R E S E A R C H
Open Access
Weak and strong convergence of hybrid
subgradient method for pseudomonotone
equilibrium problem and multivalued
nonexpansive mappings
Dao-Jun Wen
**Correspondence: [email protected] College of Mathematics and Statistics, Chongqing Technology and Business University, Chongqing, 400067, China
Abstract
In this paper, we introduce a hybrid subgradient method for finding a common element of the set of solutions of a class of pseudomonotone equilibrium problems and the set of fixed points of a finite family of multivalued nonexpansive mappings in Hilbert space. The proposed method involves only one projection rather than two as in the existing extragradient method and the inexact subgradient method for an equilibrium problem. We establish some weak and strong convergence theorems of the sequences generated by our iterative method under some suitable conditions. Moreover, a numerical example is given to illustrate our algorithm and our results.
MSC: 47H05; 47H09; 47H10
Keywords: pseudomonotone equilibrium problem; multivalued nonexpansive mapping; hybrid subgradient method; fixed point; weak and strong convergence
1 Introduction
LetH be a real Hilbert space with inner product ·,· and norm · , respectively. Let
K be a nonempty closed convex subset ofH. LetF:K×K→Rbe a bifunction, where Rdenotes the set of real numbers. We consider the following equilibrium problem: Find
x∈Ksuch that
F(x,y)≥, ∀y∈K. (.)
The set of solution of equilibrium problem is denoted byEP(F,K). It is well known that some important problems such as convex programs, variational inequalities, fixed point problems, minimax problems, and Nash equilibrium problem in noncooperative games and others can be reduced to finding a solution of the equilibrium problem (.); see [–] and the references therein.
Recall that a mappingT:K→Kis said to be nonexpansive if
Tx–Ty ≤ x–y, ∀x,y∈K.
A subsetK⊂His called proximal if for eachx∈H, there exists an elementy∈Ksuch that
dist(x,K) :=x–y=infx–z:z∈K.
We denote byB(K),C(K), andP(K) the collection of all nonempty closed bounded subsets, nonempty compact subsets and nonempty proximal bounded subsets ofK, respectively. The Hausdorff metricHonB(H) is defined by
H(K,K) :=max
sup
x∈K
dist(x,K),sup
y∈K
dist(y,K)
, ∀K,K∈B(H).
LetT :H→Hbe a multivalued mapping, of which the set of fixed points is denoted byFix(T),i.e.,Fix(T) :={x∈Tx:x∈K}. A multivalued mappingT:K→B(K) is said to be nonexpansive if
H(Tx,Ty)≤ x–y, ∀x,y∈K. (.)
Tis said to be quasi-nonexpansive if, for allp∈Fix(T),
H(Tx,p)≤ x–p, ∀x∈K. (.)
Recently, the problem of finding a common element of the set of solutions of equilib-rium problems and the set of fixed points of nonlinear mappings has become an attractive subject, and various methods have been extensively investigated by many authors. It is worth mentioning that almost all the existing algorithms for this problem are based on the proximal point method applied to the equilibrium problem combining with a Mann iteration to fixed point problems of nonexpansive mappings, of which the convergence analysis has been considered if the bifunctionFis monotone. This is because the proximal point method is not valid when the underlying operatorFis pseudomonotone. Another basic idea for solving equilibrium problems is the projection method. However, Facchinei and Pang [] show that the projection method is not convergent for monotone inequal-ity, which is a special case of monotone equilibrium problems. In order to obtain con-vergence of the projection method for equilibrium problems, Tranet al.[] introduced an extragradient method for pseudomonotone equilibrium problems, which is computa-tionally expensive because of the two projections defined onto the constrained set. Efforts for deducing the computational costs in computing the projection have been made by us-ing penalty function methods or relaxus-ing the constrained convex set by polyhedral convex ones; see,e.g., [–].
