IOS Press
Optimization design of structures subjected to
transient loads using
first and second
derivatives of dynamic displacement and
stress
Qimao Liu
a,∗, Jing Zhang
cand Liubin Yan
baDepartment of Civil and Structural Engineering, Aalto University, Espoo, Finland bCollege of Civil and Architecture Engineering, Guangxi University, Nanning, China
cDepartment of Mechanical Engineering, Indiana University-Purdue University Indianapolis, Indianapolis, IN, USA
Received 16 September 2010 Revised 19 July 2011
Abstract.This paper developed an effective optimization method, i.e., gradient-Hessian matrix-based method or second order method, of frame structures subjected to the transient loads. An algorithm offirst and second derivatives of dynamic displacement and stress with respect to design variables is formulated based on the Newmark method. The inequality time-dependent constraint problem is converted into a sequence of appropriately formed time-independent unconstrained problems using the integral interior point penalty function method. The gradient and Hessian matrixes of the integral interior point penalty functions are also computed. Then the Marquardt’s method is employed to solve unconstrained problems. The numerical results show that the optimal design method proposed in this paper can obtain the local optimum design of frame structures and sometimes is more efficient than the augmented Lagrange multiplier method.
Keywords: Dynamic response optimization, gradient, Hessian matrix, time-dependent constraint
1. Introduction
Dynamic response analysis of structures subjected to transient loads often requires much more demanding
com-putational cost than static analysis. Therefore the efficiency of the optimization method becomes critical to
dy-namic response optimization problems. Mathematically, there are three types of dydy-namic response optimization
methods: zero order methods (nongradient-based algorithms),first order methods (gradient-based algorithms) and
second order methods (gradient-Hessian matrix-based algorithms). Generally, the first order methods are more
efficient than the zero order methods, and the second order methods are more efficient than thefirst order methods.
Zero order methods require only the information of dynamic responses to construct optimal algorithms. A lot of nongradient-based algorithms [1–4] have been developed to solve the optimization problem of structures subjected
to transient loads. First order methods require the information of dynamic responses and theirfirst derivatives with
respect to design variables to construct optimal algorithms. Therefore, it is very crucial to calculate efficiently the
∗Corresponding author: Qimao Liu, Department of Civil and Structural Engineering, Aalto University, Espoo, FI-00076 Aalto, Finland. Tel.:
+358 9 470 23701; Fax: +358 9 470 23758; E-mail: [email protected]. ISSN 1070-9622/12/$27.502012 – IOS Press and the authors. All rights reserved
first derivatives of structural dynamic responses for gradient-based algorithms. However, many algorithms have been
developed to calculate dynamic responsefirst derivatives with respect to design variables (also called sensitivity
anal-ysis [5–12]). Today, the gradient-based algorithms are the mainstream pattern [13] to solve the optimization problem of structures subjected to transient loads. Much research [14–17] has been done to solve the structural dynamic response optimization problem with the gradient-based algorithms. Second order methods require the information of
dynamic responses, theirfirst and second derivatives with respect to design variables to construct optimal algorithms.
The Newton’s method and Quasi Newton’s method are the commonly used second order method. Although many
researchers have calculated dynamic responsefirst derivatives with respect to design variables, there is little literature
published on dynamic response second derivative analysis (also called Hessian matrix analysis). Second derivative
analysis is more complicated thanfirst derivative analysis. However, the efficiency of the optimization using second
derivative can be greatly improved when the gradient and Hessian matrix can be calculated efficiently. In this paper,
a gradient-Hessian matrix-based algorithm for optimization problem of structures subjected to transient loads is developed based on gradient and Hessian matrix calculations.
The purpose of this paper is to develop a gradient-Hessian matrix-based optimization method for structures subjected to dynamic loads. The main work of this paper is as follows: First, we formulate an algorithm to calculate
dynamic responses and theirfirst and second derivatives with respect to design variables. The algorithm is achieved
by direct differentiation and only a single dynamics analysis, based on Newmark-βmethod [18], is required. Second,
we formulate the time-dependent structural optimization model. In this model, total mass of the structure is the objective function. The dynamic responses including stresses of the beam element and nodal displacements are constraints. Third, the time-dependent optimization model is converted into a sequence of appropriately formed unconstrained integral mathematic models using the interior penalty function method. The gradient and Hessian
matrixes of the interior penalty functions are also calculated using thefirst and second derivatives of dynamic
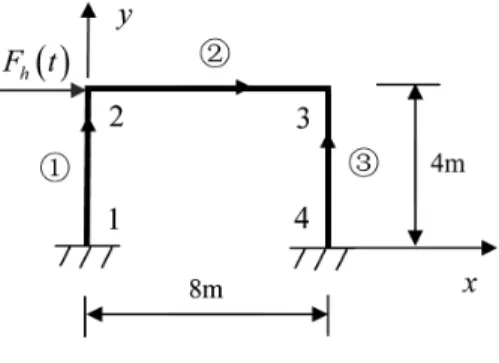
responses. Fourth, Marquardt’s method [19], a gradient-Hessian matrix-based algorithm, is employed to solve the unconstrained integral mathematic model. Finally, as the illustration of the developed approach, optimization designs of a plane frame subjected to the horizontal dynamic loads are demonstrated.
2. Calculation offirst and second derivatives
This section presents two subjects. Section 2.1 introduces the calculations offirst and second derivatives of
dynamic responses (i.e., nodal displacement and normal stress) with respect to design variables of structures.
Section 2.2 discusses how to calculatefirst and second derivatives of structural mass with respect to structural design
variables.
2.1. Calculation offirst and second derivatives of dynamic displacement and stress
Thefirst and second derivatives of dynamic response of structures are the prerequisites of an efficient
gradient-Hessian matrix-based algorithm. We will show here that, in a single structural dynamic analysis, thefirst and second
derivatives of a dynamic response can be derived simultaneously.
Plane beam element is used extensively in engineering. Therefore, the dynamic optimal design method is demon-strated with the plane beam element in this work. The element cross-section shown in Fig. 1 is H structural-steel
shape. The design variables of elementearede
1,de2,de3andde4. Pointcis the centroid of the element cross-section.
Axesyandzare the principal centroidal axes.
