANFIS.(c)Derivativecontrollers fromGAs,ANNandANFIS.
4.2. AdaptiveNeuro-FuzzyInferenceSystems(ANFIS)
AnAdaptiveNeuro-FuzzyInferenceSystem(ANFIS)refers,ingeneral,toanadaptivenetworkwhichperformsthe functionofafuzzyinferencesystem.ThemostcommonlyusedfuzzysysteminANFISarchitecturesistheSugeno modelsinceitislesscomputationallyexhaustiveandmoretransparentthanothermodels.Aconsequentmembership function(MF)ofthe Sugenomodelcould beanyarbitrary parameterizedfunctionofthe crispinputs,most likely apolynomial.Zeroandfirstorderpolynomialsareused asconsequent MFinconstantandlinearSugenomodels, respectively.Inaddition,thedefuzzificationprocessinSugenofuzzymodelsisasimpleweightedaveragecalculation. ThefuzzyspaceisdividedviagridpartitioningaccordingtothenumberofantecedentMF,andeachfuzzyregionis coveredwithafuzzyrule.Ontheotherhand,eachfixedandadaptivenodeofthenetworkperformsonefunctionor sub-functionoftheSugenomodel,asshowninFig.3,suchthattheoverallperformanceofthenetworkisfunctionally thesameasthatofthefuzzymodel(PothiyaandTantaswadi,2006).
Theadaptivenetworkemploysanoptimizationalgorithmtomodifytheparametersofthefuzzyinferencesystem. Theadaptationprocessaimsatobtainingasetofparametersatwhichanerrormeasurebetweentheactualperformance ofthefuzzymodelandatargetedsetoftrainingdataisminimized.Classicaloptimizationtechniques,suchasback propagation,couldbeusedaswellashybridalgorithms(Pandaetal.,2009).ThetotalnumberofANFISmodifiable parametersisacrucialfactorofthecomputationaleffortrequiredbeforetheadaptationprocessiscompleted.Therefore, antecedentGaussianMF,whichisdefinedthroughtwoparametersonly,ismorepreferablethanotherformsofMF.
Table2
SystemresponseparameterswithGAs,ANNandANFIS.
PL Algorithm
GA ANN ANFIS
ISE IAE ITAE ISE IAE ITAE ISE IAE ITAE
−0.5 0.1267 0.3289 0.1595 0.1348 0.3313 0.1495 0.1267 0.3289 0.1595 −0.45 0.0625 0.2036 0.0760 0.0601 0.2059 0.0887 0.0625 0.2036 0.0760 −0.4 0.0200 0.1066 0.0381 0.0192 0.1098 0.0448 0.0200 0.1066 0.0381 −0.35 0.0117 0.0896 0.0395 0.0118 0.0836 0.0310 0.0117 0.0896 0.0394 −0.3 0.0110 0.0771 0.0279 0.0125 0.0875 0.0323 0.0110 0.0771 0.0277 −0.25 0.0179 0.1084 0.0400 0.0133 0.0918 0.0357 0.0179 0.1084 0.0400 −0.2 0.0113 0.0858 0.0316 0.0108 0.0833 0.0324 0.0114 0.0858 0.0316 −0.15 0.0064 0.0650 0.0256 0.0067 0.0656 0.0240 0.0064 0.0650 0.0255 −0.1 0.0028 0.0422 0.0161 0.0031 0.0446 0.0162 0.0028 0.0422 0.0161 −0.05 0.0007 0.0217 0.0084 0.0008 0.0225 0.0082 0.0007 0.0217 0.0084 0.05 0.0001 0.0224 0.0894 0.0001 0.0228 0.0928 0.0001 0.0223 0.0885 0.1 0.0006 0.0639 0.2349 0.0006 0.0670 0.2695 0.0006 0.0638 0.2331 0.15 0.0012 0.0945 0.3858 0.0014 0.1003 0.4132 0.0012 0.0945 0.3858 0.2 0.0016 0.1159 0.5855 0.0013 0.1006 0.4324 0.0015 0.1137 0.5488 0.25 0.0016 0.1418 1.1014 0.0010 0.0872 0.3971 0.0013 0.1110 0.6391 0.3 0.0022 0.1667 1.3530 0.0022 0.1615 1.2343 0.0019 0.1432 1.0021 0.35 0.0028 0.1882 1.5485 0.0021 0.1338 0.7535 0.0025 0.1709 1.2860 0.4 0.0024 0.1353 0.6192 0.0038 0.2214 1.8125 0.0024 0.1353 0.6190 0.45 0.0034 0.1854 1.2975 0.0048 0.2482 2.0589 0.0034 0.1858 1.3003 0.5 0.0064 0.2975 2.6284 0.0065 0.2987 2.6460 0.0056 0.2689 2.2130
ANFIScombines theadvantages offuzzy systemsandadaptive networksinonehybridintelligentparadigm. The flexibilityandsubjectivityoffuzzyinferencesystems,whenaddedtotheoptimizationstrengthofadaptivenetworks, giveANFISitsremarkablepowerofmodeling,learning,nonlinearmapping,andpatternrecognition(AfzalianandD. A,2000;JuangandLu,2005;SalemandAwadallah,2014).
