© 2017, IRJET | Impact Factor value: 5.181 | ISO 9001:2008 Certified Journal | Page 1931
Dynamic Vehicle Tracking and Detection For
Self Driving Using FCM Algorithm
Deepthi.T
1,Preethi.M
2,Sharmily.R
3,Venkata Lakshmi.S
44S.Venkata Lakshmi, Professor, Dept. of Computer Science & Engineering, Panimalar Institute Of Technology, Chennai, Tamilnadu, India
---****---Abstract-This paper describes about vehicle tracking and detection for un-manned vehicle using FCM algorithm. In order to achieve this Artificial Intelligence is used to recognize and track a path which an intelligent car can follow. The drawback of the using Beam-Model based algorithm is that they cannot detect and track dynamic vehicle that are occluded by other objects and cannot move in a proper direction when an obstacle occurs in the middle. To solve this problem a novel detection and tracking algorithm for the ALV is proposed. Frame rate up-conversion increases temporal sampling rate in progressive video. MPEM enables automatic detection of objects and allows non-grid motion. Second order feature extraction is done using Hough Transform. Pose search and detection using deep network with lane space estimation is done to provide an improvised result.
Key Words- Un-manned Land Vehicle(ALV), Vehicle Detection And Tracking, Artificial Intelligence, Fuzzy Clustering Algorithm, Hough transform .
1. Introduction
For as long as hundred years, advancement inside the car division has made more secure, cleaner, and more reasonable vehicles, however advance has been incremental. The business now seems near considerable change, induced by un-manned, or self-driving, the expression "un-manned auto" was characterized as follows. An auto with the capacity to drive itself freely from human control. In many cases this component can be physically turned on or off by the client of the vehicle. This innovation offers the likelihood of noteworthy advantages to social welfare-sparing lives; lessening crashes, blockage, fuel utilization, and contamination; expanding
versatility for the impaired; and at last enhancing land utilize. As the urban communities develop and the populace builds, more activity is produced which has numerous antagonistic impacts. The requirement for a more productive, adjusted and more secure transportation framework is self-evident. This need can be best met by the execution of un-manned transportation frameworks. Later on, robotized frameworks will stay away from mishaps and lessen blockage. The future vehicles will be equipped for deciding the best course and caution each other about the conditions ahead. The way people in general sees un-manned autos will straightforwardly influence the way they will be acquainted with the market and how rapidly we'll be seeing them in the city. People in general's readiness to acknowledge this innovation will decide how auto producers create and showcase them. Basically, if people in general is not tolerating of specific parts of the innovation, auto producers won't build up these perspectives.
2. Related Works
Pixel-© 2017, IRJET | Impact Factor value: 5.181 | ISO 9001:2008 Certified Journal | Page 1932 Based Change Detection technique is used. Sparse
Generative model (SGM) is used to track different objects of different speed and shapes[2]. Bayesian Occupancy Filter (BOF) system to decrease preparing time and enhance the aftereffects of ensuing grouping and following calculation, in light of BOF[3]. A changed SMC-BOF technique to delineate anticipates inhabitance frameworks. The first SMC-BOF has been generally utilized as a part of the inhabitance lattice mapping since it has bring down computational expenses than the BOF technique[4]. The inhabitance framework state mapping is a key procedure in mechanical autonomy and self-governing driving frameworks. It partitions the earth into network cells that contain data states.A changed SMC-BOF technique to delineate anticipates inhabitance frameworks. The first SMC-BOF has been generally utilized as a part of the inhabitance lattice mapping since it has bring down computational expenses than the BOF technique [5]. The Monte Carlo approach performs arrangement of progressive refinements combined with tempering. Broad observational assessment beats earlier methodologies. General pertinence of the approach on five regular strong items, which are unbendingly settled amid the tests.[6]. A robust approach by means of collaborative observation demonstrates Pattern Classification Strategy and Pixel-Based Change Detection technique is used. Sparse Generative model (SGM) is used to track different objects of different speed and shapes. The update scheme considers both the pre-stored images in database and the recent observations and the tracking accuracy is based on the update scheme observations [7].The estimation of the Bayesian back for the full six degrees of flexibility of restriction issues computationally restrictive. Monte Carlo approach performs arrangement of progressive refinements combined with tempering. A scientific estimation model is processed effectively at the run time for any question spoke to as a polygonal work. Broad observational assessment beats earlier
methodologies. General pertinence of the approach on five regular strong items, which are unbendingly settled amid the tests.[8].