In , Santos and Scheimberg [] further proposed an inexact subgradient algorithm for solving a wide class of equilibrium problems that requires only one projection rather than two as in the extragradient method, and of which computational results show the efficiency of this algorithm in finite dimensional Euclidean spaces. On the other hand, it-erative schemes for multivalued nonexpansive mappings are far less developed than those for nonexpansive mappings though they have more powerful applications in solving opti-mization problems; see,e.g., [–] and the references therein.
In , Eslamian [] considered a proximal point method for nonspreading mappings and multivalued nonexpansive mappings and equilibrium problems. To be more precise, they proposed the following iterative method:
F(un,z) +rny–un,un–xn ≥, ∀y∈K,
xn+=αnun+βnfnun+γnzn, n≥,
whereTn=Tn(modN),zn∈Tnun,αn+βn+γn= for alln≥ andfi,Tiare finite families of nonspreading mappings and multivalued nonexpansive mappings fori= , , . . . ,N, re-spectively. Moreover, he further proved the weak and strong convergence theorems of the iterative sequences under the condition of monotone defined on a bifunctionF.
In this paper, inspired and motivated by research going on in this area, we introduce a hybrid subgradient method for the pseudomonotone equilibrium problem and a finite family of multivalued nonexpansive mappings, which is defined in the following way:
⎧ ⎪ ⎨ ⎪ ⎩
wn∈∂nF(xn,·)xn,
un=PK(xn–γnwn), γn=max{σβnn,wn},
xn+=αnxn+ ( –αn)zn, n≥,
(.)
where Tn=Tn(modN), zn∈Tnun, and {αn}, {βn},{n}, and{σn}are nonnegative real se-quences.
Our purpose is not only to modify the proximal point iterative schemes (.) for the equilibrium problem to a hybrid subgradient method for a class of pseudomonotone equi-librium problems and a finite family of multivalued nonexpansive mappings, but also to establish weak and strong convergence theorems involving only one projection rather than two as in the extragradient method [] and the inexact subgradient method [] for the equilibrium problem. Our theorems presented in this paper improve and extend the cor-responding results of [, , , ].
2 Preliminaries
LetK be a nonempty closed convex subset of a real Hilbert spaceHwith inner product ·,·and norm · , respectively. For every pointx∈H, there exists a unique nearest point inK, denoted byPK(x), such that
x–PK(x)≤ x–y, ∀y∈K.
ThenPK is called the metric projection ofHontoK. It is well known thatPK is nonex-pansive and satisfies the following properties:
x–PK(x),PK(x) –y
≥, ∀x∈H,y∈K, (.)
x–y≥x–PK(x)
+y–PK(x)
, ∀x∈H,y∈K. (.)
Recall also that a bifunctionF:K×K→Ris said to be
(i) r-strongly monotone if there exists a numberr> such that
F(x,y) +F(y,x)≤–rx–y, ∀x,y∈K;
(ii) monotone onKif
F(x,y) +F(y,x)≤, ∀x,y∈K;
(iii) pseudomonotone onKwith respect tox∈Kif
It is clear that (i)⇒(ii)⇒(iii), for everyx∈K. Moreover,Fis said to be pseudomonotone onKwith respect toA⊆K, if it is pseudomonotone onKwith respect to everyx∈A. WhenA≡K,Fis called pseudomonotone onK.
The following example, taken from [], shows that a bifunction may not be pseu-domonotone onK, but yet is pseudomonotone onKwith respect to the solution set of the equilibrium problem defined byFandK:
F(x,y) := y|x|(y–x) +xy|y–x|, ∀x,y∈R, K:= [–, ].
Clearly,EP(F,K) ={}. SinceF(y, ) = for everyy∈K, this bifunction is pseudomono-tone onKwith respect to the solutionx∗= . However,Fis not pseudomonotone onK. In fact, bothF(–., .) = . > andF(., –.) = . > .