5. Resultsanddiscussions
In order toverify the effectiveness of the proposedadaptive control techniques,a wide range of operation is considered. Practically,the loadchanges between−0.1p.u. and+0.1p.u. However,arange of operation between
−0.5p.u.and+0.5p.u.withastepof0.05p.u.(20points)isconsideredinthisstudytoensuretherobustnessofthe proposedadaptivecontroltechniques.
ThePIDcontrolparametersforeachloadareobtainedbyGAsinordertominimizeISE.Thesecontrolparameters are used totrain both ANN andANFIS withthese loadingconditions in ordertoget on-line control parameters adaptation.ThethreecontrolparametersobtainedfromGAsandthoseobtainedfromtrainingbothANNandANFIS areshowninTable1.Moreover,thesumofabsoluteoferrorsbetweeneachcontrolparameterandthecorresponding onesobtainedfrombothANNandANFISateachloadingconditionarealsodepicted.
Inthepresentwork,threelayersneuralnetwork(havinganinputlayerwithoneinputrepresentingtheloadchange, ahiddenlayerincluding20neuronsandanoutputlayerforthethreecontrol parameters)havebeenused,together withatansigmoidalactivationfunctionandsupervisedtrainingviaaback-propagationtechnique.Themeansquare error(MSE)ofthetrainingdataMSEstagnatedat0.258after7trainingepochs.ItshouldbementionedthatallNeural NetworksaredevelopedusingNFTOOLToolboxofMATLAB7.8.
Asingle-inputthree-outputANFISisdesignedwithGaussianantecedentmembershipfunction(MF),andfirst-order polynomialconsequentMF.WiththreeMFperinput,themeansquareerror(MSE)ofthetrainingdatadidnotstagnate evenafter1000trainingepochs.However,withfiveandsevenMFperinput,MSEstagnatedat0.000129and0.000103 after64and16trainingepochs,respectively.ItshouldbementionedthatallANFISofthepresentworkaredeveloped usingtheFuzzyLogicToolboxofMATLAB7.8.ItisworthnotingthatthreeANFISmodelsaredesignedforthethree controlparametersKP,KI,andKDduetoalimitationofANFIStoolboxtohaveonlyoneoutputperANFIS.
0 2 4 6 8 10 12 14 16 18 20 0 0.005 0.01 Time (Sec) Frequency Deviation (Hz) GAs ANN ANFIS
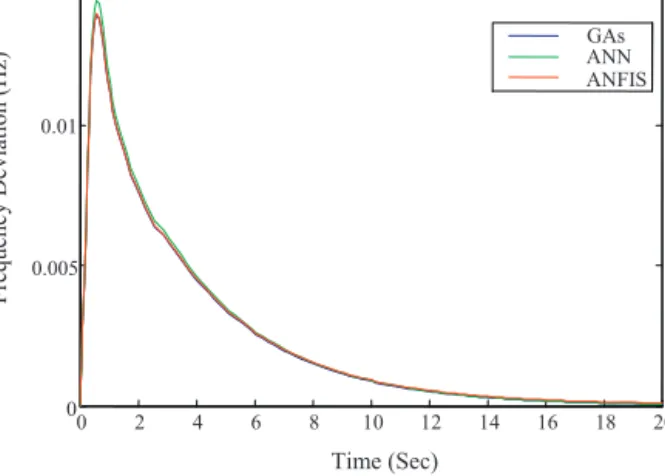
Fig.5.FrequencydeviationofthesystematPL−5%.
0 2 4 6 8 10 12 14 16 18 20 -6 -5 -4 -3 -2 -1 0 1 2 x 10 -3 Frequency Deviation (Hz) GAs ANN ANFIS Time (Sec)
Fig.6.FrequencydeviationofthesystematPL5%.
Fromtheseresults,itcanberevealedthatANFISgivesbetterperformancethanANN.Sumofabsoluteoferrors forthethreecontrolparametersofANFISislessthanthoseofANN,wheretheabsolutesumoferrorsforKPobtained usingANFISis0.0055whileitis3.1830usingANN.Similarly,absolutesumoferrorsforKIandKDare0.0061and 0.0224,respectively,usingANFISwhiletheyare5.6320and2.0780,respectively,usingANN.