The cross-sectional area is
Ae= 2de1d3e+de2de4 (1)
The cross-sectional moment of inertia is
Ize=d e 4de23 12 + 2 de 1de33 12 + de 3+d2e 2 2 de1de3 (2)
Fig. 1. Element cross-section and element design variables. yme =± de3+d e 2 2 (3)
Thefirst moment of the shaded area with respect to the neutral axis is
Sze∗max=de1de3d e 3+de2 2 + de 2 2 de4 de 2 4 (4)
The structure is divided withNelements. The design variable vector is defined as.
d=d11, d12, d13, d14,· · ·, de1, d2e, de3, de4,· · ·, d1N, dN2, dN3, dN4T (5)
Consider the equations of motion for a linear system subjected to dynamic forces
M¨x+C ˙x+Kx=f(t) (6)
with the following initial conditions:
x(0) =x0
˙x(0) = ˙x0 (7)
whereK,M, andCare stiffness matrix, mass matrix , and damping matrix, respectively. x(t), ˙x(t)and¨x(t)
are unknown nodal displacement, velocity and acceleration vectors, andf(t)is the load vector. Suppose that the
dynamic loads act on the nodes.
Rayleigh damping is used in this work, the structural damping matrix is
C=α1M+α2K (8) where α1= 2 ς1 ω1 −ω2ς2 1 ω21 −ω122 (9) α2= 2 (ς2ω2−ς1ω1) ω22−ω12 (10)
whereω1andω2are thefirst and second natural frequency of the structure, respectively.ς1andς2are the damping
ratio. In this work,ς1=ς2= 0.02.α1andα2are constants.
Equations (6) and (7) must be satisfied for all time periodt ∈ [0,Γ]. Γ is the duration of the dynamic loads.
In practice, the solution of this initial-boundary-value problem (IBVP) requires integration through time. This is achieved numerically by discretising in time the continuous temporal derivatives that appear in the equation. Any one of the time integration procedures can be used for this purpose. The most widely used family of direct time integration methods for solving Eq. (6) is the Newmark family of methods. The Newmark method can be formulated
by considering equilibrium at any discrete timet+ Δt, and is given by the following equation:
The nodal displacements, nodal accelerations and nodal velocities can be achieved at any timet+ Δtby solving
Eq. (11).
Perhaps the most widely used direct method for the equation of motion (6) is the Newmark method, an
im-plicit technique, which consists of the followingfinite difference assumptions with regard to the evolution of the
approximate solution: x(t+ Δt) =x(t) + Δt˙x(t) + Δt2 1 2−β ¨ x(t) +β¨x(t+ Δt) (12) ˙x(t+ Δt) =˙x(t) + Δt[(1−δ)¨x(t) +δ¨x(t+ Δt)] (13)
where any particular choice of the parametersβ andδdetermines the stability and accuracy characteristics of the
solution. In this work, parametersδ0.5 andβ = 0.25 (0.5 +δ)2. We define the integral constants:a0 = 1
βΔt2,
a1=βδΔt,a2=βΔ1t,a3=21β−1,a4= δβ−1,a5= Δ2t βδ −2
,a6= Δt(1−δ),a7=δΔt. The parametersβ
andδwill be replaced by those constants in the following formulas.
In addition to Eqs (12) and (13) the equilibrium Eq. (11) at time stationt+ Δtis considered. This way a system of
equations is formed for the determination of the three unknownsx(t+ Δt), ˙x(t+ Δt)andx¨(t+ Δt), assuming
that the displacement, velocity, and acceleration vectors at the previous time stationthave already been computed.
Thus, the solution for the displacement vector is
K∗x(t+ Δt) =F∗(t+ Δt) (14)
where
K∗=K+a0M+a1C (15)
and
F∗(t+ Δt) =f(t+ Δt) +M[a0x(t) +a2˙x(t) +a3¨x(t)] +C[a1x(t) +a4˙x(t) +a5¨x(t)] (16)
The accelerations,x¨(t+ Δt), which are required for the computations at the next time station, can be computed
as ¨
x(t+ Δt) =a0[x(t+ Δt)−x(t)]−a2˙x(t)−a3¨x(t) (17)
while the velocities,˙x(t+ Δt), can be obtained directly from equation (13), as follows.
˙x(t+ Δt) =˙x(t) +a6x¨(t) +a7¨x(t+ Δt) (18)
When the dynamic loads act on the nodes, we only need to determine the internal forces and internal couples at
the center and two ends of the element. The element nodal force vector,F¯e(t+ Δt), is
¯
Fe(t+ Δt) =K¯eTeδe(t+ Δt) (19)
whereK¯eis the element stiffness matrix in a local coordinate system,Teis the element coordinate transformation
matrix,δe(t+ Δt)is the element nodal displacement vector in a local coordinate system.
The internal force vector at the center of element,F¯e
M(t+ Δt), is ¯ FeM(t+ Δt) = −F¯e 1(t+ Δt) −F¯2e(t+ Δt) le2F¯2e(t+ Δt)−F¯e3(t+ Δt) T (20)
where le is the length of element. The three terms, i.e., −F¯e
1(t+ Δt), −F¯e2(t+ Δt) and le2F¯e2(t+ Δt)−
¯
Fe3(t+ Δt), are axial force, shear force and bending moment, respectively. F¯e1(t+ Δt), F¯e2(t+ Δt) and
¯
Fe3(t+ Δt)are thefirst, second and third term of the element nodal force vector,F¯e(t+ Δt), respectively.
The maximum stress at the center and two ends, i.e. theiend and thej end, of the element are calculated as
follows.
The maximum normal stress at theiend of the element is
σixe (t+ Δt) =F¯ e 1(t+ Δt) Ae + ¯ Fe 3(t+ Δt)yme EIe z (21)
The maximum normal stress at thejend of the element is σjxe (t+ Δt) = F¯ e 4(t+ Δt) Ae + ¯ Fe 6(t+ Δt)yem EIe z (22) whereF¯e
4(t+ Δt)andF¯e6(t+ Δt)are the fourth and sixth term of the element nodal force vector,F¯e(t+ Δt),
respectively.
The maximum normal stress at the center of the element is
σMxe (t+ Δt) = F¯ e M1(t+ Δt) Ae + ¯ FeM3(t+ Δt)yem EIe z (23) whereF¯e
M1(t+ Δt)andF¯eM3(t+ Δt)are the first and third term of the internal force vector at the center of
element,F¯e
M(t+ Δt), respectively.