To study the equilibrium problem (.), we may assume thatis an open convex set containingKand the bifunctionF:×→Rsatisfy the following assumptions:
(C) F(x,x) = for eachx∈KandF(x,·)is convex and lower semicontinuous onK; (C) F(·,y)is weakly upper semicontinuous for eachy∈Kon the open set; (C) Fis pseudomonotone onKwith respect toEP(F,K)and satisfies the strict
paramonotonicity property,i.e.,F(y,x) = forx∈EP(F,K)andy∈Kimplies y∈EP(F,K);
(C) if{xn} ⊆Kis bounded andn→asn→ ∞, then the sequence{wn}with
wn∈∂nF(xn,·)xnis bounded, where∂F(x,·)xstands for the-subdifferential of the convex functionF(x,·)atx.
Throughout this paper, weak and strong convergence of a sequence{xn}inHtoxare denoted byxn xandxn→x, respectively. In order to prove our main results, we need the following lemmas.
Lemma .[] Let H be a real Hilbert space.For all x,y∈H,we have the following
iden-tity:
x–y=x–y– x–y,y.
Lemma .[] Let H be a real Hilbert space andα,β,γ ∈[, ]withα+β+γ = .For
all x,y,z∈H,we have the following identity:
αx+βy+γz=αx+βy+γz–αβx–y
–αγx–z–βγy–z.
Lemma .[] Let{an}and{bn}be two sequences of nonnegative real numbers such that
an+≤an+bn, n≥,
where∞n=bn<∞.Then the sequence{an}is convergent.
Lemma .[] Let K be a nonempty closed convex subset of a real Hilbert space H.Let T:
3 Weak convergence
Theorem . Let K be a nonempty closed convex subset of a Hilbert space H and F:K×
K→Rbe a bifunction satisfying(C)-(C).Let{Ti}Ni=:K→C(K)be a finite family of
multivalued nonexpansive mappings such that=Ni=Fix(Ti)∩EP(F,K)=φand Ti(q) = {q}for i= , , . . . ,N and q∈.For a given point x∈K, <c<σn<σ,{αn},{βn},and{n}
are nonnegative sequences satisfying the following conditions:
(i) αn∈[a,b]⊂(, );
(ii) ∞n=βn=∞,
∞
n=βn<∞,and
∞
n=βnn<∞.
Then the sequence{xn}generated by(.)converges weakly to x∈.
Proof First, we show the existence oflimn→∞xn–pfor everyp∈. It follows from (.) and Lemmas . and . that
xn+–p =αn(xn–p) + ( –αn)(zn–p)
=αnxn–p+ ( –αn)zn–p–αn( –αn)xn–zn
=αnxn–p+ ( –αn)dist(zn,Tnp)–αn( –αn)xn–zn ≤αnxn–p+ ( –αn)H(Tnun,Tnp)–αn( –αn)xn–zn ≤αnxn–p+ ( –αn)un–p–αn( –αn)xn–zn
=αnxn–p+ ( –αn)
xn–p–un–xn+ xn–un,p–un
–αn( –αn)xn–zn
≤ xn–p+ ( –αn)xn–un,p–un–αn( –αn)xn–zn. (.)
Byun=PK(xn–γnwn) and (.), we have
xn–un,p–un ≤γnwn,p–un. (.)
Usingun=PK(xn–γnwn) andxn∈Kagain, we obtain (note thatγn=max{σβnn,wn})
xn–un=xn–un,xn–un ≤γnwn,xn–un ≤γnwnxn–un
≤βnxn–un, (.)
which implies thatxn–un ≤βn. Substituting (.) into (.) yields
xn+–p≤ xn–p+ ( –αn)γnwn,p–un–αn( –αn)xn–zn
=xn–p+ ( –αn)γnwn,p–xn+ ( –αn)γnwn,xn–un
–αn( –αn)xn–zn
≤ xn–p+ ( –αn)γnwn,p–xn+ ( –αn)γnwnxn–un
≤ xn–p+ ( –αn)γnwn,p–xn+ ( –αn)βn
–αn( –αn)xn–zn. (.)
Sincewn∈∂nF(xn,·)xnandF(x,x) = for allx∈K, we have
wn,p–xn ≤F(xn,p) –F(xn,xn) +n
≤F(xn,p) +n. (.)