ThethreecontrolparametersobtainedfromGAsandthoseobtainedfromtrainingANNandANFISareillustrated inFig.4.Inthisfigure,itisclearthatANFISgivesaccurateresultscomparingwithANNwhichhassomedeviations fromthereferencesvalues.
Theperformancemeasures(ISE,IAEandITAE)fortheseloadingcaseswithGAs,ANNandANFISareindicated inTable2.
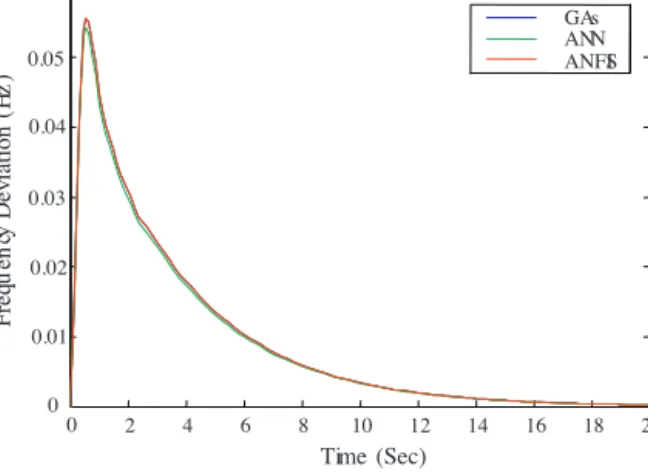
FromTable2,itisclearthatthesystemperformanceusingANFIS,ratherthanANN,isnearlyidenticaltoGAs.The frequencydeviationofthesystemwithcontrolparametersobtainedfromGAs,ANNandANFISatselectedoperating pointsPL±0.05and±0.15p.uaredepictedinFigs.5–8.
Totesttheeffectivenessofthesetrainedtwosystemsanothertwointermediatepoints,ratherthan20trainedpoints areselected,at±0.125p.u.ThecontrolparametersformANN,ANFISandGAsareshowninTable3.
The systemresponse withthesetwoloadingconditions (ISE,IAEandITAE)withGAs,ANN andANFISare indicatedinTable4.
0 2 4 6 8 10 12 14 16 18 20 0 0.01 0.02 0.03 0.04 0.05 0.06 Time (Sec) Freq u en cy Dev iation (H z ) GAs ANN ANFIS
Fig.7.FrequencydeviationofthesystematPL−20%.
-0.025 -0.02 -0.015 -0.01 -0.005 0 0.005 0.01 Time (Sec) Frequency Deviation (Hz) 20 18 16 14 12 10 8 6 4 2 0 GAs ANN ANFIS
Fig.8.FrequencydeviationofthesystematPL20%. Table3
ControlparametersfromGAs,ANNandANFIS.
PL Algorithm GA ANN ANFIS KP KI KD KP KI KD KP KI KD −0.125 1.2705 2.3710 0.2766 1.1945 2.3411 0.2030 1.266 2.191 0.2787 0.125 4.8942 6.4779 10.9896 2.483 2.424 5.881 2.9545 3.0786 6.4876 Table4
SystemresponseparameterswithGAs,ANNandANFIS.
PL Algorithm
GA ANN ANFIS
ISE IAE ITAE ISE IAE ITAE ISE IAE ITAE
−0.125 0.0044 0.0528 0.0189 0.0057 0.0688 0.0343 0.0045 0.0572 0.0251
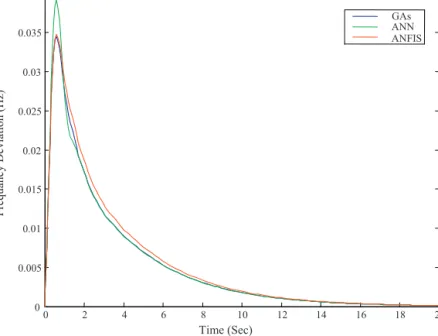
0 2 4 6 8 10 12 14 16 18 20 0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 Frequancy Deviation (Hz) GAs ANN ANFIS Time (Sec)
Fig.9.FrequencydeviationofthesystematPL−12.5%.
0 2 4 6 8 10 12 14 16 18 20 -0.02 -0.015 -0.01 -0.005 0 0.005 0.01 Frequency Deviation (Hz) GAs ANN ANFIS Time (Sec)
Fig.10.FrequencydeviationofthesystematPL12.5%.