3. Proposed Work
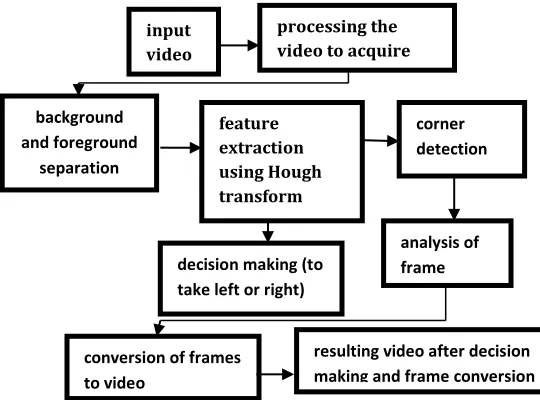
In the proposed work, the un-manned car is made to take a right path when an obstacle involves by calculating the distance of right and left direction in a column wise manner.The video is converted into frame and feature is extracted using Hough transform and the decision is made.
3.1. Acquiring video through frame pipeline system
In Video Acquisition utilizing Frame Pipeline framework the edge rate up-transformation increment the fleeting inspecting rate in dynamic video. Cases of edge rate transformation incorporate change from a digitized movie recorded with a worldly rate of 24 casings/sec to NTSC arrange, which requires 60 fields/sec. The outcome is a cIn Video Acquisition utilizing Frame Pipeline framework the edge rate up-change increment the worldly testing rate in dynamic video. Cases of edge rate transformation incorporate change from a digitized movie recorded with a transient rate of 24 edges/sec to NTSC design, which requires 60 fields/sec. The outcome is a clearer picture particularly amid a moderate movement video.
3.2. Road Object segmentation using Motion Pixel Expectation Maximization (MPEM)
© 2017, IRJET | Impact Factor value: 5.181 | ISO 9001:2008 Certified Journal | Page 1933 fundamental suspicion hidden these calculations is
that exclusive translational movement can be made up for Rotational movement and zooming can't be evaluated by utilizing square based pursuit calculations. It is known to be the most significant and computationally concentrated process in the video pressure calculation.
3.3. Hough transforms feature extraction for lane detection
Highlight Extraction – Second request include extraction, Hough Transform the preparation organize, each commented on part is scaled and pivoted to a sanctioned posture preceding learning, the preparation set by including little scale, revolution, and counterbalance changes to the first pictures is included. The negative element vectors are got by consistently inspecting them from the picture areas outside of the question jumping box. After the underlying preparation, the classifiers are re-prepared with another negative preparing set that has been expanded with false positives created by the underlying classifier. The second order transformation like Autocorrelation, Contrast, Correlation, Cluster Prominence, Cluster Shade, Dissimilarity Vitality, Entropy, Homogeneity, Maximum likelihood , Sum of squares, Sum normal, Entirety fluctuation, Sum entropy, Difference change, Difference entropy information are calculated.
3.4. Pose search and detection using deep network with lane space estimation
Posture pursuit and recognition utilizing profound system for driverless self-driving direction with path space appraises the foundation outline has by taking normal of the considerable number of pixels. Outline number has been chosen from which following of any protest must be begun. From chose outline question be followed has been chosen by repositioning the veil. For chose question its centroid position has been
[image:3.612.320.590.137.337.2]discovered and from centroid data all the condition of time and estimation.
