2017 2nd International Conference on Wireless Communication and Network Engineering (WCNE 2017) ISBN: 978-1-60595-531-5
Compressive Sensing Multi-User Detection for MC-CDMA System in
Machine to Machine Communication
Xu-ping ZHAI
*, Nan ZHANG
and Lei GONG
Key Laboratory of Specialty Fiber Optics and Optical Access Networks, Joint International Research Laboratory of Specialty Fiber Optics and Advanced Communication, Shanghai Institute for
Advanced Communication and Data Science, Shanghai University, Shanghai, China *Corresponding author
Keywords: Machine to Machine Communication (M2M), Multi-user detection, Compressive
sensing, Cross validation (CV).
Abstract. Machine to Machine (M2M) Communication is one of the core technologies of 5G in the future. To relieve control signal overhead lead by massive access during M2M communication, we use greedy algorithm from the field of CS to perform joint Multi-User (MUD) detection of activity and data by taking advantage of sporadic nature of certain M2M applications. The simulation results show that it is effective in recovering sparse input signals as well as gaining higher spectral efficiency. We also show that combining cross validation (CV) with the greedy algorithm is reliable in identifying the sparsity level of input vector which makes CS-MUD more practical.
Introduction
Machine to Machine (M2M) Communication is one of the core technologies of 5G in the future. It is predicted that M2M will come up to 26 billion devices by 2020 [1]. As a consequence, large scale of the terminal put forward a challenge on how to deal with massive access in the physical layer. Furthermore, future wireless systems also have to meet different new communication requirements in some M2M applications such as low latency for smart meters and highly reliable communication for medical devices [2]. To address the challenges mentioned above, we focus on reducing control signal overhead which not only decreases the complexity of system but also reduces traffic latency and increases energy efficiency.
The Theory about CS
Compressive sensing (CS) theory was firstly introduced in [8] and [9] which shows that a sparse signal can be recovered with high probability. In this paper, we utilize that the M2M communication scenario meets the conditions of CS application, and then use the CS reconstruction algorithm to realize the multi user detection. The basic CS reconstruction problem is
0 min
. . .
N
x R
CS s t
x
y
ψφ
x n A x n∈
= + = +
(1)
Where ⋅0 denotes the l0 -pseudo norm. It needs to reconstruct x either accurately or
approximately given y and CS M N
A C ×
∈ using M Nmeasurements. It seems like a severely
ill-posed inverse problem, however, the sparsity of x makes reconstruction using M N
measurements possible. There are three main reconstruction algorithms. A thorough overview of reconstruction algorithms won’t be introduced here. In this paper we will adopt Orthogonal Matching Pursuit (OMP) algorithm known as Greedy iterative algorithm which is less complex. OMP algorithm is commonly used well and suited for our scenario. In order to make it more practical, we will modify the OMP which will be detailed later.
CS-MUD Method for M2M
Machine-to-Machine Scenario
In this paper, we consider a M2M scenario where a set of Ksensor nodes communicate with a
central aggregation node or base station. The sensor nodes are active occasionally which means sporadic communication. To model sensor nodes activity, we assume that each node has quite low and identical activity probabilitypa1which means the majority of nodes are silent.
Multicarrier-CS-MUD system model
In order to simplify the system, we assume all nodes experiences flat fading which means we allocate the subcarriers within the coherence bandwidth. We assume a nodek, 1≤k≤Kis active
with probabilitypaand transmits symbols from the modulation alphabetA. Inactive nodes won’t
transmit any data. Then, we spread the modulated symbols by spreading sequence Nc
k
s ∈C . Finally, we map all chips toNssubcarriers i.e.Nc=Ns. The transmission flow is summarized in Figure 1:
Figure 1. Transmission flow.
The received signal can be described as:
1
.