The maximum shear stress at theiend of the element is
τixye (t+ Δt) = F¯ e 2(t+ Δt)Se∗zmax de4Ie z (24)
The maximum shear stress at thejend of the element is
τjxye (t+ Δt) = F¯ e 5(t+ Δt)Sze∗max de 4Ize (25) whereF¯e
5(t+ Δt)is thefifth term of the element nodal force vector,F¯e(t+ Δt).
The maximum shear stress at the center of the element is
τMxye (t+ Δt) = F¯ e M2(t+ Δt)Sze∗max de 4Ize (26) whereF¯e
M2(t+ Δt)is the second term of the internal force vector at the center of element,F¯eM(t+ Δt).
2.1.1. Formulas forfirst derivatives of dynamic displacement and stress
Now we will derive the formulas for thefirst derivatives of dynamic response, i.e., dynamic displacement and
stress. Differentiating Eq. (14) with respect to the design variabledi, we have
K∗∂x(t∂d+ Δt) i = ∂F∗(t+ Δt) ∂di − ∂K∗ ∂di x(t+ Δt) (27) where ∂K∗ ∂di = ∂K ∂di +a0 ∂M ∂di +a1 ∂C ∂di (28) and ∂F∗(t+ Δt) ∂di = ∂M ∂di [a0x(t) +a2˙x(t) +a3x¨(t)] +M a0∂x(t) ∂di +a2 ∂˙x(t) ∂di +a3 ∂¨x(t) ∂di +∂C ∂di[a1x(t) +a4˙x(t) +a5¨x(t)] +C a1∂x(t) ∂di +a4 ∂˙x(t) ∂di +a5 ∂x¨(t) ∂di (29)
After thefirst derivatives of displacement vector at timet+ Δtis obtained from Eq. (27), through differentiating
Eq. (17) with respect to design variablesdi, we have
∂¨x(t+ Δt) ∂di =a0 ∂x(t+ Δt) ∂di − ∂x(t) ∂di −a2∂˙x(t) ∂di −a3 ∂¨x(t) ∂di (30)
Then, thefirst derivatives of acceleration vector at timet+ Δtis obtained from Eq. (30). Differentiating Eq. (18)
with respect to design variabledi, we have
∂˙x(t+ Δt) ∂di = ∂˙x(t) ∂di +a6 ∂¨x(t) ∂di +a7 ∂¨x(t+ Δt) ∂di (31)
Differentiating Eq. (19) with respect to the design variabledi, we have ∂F¯e(t+ Δt) ∂di = ∂K¯e ∂di T eδe(t+ Δt) +K¯eTe∂δe(t+ Δt) ∂di (32) where∂δe(t+Δt)
∂di can be calculated from
∂x(t+Δt)
∂di .
Differentiating Eq. (20) with respect to the design variabledi, we have
∂F¯e M(t+ Δt) ∂di = −∂F¯e1(t+Δt) ∂di − ∂F¯e2(t+Δt) ∂di le 2∂ ¯ Fe 2(t+Δt) ∂di − ∂F¯e3(t+Δt) ∂di T (33)
Differentiating Eq. (21) with respect to the design variabledi, we have
∂σe ix(t+ Δt) ∂di = ∂F¯e 1(t+ Δt) ∂di 1 Ae− ¯ Fe 1(t+ Δt) Ae2 ∂Ae ∂di +∂F¯e3(t+ Δt) ∂di yem EIe z +F¯e3(t+ Δt) EIe z ∂yem ∂di − ¯ Fe3(t+ Δt)yem EIe2 z ∂Ize ∂di (34)
Differentiating Eq. (22) with respect to the design variabledi, we have
∂σejx(t+ Δt) ∂di = ∂F¯e 4(t+ Δt) ∂di 1 Ae− ¯ Fe 4(t+ Δt) Ae2 ∂Ae ∂di +∂F¯e6(t+ Δt) ∂di ye m EIe z +F¯e6(t+ Δt) EIe z ∂ye m ∂di − ¯ Fe 6(t+ Δt)yem EIe2 z ∂Ie z ∂di (35)
Differentiating Eq. (23) with respect to the design variabledi, we have
∂σe Mx(t+ Δt) ∂di = ∂F¯e M1(t+ Δt) ∂di 1 Ae − ¯ Fe M1(t+ Δt) Ae2 ∂Ae ∂di +∂F¯eM3(t+ Δt) ∂di ye m EIe z +F¯eM3(t+ Δt) EIe z ∂ye m ∂di − ¯ Fe M3(t+ Δt)yme EIe2 z ∂Ie z ∂di (36)
Differentiating Eq. (24) with respect to the design variabledi, we have
∂τe ixy(t+ Δt) ∂di = ∂F¯e2(t+ Δt) ∂di Sze∗max de 4Ize +∂Sze∗max ∂di ¯ Fe2(t+ Δt) de 4Ize −∂de4 ∂di ¯ Fe 2(t+ Δt)Sze∗max de2 4 Ize −∂Ize ∂di ¯ Fe 2(t+ Δt)Sze∗max de 4Ize2 (37)
Differentiating Eq. (25) with respect to the design variabledi, we have