Figure 3.1 Block diagram
4. Experimental results
Figure4.1-Acquiring input video
Figure 4.2-Converting into binary pattern to calculate local feature
input video
processing the video to acquire frame
background and foreground
separation
feature extraction using Hough transform
corner detection
decision making (to take left or right)
analysis of frame
conversion of frames to video
© 2017, IRJET | Impact Factor value: 5.181 | ISO 9001:2008 Certified Journal | Page 1934 Figure 4.3-Detection of any obstacle present
[image:4.612.37.247.524.668.2]Figure 4.4-Binary Segmented Image
Figure 4.5-Lane Detection whether to take left or right
Figure 4.6-Converting the frame processed into final video
5. Conclusion
A likelihood field-based vehicle measurement model, combinedwith our newly modified FCM video segmentation algorithm and Hough transform feature extraction, is proposed to estimate the poses of the vehicles where it can naturally handle the situation where the dynamic vehicles are fully occluded by other objects in the x y plane.
References
[1] T. Gindele, S. Brechtel, J. Schroder, and R. Dillmann, “Bayesian occupancy grid filter for dynamic environments using prior map knowledge”in Proc. IEEE IV Symp., 2009, pp. 669– 676.
[2] R. Danescu, F. Oniga, and S. Nedevschi, “Modeling and tracking the driving environment with a particle based occupancy grid,” IEEE Trans. Intell. Transp. Syst., vol. 12, no. 4, pp. 1331–1342, Dec. 2011.
[3] M. Schutz, N. Appenrodt, J. Dickmann, and K. Dietmayer, “Occupancy grid map-based extended object tracking,” in Proc. IEEE IV Symp., 2014,pp. 1205–1210.
[4] J. Leonard et al., “A perception-driven un- maned urban vehicle,”mhJ. Field Robot., vol. 25, no. 10, pp. 727–774, Oct. 2008.
[5]Y. Yang, G. Yan, H. Zhu, M. Y. Fu, and M. L. Wang, “Moving object detection under dynamic background in 3D range data,” in Proc. IEEE IV Symp., 2014, pp. 394–399.
[6] M. Himmelsbach and H. J. Wuensche,”Tracking and classification of ar-bitrary objects with bottom-up/top-down detection,” in Proc. IEEE Intell.Veh. Symp., 2012, pp. 577–582.
© 2017, IRJET | Impact Factor value: 5.181 | ISO 9001:2008 Certified Journal | Page 1935 lidar,” Int. J. Robot. Res., vol. 34, no. 7,pp. 1039–1063,
Jun. 2015.
[8] D. Held, J. Levinson, and S. Thrun, “Precision tracking with sparse 3D and dense color 2D data,” in Proc. IEEE ICRA, 2013, pp. 1138–1145.
[9]D. D. Morris, R. Hoffman, and P. Haley, “A view-dependent adaptive matched filter for ladar-based vehicle tracking,” in Proc. 14th Int. Conf.Robot. Appl., 2009, pp. 1–9.
[10] T. D. Vu and O. Aycard, “Laser-based detection and tracking moving objects using data-driving Markov chain Monte Carlo,” in Proc. IEEE ICRA, 2009, pp. 3800–3806.
[11] K. Granstrom, S. Reuter, D. Meissner, and A. Scheel, “A multiple model PHD approach to tracking of cars under an assumed rectangular shape,”in Proc. 17th Int. Conf. Inf. Fusion, 2014, pp. 1–8.
[12] F. Moosmann, O. Pink, and C. Stiller, “Segmentation of 3D lidar data in non-flat urban environments using a local convexity criterion,” in Proc.IEEEIntell. Veh.Symp., 2009, pp. 215–220.
[13] S. Thrun, W. Burgard, and D. Fox, Probabilistics Robotics. Cambridge,MA, USA: MIT Press, 2005.
[14] Z. Liu, D. Liu, and T. Chen, “Vehicle detection and tracking with 2D laser range finders,” in Proc. 6th Int. CISP, 2013, pp. 1006–1013.