On the other hand, sincep∈EP(F,K),i.e.,F(p,x)≥ for allx∈K, by the pseudomono-tonicity ofFwith respect top, we haveF(x,p)≤ for allx∈K. Replacingxbyxn∈K, we getF(xn,p)≤. Then from (.) and (.), it follows that
xn+–p≤ xn–p+ ( –αn)γnF(xn,p) + ( –αn)γnn+ ( –αn)βn
–αn( –αn)xn–zn
≤ xn–p+ ( –αn)γnn+ ( –αn)βn–αn( –αn)xn–zn
≤ xn–p+ ( –αn)γnn+ ( –αn)βn. (.)
Applying Lemma . to (.), by condition (ii), we obtain the existence oflimn→∞xn–
p=d.
Now, we claim thatlim supn→∞F(xn,p) = for everyp∈. Indeed, sinceFis pseu-domonotone onKandF(p,xn)≥, we have –F(xn,p)≥. From (.), we have
( –αn)γn
–F(xn,p)
≤ xn–p–xn+–p
+ ( –αn)γnn+ ( –αn)βn. (.)
Summing up (.) for everyn, we obtain
≤ ∞
n=
( –αn)γn
–F(xn,p)
≤ x–p+ ∞
n=
γnn+ ∞
n=
βn< +∞. (.)
By the assumption (C), we can find a real numberwsuch thatwn ≤wfor everyn. SettingL:=max{σ,w}, whereσis a real number such that <σn<σfor everyn, it follows from (i) that
≤( –b)
L
∞
n=
βn
–F(xn,p)
≤ ∞
n=
( –αn)γn
–F(xn,p)
< +∞,
which implies that
∞
n=
βn
–F(xn,p)
Combining with –F(xn,p)≥ and
∞
n=βn=∞, we can deduced thatlim supn→∞F(xn,
p) = as desired.
Next, we show that any weak subsequential limit of the sequence of{xn}is an element of=Ni=Fix(Ti)∩EP(F,K). To do this, suppose that{xni}is a subsequence of{xn}. For simplicity of notation, without loss of generality, we may assume thatxni xasi→ ∞. By convexity,Kis weakly closed and hencex∈K. SinceF(·,p) is weakly upper semicon-tinuous forp∈, we have
F(x,p)≥lim sup
i→∞ F(xni,p) =ilim→∞F(xni,p) =lim sup
n→∞ F(xn,p) = . (.)
By the pseudomonotonicity ofFwith respect topandF(p,x)≥, we obtainF(x,p)≤. ThusF(x,p) = . Moreover, by the assumption (C), we can deduce thatxis a solution of
EP(F,K). On the other hand, it follows from (.) and condition (ii) that
lim
n→∞xn–un= . (.)
From (.) and conditions (i)-(ii), we have
αn( –αn)xn–zn≤ xn–p–xn+–p+ ( –αn)γnn+ ( –αn)βn,
taking the limit asn→ ∞yields
lim
n→∞xn–zn= , (.)
and thus
lim
n→∞dist(xn,Tnun)≤nlim→∞xn–zn= . (.)
Using (.) again, we have
lim
n→∞xn+–xn=nlim→∞( –αn)xn–zn= . (.)
It follows that
lim
n→∞xn+i–xn= , i= , , . . . ,N. (.)
Note that
un+–un ≤ un+–xn++xn+–xn+xn–un.
Combining (.) and (.), we obtain
lim
This also implies that
lim
n→∞un+i–un= , i= , , . . . ,N. (.)
Observe that
dist(un,Tn+iun)≤ un–xn+xn–xn+i+dist(xn+i,Tn+iun+i) +H(Tn+iun+i,Tn+iun) ≤ un–xn+xn–xn+i+dist(xn+i,Tn+iun+i) +un+i–un.
Together with (.), (.), (.), and (.), we have
lim
n→∞dist(un,Tn+iun) = , i= , , . . . ,N, (.)
which implies that the sequence
N
i=
dist(un,Tn+iun)
n≥→ asn→ ∞. (.)