∂τe jxy(t+ Δt) ∂di = ∂F¯e 5(t+ Δt) ∂di Sze∗max de 4Ize +∂Sze∗max ∂di ¯ Fe 5(t+ Δt) de 4Ize −∂de4 ∂di ¯ Fe 5(t+ Δt)Sze∗max de2 4 Ize −∂Ize ∂di ¯ Fe 5(t+ Δt)Sze∗max de 4Ize2 (38)
Differentiating Eq. (26) with respect to the design variabledi, we have
∂τMxye (t+ Δt) ∂di = ∂F¯eM2(t+ Δt) ∂di Sze∗max de 4Ize +∂Sze∗max ∂di ¯ FeM2(t+ Δt) de 4Ize −∂de4 ∂di ¯ Fe M2(t+ Δt)Sze∗max de2 4 Ize −∂Ize ∂di ¯ Fe M2(t+ Δt)Sze∗max de 4Ize2 (39)
2.1.2. Formulas for second derivatives of dynamic displacement and stress
Now we will derive the formulas for the second derivatives of dynamic response, i.e., dynamic displacement and
stress. Further differentiating Eq. (27) with respect to the design variabledj, we have
K∗∂ 2x(t+ Δt) ∂di∂dj = ∂2F∗(t+ Δt) ∂di∂dj − ∂2K∗ ∂di∂djx(t+ Δt)− ∂K∗ ∂di ∂x(t+ Δt) ∂dj − ∂K∗ ∂dj ∂x(t+ Δt) ∂di (40) where ∂2K∗ ∂di∂dj = ∂2K ∂di∂dj +a0 ∂2M ∂di∂dj +a1 ∂2C ∂di∂dj (41) and ∂2F∗(t+ Δt) ∂di∂dj = ∂2M ∂di∂dj [a0x(t) +a2˙x(t) +a3¨x(t)] + ∂M ∂di a0∂x(t) ∂dj +a2 ∂˙x(t) ∂dj +a3 ∂¨x(t) ∂dj +∂M ∂dj a0∂x(t) ∂di +a2 ∂˙x(t) ∂di +a3 ∂¨x(t) ∂di +M a0∂ 2x(t) ∂di∂dj +a2 ∂2˙x(t) ∂di∂dj +a3 ∂2¨x(t) ∂di∂dj + ∂2C ∂di∂dj [a1x(t) +a4˙x(t) +a5x¨(t)] + ∂C ∂di a1∂x(t) ∂dj +a4 ∂˙x(t) ∂dj +a5 ∂¨x(t) ∂dj +∂C ∂dj a1∂x(t) ∂di +a4 ∂˙x(t) ∂di +a5 ∂¨x(t) ∂di +C a1∂ 2x(t) ∂di∂dj +a4 ∂2˙x(t) ∂di∂dj +a5 ∂2¨x(t) ∂di∂dj (42) After ∂2x(t+Δt)
∂di∂dj is computed from Eq. (40), with further differentiating Eq. (30) with respect to the design
variablesdj, we have ∂2¨x(t+ Δt) ∂di∂dj =a0 ∂2x(t+ Δt) ∂di∂dj − ∂2x(t) ∂di∂dj −a2∂ 2˙x(t) ∂di∂dj −a3 ∂2¨x(t) ∂di∂dj (43) Then ∂2¨x(t+Δt)
∂di∂dj is obtained from Eq. (43). Further differentiating Eq. (31) with respect to the design variables
dj, we obtain ∂2˙x(t+ Δt) ∂di∂dj = ∂2˙x(t) ∂di∂dj +a6 ∂2¨x(t) ∂di∂dj +a7 ∂2¨x(t+ Δt) ∂di∂dj (44)
Further differentiating Eq. (32) with respect to the design variabledj, we have
∂2F¯e(t+Δt) ∂di∂dj = ∂ 2K¯e ∂di∂djTeδe(t+ Δt) +∂ ¯ Ke ∂di Te ∂δ e(t+Δt) ∂dj +∂K¯e ∂dj Te ∂δ e(t+Δt) ∂di +K¯eTe ∂ 2δe(t+Δt) ∂di∂dj (45)
Further differentiating Eq. (33) with respect to the design variabledj, we obtain
∂2F¯e M(t+ Δt) ∂di∂dj = −∂2F¯e1(t+Δt) ∂di∂dj − ∂2F¯e2(t+Δt) ∂di∂dj le2 ∂2F¯e2(t+Δt) ∂di∂dj − ∂2F¯e3(t+Δt) ∂di∂dj T (46)
Further differentiating Eq. (34) with respect to the design variabledj, we have
∂2σe ix(t+ Δt) ∂di∂dj = ∂2F¯e 1(t+ Δt) ∂di∂dj 1 Ae − 1 Ae2 ∂F¯e 1(t+ Δt) ∂di ∂Ae ∂dj − 1 Ae2 ∂F¯e 1(t+ Δt) ∂dj ∂Ae ∂di +2F¯e1(t+ Δt) Ae3 ∂Ae ∂dj ∂Ae ∂di − ¯ Fe 1(t+ Δt) Ae2 ∂2Ae ∂di∂dj + ∂2F¯e 3(t+ Δt) ∂di∂dj ye m EIe z +∂F¯e3(t+ Δt) ∂di ∂ye m ∂dj 1 EIe z (47) −∂F¯e3(t+ Δt) ∂di ye m EIe2 z ∂Ie z ∂dj + ∂F¯e 3(t+ Δt) ∂dj 1 EIe z ∂ye m ∂di − ∂Ie z ∂dj ¯ Fe 3(t+ Δt) EIe2 z ∂ye m ∂di + ¯ Fe 3(t+ Δt) EIe z ∂2ye m ∂di∂dj −∂F¯e3(t+ Δt) ∂dj yem EIe2 z ∂Ize ∂di − ∂yme ∂dj ¯ Fe3(t+ Δt) EIe2 z ∂Ize ∂di + ∂Ize ∂dj 2F¯e 3(t+ Δt)yem EIe3 z ∂Ize ∂di − ¯ Fe3(t+ Δt)yme EIe2 z ∂2Ize ∂di∂dj