K
k k k k
y H S x
=
=
∑
+ Ν (2)Where xk∈Ais symbol transmitted by nodekat some time instance. To create detection model,
we assume inactive nodes to transmit zero symbol i.e.xk =0 which actually don’t transmit any data.Ais modulation alphabet, such as Phase Shift Keying (PSK) or Quadrature Amplitude
Modulation (QAM). We augment setAto be
0 0
A = A∪ which contains elements of sourcexi.
1 s
N
k
S C ×
∈ is spreading code of node k which then mapped to frequency resources. The matrix
{ }
Ns Nsk k
H diag h C ×
= ∈ in which the vector k k,1, k,2, , k N, s
h =h h h represents flat fading coefficients
known the channel state information. 1
(
2)
~ 0 ,
s
N
N
C × N σ
Ν ∈ is the additive white Gaussian noise
(AWGN). The system model can be written in vector form y=AX+ Νwhere K1
X C ×
∈ contains the
symbols that allKnodes transmit at some time instance. Since the majority symbols in X are zero
consideringpa 1, the multi-user symbol vectorX is sparse. In other words, central aggregation node or base station are required to recover sparse multi-user signal by received signal yand knownAwhich is a typical CS reconstruction problem. At this point, MUD of activity and data
comes down to CS reconstruction problem. In addition, CS theory enables us to reliably detectK unknowns with Ns ≤K received signals which makes overloaded system possible
by 1
s K
N
β = . It is a good thing for M2M communication to know that CS-MUD under multicarrier
system can improve spectral efficiency.
Detection Scheme
Our detection scheme is based on OMP algorithm[10]which is commonly used well and suited for our scenario. However, most greedy algorithms including OMP algorithm require prior knowledge such as sparsity or noise level to properly stop the iteration[4][12], which however could not be satisfied in most practical cases. Especially in our case, we have no idea about the number of active M2M nodes. Without such information the termination of the algorithm may be too early or too late. In the former case, the OMP won’t reconstruct the signal completely (underfitting), while in the latter the OMP may treat some noise as signal (overfitting) which both greatly deteriorate the reconstruction quality. Therefore, we should modify the OMP to be a more practical algorithm.
As a substitute to prior knowledge, cross validation (CV) was proposed to serve as iteration stopping criterion of greedy algorithms by Boufounos, Duarte, and Baraniuk in[12], where the general framework of CS-CV modification is founded. In a CS-CV modified algorithm, we divide the received vector y into two parts including a training vector y( )t and a validation vector y( )v .It
can be described as:
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ).
t t t t
v v v v
y A X N
y A X N
= +
= +
(3)
In this algorithm, every iteration can be viewed as two separate parts: reconstructing the signal by OMP and evaluating the recovered signal by cross validation technique which is utilized to properly terminate the iteration before the recovery starts to overfit the noise. However, Authors in [12]
assume that total measurements ( ) ( )
t v
y + y
is fixed which means a tradeoff between measurements for reconstruction and measurements for CV. On the one hand, increasing ( )v
y can gain optimal stopping iteration which in turn improve the performance. On the other hand, increasing y( )v means
decreasing y( )t which may affect reconstruction performance even if the optimal stopping iteration
is known.
In order to improve the performance of OMP-CV further, we propose our two-stepped scheme. Firstly, we just use OMP-CV to estimate the sparsity, then we still use all measurements to reconstruct the signal with above estimated sparsity to terminate the iteration. We consider different nodes numbersKwith its own different sparsityp. Figure 2 shows that the validation error CV
residual doesn’t decrease monotonically and reaches a minimum value if iteration number equals the sparsity level so that it is reasonable to estimate the sparsity by CV technology in our M2M scenario. The basic idea is that using the training vector y( )t , a set of possible estimates
(
x xˆ ˆ1, 2,,xˆn)
is generated. For each estimate ˆxi, the validation vector( )v
compute the estimation error ( ) ( ) 2 ˆ
v v
p y A xp
ε = − .The algorithm is finished when εp reaches the
[image:4.612.318.502.129.275.2]minimum value. Then we choose the corresponding iteration count as the estimated sparsity ( ˆp=arg minεp). Finally we use all measurementsyto reconstruct the signal.
