Other uses, including reproduction and distribution, or selling or
licensing copies, or posting to personal, institutional or third party
websites are prohibited.
In most cases authors are permitted to post their version of the
article (e.g. in Word or Tex form) to their personal website or
institutional repository. Authors requiring further information
regarding Elsevier’s archiving and manuscript policies are
encouraged to visit:
ContentslistsavailableatSciVerseScienceDirect
Computers
and
Chemical
Engineering
jo u r n al h om ep a ge :ww w . e l s e v i e r . c o m / l o c a t e / c o m p c h e m e n g
On
the
role
of
the
necessary
conditions
of
optimality
in
structuring
dynamic
real-time
optimization
schemes
Dominique
Bonvin
a,∗,
Bala
Srinivasan
baLaboratoired’Automatique,EcolePolytechniqueFédéraledeLausanne,CH-1015Lausanne,Switzerland bDepartmentofChemicalEngineering,EcolePolytechniqueMontreal,Montreal,Canada
a
r
t
i
c
l
e
i
n
f
o
Articlehistory:
Received28March2012
Receivedinrevisedform9July2012 Accepted12July2012
Available online 2 August 2012 Keywords:
Dynamicreal-timeoptimization Plant-modelmismatch Modelingforoptimization Inputparameterization Plantmodel
Solutionmodel
a
b
s
t
r
a
c
t
Indynamicoptimizationproblems,theoptimalinputprofilesaretypicallyobtainedusingmodelsthat predictthesystembehavior.Inpractice,however,processmodelsareofteninaccurate,andon-linemodel adaptationisrequiredforappropriatepredictionandre-optimization.Inmostdynamicreal-time opti-mizationschemes,theavailablemeasurementsareusedtoupdatetheplantmodel,withuncertainty beinglumpedintoselecteduncertainplantparameters;furthermore,apiecewise-constant parameteri-zationisusedfortheinputprofiles.Thispaperarguesthattheknowledgeofthenecessaryconditionsof optimality(NCO)canhelpdevisemoreefficientandmorerobustreal-timeoptimizationschemes.Ideally, thestructuringdecisionsinvolvetheNCOasfollows:(i)onemeasuresorestimatestheplantNCO,(ii) aNCO-basedinputparameterizationisused,and(iii)modeladaptationisperformedtomeettheplant NCO.ThebenefitofusingtheNCOindynamicreal-timeoptimizationisillustratedinsimulationthrough thecomparisonofvariousschemesforsolvingafinal-timeoptimalcontrolprobleminthepresenceof uncertainty.
© 2012 Elsevier Ltd. All rights reserved.
1. Introduction
Optimizationisimportantinscienceandengineeringasaway offindingthebestsolutions,designsoroperatingconditions. Opti-mizationis typicallyperformed onthebasis ofa mathematical modeloftheobjectofattention.Forexample,engineersmightbe interestedintheoptimaloperationofprocessesthateitheroperate atsteadystateorundergotransientchanges.Theobjectof atten-tion,orreality,iscalledthe“plant”,whereasthe“model”isasetof algebraic,differentialordifferential-algebraicequations.
In practice, optimization is complicated by the presence of uncertaintyintheformofplant-modelmismatchand unknown disturbances. Withoutuncertainty, one could usethemodel at hand,optimizeitnumericallyoff-lineandimplementtheoptimal inputsinanopen-loopfashion.However,becauseofuncertainty, additional informationsuchasuncertainty description or plant measurementsmustbeincluded.Intheformercase,robust opti-mizationcomputesasetofinputsthatguaranteesfeasibilityeither for all possiblerealizations or with a desired probability level, however at theexpense of a conservative solution(Srinivasan, Bonvin, Visser, & Palanki, 2003; Terwiesch, Agarwal, & Rippin, 1994). In the latter case, the inputs are updated in real-time
∗Correspondingauthor.Tel.:+41216933843;fax:+41216932574.
E-mailaddress:dominique.bonvin@epfl.ch(D.Bonvin).
based onmeasurements. Thisis thefield of real-time optimiza-tion,whichislabeledRTOforstaticoptimizationproblems(Marlin &Hrymak,1997)andDRTO fordynamicoptimizationproblems (Biegler,2009).Thispaperdealswithtwomajorimplementation issuesinDRTO,namely,modelqualityandcomputationalaspects. Theissueofmodelqualityraisesanimportantquestion:Does goodperformancerequireagoodmodel?Thisisnotnecessarily thecaseforcontrol,sinceerrorsresultingfromapoormodelcan beoffsetbytheactionoffeedback.Inoptimization,without feed-backtomakeupformodelingerrors,themodelneedstorepresent therealityaccurately,inparticulartheoptimalityconditionsofthe plant.Thesituationisslightlydifferentinreal-timeoptimization sincethemeasurementsavailableon-linerepresentsomeformof feedback.However,thisfeedbackisonlypartialasitistypically limitedtooutputinformation.Furthermore,itisimportanttoadapt themodelappropriately,thatis,therewhereitmattersmostfor thepurposeofoptimization.Theseissues ofmeasurement loca-tionandinputupdateinthecontextofimperfectmodelarecrucial forreachingoptimality.Itisarguedinthispaperthatthe neces-saryconditionsofoptimality(NCO)predictedbythemodelneed tomatchthoseoftheplantforplantoptimality.Wewilldiscussed howtheNCOmeasurementscanbeincorporatedinamodelsoas tobemostusefulforoptimization.
Thecomputationalaspectsarealsocrucialforimplementation. Avery reliableoptimizationschemeismodelpredictivecontrol (MPC), whichincorporatesstatefeedback,usesa receding hori-zonandcarriesouttheoptimizationrepeatedlyateachsampling 0098-1354/$–seefrontmatter© 2012 Elsevier Ltd. All rights reserved.
time(Rawlings&Mayne,2009).MPCwasinitiallydevelopedto trackareferencetrajectorybyminimizationofaquadraticerror term.Ithasrecentlybeenextendedto“economicMPC”thatuses anon-quadraticcost function(Heidarinejad, Liu,&Christofides, 2012;Rawlings&Amrit,2009).Furthermore,therehasbeen con-siderableeffortsinrecentyearstospeedupthecomputationsby formulatingconvexoptimizationproblemsand alsousing algo-rithmsthatexploitthestructure oftheproblem(Diehl,Ferreau, &Haverbeke,2009;Richter,Morari,&Jones,2011;Wang&Boyd, 2010).Ontheotherhand,recent trendsinDRTOhaveincluded attemptstomove theheavycomputations off-line,where time andcomputationalpoweraremoreavailable,andlimittheon-line operationstoquickdecisionsandeasycomputations.Forexample, multi-parametricprogramminggeneratesoff-linealookuptableof controllaws,whicharethenusedon-linebasedontheestimated statesoftheplant(Bemporad,Morari,Dua,&Pistikopoulos,2002; Pistikopoulos,Georgiadis,&Dua,2007;Zeilinger,Jones,&Morari, 2011).Also,“advancedstepNMPC”strategieshavebeenproposed, whichsolvethedetailedoptimizationprobleminbackgroundand applysensitivity-basedupdateon-line(D’Amato,Kumar, Lopez-Negrete,&Biegler,2012;Zavala&Biegler,2009).Anotherapproach isthenonlinearreal-timeiterationscheme,whichusesa continu-ationNewton-typeframeworkandsolvesoneQPateachiteration (Diehl, Bock, &Schlöder, 2005; Diehl et al., 2002).This allows formultiple activeset changesand thus ensures that the non-linearMPC algorithmcannotperform worsethan a linearMPC controller.YetadifferentapproachisNCOtracking,whichuses aNCO-based parameterizationof theinputprofiles todesigna multivariable feedback schemethat tracksthe first-order opti-malityconditions,therebypushingthesystemtowardoptimality (Srinivasan&Bonvin,2007).