Fori= , , . . . ,N, we note also that
dist(un,Tiun)
n≥=
dist(un,Tn+(i–n)un)
n≥
=dist(un,Tn+inun)
n≥
⊂ N
i=
dist(un,Tn+iun)
n≥,
wherei–n=in(modN) andin∈ {, , . . . ,N}. Therefore, we have
lim
n→∞dist(un,Tiun) = , i= , , . . . ,N. (.)
Similarly, fori= , , . . . ,N, we obtain
dist(xn,Tixn)≤ xn–un+dist(un,Tiun) +H(Tiun,Tixn) ≤xn–un+dist(un,Tiun).
It follows from (.) and (.) that
lim
n→∞dist(xn,Tixn) = , i= , , . . . ,N. (.)
Applying Lemma . to (.), we can deduce thatx∈Fix(Ti) fori= , , . . . ,Nand hence
x∈.
subsequences of{xn}such thatxnk wandxnj w, respectively. Sincelimn→∞xn–p exists for allp∈andw,w∈, we see thatlimn→∞xn–wandlimn→∞xn–w exist. Now letw=w, then by Opial’s property,
lim
n→∞xn–w=klim→∞xnk–w < lim
k→∞xnk–w=nlim→∞xn–w =lim
j→∞xnj–w< lim
j→∞xnj–w
= lim
n→∞xn–w,
which is a contradiction. Therefore,w=w. This shows thatωw(xn) is a single point set,
i.e.,xn x. This completes the proof.
Theorem . Let K be a nonempty closed convex subset of a Hilbert space H and F :
K×K→Rbe a bifunction satisfying(C)-(C).Let T:K→C(K)be a multivalued non-expansive mapping such that=Fix(T)∩EP(F,K)=φand T(q) ={q}for all q∈.For a given point x∈K, <c<σn<σ,let{xn}be defined by
⎧ ⎪ ⎨ ⎪ ⎩
wn∈∂nF(xn,·)xn,
un=PK(xn–γnwn), γn=max{σβnn,wn},
xn+=αnxn+ ( –αn)zn, n≥,
where zn∈Tun,{αn},{βn},and{n}are nonnegative sequences satisfying the following
con-ditions:
(i) αn∈[a,b]⊂(, );
(ii) ∞n=βn=∞,
∞
n=βn<∞,and
∞
n=βnn<∞.
Then the sequence{xn}converges weakly to x∈.
Proof PuttingN= , thenTi=T, a single multivalued nonexpansive mapping, and the
conclusion follows immediately from Theorem .. This completes the proof.
4 Strong convergence
To obtain strong convergence results, we either add the control conditionlimn→∞αn=, or we remove the conditionT(q) ={q}for allq∈and adjust the nonempty compact subsetC(K) to a proximal bounded subsetP(K) ofKas follows.
Theorem . Let K be a nonempty closed convex subset of a Hilbert space H and F:K×
K→Rbe a bifunction satisfying(C)-(C).Let{Ti}Ni=:K→C(K)be a finite family of
multivalued nonexpansive mappings such that=Ni=Fix(Ti)∩EP(F,K)=φand Ti(q) = {q}for i= , , . . . ,N and q∈.For a given point x∈K, <c<σn<σ,let{xn}be defined
by
⎧ ⎪ ⎨ ⎪ ⎩
wn∈∂nF(xn,·)xn,
un=PK(xn–γnwn), γn=max{σβnn,wn},
xn+=αnxn+ ( –αn)zn, n≥,
where Tn=Tn(modN),zn∈Tnun,{αn},{βn},and{n}are nonnegative sequences satisfying
the following conditions:
(i) αn∈[a,b]⊂(, )andlimn→∞αn=;
(ii) ∞n=βn=∞,
∞
n=βn<∞,and
∞
n=βnn<∞.
Then the sequence{xn}generated by(.)converges strongly to x∗∈.
Proof By a similar argument to the proof of Theorem . and (.), we have
zn–P(xn)
≤ zn–xn–xn–P(xn)
. (.)