6. Conclusion
ThispaperpresentsadesignmethodologybasedonANNandANFISforanadaptivePIDLoadFrequencyControl. Awide-rangeofloadchangeisconsideredatwhichGAisemployedtoobtaintheparametersofthePIDcontroller yieldingoptimalresponses.ThedataobtainedthroughGAareusedtotrainbothANNandANFISagent,whichgive theoptimalcontrollerparametersatanyloadpointwithinthespecifiedrange.BothANNandANFIStestingdenote notableeffectivenessinlearningandmappingthe systemcharacteristics.Testingbothof thedevelopedtechniques show thatthe adaptivePIDLoadFrequencyControlbasedANN andANFIScould preserveoptimalperformance overthewholeloadingrangewithsuperioritytoANFISintermsofseveralperformancemeasuressuchasIntegral ofAbsoluteofErrors(IAE),IntegralofTimemultipliedAbsoluteofErrors(ITAE),andIntegralofSquareofErrors (ISE).
7. Futurework
Authorsaregoingtochecktheproposedtuningmethodologyformuchmorecomplexsystemsuch astwoarea powersystemwithweaktieline.Moreover,authorsmayapplyothertechniquesinsteadoftuningaPIDcontroller.
References
Afzalian,A.,Linkens,D.A.,2000.Trainingofneurofuzzypowersystemstabilizersusinggeneticalgorithms.Int.J.Electr.PowerEnergySyst.22 (2),93–102.
Aldden,M.,Trinh,H.,1994.Load-frequencycontrolofinterconnectedpowersystemsviaconstrainedfeedbackcontrolschemes.Comp.Electr. Eng.20(1),71–88.
Cox,E.,1992.Fuzzyfundamentals.IEEESpectr.29(10),58–61.
Elgerd,O.I.,Fosha,C.E.,1970.Optimalmegawatt-frequencycontrolofmulti-areaelectricalenergysystems.IEEETrans.PASPAS89(April(4)), 556–563.
Haupt,R.,Haupt,S.E.,1998.PracticalGeneticAlgorithms.JohnWileyandSons,SanFrancisco,CA,USA.
Hsu,Y.,Cheng,C.,1991.Loadfrequencycontrolusingfuzzylogic.In:Int.Conf.onHighTechnologyinthePowerIndustry,pp.32–38.
Jang,J.-S.,1993.ANFIS:adaptive-network-basedfuzzyinferencesystem.IEEETrans.Syst.ManCybern.23(3),665–685.
Jang,J.-S.,Sun,C.-T.,Mizutani,E.,1997.Neuro-FuzzyandSoftComputing–AComputationalApproachtoLearningandMachineIntelligence. Prentice-Hall.
Juang,C.-F.,Lu,C.-F.,2002.PowerSystemLoadFrequencyControlWithFuzzyGainSchedulingDesignedbyNewGeneticAlgorithms.IEEE, 0-7803-7280-8/02/$10.00.
Juang,C.-F.,Lu,C.-F.,2005.Powersystemloadfrequencycontrolbygeneticfuzzygainschedulingcontroller.J.Chin.Inst.Eng.28(6),1013–1018.
Kundur,P.,1994.PowerSystemStabilityandControl.McGraw-Hill,NewYork.
Nanda,J.,Kaul,B.L.,1978.Automaticgenerationcontrolofaninterconnectedpowersystem.IEEProc.125(May(5)),385–390.
Panda,G.,Panda,S.,Ardil,C.,2009.Hybridneurofuzzyapproachforautomaticgenerationcontroloftwo–areainterconnectedpowersystem. Int.J.Comp.Intell.5(1),80–84.
Pothiya,S.,Tantaswadi,P.,2006.Designofoptimalfuzzylogicbasedpicontrollerusingmultipletabusearchalgorithmforloadfrequencycontrol. Int.J.ControlAutom.Syst.4(2),155–164.
Saadat,H.,2005.PowerSystemAnalysis.Mcgraw-HillInternational.
Sabahi,K.,Nekoui,M.A.,Teshnehlab,M.,Aliyari,M.,Mansouri,M.,2007.Loadfrequencycontrolininterconnectedpowersystemusingmodified dynamicneuralnetworks.In:2007MediterraneanConferenceonControlandAutomation,Athens,Greece,July27–29.
Salem,F.,Awadallah,M.,2014.Parametersestimationofphotovoltaicmodules:comparisonofANNandANFIS.Int.J.Ind.Electron.Drives1(2), 121–129.
Talaq,J.,Al-Basri,F.,1999.Adaptivefuzzygainschedulingforloadfrequencycontrol.IEEETrans.PowerSyst.14(February(1)).