Thispaperdealswiththemodel-qualityissueinDRTO.Inthe presenceofsignificantplant-modelmismatch,theuseofafixed nominalmodelistypicallyinsufficienttodrivetheplantto opti-mality. With MPC for example, the estimated states are often inaccurate,andone would needtoupdatethe model,which is difficulttodoinclosed-loopoperationduetotheso-calleddual controlproblem(Aström&Wittenmark,1995).Thisworkadopts theviewpointthat,inreal-timeoptimization,themodelisa vehi-cletoprocessplantmeasurementsandcomputetheoptimalinputs. Thisstepinvolvestwomajordecisions,namely,thechoiceofthe measuredquantitiesandthechoiceofafinitenumberofdecision variablesviainputparameterization.Notethatthesechoicescan benefitfromknowledgeoftheNCOsincetheNCOareintimately linkedtoplantoptimality.Thestructure oftheoptimalsolution andthecorrespondingNCOcanbedeterminedoff-lineby numeri-caloptimization.Thesemeasurementandinput-parameterization issuesarebrieflyaddressednext.
Measurements anduncertaintydescription.Themeasurements aretypically the plantoutputs yplant.The uncertainty, which is observedasthedifferencebetweentheplantmeasurementsand thecorrespondingmodelpredictions,canberepresentedas para-metricvariations of theplant model. Alternatively, if the NCO elementscanbemeasured,sayyNCO,themodeluncertaintycanbe expressedasthedifferencebetweenthemeasuredand the pre-dictedyNCO values. It is interesting tonotice the closerelation betweenthetype ofmeasurements(the plantoutputsyplant vs. theNCOelementsyNCO)andtheuncertaintydescription(theplant parametersplantvs.theNCOdeviationsNCO).
Parameterizationandupdateoftheinputs.Thetraditionalway of parameterizing infinite-dimensional inputs is control vector parameterization(CVP),wherebytheinputsareapproximatedas piecewise-constantprofiles.Themain advantageisuniversality, thatis,anysolutioncanbecloselyapproximatedbyintroducinga sufficientnumberofpieces(barringcertainnumericalissuessuch asringingarounddiscontinuities).However,CVPtypicallycontains
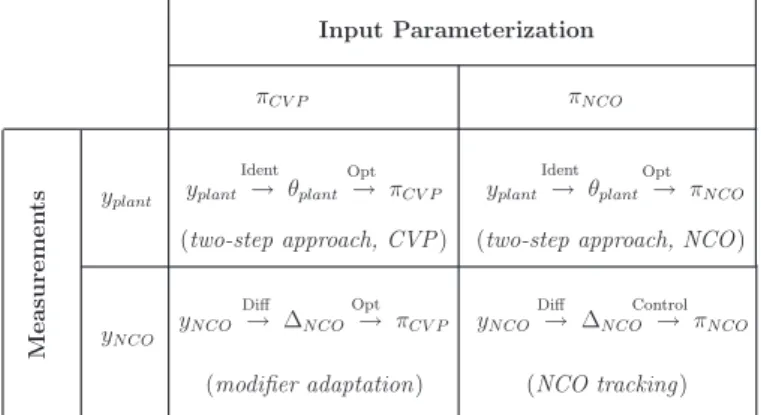
Fig. 1.Measurement and input-parameterization features of various DRTO schemes.Themeasuredplantoutputsarelabeledyplant,themeasuredNCOelements
yNCO;theinputsareparameterizedviacontrolvectorparameterization,CVP,orvia
theelementsoftheNCO,NCO.Plant-modelmismatchcanbeabsorbedintheplant
modelparametersplantorviaanadditivedisturbancetotheNCOvalues,NCO.
“Ident”meanstheuseofparameteridentification,“Diff”thecomputationofa dif-ference,“Opt”theuseofnumericaloptimization,and“Control”theuseoffeedback control.
alargenumberofpiecewise-constantinputvalues,denotedhere
CVP.Incontrast,aparsimoniousinputparameterization,NCO,can beobtainedfrom theknowledge oftheNCO, that is, theinput elementscorrespondtoswitchingtimesbetweenarcsandinput valuesassociatedwithcertainarcs.Thewaytheinputsare param-eterizedimpactsonthewaythereareupdated.WithCVP,theonly efficientway tocomputetheinputsis throughnumerical opti-mization.WithNCO,thefewinputparameterscanbeadjustedvia feedbackcontroltoregulatethedeviationNCOtozero.
VariousDRTOschemesarepossiblebasedonthechoiceofthe measurementandinput-parameterizationoptions,someofwhich areillustratedinFig.1anddiscussednext.
•Inthe“two-stepapproach”ofrepeatedparameteridentification andperformance optimization,themeasurementsareusedto adaptthemodelparametersandestimatethecurrentstates.The estimatedstatesserveasinitialconditionsfortheoptimization thatisrepeatedon-linewiththeupdatedmodel(Chen&Joseph, 1987;Eaton&Rawlings,1990).Theinputparameterizationisof theCVPtype.
•Inthemodifier-adaptationapproach,modifiertermsareadded tothecostandconstraintfunctions.UponmeasurementofyNCO, themodifiersareupdatedinorderforthemodelandtheplant tohave matching first-order optimalityconditions (Chachuat, Srinivasan,&Bonvin,2009;Marchetti,Chachuat,&Bonvin,2007). TheseschemesusethemeasurementsyNCOandtheinputsCVP foroptimization.
•Itisalsopossibletoperformnumericaloptimizationusinga NCO-basedinputparameterization.Suchaschemehasbeendeveloped by Schlegel and Marquardt(2006a) and applied toan indus-trialpolymerizationprocessinSchlegelandMarquardt(2006b). ThecorrespondingDRTOschemeconsistsinmeasuringyplantand updatingthemodelparametersaccordingly,followedby numer-icaloptimizationusingtheNCOparameterization.