It follows from (.) that
xn+–P(xn+)≤αn
xn–P(xn)
+ ( –αn)
zn–P(xn)
≤αnxn–P(xn)
+ ( –αn)zn–P(xn)
≤(αn– )xn–P(xn)
+ ( –αn)zn–xn. (.)
Combining (.),limn→∞αn=, and the boundedness of the sequence{xn–P(xn)}, we obtain
lim
n→∞xn+–P(xn+)= . (.)
By the assumptions (C) and (C), the setis convex (see the proof of Theorem in []). For allm>n, we have(P(xm) +P(xn))∈, and therefore
P(xm) –P(xn)
= xm–P(xm)
+ xm–P(xn)
– xm–
P(xm) +P(xn)
≤xm–P(xm)
+ xm–P(xn)
– xm–P(xm)
= xm–P(xn)
– xm–P(xm)
. (.)
Using (.) withp=P(xn), we have
xm–P(xn)
≤xm––P(xn)
+ ( –αm–)γm–m–+ ( –αm–)βm–
≤xm––P(xn)+ηm–+ηm– ≤ · · ·
≤xn–P(xn)+ m–
j=n
ηj, (.)
whereηj= ( –αj)γjj+ ( –αj)βj. It follows from (.) and (.) that
P(xm) –P(xn)
≤xn–P(xn)
+
m–
j=n
ηj– xm–P(xm)
Together with (.) andmj=–n ηj<∞, this implies that{P(xn)}is a Cauchy sequence. Hence{P(xn)}strongly converges to some pointx∗∈. Moreover, we obtain
x∗= lim
i→∞P(xni) =P(x) =x, (.)
which implies thatP(xn)→x∗=x∈. Then, from (.), (.), and (.), we can
con-clude thatxn→x∗. This completes the proof.
Theorem . Let K be a nonempty closed convex subset of a Hilbert space H and F:K×
K→Rbe a bifunction satisfying(C)-(C).Let{Ti}Ni=:K→P(K)be a finite family of
multivalued mappings such that PTi is nonexpansive,where PTi:={y∈Tix:dist(x,Tix) = x–y}and=iN=Fix(Ti)∩EP(F,K)=φ.For a given point x∈K, <c<σn<σ,let {xn}be defined by
⎧ ⎪ ⎨ ⎪ ⎩
wn∈∂nF(xn,·)xn,
un=PK(xn–γnwn), γn=max{σβnn,wn},
xn+=αnxn+ ( –αn)zn, n≥,
(.)
where Tn=Tn(modN),zn∈PTnun,{αn},{βn},and{n}are nonnegative sequences satisfying
the following conditions:
(i) αn∈[a,b]⊂(, );
(ii) ∞n=βn=∞,
∞
n=βn<∞,and
∞
n=βnn<∞.
Then the sequence{xn}converges strongly to x∗∈.
Proof Takingp∈, thenPTn(p) ={p}. By substitutingPTinstead ofT and similar argu-ment as (.) in the proof of Theorem . we obtain
lim
n→∞dist
xn,Ti(xn)
≤ lim
n→∞dist
xn,PTi(xn)
= . (.)
By compactness ofK, there exists a subsequence{xnk}of{xn}such thatlimk→∞xnk=x∗, for somex∗∈K. SincePTiis nonexpansive fori= , , . . . ,N, we have
distx∗,Ti
x∗≤distx∗,PTi
x∗
≤x∗–xnk+dist
xnk,PTi(xnk)
+HPTi(xnk),PTi
x∗
≤x∗–xnk+dist
xnk,PTi(xnk)
. (.)
It follows from (.) and (.) that
lim
k→∞dist
x∗,Ti
x∗= , (.)
which implies thatx∗∈Ni=Fix(Ti). Since{xnk}converges strongly tox∗andlimn→∞xn–
x∗exists (as in the proof of Theorem .), we find that{xn}converges strongly tox∗. This
completes the proof.