Figure 2. Error of iteration number (Ns=32,K=32,64,96,128).
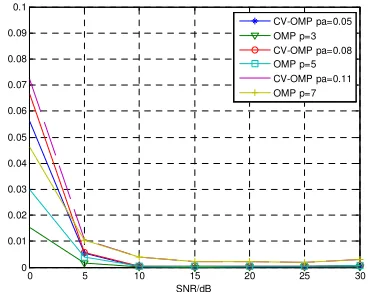
Figure 3. OMP performance under known sparsity and unknown sparsity.
Performance Analysis
To assess the performance of joint activity and data detection, we consider Net-Symbol-Error(NSE) about active users containing both activity detection errors and data detection error and Gross- Symbol-Error(GSE) about all users i.e. entire vectorX . NSE is more important than GSE. The
reason is that if we detect inactive users to be active users, it can be fixed by higher layer error handling applications such as check codes. However, wrong detection of active users means data loss which is more severe.
Simulation Setup
Based on the MATLAB simulation platform We consider a system contains Ns =32 orthogonal subcarriers. For each user, Walsh Code with Nc =32chips are used as spreading factor. We assume 16QAM as modulation scheme from which the nonzero elements in K1
X C ×
∈ are selected.
Simulation Results
The first simulation examines the efficiency of CV operation where for each point at different SNR, we first perform 50 trials for the CV operation and use the average value of iteration number as an estimated sparsityp. Next we perform 1, 000 trials for each different SNR of the OMP algorithm
with above estimated sparsity pto terminate the iteration. Figure 3 shows the performance of OMP
under different conditions. One is performed under perfect knowledge of sparsity p=3,5,7which serves as a best stopping criteria. The other is performed under unknown sparsity i.e.,pa=0.05,0.08,0.11 and adopt CV to estimate sparsity. We consider a small overloaded system by set user number K=64. If two results overlap, it means correct sparsity estimation. The results shows that CV can reliably estimate sparsity for high SNR even in overloaded system
2
β = without mention in full loaded system. However, CV estimation performs badly for low SNR.
In the low SNR range, OMP may treat some of the noise vector as the transmitting signal during CV operation which leads to overfitting. In that case, the estimated sparsity is higher than real sparsity which deteriorate the latter reconstruction algorithm and GSE performance clearly shows that.
For comparison purposes, we include Least Squares(LS) estimation with known activity information i.e. the detector knows the support ofX . We call it “oracle LS”. Additionally, the oracle
LS serves as a lower bound, since OMP can never be better than oracle LS because in essence OMP is a LS estimation without known correct position of support. In order to show the performance of
0 5 10 15 20 25 30
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
SNR/dB
G
S
E
CV-OMP pa=0.05 OMP p=3 CV-OMP pa=0.08 OMP p=5 CV-OMP pa=0.11 OMP p=7
0 2 4 6 8 10 12
100
number of iteration
e
rr
o
rs
CV
residual K=32,p=2 CV
[image:4.612.103.291.132.278.2]OMP under MC-CDMA system for larger SNR range, we assume perfect knowledge of sparsity given sparsity estimation is not reliable in low SNR range. It is worth mentioning that receiver can count on CV estimation to estimate sparsity in higher SNR range.
0 2 4 6 8 10 12 14 16 18 20
0 0.05 0.1 0.15 0.2 0.25
SNR/dB
N
S
E
[image:5.612.210.395.116.262.2]OMP p=3 Oracle LS p=3 OMP p=4 Oracle LS p=4 OMP p=5 Oracle LS p=5
Figure 4. NSE of OMP and Oralce LS with β=2.