•Finally,NCOtrackingusesthemeasurementsofyNCOtoupdate
NCOusingfeedbackcontroltomeettheplantNCO(Srinivasan& Bonvin,2007).
Thispaperconsiderstheimplementationofoptimalcontrolin thepresenceofsignificantuncertaintyintheformofplant-model mismatch,whichrequiressomeformofadaptationbasedonplant measurements.Three possibleadaptationstrategiesare consid-ered,namelyadaptationoftheprocessmodel,adaptationofthe
costandconstraintfunctions,anddirectadaptationoftheinputs.A similarinvestigationhasalreadybeenproposedforthestatic opti-mizationcase(Chachuatetal.,2009).Notealsothattheemphasis inthepresentstudyisnotoncomputationalaspectsasthishas beenthecaseinnumerousrecentinvestigations involving non-linearMPC (Diehl et al.,2009),butrather onalternativesways tocompensateforplant-modelmismatchanddrivetheplantto optimality.
Thepaperisorganizedasfollows.Section2formulatesthe opti-mizationproblemandpresentsthecorrespondingNCO.Section3
addressesnumericaloptimizationusingaplantmodelandtouches uponthetopicsof“modeladequacy”and“modelingfor optimiza-tion”.Optimizingcontrolusingasolutionmodelispresentedin
Section4.Section5discussesthechoiceofaDRTOschemewith regardtobothmeasurementsandinputparameterization.The var-iousideasdevelopedinthispaperareillustratedthroughasimple dynamicexampleinSection6,andSection7concludesthepaper.
2. Dynamicoptimizationproblem
2.1. Problemformulation
Considertheconstraineddynamicoptimizationproblemswith finiteoperationaltime,where theobjectiveistodeterminethe inputprofilesthatoptimizeafinal-timecostfunction.Inadditionto constraintscorrespondingtothedynamicsystemequations,there mightbe pathconstraints(involving inputs and states)as well
asterminalconstraints.Inputboundsaredictatedbyactuator lim-itations,whilestate-dependentconstraintstypicallyresult from safetyandoperabilityconsiderations.Terminalconstraintsusually arisefromqualityorperformanceconsiderations.
Sincetheinputsareinfinitedimensional,numericalsolutionof theoptimizationproblemrequiresinputparameterization.Here theinputsareparameterizedusingasetoffiniteparametersand numericaloptimizationthencomputestheoptimalvaluesof.
Themainchallengeaddressedin thispaperisthat of uncer-tainty,thatis,theplantdoesnotquitebehaveaspredictedbythe model.Onewaytoincorporatetheuncertaintyinthemodelisvia thesetofuncertainparameters.Thedynamicoptimization prob-lemcanbeformulatedmathematicallyasfollows(Bryson&Ho, 1975;Kirk,1970): min (x(tf),,) (1) s.t. x˙(t)=F(x(t),u(t),,), x(0)=x0(,) (2) S(x(t),u(t),,)≤0 (3) T(x(tf),,)≤0 (4) [u(t),]=U(t,x,,), (5)
whereisthefinal-timecostfunctionaltobeminimized,xthe stateswiththeknowninitialconditionsx0,utheinputs,the
time-invariantdecisionvariables,Sthepathconstraints,Ttheterminal constraints,Fthesystemdynamics,theuncertainplantmodel parameters,Utheinputparameterization,theinputparameters, andtfthefinaltimethatisfinitebutcanbeeitherfixedorfree.If
tfisfree,itispartof.Notethattheinitialconditionscanalsobe consideredasdecisionvariables.
ThesolutionofProblems(1)–(5)istypicallydiscontinuousand consistsofseveralintervalsorarcs(Srinivasan,Palanki,&Bonvin, 2003).Yet,theinputprofilesarecontinuousanddifferentiablein each interval.Eachinterval ischaracterizedbyadifferentsetof activepathconstraints,thatis,thissetchangesbetweentwo suc-cessiveintervals.
2.2. Necessaryconditionsofoptimality
Letusdefinethefollowingfunctions:
H(t)=T(t)F(x(t),u(t),,)+T(t)S(x(t),u(t),,) (6) ˚(tf)=(x(tf),,)+ TT(x(tf),,) (7) (tf)=˚(tf)+
tf 0 H(t)dt (8) ˙ T(t)=−∂
H∂
x(t), T(t f)=∂
˚(tf)∂
x(tf) , (9)whereH(t)istheHamiltonianfunction,˚(tf)theaugmented ter-minal cost, (tf) the total terminal cost, (t)=/ 0 the adjoint variables(Lagrangemultipliersforthesystemequations),(t)≥0 theLagrange multipliersfor thepath constraints,and ≥0the Lagrangemultipliersfortheterminalconstraints.
The NCOfor optimization problem (1)–(4), that is, without parameterizationoftheinput,canbewrittenasfollows(Bryson &Ho,1975;Srinivasan,Palanki,etal.,2003):
l
a
n
i
m
r
e
T
h
t
a
P
Constr
aints
μ
T(
t
)
S
x
(
t
)
,
u
(
t
)
,
ρ,
θ
=
0
,
μ
(
t
)
≥
0
ν
TT
x
(
tf
)
,
ρ,
θ
=
0
,
ν
≥
0
Sensiti
vities
∂H
∂u
(
t
)
=
0
∂
Ψ(
∂ρ
tf
)
=
0
(10)
3. Numericaloptimizationusingaplantmodel
Thebestrepresentativeofthisclassofmethodsforthecaseof plant-modelmismatchisthetwo-stepapproach,which(i)usesa plantmodelandoutputmeasurementstoidentifyuncertainmodel parametersand (ii)optimizetheupdated modelusingCVP.The plantmodelisoftheform:
˙
x(t)=F(x(t),u(t),,), ymodel(t)=G(x(t),u(t),,), (11)
withthestatevectorxandtheoutputvariablespredictedbythe modelymodel.Afterabriefdescriptionofthemodel-building pro-cedure,thetwoconceptsof“modeladequacy”and“modelingfor optimization”willbedeveloped.Specialattentionwillbepaidto thechoiceandadaptationoftodealwithuncertainty.
3.1. Modelbuilding
Toconstructamathematicalmodel,themodelertypicallyuses bothpriorknowledgeandmeasurementsfromtheplant.The mod-elergoesthroughseveralstepsthatinclude(i)abstractionfrom therealitytodefinethe“system”,(ii)simplificationtoarriveat amathematicalmodelofmanageablecomplexity,(iii)parameter identificationtofitthemodeltotheplant,and(iv)modelvalidation toensurethatthemodelwillbeusefulforitsintendedgoal.Since thelaterstepsinfluencetheearlyones,thisprocedureistypically iterative.