Example . LetH=RandK:= [, ] with usual metric. Consider the nonsmooth equi-librium problem defined by the bifunction
F(x,y) = xy(y–x) +xy|y–x|, ∀x,y∈K.
Clearly,Fis pseudomonotone onK. Note thatF(x,·) is convex forx∈K and∂F(x,·)x= [x, x] by taking
n= for alln∈N. (i) Let Tx:= [x
,
x
] defined on K:= [, ]. Note thatT is a multivalued nonexpansive mapping andFix(T)∩EP(F,K) ={}. SettingN= ,σn= ,αn=,βn=n, andxn–x∗ ≤ –as stop criteria, we obtain the results of algorithm (.) with different initial points in Table .
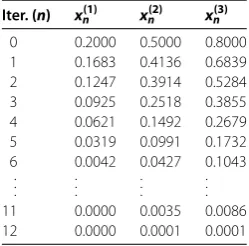
(ii) LetTx:= [–x, –x] defined on [,∞)→R. Note that T is not nonexpansive but
PTx={–x}is nonexpansive for allx∈[,∞). Indeed, for eachu∈Tx,u= –ax, ≤a≤, choosev= –ay. Then
|u–v|=–ax– (–ay)=a|x–y| ≤|x–y|=H(Tx,Ty).
On the other hand, for anyx, we have ∈[,∞) andT ={}. It follows thatFix(T)∩
EP(F,K) ={}. SettingN= ,σn= ,αn=,βn=n, andxn–x∗ ≤–as stop criteria, we obtain the results of algorithm (.) with different initial points to be found in Table . The computations are performed by Matlab Ra running on a PC Desktop Intel(R) Core(TM) i-M, CPU @. GHz, MHz, . GB, GB RAM.
Remark . Our hybrid subgradient method improves the extragradient method of Tran
et al.[] and the inexact subgradient algorithm of Santos and Scheimberg [] for an equi-librium problem in deducing the computational costs of an iterative process.
Table 1 Numerical results for an initial pointx0= 0.2, 0.5, 0.8
Iter.(n) x(1)n x(2)n xn(3)
0 0.2000 0.5000 0.8000 1 0.1459 0.3618 0.4782 2 0.0816 0.2157 0.2391 3 0.0314 0.1031 0.1206 4 0.0027 0.0351 0.0524 5 0.0000 0.0059 0.0093 6 0.0000 0.0000 0.0001
Table 2 Numerical results for an initial pointx0= 0.2, 0.5, 0.8
Iter.(n) x(1)n x(2)n xn(3)
0 0.2000 0.5000 0.8000 1 0.1683 0.4136 0.6839 2 0.1247 0.3914 0.5284 3 0.0925 0.2518 0.3855 4 0.0621 0.1492 0.2679 5 0.0319 0.0991 0.1732 6 0.0042 0.0427 0.1043
. . .
. . .
. . .
Remark . Our results generalize the results of Eslamian [], a proximal point method for an equilibrium problem, to a hybrid subgradient method for a pseudomonotone equi-librium problem.
Competing interests
The author declares to have no competing interests.
Acknowledgements
The author is grateful to the anonymous referees for valuable remarks suggestions which helped him very much in improving this manuscript. This work was supported by the National Science Foundation of China (11471059, 11271388), Basic and Advanced Research Project of Chongqing (cstc2014jcyjA00037) and Science and Technology Research Project of Chongqing Municipal Education Commission (KJ1400618).