Further differentiating Eq. (35) with respect to the design variabledj, we obtain ∂2σe jx(t+ Δt) ∂di∂dj = ∂2F¯e 4(t+ Δt) ∂di∂dj 1 Ae − 1 Ae2 ∂F¯e 4(t+ Δt) ∂di ∂Ae ∂dj − 1 Ae2 ∂F¯e 4(t+ Δt) ∂dj ∂Ae ∂di +2F¯e4(t+ Δt) Ae3 ∂Ae ∂dj ∂Ae ∂di − ¯ Fe4(t+ Δt) Ae2 ∂2Ae ∂di∂dj + ∂2F¯e6(t+ Δt) ∂di∂dj yem EIe z +∂F¯e6(t+ Δt) ∂di ∂yme ∂dj 1 EIe z (48) −∂F¯e6(t+ Δt) ∂di yem EIe2 z ∂Ize ∂dj + ∂F¯e6(t+ Δt) ∂dj 1 EIe z ∂yme ∂di − ∂Ize ∂dj ¯ Fe6(t+ Δt) EIe2 z ∂yme ∂di + ¯ Fe6(t+ Δt) EIe z ∂2yem ∂di∂dj −∂F¯e6(t+ Δt) ∂dj ye m EIe2 z ∂Ie z ∂di − ∂ye m ∂dj ¯ Fe 6(t+ Δt) EIe2 z ∂Ie z ∂di + ∂Ie z ∂dj 2F¯e 6(t+ Δt)yem EIe3 z ∂Ie z ∂di − ¯ Fe 6(t+ Δt)yme EIe2 z ∂2Ie z ∂di∂dj
Further differentiating Eq. (36) with respect to the design variabledj, we have
∂2σeMx(t+ Δt) ∂di∂dj = ∂2F¯eM1(t+ Δt) ∂di∂dj 1 Ae− 1 Ae2 ∂F¯eM1(t+ Δt) ∂di ∂Ae ∂dj − 1 Ae2 ∂F¯eM1(t+ Δt) ∂dj ∂Ae ∂di +2F¯eM1(t+ Δt) Ae3 ∂Ae ∂dj ∂Ae ∂di − ¯ Fe M1(t+ Δt) Ae2 ∂2Ae ∂di∂dj + ∂2F¯e M3(t+ Δt) ∂di∂dj ye m EIe z +∂F¯eM3(t+ Δt) ∂di ∂ye m ∂dj 1 EIe z −∂F¯eM3(t+Δt) ∂di ye m EIe2 z ∂Ie z ∂dj+ ∂F¯e M3(t+Δt) ∂dj 1 EIe z ∂ye m ∂di − ∂Ie z ∂dj ¯ Fe M3(t+Δt) EIe2 z ∂ye m ∂di + ¯ Fe M3(t+Δt) EIe z ∂2ye m ∂di∂dj −∂F¯eM3(t+ Δt) ∂dj yme EIe2 z ∂Ize ∂di − ∂yem ∂dj ¯ FeM3(t+ Δt) EIe2 z ∂Ize ∂di +∂Ize ∂dj 2F¯e M3(t+ Δt)yem EIe3 z ∂Ie z ∂di − ¯ Fe M3(t+ Δt)yem EIe2 z ∂2Ie z ∂di∂dj (49)
Further differentiating Eq. (37) with respect to the design variabledj, we obtain
∂2τe ixy(t+ Δt) ∂di∂dj = ∂2F¯e 2(t+ Δt) ∂di∂dj Sze∗max de4Ie z +∂F¯e2(t+ Δt) ∂di ∂Se∗zmax ∂dj 1 de4Ie z −∂F¯e2(t+ Δt) ∂di ∂de 4 ∂dj Sze∗max de42Ie z −∂F¯e2(t+ Δt) ∂di ∂Ize ∂dj Se∗zmax de 4Ize2 +∂2Sze∗max ∂di∂dj ¯ Fe2(t+ Δt) de 4Ize +∂Se∗zmax ∂di ∂F¯e2(t+ Δt) ∂dj 1 de 4Ize −∂Sze∗max ∂di ∂de 4 ∂dj ¯ Fe 2(t+ Δt) de2 4 Ize −∂Sze∗max ∂di ∂Ie z ∂dj ¯ Fe 2(t+ Δt) de 4Ize2 − ∂2de4 ∂di∂dj ¯ Fe 2(t+ Δt)Sze∗max de2 4 Ize −∂de4 ∂di ∂F¯e 2(t+ Δt) ∂dj Sze∗max de2 4 Ize −∂de4 ∂di ∂Sze∗max ∂dj ¯ Fe 2(t+ Δt) de2 4 Ize +∂de4 ∂di ∂de 4 ∂dj 2F¯e 2(t+ Δt)Sze∗max de3 4 Ize +∂de4 ∂di ∂Ize ∂dj ¯ Fe2(t+ Δt)Sze∗max de2 4 Ize2 − ∂2Ize ∂di∂dj ¯ Fe2(t+ Δt)Sze∗max de 4Ize2 −∂Ize ∂di ∂F¯e2(t+ Δt) ∂dj Sze∗max de 4Ize2 −∂Ize ∂di ∂Sze∗max ∂dj ¯ Fe 2(t+ Δt) de 4Ize2 +∂Ize ∂di ∂de 4 ∂dj ¯ Fe 2(t+ Δt)Sze∗max de2 4 Ize2 +∂Ize ∂di ∂Ie z ∂dj 2F¯e 2(t+ Δt)Sze∗max de 4Ize3 (50)
Further differentiating Eq. (38) with respect to the design variabledj, we have
∂2τe jxy(t+ Δt) ∂di∂dj = ∂2F¯e 5(t+ Δt) ∂di∂dj Sze∗max de 4Ize +∂F¯e5(t+ Δt) ∂di ∂Sze∗max ∂dj 1 de 4Ize −∂F¯e5(t+ Δt) ∂di ∂de 4 ∂dj Sze∗max de2 4 Ize −∂F¯e5(t+ Δt) ∂di ∂Ize ∂dj Se∗zmax de 4Ize2 +∂2Sze∗max ∂di∂dj ¯ Fe5(t+ Δt) de 4Ize +∂Se∗zmax ∂di ∂F¯e5(t+ Δt) ∂dj 1 de 4Ize
−∂Sze∗max ∂di ∂de 4 ∂dj ¯ Fe 5(t+ Δt) de42Ie z −∂Sze∗max ∂di ∂Ie z ∂dj ¯ Fe 5(t+ Δt) de4Ie2 z − ∂2de4 ∂di∂dj ¯ Fe 5(t+ Δt)Sze∗max de42Ie z −∂de4 ∂di ∂F¯e5(t+ Δt) ∂dj Sze∗max de2 4 Ize −∂de4 ∂di ∂Sze∗max ∂dj ¯ Fe5(t+ Δt) de2 4 Ize +∂de4 ∂di ∂de4 ∂dj 2F¯e 5(t+ Δt)Sze∗max de3 4 Ize +∂de4 ∂di ∂Ie z ∂dj ¯ Fe 5(t+ Δt)Sze∗max de2 4 Ize2 − ∂2Ize ∂di∂dj ¯ Fe 5(t+ Δt)Sze∗max de 4Ize2 −∂Ize ∂di ∂F¯e 5(t+ Δt) ∂dj Sze∗max de 4Ize2 −∂Ize ∂di ∂Sze∗max ∂dj ¯ Fe 5(t+ Δt) de 4Ize2 +∂Ize ∂di ∂de 4 ∂dj ¯ Fe 5(t+ Δt)Sze∗max de2 4 Ize2 +∂Ize ∂di ∂Ie z ∂dj 2F¯e 5(t+ Δt)Sze∗max de 4Ize3 (51)