Modelidentificationandvalidationaretypicallydoneby com-paring the model prediction ymodel(t) with the observed plant outputs yplant(t).However,parameteridentificationisa difficult taskinthepresenceofstructuralplant-modelmismatch,thatis,
whentheplantdoesnotbelongtothemodelset(Ljung,1999). Inthiscase,parameteridentificationrequiresappropriate exper-imentaldesign(Montgomery,2005)andpersistencyofexcitation (Walter&Pronzato,1997).
Themodelvalidationstepisveryimportant.Howcanoneensure thatthemodelwillbeadequateforsolvingtheoptimization prob-lemathand?ThecriterionJid=y
model(t)−yplant(t)isconvenient becausetheoutputsare,bydefinition,available.Furthermore,itis fullyjustifiedifthemainpurposeofthemodelistopredictthe out-puts,forexampleinasimulationstudy.Butisitstilljustifiedifthe modelisusedforoptimization?Thisquestionisaddressednext.
3.2. Modeladequacy
It is well known that the two-step approach of repeated parameteridentificationandperformanceoptimizationworkswell provided that (i) there is no structural plant-model mismatch, that is, the plant lies in the model set and (ii) the operating conditionsyieldsufficientexcitationforalltheuncertainmodel parameters to be estimated (Chen & Joseph, 1987; Marlin & Hrymak,1997).Iftheseconditionsaresatisfied,convergenceto theplant optimum can beachieved in one iteration (Forbes & Marlin,1996). Yet,these conditions are rarely metin practice. Regardingthelattercondition,inparticular,thesituationis some-what similartothat found in theareaof systemidentification andcontrol,wherethetwotasksofidentificationandcontrolare typicallyconflicting(dualcontrolproblemAström&Wittenmark, 1995).
Hence, inthe realistic caseofplant-model mismatchand/or insufficientexcitation,whethertheschemeconverges,ortowhich pointitconverges,becomesanyone’sguess.Thisisduetothefact thattheobjectiveforparameteradaptationmightbeunrelatedto thecostandconstraintsthatdriveoptimalityintheoptimization problem.Hence,minimizingthemean-squareerroroftheplant outputs,ymodel(t)−yplant(t),maynothelpinourquestfor feasi-bilityandoptimality.
Ontheotherhand,convergenceunderplant-modelmismatch hasbeenaddressedbyBiegler,Grossmann,andWesterberg(1985)
and Forbes, Marlin, and MacGregor (1994). It has been shown that optimaloperationis reached ifmodel adaptation leadsto matchedKKTconditionsforthemodelandtheplant.Hence,the basicidea istoadjust thevalueof in sucha mannerthatthe NCOpredicted by the model match those of the plant, which naturallyleadstothenextsectionconcernedwithmodelingfor optimization.
3.3. Modelingforoptimization
The basicidea isthatthevalidityofa modeldepends onits intendeduse. This concepthasbeen studiedextensively inthe 1990sintheareaofsystemidentificationandcontrolunderthe label“identificationforcontrol”(Aström,1993;Gevers,2004).The proposedsolutionhasbeentousematchingcriteriaforthe identifi-cationandcontroltasks.Thisisobtainedbyfilteringtheprediction error(identification)tomakeitresembletheclosed-loop perfor-mancecriterion(control).
Similarly in optimization, one can consider” modeling for optimization”,whereby thesynergybetweenthemodeling and optimizationstepsisimprovedbyreconcilingtheobjective func-tionsofthetwoproblems.Inconcreteterms,theobjectivefunction of the identification problem can be set up to minimize the errorbetweentheplantand modelNCOs(Srinivasan&Bonvin, 2002).
Theideacanbeformulatedasfollows.LetNbeusedtorepresent thecomponentsoftheNCOin(10).Plantoptimalityunder plant-modelmismatchisgivenby,
0=Nplant
objective = Nmodel
optimization +Nplant−Nmodel identification . (12)
Plant optimality implies zeroing the necessary conditions, Nplant=0. For its part, numerical optimization of the model
enforces Nmodel=0. Hence, if the identification step can
mini-mizeJid=N
plant−Nmodel,theidentifiedmodelwillbesuitedfor
optimization.Suchachoiceofobjectivefunctionisreferredtoas “modelingforoptimization”.
IfthecomponentsoftheNCOcanbemeasured,yNCO,thenthe identificationcriterionbasedontheminimizationoftheoutput erroraddressestheoptimizationobjectivedirectly.However,the evaluationof certaincomponentsof theNCO, suchastheplant gradients,isdifficultandrequiresspecialcarewithrespecttoboth excitationandnoisefiltering.
4. Optimizingcontrolusingasolutionmodel
As shown in Fig. 1, optimization can also be implemented via feedbackcontrol. NCOtracking is organizedaround a solu-tionmodel,thatis,qualitativeknowledgeoftheoptimalsolution. Thissolution model isused toidentifytheNCO and selectthe correspondingmeasurementsyNCO and inputelementsNCO.To illustrate the NCO-based input parameterization, consider the inputu1(t)inagiventimeinterval.CVPwouldparameterizeu1(t)
using a number of constant values, which are then optimized numerically.However,ifweknowthatthepathconstraintS1is
activeduringthatintervalandu1 istheinputthatpushesS1 to
itsbound,analternativeparameterizationwouldbeu1(t)=Gc(S1),
whereGcisanappropriatecontrollerthatkeepsS1active.Hence,
theparameterization looksfor manipulatedvariables (MVs,the inputparametersNCO)thatcanbeusedtotrackcontrolled vari-ables (CVs,theelementsof yNCO)soastosatisfy theNCO. The solutionmodelisnotuniquesincetheNCOdependonthe param-eterizationthatisused.Hence,thediversityinsolutionmodelscan beexploitedtoeaseupimplementation.
Thedevelopmentofasolutionmodelinvolvesthreesteps: (1)Theoptimalsolutionisfirstcharacterizedintermsofthetypes
andsequenceofarcs.Thissteptypicallyusestheavailableplant modelandnumericaloptimizationtocomputetheinput pro-filesusingCVP.
(2)AfinitesetofparametersNCOisselectedtorepresenttheinput profiles (MVs),thecorresponding NCOareformulated from whichtheCVsareobtained,andtheMVsandCVsarepaired toformamultivariablecontrolproblem.
(3)Arobustnessanalysisisperformedtoensurethatthestructure oftheoptimalsolutionisinvariantinthepresenceof uncer-taintyand thenominaloptimalsolutionarestructurallythe same.Ifthisisnotthecase,itisnecessarytomodifythe struc-tureofthesolutionmodelandrepeattheprocedure.