Received: 23 April 2014 Accepted: 30 October 2014 Published:17 Nov 2014
References
1. Blum, E, Oettli, W: From optimization and variational inequality to equilibrium problems. Math. Stud.63, 127-149 (1994)
2. Auslender, A, Teboulle, M, Ben-Tiba, S: A logarithmic quadratic proximal method for variational inequalities. Comput. Optim. Appl.12, 31-40 (1999)
3. Combettes, PL, Hirstoaga, SA: Equilibrium programming in Hilbert spaces. J. Nonlinear Convex Anal.6, 117-136 (2005) 4. Facchinei, F, Pang, JS: Finite-Dimensional Variational Inequalities and Complementarity Problems. Springer, New York
(2003)
5. Tran, QD, Muu, LD, Nguyen, VH: Extragradient algorithms extended to equilibrium problems. Optimization57, 749-776 (2008)
6. Muu, LD, Oettli, W: Convergence of an adaptive penalty scheme for finding constrained equilibria. Nonlinear Anal. TMA18, 1159-1166 (1992)
7. Anh, PN: A logarithmic quadratic regularization method for solving pseudo-monotone equilibrium problem. Acta Math. Vietnam.34, 183-200 (2009)
8. Nguyen, TTV, Strodiot, JJ, Nguyen, VH: The interior proximal extragradient method for solving equilibrium problems. J. Glob. Optim.40, 175-192 (2009)
9. Anh, PN, Kim, JK: Outer approximation algorithms for pseudomonotone equilibrium problems. Comput. Math. Appl. 61, 2588-2595 (2011)
10. Wen, D-J: Strong convergence theorems for equilibrium problems andk-strict pseudocontractions in Hilbert spaces. Abstr. Appl. Anal.2011, Article ID 276874 (2011). doi:10.1155/2011/276874
11. Qin, X, Cho, SY, Kang, SM: An extragradient-type method for generalized equilibrium problems involving strictly pseudocontractive mappings. J. Glob. Optim.49, 679-693 (2011)
12. Anh, PN, Kim, JK, Nam, JM: Strong convergence of an extragradient method for equilibrium problems and fixed point problems. J. Korean Math. Soc.49, 187-200 (2012)
13. Wen, D-J, Chen, Y-A: General iterative methods for generalized equilibrium problems and fixed point problems of
k-strict pseudo-contractions. Fixed Point Theory Appl.2012, 125 (2012)
14. Vuong, PT, Strodiot, JJ, Nguyen, VH: Extragradient methods and linesearch algorithms for solving Ky Fan inequalities and fixed point problems. J. Optim. Theory Appl.155, 605-627 (2012)
15. Santos, P, Scheimberg, S: An inexact subgradient algorithm for equilibrium problems. Comput. Appl. Math.30, 91-107 (2011)
16. Ceng, LC, Yao, JC: Hybrid viscosity approximation schemes for equilibrium problems and fixed point problems of infinitely many nonexpansive mappings. Appl. Math. Comput.198, 729-741 (2008)
17. Song, Y, Wang, H: Convergence of iterative algorithms for multivalued mappings in Banach spaces. Nonlinear Anal. 70, 1547-1556 (2009)
18. Eslamian, M, Abkar, A: One-step iterative process for a finite family of multivalued mappings. Math. Comput. Model. 54, 105-111 (2011)
19. Shahzad, N, Zegeye, H: On Mann and Ishikawa iteration schemes for multivalued maps in Banach space. Nonlinear Anal.71, 838-844 (2009)
20. Qin, X, Cho, YJ, Kang, SM: Viscosity approximation methods for generalized equilibrium problems and fixed point problems with applications. Nonlinear Anal.72, 99-112 (2010)
21. Eslamian, M: Convergence theorems for nonspreading mappings and nonexpansive multivalued mappings and equilibrium problems. Optim. Lett.7, 547-557 (2013)
22. Wen, D-J: Projection methods for generalized system of nonconvex variational inequalities with different nonlinear operators. Nonlinear Anal.73, 2292-2297 (2010)
23. Long, XJ, Quan, J, Wen, D-J: Proper efficiency for set-valued optimization problems and vector variational-like inequalities. Bull. Korean Math. Soc.50, 777-786 (2013)
24. Marino, G, Xu, HK: Weak and strong convergence theorems for strict pseudo-contractions in Hilbert space. J. Math. Anal. Appl.329, 336-346 (2007)
25. Osilike, MO, Igbokwe, DI: Weak and strong convergence theorems for fixed points of pseudocontractions and solutions of monotone type operator equations. Comput. Math. Appl.40, 559-567 (2000)
10.1186/1687-1812-2014-232