Further differentiating Eq. (39) with respect to the design variabledj, we obtain
∂2τe Mxy(t+Δt) ∂di∂dj = ∂2F¯eM2(t+Δt) ∂di∂dj Sze∗max de 4Ize +∂F¯eM2(t+Δt) ∂di ∂Sze∗max ∂dj 1 de 4Ize −∂F¯eM2(t+Δt) ∂di ∂de4 ∂dj Sze∗max de2 4 Ize −∂F¯eM2(t+ Δt) ∂di ∂Ie z ∂dj Sze∗max de 4Ize2 +∂2Sze∗max ∂di∂dj ¯ Fe M2(t+ Δt) de 4Ize +∂Se∗zmax ∂di ∂F¯e M2(t+ Δt) ∂dj 1 de 4Ize −∂Sze∗max ∂di ∂de 4 ∂dj ¯ Fe M2(t+ Δt) de2 4 Ize −∂Sze∗max ∂di ∂Ie z ∂dj ¯ Fe M2(t+ Δt) de 4Ize2 − ∂2de4 ∂di∂dj ¯ Fe M2(t+ Δt)Sze∗max de2 4 Ize −∂de4 ∂di ∂F¯eM2(t+ Δt) ∂dj Sze∗max de2 4 Ize −∂de4 ∂di ∂Sze∗max ∂dj ¯ FeM2(t+ Δt) de2 4 Ize +∂de4 ∂di ∂de4 ∂dj 2F¯e M2(t+ Δt)Sze∗max de3 4 Ize +∂de4 ∂di ∂Ie z ∂dj ¯ Fe M2(t+ Δt)Sze∗max de2 4 Ize2 − ∂2Ize ∂di∂dj ¯ Fe M2(t+ Δt)Sze∗max de 4Ize2 −∂Ize ∂di ∂F¯e M2(t+ Δt) ∂dj Se∗zmax de 4Ize2 −∂Ize ∂di ∂Sze∗max ∂dj ¯ Fe M2(t+ Δt) de 4Ize2 +∂Ize ∂di ∂de 4 ∂dj ¯ Fe M2(t+ Δt)Se∗zmax de2 4 Ize2 +∂Ize ∂di ∂Ie z ∂dj 2F¯e M2(t+ Δt)Sze∗max de 4Ize3 (52)
2.1.3. Computation procedure of thefirst and second derivatives of dynamic displacement and stress
In this work, we suppose that the initial conditions arex(0) =0,˙x(0) =0,x¨(0) =0, and the dynamic responses
(nodal displacements and stresses), theirfirst and second derivatives with respect to design variables are equal to
zero.
Section 2.1.2 gives the formulas for calculating thefirst and second derivatives of the dynamic response. This
section provides the detailed computation procedure as follows.
Procedure of calculating dynamic responsefirst and second derivatives:
Step 1 Initial calculations:
Step 1.1x(0) = 0,˙x(0) = 0,x¨(0) = 0,σixe (0) = 0,σjxe (0) = 0,σeMx(0) = 0,τixye (0) = 0,τjxye (0) = 0,
τMxye (0) = 0. Step 1.2∂x(0) ∂di = 0, ∂˙x(0) ∂di = 0, ∂¨x(0) ∂di = 0, ∂σeix(0) ∂di = 0, ∂σjxe (0) ∂di = 0, ∂σeMx(0) ∂di = 0, ∂τixye (0) ∂di = 0, ∂τe jxy(0) ∂di = 0, ∂τMxye (0) ∂di = 0. Step 1.3∂2x(0) ∂di∂dj = 0, ∂2˙x(0) ∂di∂dj = 0, ∂2x¨(0) ∂di∂dj = 0, ∂2σixe(0) ∂di∂dj = 0, ∂2σejx(0) ∂di∂dj = 0, ∂2σeMx(0) ∂di∂dj = 0, ∂2τe ixy(0) ∂di∂dj = 0, ∂2τe jxy(0) ∂di∂dj = 0, ∂2τMxye (0) ∂di∂dj = 0.
Step 1.4 SetΔt.
Step 1.5 Compute integral constants:
a0= 1 βΔt2, a1= δ βΔt, a2= 1 βΔt, a3= 1 2β −1, a4= δ β −1, a5= Δt 2 δ β −2 , a6= Δt(1−δ), a7=δΔt.
where integral parametersδ0.5 andβ= 0.25 (0.5 +δ)2.
Step 1.6 Solve Eq. (15)⇒K∗.
Step 2 Calculations for each time stept+ Δt:
Step 2.1 Solve Eq. (14)⇒x(t+ Δt).
Step 2.2 Solve Eq. (17)⇒¨x(t+ Δt), solve Eq. (21)⇒σe
ix(t+ Δt), solve Eq. (22)⇒σjxe (t+ Δt),
solve Eq. (23)⇒σeMx(t+ Δt), solve Eq. (24)⇒τixye (t+ Δt), solve Eq. (25)⇒τjxye (t+ Δt),
and solve Eq. (26)⇒τMxye (t+ Δt).
Step 2.3 Solve Eq. (18)⇒ ˙x(t+ Δt).
Step 2.4. Solve Eq. (27)⇒ ∂x(t+Δt)
∂di .
Step 2.5 Solve Eq. (30)⇒ ∂¨x(t+Δt)
∂di , solve Eq. (34)⇒
∂σixe(t+Δt)
∂di ,
solve Eq. (35)⇒∂σjxe (t+Δt)
∂di , solve Eq. (36)⇒
∂σeMx(t+Δt)
∂di ,
solve Eq. (37)⇒∂τixye (t+Δt)
∂di , solve Eq. (38)⇒
∂τjxye (t+Δt)
∂di ,
and solve Eq. (39)⇒ ∂τMxye (t+Δt)
∂di .
Step 2.6 Solve Eq. (31)⇒ ∂˙x(t+Δt)
∂di .