Thesolution modelconsiders thedifferentparts oftheNCO (pathconstraints,pathsensitivities,terminalconstraintsand ter-minalsensitivities)thatneedtobeenforcedforoptimality.The variousNCOelementscanbeimplementedwithvariousdegrees ofeaseordifficulty:apathconstraintisoftenenforcedon-linevia constraintcontrol;apathsensitivityismoredifficulttoimplement asitinvolvestheadjointvariables,whicharenotavailableon-line withouttheuseofaplantmodel;theterminalconstraintsand sen-sitivitiescallforprediction,whichrequiresamodel,orelsethey canbemetiterativelyoverseveralruns.Toeaseimplementation,
itisoftenpossibletoapproximatetheoptimalinputswith sim-plerprofiles.Thisrepresentsthestrengthoftheapproach,asthe approximationsintroducedatthesolutionlevelcanbeassessedin termsofoptimalityloss.
TheMVsofthecontrolproblemarethehandlesavailableto reachoptimality.TheCVsaretheNCOfortheselectedinput param-eterization.Bydefinition,thereareasmanyoptimalityconditions astherearedegreesoffreedom,thusresultinginasquarecontrol system.ThepairingofMVsandCVscanbedoneinacentralized (multivariablecontrol)ordecentralized(multi-loopcontrol) fash-ion.Notethattherearedifferentwaysofimplementingagiven solutionmodel,forexampleusingalternativeMVsviaachangeof variables,usingdifferentpairingsofMVsandCVs,orusingaplant modelforprediction,eachwaydefiningadifferentNCO-tracking option(Srinivasan&Bonvin,2007).
5. ChoiceofaDRTOscheme
ThechoiceofaDRTOschemeisintimatelylinkedtothe mea-surementsandtheinputparameterizationasillustratedinFig.1
anddiscussednext.
5.1. Measurements
Measurementavailabilityiskeyinreal-timeoptimizationand determinesthewaytheuncertainmodelelementscanbeupdated toaccountfortheobserveduncertainty:
(1)Iftheoutputsyplantaremeasured,theuncertaintyisaccounted forbyvaryingtheparametersplantoftheplantmodel.Note, however,thatoptimalitycannotingeneralbeguaranteedin thepresenceofstructuralplant-modelmismatch.
(2)IftheNCOelementsyNCO aremeasured,theuncertaintycan beexpressedasadditivedisturbancesthatrepresentthe devi-ationsoftheNCOfromtheiridealvaluesofzero.Hence,special effortisneededtomeasureorestimatetheNCO,whichrequires excitationandspecificmeasurements.
Whichmeasurementsshouldbeused?Ifbothyplant andyNCO areavailable, itseems easiertoimplement DRTO via modifier-adaptationorNCOtrackingsincethetwo-stepapproachrequires system excitation and numerical optimization to estimate the parameters,anothernumericaloptimizationinthere-optimization stepand,inmanycases,atime-scaleseparationforthetwoiterative steps,namely,identificationandoptimization,toconverge.Yet,the two-stepapproachhasbeenusedextensivelysinceitrepresents theonlyavailableoptionwhenyNCOisnotavailable.Furthermore, measuring,estimatingandapproximatingcertainelementsofthe NCOisnottrivialandrepresentsanopenfieldofresearch.Hence, forthetimebeing,measuringyplantandexpressingtheuncertainty throughparametricvariationsoftheplantmodelremainsthemain option.
5.2. Inputparameterization
Theinputparameterizationisimportantasitaffectsthechoice oftheadaptationstrategy:
(1)Thesimplestandmostgenerallyvalidwayofparameterizing inputprofilesisviaCVP,followingwhichtheoptimalinputs aredeterminedbynumericaloptimization.
(2)ThealternativeistoconsidertheNCO-basedparameterization
NCO,whichlendsitselftothedesignofcontrolloopstoreject theuncertaintyintheNCOseenasadditivedisturbances.
Table1
Modelparametersandoperatingbounds.
m 1300 kg f 0.5 Ns2 m2 umin −8000 N umax 3600 N vmax 40 ms xdes 1000 m
Theparameterizationofchoicedependsontheproblemathand. TheNCOparameterizationisinitiallymoreinvolvedasitrequires numericaloptimizationtocomputethenominaloptimalsolution thatisusedtocharacterizetheNCO.Yet,thisparameterizationmay turnouttobeveryconvenientasoptimalitycanbereachedusing feedbackcontrol,thatis,withouthavingtorepeatoptimization on-line.ThesuccessoftheNCO-basedparameterizationdependsonits validitysinceatailor-madeparameterizationisseldomuniversally valid.
5.3. Choiceofascheme
Thechoiceofaschemedependsonseveralfactors:
(1) AretheNCOknownandcantheybemeasuredorestimated? (2) HavetheNCObeenverifiedtoberobustwithrespectto
uncer-tainty?
(3) Is a multivariable feedback control scheme easily imple-mentable?
Inthecaseofapositiveanswertoallthreequestions,NCOtracking isclearlyanoptionforimplementingDRTO.Modifieradaptationisa validoptionwhenonlyquestion(1)isverified.Otherwise,the two-stepapproachisstillthemethodofchoicebecauseofitsgenerality.
6. Illustrativeexample
Theuseofplantandsolutionmodelsforreal-timeoptimization willbeillustratedonthesimplecarexamplethatispresentednext:
•System:Movementofacarfromonepointtoanother.
•Uncertainty:Slopeoftheroad±5%.
•Objective:Minimizefinaltime.
•Manipulatedinput:Accelerating/brakingforce.
•Pathconstraints:Inputbounds;speedlimit.
•Terminalconstraints:Zerovelocityatfinaltime;coveratleastthe prescribeddistance.
6.1. Formulationoftheoptimizationproblem 6.1.1. Variablesandparameters
x:position,
v
:velocity,u:accelerating/brakingforce,s:slopeof theroad,f:frictioncoefficient,g:gravitationalconstant,and m: massofthecar.Thenumericalvaluesofthemodelparametersand operatingboundsaregiveninTable1.6.1.2. Modelequations
˙
x=
v
x(0)=0, (13)˙
v
=u−mfv
2 −s(x)g,v(0)
=0. (14)Thenominalmodelassumeszeroslope,thatiss(x)=0,whilein realitytheunknownelevationprofile,whichistheintegralofthe slopeprofile,isasshowninFig.2.
Fig.2.Elevationprofile.
6.1.3. Optimizationproblem
Theoptimizationproblemcanbeformulatedmathematicallyas follows:
min
u(t),tf
J=tf
s.t. dynamic system (13)and (14)
umin≤u(t)≤umax
v(
t)≤v
maxv(
tf)=0x(tf)≥xdes.
(15)
6.2. Characterizationoftheoptimalsolution
Fig.3showsthattheoptimalsolutionconsistsofthreearcs,with thesuccessiveinputsumax,upathandumin:
•Thefirstarcumaxcorrespondstomaximumaccelerationinorder toreach
v
maxasquicklyaspossible.Thedurationofthisarc,t1,depends ontheslope,which isuncertain.However,t1 canbe
determinedimplicitlyuponreaching
v
max,thatisv(
t1)=v
max.Fig.3.Nominaloptimalsolution(s=0):inputu/100[N],velocityv[m/s]andposition
x/20[m]profiles.