Figure 4 shows the performance for overloaded system, β =2 nodes per subcarrier by setting nodes number K=64. The figure shows that the OMP performs much better with increasing SNR. The NSE is zero for high SNR which means exactly correct signal detection of active users. Note that the performance decreases as sparsity rises. Inter-correlation of spreading sequences is responsible for this. Because the system is overloaded, the spreading sequences in A are non-orthogonal. In that case, the Inter-correlation will lead to less reliable activity detection. In other words, the Inter-correlation of non-orthogonal spreading sequences leads to wrong detection of support set of X in OMP algorithm.
0 2 4 6 8 10 12 14 16 18 20
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
SNR/dB
N
S
E
K=32 β=1 K=64 β=2 K=96 β=3 K=128 β=4
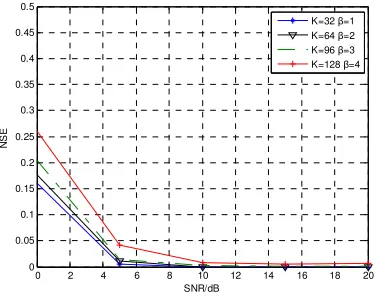
Figure 5. Detection performance of active users under different system load.
Finally, we validate that the CS-MUD under MC-CDMA system gains a high spectral efficiency for M2M communication. We overload the system by assign more users toNs=32subcarriers where the value of K is set as 32,64,96,128 and pa=0.05. Figure 5 shows NSE of OMP for different system load. The figure shows that we can gain higher spectral efficiency up to β =4 at the cost of small performance losses.
Summary
[image:5.612.208.396.404.550.2]scenarios, we also combine OMP with CV technology which can reliably estimate the number of active users known as sparsity. In addition, we still validate that CS-MUD enable MC-CDMA system to allocate more users to the subcarriers which means higher spectral efficiency.
Acknowledgement
This work was supported by the National Natural Science Foundation of China [grant no. 61171085 and 61401266].
References
[1] Rivera J, van der Meulen R. Gartner says the internet of things installed base will grow to 26 billion units by 2020[J]. Stamford, Conn., December, 2013, 12.
[2] Ghavimi F, Chen H H. M2M communications in 3GPP LTE/LTE-A networks: architectures, service requirements, challenges, and applications[J]. IEEE Communications Surveys & Tutorials, 2015, 17(2): 525-549.
[3] Zhu H, Giannakis G B. Exploiting sparse user activity in multiuser detection[J]. IEEE Transactions on Communications, 2011, 59(2): 454-465.
[4] Schepker H F, Dekorsy A. Sparse Multi-User Detection for CDMA transmission using greedy algorithms[C]//Wireless Communication Systems (ISWCS), 2011 8th International Symposium on. IEEE, 2011: 291-295.
[5] Schepker H F, Bockelmann C, Dekorsy A. Exploiting sparsity in channel and data estimation for sporadic multi-user communication[C]//Wireless Communication Systems (ISWCS 2013), Proceedings of the Tenth International Symposium on. VDE, 2013: 1-5.
[6] Schepker H F, Bockelmann C, Dekorsy A. Coping with CDMA asynchronicity in compressive sensing multi-user detection[C]//Vehicular Technology Conference (VTC Spring), 2013 IEEE 77th. IEEE, 2013: 1-5.
[7] Dekorsy A, Kammeyer K D. A new OFDM‐CDMA Uplink Concept with Mary Orthogonal Modulation[J]. European transactions on telecommunications, 1999, 10(4): 377-389.
[8] D. Donoho, “Compressed sensing,” IEEE Trans. Inform. Theory, vol. 52, no. 4, pp. 1289–1306, April 2006.
[9] E. Candes, J. Romberg, and T. Tao, “Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information,” IEEE Trans. Inform. Theory, vol. 52, no. 2, pp. 489–509, Feb. 2006.
[10] Tropp J A, Gilbert A C. Signal recovery from random measurements via orthogonal matching pursuit[J]. IEEE Transactions on information theory, 2007, 53(12): 4655-4666.
[11] Wang J. Support recovery with orthogonal matching pursuit in the presence of noise[J]. IEEE Transactions on Signal Processing, 2015, 63(21): 5868-5877.