Step 2.7 Solve Eq. (40)⇒ ∂2x(t+Δt)
∂di∂dj .
Step 2.8 Solve Eq. (43)⇒ ∂2x¨(t+Δt)
∂di∂dj , solve Eq. (47)⇒
∂2σixe(t+Δt)
∂di∂dj ,
solve Eq. (48)⇒∂2σejx(t+Δt)
∂di∂dj , solve Eq. (49)⇒
∂2σMxe (t+Δt)
∂di∂dj ,
solve Eq. (50)⇒∂2τixye (t+Δt)
∂di∂dj , solve Eq. (51)⇒
∂2τjxye (t+Δt)
∂di∂dj ,
and solve Eq. (52)⇒ ∂2τMxye (t+Δt)
∂di∂dj .
Step 2.9 Solve Eq. (44)⇒ ∂2˙x(t+Δt)
∂di∂dj .
Step 3 Repetition for the next time step. Replacetbyt+ Δtand implement steps 2.1 to 2.9 for the next time
step.
2.2. First and second derivatives of structural mass
We use structural mass as the objective function in optimization. The objective function or the structural mass can be expressed as w(d) = N e=1 ρAele (53)
The first derivatives of the structural mass are obtained by differentiating Eq. (53) with respect to the design
variables, ∂w(d) ∂di = N e=1 ρle∂A e ∂di (54)
The second derivatives of the structural mass can be obtained by further differentiating Eq. (54) with respect to the design variables,
∂2w(d) ∂di∂dj = N e=1 ρle ∂ 2Ae ∂di∂dj (55)
3. Optimization mathematical model
In general, we aim to minimize the total massw(d)of the structure. At the same time, the normal stresses, shear
stresses, and nodal displacements should satisfy the constraints in the duration of transient loads. We formulate the optimization problem of the structures subjected to transient loads as follows.
Findd minw(d) s.t.−[σ]σixe+(d, t)[σ] (e= 1,2,· · ·, N, t∈[0,Γ]) −[σ]σe−ix (d, t)[σ] (e= 1,2,· · ·, N, t∈[0,Γ]) −[σ]σejx+(d, t)[σ] (e= 1,2,· · ·, N, t∈[0,Γ]) −[σ]σe−jx (d, t)[σ] (e= 1,2,· · ·, N, t∈[0,Γ]) −[σ]σeMx+ (d, t)[σ] (e= 1,2,· · ·, N, t∈[0,Γ]) −[σ]σe−Mx(d, t)[σ] (e= 1,2,· · ·, N, t∈[0,Γ]) −[τ]τixye (d, t)[τ] (e= 1,2,· · ·, N, t∈[0,Γ]) −[τ]τjxye (d, t)[τ] (e= 1,2,· · ·, N, t∈[0,Γ]) −[τ]τMxye (d, t)[τ] (e= 1,2,· · ·, N, t∈[0,Γ]) −[xk]xk(d, t)[xk] (k= 1,2,· · ·, Nf) dJ dJ d¯J (J = 1,2,· · ·,4N) (56)
where ‘+’ and ‘−’ are tension and compression, respectively.[σ]is allowable normal stress.[τ]is allowable shear
stress. Γis the duration of transient loads. Nf is the number of degree of freedom.[xk]is allowable displacement
on thekth degree of freedom.dJis the lower limit of theJth design variable.d¯Jis the upper limit of theJth design
variable.
Normalizing the constraints of the optimal model Eq. (56), we obtain the new equivalent mathematic model as follows. Findd minw(d) s.t. ge(d, t) = σ e+ ix(d,t) [σ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+N(d, t) =−σ e+ ix(d,t) [σ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+2N(d, t) =σ e− ix(d,t) [σ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+3N(d, t) =−σe−ix(d,t) [σ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+4N(d, t) =σ e+ jx(d,t) [σ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+5N(d, t) =−σ e+ jx(d,t) [σ] −10 (e= 1,2,· · ·, N;t∈[0,Γ])
ge+6N(d, t) =σ e− jx(d,t) [σ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+7N(d, t) =−σ e− jx(d,t) [σ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+8N(d, t) =σ e+ Mx(d,t) [σ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+9N(d, t) =−σ e+ Mx(d,t) [σ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+10N(d, t) =σ e− Mx(d,t) [σ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+11N(d, t) =−σ e− Mx(d,t) [σ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+12N(d, t) =τ e ixy(d,t) [τ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+13N(d, t) =−τ e ixy(d,t) [τ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+14N(d, t) =τ e jxy(d,t) [τ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+15N(d, t) =−τjxy(de [ ,t) τ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+16N(d, t) =τMxy(de [ ,t) τ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) ge+17N(d, t) =−τ e Mxy(d,t) [τ] −10 (e= 1,2,· · ·, N;t∈[0,Γ]) gk+18N(d, t) =xk(d[xk],t)−1≤0 (k= 1,2,· · ·, Nf) gk+Nf+18N(d, t) =−xk[(dxk],t)−10 (k= 1,2,· · ·, Nf) gJ(d) =dJ¯ dJ −10 (J = 1,2,· · ·,4N) gJ+4N(d) = 1−dJdJ 0 (J= 1,2,· · ·,4N) (57)
4. Transformation of mathematical model
The key feature of the transformation method is to transform a constrained problem into an unconstrained problem. Thus, we minimize only one function in the transformation method. This is an attractive aspect in that many time-dependent constraints and an objective function can be merged into a single function. The representatives of the transformation method are the augmented Lagrange multiplier method [16] and the exterior penalty function method [20] in structure optimal design under dynamic loads. However, the augmented Lagrange multiplier function and the exterior penalty function are discontinuous functions, therefore, the gradient and Hessian matrix calculations
of these functions are difficult when the direct differentiation method is employed to obtain thefirst and second
derivatives. Compared to the augmented Lagrange multiplier function and the exterior penalty function, the interior penalty function is a continuous function, so the gradient and Hessian matrix calculations of the interior penalty
function are relatively easy when the direct differentiation method is used to obtain thefirst and second derivatives.
The interior penalty function method requires a feasible initial design point. Typically, it may be difficult to obtain
a feasible initial design in a complex problem. However, in structural optimization problems, a feasible design point can be found in the structures with the large cross-sectional areas. Therefore, in this paper the interior penalty function is employed to transform the inequality constraint optimization problem.