Table2
PairingofMVsandCVs.
Pathobjectives Terminalobjectives Constraints t1: v(t1)=vmax t2→x(tf)=xdes
upath(t): v(t)=vmax tf: v(tf)=0
Sensitivities – –
•Thesecond arckeepsthevelocity at
v
max,for whichthecor-respondinginput valueupath can bedeterminedfrom (14)as
upath=fv2max+s(x)mg.Thevalueupath isalsoafunctionofthe uncertainslope.
•The third arccorresponds to fullbraking in order toachieve
v(
tf)=0.Theswitchingtime t2 betweenthesecondandthirdarcs is chosen so that x(tf)=xdes, that is, the desired dis-tancewillbeexactly coveredwhen thevelocitygoestozero. The final time is determined upon reaching zero velocity,
v(
tf)=0.6.2.1. Remarks
(1)Thiscarexampledoesnotinvolvesensitivities,thatis,the opti-malsolutionisentirelydeterminedbyactiveconstraints.The reader isreferred toSrinivasanand Bonvin(2007)for cases wheresensitivitiesareinvolved.
(2)Thetypesandsequenceofarcs(umaxfollowedbyupathandthen
umin)holdforanycarregardlessof itsweightand accelera-tion/brakingpower.Theyevenholdgenericallyforabicycle,for whichthesecondarcvanishes(t1doesnotexist).Thisgeneric
aspectoftheoptimalsolutionprovidesmuchrobustnesstothe solution-modelapproach.
6.3. NCOtracking
Inputparameterizationisstraightforwardinthisproblem,with theinputparameters=[t1upatht2tf]T.ThepairingofMVs(t1,upath,
t2andtf)andCVs(v(t1)=
v
max,v(
t)=v
max,x(tf)=xdes,andv(
tf)=0)followsdirectlyfromthecharacterizationoftheoptimalsolution andisgiveninTable2.
Sincethereisapredictioninvolvedinthepairingt2→x(tf)=xdes, meetingthisconstraintwilleitherrequireapredictivemodelor beimplementedoverseveralruns.Next,wepresenttwocontrol strategiesthatcorrespondtodifferentwaysofadjustingt2tomeet
theterminalconstraintx(tf)=xdes.
6.3.1. Run-to-runadaptationoft2
Intheabsenceofamodeltopredictx(tf)duringtherun,NCO trackingwillencompasson-linecontroltoenforce
v(
t)=v
maxinthesecond arcand run-to-run controltoadapt t2 soasto
sat-isfy x(tf)=xdes over severalruns.The timeinstantst1 and tf are determinedbythevelocityreaching
v
maxand0,respectively.Itisassumedthattheplant(thecarwithvaryingunknownslope)will havethesametypesandsequenceofarcs,butdifferentvaluesof
t1,upath,t2andtf.1
6.3.2. On-lineadaptationoft2
Predictionofthefinal positionx(tf)toinitiatebreakingatt2
canbedoneduringtherunusingthenominalplantmodelthat assumess(x)=0.Sincet1,upathandtfcanbedeterminedfromtheir
1Thiscanbeverifiednumericallyoff-linebyperturbingthenominalmodeland computingthecorrespondingoptimalinputs.
Table3
Constraintandcostvaluesforvariousoptimizationscenarios:Iv+=
t2t1
v+(t)dt,wherev+(t)=v(t)−vmaxifv(t)>vmaxand0otherwise;vm:maximalvelocity;xf:final
position;tf:finaltime(cost);tfaug:costpenalizedfordeviationfromconstraints,eachdeviationbeingweighted5timesthecorrespondingLagrangemultiplier.
Optimizationscenario Iv+[m] vm[m/s] xf[m] tf[s] tfaug[s]
Idealsolution 0 40 1000 35.31 35.31
Open-loopuseofnominaloptimalinput 34.57 43.87 1045.3 35.71 43.70
Re-optimization–noadaptation 1.85 40.87 1003.8 36.00 36.56
Re-optimization–adaptation 0.05 40.08 1004.4 35.44 35.90
NCOtracking–t2notadapted 0.003 40.001 1012.2 35.64 36.86
NCOtracking–run-to-runt2adaptation 0.002 40.001 1000 35.31 35.31
NCOtracking– on-linet2adaptation 0.002 40.001 996.5 35.22 35.57
correspondingNCOduringsimulation(integration)ofthedynamic model,theoptimizationproblem(15)canberewrittenas:
min
t2
J=tf
s.t.dynamic system(13)and (14)
u(t)=
⎧
⎪
⎨
⎪
⎩
umax for 0≤t<t1 fv2max for t1≤t<t2 umin for t2≤t<tf t1:v(
t1)=v
max tf :v(
tf)=0. (16)Problem (16) is simpler to solve than theoriginal problem
(15) for at least two reasons: (i) the number of degrees of freedom has been reduced from ∞ to 1 and (ii) the discon-tinuitiesat the switching instants can be handledmuch more easily and without oscillations (Schlegel & Marquardt, 2006a). For implementation, the current state information is used as initial conditions for re-optimization at each sampling time. Note that the slope is not updated. The optimal value of t2
is computed at each re-optimization instant, and breaking is implementedwhentherunningtimeequalsthevalueoft2
com-putedlast.Aswithrun-to-runadaptationoft2,thetimeinstants
t1 and tf are determined by the velocity reaching
v
max and 0,respectively.
6.4. Optimizationresults
Theperformance ofvariousDRTOschemesissummarizedin
Table3anddiscussednext.Thecaseofnomeasurementnoiseis consideredheretobeabletofocusonthedistinguishingfeatures ofthevariousapproaches.
Thereferencescenarioistheidealsolution,whichiscomputed withknowledge ofthevaryingslopeand isshownin Fig.4.As expected,thisscenariomeetsexactlyallthepathandterminal con-straints.Incomparison,theopen-loopuseofthenominaloptimal inputleadstosignificantviolationofthespeedconstraintasthereis nopossibilitytocompensateforthefactthattheroadgoesdownhill initially.
ThefivesDRTOschemesanalyzedbelowcorrespondtodifferent re-optimizationandNCO-trackingchoices:
•Re-optimization – no adaptation: Uncertaintyis consideredas additivestatedisturbances,andCVPisusedfornumerical opti-mization. Re-optimization every two seconds without slope adaptationgivestheprofileshowninFig.5(top-left).Thereis considerablechatteringcausedbytheneedforadditional bra-kingintheinitialdownhillpartfollowedbyadditionalpowerin theuphillpart.Thepathconstraintisnotmetaccurately,asseen bytheIv+ valuesinTable3.Notethatthisschemecorresponds toeconomicnonlinearMPC(Rawlings&Amrit,2009)andshows
thenegativeeffectofnotbeingabletoadapt forplant-model mismatch.
•Re-optimization–adaptation:Uncertaintyisconsideredasboth parametricvariationsandadditivestatedisturbances,andCVP isusedfornumericaloptimization.Withadaptationoftheslope parameter,chatteringandthedeviationfrom
v
maxinthesecondarcarereduced(comparethecorrespondingIv+valuesinTable3). Treatingtheuncertaintyasparametricvariationshelpstrackthe pathconstraints,butthereisstillsomeresidualerror.Notethat itisverydifficulttocontroltheterminalpositioninasinglerun becauseofmodelingerrors.Acomparisonofthetwoinput pro-filesforre-optimizationshowsthatparameteradaptationhelps approximatetheidealinput(compareFigs.4and5(toprow)).
•NCOtracking–t2notadapted:UncertaintyisconsideredasNCO
deviations,andNCOtrackingisimplemented.Withoutt2
adapta-tion,thepathconstraint
v(
t)=v
maxandthefinalvelocityv(
tf)=0aremet,butnotx(tf)=xdes.
•NCOtracking–t2adaptedoverseveralruns:Similartotheprevious
case,butt2isnowadaptedonarun-to-runbasis.After5runs,
alltheconstraintsaremetandoptimalityisreached,whichin thisproblemisguaranteedbysatisfactionoftheconstraintson maximumvelocityandfinalposition.
•NCOtracking–on-lineadaptationoft2:Evenwhent2isadapted,
theterminalpositionconstraintx(tf)=xdesisnotmetexactlysince itisadaptedonthebasisofaninaccuratemodel.Suchterminal objectivescanonlybemetoverseveralruns.
Fig.4.Idealsolutionforknownvaryingslope:inputu/100[N],velocityv[m/s]and positionx/20[m]profiles.
0 10 20 30 40 −10000
−5000 0 5000
Reoptimization − no parameter adaptation
0 10 20 30 40
−10000 −5000 0 5000
Reoptimization − parameter adaptation
0 10 20 30 40
−10000 −5000 0 5000
NCO tracking − no update of t
20 10 20 30 40
−10000 −5000 0 5000
NCO tracking − on-line control of t
2Fig.5. OptimalinputobtainedwithfourDRTOschemes.ThecaseofNCOtrackingwitht2adaptedover5runsisnotshownhereastheconvergedsolutioncorrespondsto theidealsolutionshowninFig.4.
7. Conclusions
Thispaperhasaddressedthequalityofmodelsusedfor real-timeoptimization.Accordingtothequote“Allmodelsarewrong butsomeareuseful”(Box,1979),themodelisnotviewedasthe “truth”,butratherasatoolthatmustbetailoredtotheoptimization scheme.Modelingisreallyaboutmakingeducatedapproximations toarriveatamodelofacceptablecomplexitythatisadequatefor optimizationinthepresenceofuncertainty.Whendealingwitha realplant,itisimportanttofindagoodwayofintroducing approx-imations.Isitattheplant-modellevel,beforegoingthroughthe optimizationmachinery?Orisitattheimplementationlevel,when theusercanseetheimplicationsofselectedapproximations?Ithas beenarguedthattheparametersoftheplantmodeladjustedusing outputmeasurementsmightnotbethebesthandlestoadjustin realtime,sincetheymightonlybelooselyconnectedto optimal-ity.Bycontrast,iftheNCOelementsaremeasuredorestimated,the optimizationobjectivecanbeincorporatedintheparameter iden-tificationstep,therebyaccommodatingtheobjectiveof“modeling foroptimization”.
Thepaperhasalsodiscussedthevariouselementsofasolution model.Itsprimitiveversionistousepiecewise-constantprofiles. However,one coulddeviseamore appropriatelyparameterized solutionstructurebydissectingthenominaloptimalinputprofiles andrelatingtheirelementstodifferentpartsoftheNCO.Sincethe complexityofsolutionmodelsdependsonthenumberofinputs, andnotonthenumberofstatesorthenonlinearityoftheplant,the solutionmodeliseasiertoobtainforproblemswithonlyafewarcs (andthusalsoonlyafewinputelementsNCO),andthisregardless oftheorderofthesystem.Suchatailor-madeparameterizationhas beenshowntobemoreefficientthanCVP.
One strength of NCO tracking is the possibility of combin-ingoff-linetasks(numericaloptimizationbasedonthenominal plantmodeltodeterminethesetofactiveconstraints) and on-lineactivities(optimizingcontrolthatadjuststheinputs onthe basisofmeasurements).Anothernicefeatureisthepossibility,if necessary,ofintroducingapproximationsinthevariousprofilesto easeimplementation.Thisisparticularlyeffectiveindealingwith sensitivity-seekingarcs,whichareoftendifficulttocomputebut, atthesametime,contributeonlynegligiblytothecost.Instead ofbuildingamodelthatwillpredicttheplantperformancefrom scratch,NCOtrackingstartswitharobustparameterizedmodelof thesolutionandadjuststhefewinputparametersthatare inti-matelylinkedtoplantoptimality.Thesynergybetweenoff-line andon-linecomputationsforreal-timeoptimizationneedstobe studiedinmoredetails.Multi-parametricprogrammingandNCO trackingrepresenttwosuchinitialattempts.Abigpushcouldcome fromresearchersinthefieldofoptimizationoncetheyrealizethat theavailablemodelsarenotsufficientlyaccuratetodriveplantsto optimality.
Acknowledgments
Theauthorswouldliketoacknowledgeinsightfuldiscussions withBenoîtChachuatandGrégoryFranc¸ois.
References
Aström,K.J.(1993).Matchingcriteriaforcontrolandidentification.InEuropean controlconference(pp.248–251).Netherlands:Groningen.
Aström,K.J.,&Wittenmark,B.(1995).Adaptivecontrol(2nded.).Reading,MA: Addison-Wesley.
Bemporad,A.,Morari,M.,Dua,V.,&Pistikopoulos,E.N.(2002).Theexplicitlinear quadraticregulatorforconstrainedsystems.Automatica,38,3–20.
Biegler,L.T.(2009).Technologyadvancesfordynamicreal-timeoptimization. Com-puterAidedChemicalEngineering,27,1–6.
Biegler,L.T.,Grossmann,I.E.,&Westerberg,A.W.(1985).Anoteonapproximation techniquesusedforprocessoptimization.ComputersandChemicalEngineering,
9,201–206.
Box,G.E.P.(1979).Robustnessinthestrategyofscientificmodelbuilding.InR.L. Launer,&G.N.Wilkinson(Eds.),Workshoponrobustnessinstatistics. Bryson,A.E.,&Ho,Y.-C.(1975).Appliedoptimalcontrol.WashingtonDC:Hemisphere
PublishingCorporation.