4.1. Interior penalty function method
In this paper£‹the inequality constraint optimal mathematic model Eq. (57) is converted to a sequence of appro-priately formed unconstrained integral mathematic model using the interior penalty function method. The interior penalty function method is adopted as follows.
P(d, rk) =w(d)−rk ⎛ ⎝2Nf+18N J=1 Γ 0 1 gJ(d, t)dt+ 8N I=1 1 gI(d) ⎞ ⎠ (58)
In Eq. (58), penalty parameterrk is a sequence of numbers which are degressive. Whenrk →0, the minimum
of penalty functionP(d, rk)approaches the minimum of the constraint problem. So the solution of the inequality
constraint optimization model, Eq. (57), is transformed into a sequence of unconstraint problems:
Find d min P(d, rk) =w(d)−rk ⎛ ⎝2Nf+18N J=1 Γ 0 1 gJ(d, t)dt+ 8N I=1 1 gI(d) ⎞ ⎠ (59)
Initial penalty parameterr1can be calculated by the following equation,
r1 ⎛ ⎝2Nf+18N J=1 Γ 0 1 gJ(d0, t)dt+ 8N I=1 1 gI(d0) ⎞ ⎠= p0 100w(d0) (60)
whered0is the initial design point andp0=1∼50. In this work, we choosep0=50.
The penalty parameterrkdecreases according to the following rule:
rk+1= rk
c (61)
wherec= 10∼50andc=10 in this work. kis the number of penalty parameter which will be used in the process
of search.
4.2. Calculation of gradient and Hessian matrix of interior penalty function
Now we calculate thefirst and second derivatives of the penalty function with respect to the structural design
variables. The time step and duration of dynamic loads areΔtandΓ, respectively. Leta= ΔΓ
t.
Thefirst derivatives of penalty function can be obtained by differentiating Eq. (58) with respect to the design
variabledi, ∂P(d, rk) ∂di = ∂w(d) ∂di +rk ⎛ ⎝2Nf+18N J=1 Γ 0 1 gJ2(d, t) ∂gJ(d, t) ∂di dt+ 8N I=1 1 g2I(d) ∂gI(d) ∂di ⎞ ⎠ (62)
The second derivatives of penalty function is calculated by further differentiating Eq. (62) with respect to the
design variabledj, ∂2P(d, rk) ∂di∂dj = ∂2w(d) ∂di∂dj +rk 2Nf+18N J=1 Γ 0 −2 gJ3(d, t) ∂gJ(d, t) ∂dj ∂gJ(d, t) ∂di + 1 gJ2(d, t) ∂2gJ(d, t) ∂di∂dj dt +rk 8N I=1 −2 g3I(d) ∂gI(d) ∂dj ∂gI(d) ∂di (63)
The integral terms in Eqs (58), (59), (60), (62), (63) are computed by using the trapezoidal form integral formula:
Γ 0 1 gJ(d, t)dt= a−1 z=0 Δt 2 1 gJ(d, zΔt)+ 1 gJ(d,(z+ 1) Δt) (64)
Γ 0 1 g2J(d, t) ∂gJ(d, t) ∂di dt= a−1 z=0 Δt 2 1 gJ2(d, zΔt) ∂gJ(d, zΔt) ∂di + 1 gJ2(d,(z+1) Δt) ∂gJ(d,(z+1) Δt) ∂di (65) Γ 0 −2 gJ3(d, t) ∂gJ(d, t) ∂dj ∂gJ(d, t) ∂di + 1 gJ2(d, t) ∂2gJ(d, t) ∂di∂dj dt= a−1 z=0 Δt 2 −2 gJ3(d, zΔt) ∂gJ(d, zΔt) ∂dj ∂gJ(d, zΔt) ∂di + 1 gc2(d, zΔt) ∂2gJ(d, zΔt) ∂di∂dj + (66) −2 g3J(d,(z+ 1) Δt) ∂gJ(d,(z+ 1) Δt) ∂dj ∂gJ(d,(z+ 1) Δt) ∂di + 1 g2J(d,(z+ 1) Δt) ∂2gJ(d,(z+ 1) Δt) ∂di∂dj
Thefirst and second derivatives of the penalty function with respect to the structural variables are calculated. Then
the gradient and Hessian matrix can be achieved. 5. Solving optimization problems
The inequality constraint optimization model, Eq. (57), is converted into a sequence of the appropriately formed unconstrained integral model, Eq. (59). Marquardt’s method, a gradient-Hessian matrix-based algorithm, is adopted to solve the unconstrained problem, taking advantages that the gradient and Hessian matrixes are fully used in this optimal method. Marquardt’s method combines Cauchy’s and Newton’s methods in a convenient manner that exploits the strengths of both but does require second-order information. The major merit of Marquardt’s method is its simplicity, descent property, excellent convergence rate near the optimum, and absence of a line search. Based on Marquardt’s method, the computation procedure of solving the mathematic model Eq. (56) is as follows.
The computer procedure of solving the mathematic model Eq.(56):
Step 1. Chose the initial feasible design pointd0, calculater1by solving Eq. (60), define convergence criterion
ε1, letk=1.
Step 2. Start from design pointdk−1, solve the mathematic model Eq. (59) with Marquardt’s method to obtain
the optimum designdk.The steps of solving the mathematic model Eq.(59)with Marquardt’s method is
fromStep 2.1. to Step 2.11.:
Step 2.1.Letd(0)k−1=dk−1. Define
MI =maximum number of iterations allowed
ε2=convergence criterion I=identity matrix Step 2.2. Seti= 0.λ(0) = 105. Step 2.3.Calculate∇P d(k−i)1, rk . Step 2.4.Is∇P dk−(i)1, rkε2? Yes: Go to step 2.11. No: Continue. Step 2.5.IsiMI? Yes: Go to step 2.11. No: Continue. Step 2.6.CalculateS d(k−i)1 =−∇2P d(i) k−1, rk +λ(i)I−1∇P d(i) k−1, rk . Step 2.7.Setd(i+1) k−1 =d(k−i)1+S d(k−i)1 . Step 2.8.IsP d(k−i+1)1 , rk < P d(k−i)1, rk ? Yes: Go to step 2.9.