Chachuat,B.,Srinivasan,B.,&Bonvin,D.(2009).Adaptationstrategiesforreal-time optimization.ComputersandChemicalEngineering,33(10),1557–1567. Chen,C.Y.,&Joseph,B.(1987).On-lineoptimizationusingatwo-phaseapproach:An
applicationstudy.IndustrialandEngineeringChemistryResearch,26,1924–1930. D’Amato,F.,Kumar,A.,Lopez-Negrete,R.,&Biegler,L.T.(2012).Fastnonlinearmodel predictivecontrol:Optimizationstrategyandindustrialprocessapplications. InProc.ofthechemicalprocesscontrolconferenceVIIIconference.GA:Savannah Harbor.
Diehl,M.,Bock,H.G.,&Schlöder,J.P.(2005).Areal-timeiterationschemefor non-linearoptimizationinoptimalfeedbackcontrol.SIAMJournalonControland Optimization,43(5),1714–1736.
Diehl,M.,Bock,H.G.,Schlöder,J.P.,Findeisen,R.,Nagy,Z.,&Allgöwer,F.(2002). Real-timeoptimizationandnonlinearmodelpredictivecontrolofprocessesgoverned bydifferential-algebraicequations.JournalofProcessControl,12(4),577–585. Diehl,M.,Ferreau,H.J.,&Haverbeke,N.(2009).Efficientnumericalmethodsfor
nonlinearMPCandmovinghorizonestimation.InL.Magni,D.M.Raimondo,& F.Allgöwer(Eds.),Nonlinearmodelpredictivecontrol(pp.391–417).
Eaton,J.W.,&Rawlings,J.B.(1990).Feedbackcontrolofnonlinearprocesses usingon-lineoptimizationtechniques.ComputersandChemicalEngineering,14, 469–479.
Forbes,J.F.,&Marlin,T.E.(1996).Designcost:Asystematicapproachto technol-ogyselectionformodel-basedreal-timeoptimizationsystems.Computersand ChemicalEngineering,20,717–734.
Forbes,J.F.,Marlin,T.E.,&MacGregor,J.F.(1994).Modeladequacyrequirements foroptimizingplantoperations.ComputersandChemicalEngineering,18(6), 497–510.
Gevers,M.(2004).Identificationforcontrol:Achievementsandopenproblems.In
IFACDYCOPS-7(pp.401–412).MA:Boston.
Heidarinejad,M.,Liu,J.,&Christofides,P.D.(2012).Economicmodelpredictive controlofnonlinearprocesssystemsusingLyapunovtechniques.AIChEJournal,
58,855–870.
Kirk,D.E.(1970).Optimalcontroltheory:Anintroduction.London:Prentice-Hall. Ljung,L.(1999).Systemidentification:Theoryfortheuser(2nded.).UpperSaddle
River,NJ:PTRPrenticeHall.
Marchetti,A.,Chachuat,B.,&Bonvin,D.(2007).Batchprocessoptimizationvia run-to-runconstraintsadaptation.InEuropeancontrolconference.Greece:Kos.
Marlin,T.E.,&Hrymak,A.N.(1997).Real-timeoperationsoptimizationof continu-ousprocesses.InAIChEsymposiumseries—ChemicalprocesscontrolconferenceV, Vol.93(pp.156–164).
Montgomery,D.C.(2005).Designandanalysisofexperiments(6thed.).NewYork: JohnWiley&Sons.
Pistikopoulos,E.N.,Georgiadis,M.C.,&Dua,V.(2007).Multi-parametricmodel-based control:Theoryandapplications.Wiley-VCH.
Rawlings,J.B.,&Amrit,R.(2009).Optimizingprocesseconomicperformanceusing modelpredictivecontrol.InL.Magni,D.M.Raimondo,&F.Allgöwer(Eds.),
Nonlinearmodelpredictivecontrol(pp.119–138).
Rawlings,J.B.,&Mayne,D.Q.(2009).Modelpredictivecontrol:Theoryanddesign. NobHill.
Richter,S.,Morari,M.,&Jones,C.N.(2011).Towardscomputationalcomplexity cer-tificationforconstrainedMPCbasedonLagrangerelaxationandthefastgradient method.InIEEEconferenceondecision&controlOrlando,FL.
Schlegel,M.,&Marquardt,W.(2006a).Detectionandexploitationofthecontrol switchingstructureinthesolutionofdynamicoptimizationproblems.Journal ofProcessControl,16,275–290.
Schlegel,M.,&Marquardt,W.(2006b).Adaptiveswitchingstructuredetectionfor thesolutionofdynamicoptimizationproblems.IndustrialandEngineering Chem-istryResearch,45,8083–8094.
Srinivasan,B.,&Bonvin,D.(2002).Interplaybetweenidentificationandoptimization inrun-to-runoptimizationschemes.InAmericancontrolconferenceAnchorage, AK,(pp.2174–2179).
Srinivasan,B.,&Bonvin,D.(2007).Real-timeoptimizationofbatchprocessesvia trackingthenecessaryconditionsofoptimality.IndustrialandEngineering Chem-istryResearch,46(2),492–504.
Srinivasan,B.,Bonvin,D.,Visser,E.,&Palanki,S.(2003).Dynamicoptimizationof batchprocesses:II.Roleofmeasurementsinhandlinguncertainty.Computers andChemicalEngineering,27,27–44.
Srinivasan,B.,Palanki,S.,&Bonvin,D.(2003).Dynamicoptimizationofbatch pro-cesses:I.Characterizationofthenominalsolution.ComputersandChemical Engineering,27,1–26.
Terwiesch, P., Agarwal, M., & Rippin, D. W. T. (1994). Batchunit optimiza-tion with imperfect modeling—A survey. Journal of Process Control, 4, 238–258.
Walter,E.,&Pronzato,L.(1997).Identificationofparametricmodelsfromexperimental data.Berlin:Springer-Verlag.
Wang, Y., & Boyd, S. (2010). Fast model predictive control using online optimization. IEEE Transactions on Control Systems Technology, 18(2), 267–278.
Zavala,V.M.,&Biegler,L.T.(2009).TheadvancedstepNMPCcontroller:Optimality, stabilityandrobustness.Automatica,45,86–93.
Zeilinger,M.N.,Jones,C.N.,&Morari,M.(2011).Real-timesuboptimalmodel pre-dictivecontrolusingacombinationofexplicitMPCandonlineoptimization.
![Fig. 3. Nominal optimal solution (s = 0): input u/100 [N], velocity v [m/s] and position x/20 [m] profiles.](https://thumb-us.123doks.com/thumbv2/123dok_us/9718907.2853502/7.892.67.435.819.1115/fig-nominal-optimal-solution-input-velocity-position-profiles.webp)
![Fig. 4. Ideal solution for known varying slope: input u/100 [N], velocity v [m/s] and position x/20 [m] profiles.](https://thumb-us.123doks.com/thumbv2/123dok_us/9718907.2853502/8.892.59.272.375.531/ideal-solution-known-varying-slope-velocity-position-profiles.webp)
