On Pointwise Feedback Invariants of Linear
Parameter-varying Systems
R. Marta Garc´ıa Fern´andez
∗,
Miguel V. Carriegos
Departamento de Matemáticas, Universidad de León, 24071 León, Spain
Copyright c2017 by authors, all rights reserved. Authors agree that this article remains permanently open access under the terms of the Creative Commons Attribution License 4.0 International License
Abstract
Linear systems with constant real coefficients are completely described in terms of feedback actions. In this paper the problem is studied in the framework of linear systems where coefficients depending continuously on a set of parameters. Some invariants are given as well as criteria to find a complete classification in low dimension.Keywords
Feedback Classification, Systems over Commutative Rings, Controllability1
Introduction
Let’s consider the family of linear control systems
Σ(λ) =
˙
x=A(λ)x(t) +B(λ)u(t)
y(t) =C(λ)x(t) (1)
wherex(t) is the n-dimensional vector of states, u(t)is them-dimenional vector of external inputs andy(t)is the
p-dimensional vector of outputs. MatricesA(λ),B(λ)and
C(λ)depend continuously on some parametersλliving in a compact topological spaceΛ. We’ll denote byC(Λ,R)the ring of continuous real functions defined onΛwith point-wise sum and product. This is a commutative ring where
1C(Λ,R)and0C(Λ,R)are respectively the constant functions
λ7→1andλ7→0.
It is well known that if the matrices have constant coeffi-cients then there is a canonical form forΣ, the Brunovsky’s Canonical Form [5].
Our main goal in this paper is to stablish the so-called pointwise feedback equivalence, see [8], for systems over
C(Λ,R). This equivalence is just given by all evaluations of parameters of the given linear systems. Therefore point-wise feedback equivalence is studied at every point just like classical feedback equivalence for linear systems with con-stant coefficients.
We also are interested in stablish global invariants of linear systems for such pointwise feedback equivalence.
Here some sets of zeroes of functions will arise. A com-plete set of invariants will be given. Despite this classifica-tion result, we are not given canonical forms for pointwise feedback action. This is left as a future work.
The paper is organized as follows. Section 2 reviews main results involving feedback equivalence of linear sy-stems which are traslated to the study of pointwise feed-back equivalence. Section 3 reviews determinantal ranks of matrices in order to get main pointwise feedback inva-riants which are introduced in section 4. This section 4 is also devoted to prove that the set of zeroes of determinantal ideals of reachability maps are invariant for the pointwise feedback equivalence. Low dimensional casesn ≤ 5 are completely described and characterized in section 5. Fi-nally, we list our conclusions.
2
Feedback actions and feedback
classification
LetR be a commutative ring with unit1 6= 0. A m -input,n-dimensional linear system overRis just a pair of matricesΣ = (A, B) ∈ Rn×n ×Rn×mrepresenting the
right-hand-side (dynamic) equation
x+(t) =Ax(t) +Bu(t),
wherex+(t)represents time-derivative in continuous time framework or time-shift for discrete systems.
Linear systems Σ0 = (A0, B0) and Σ are equivalent (feedback) whenΣcan be transformed to Σ0 by one ele-ment of the feedback groupFnm(R)and we will note this
byΣ ∼Σ.We recall that feedback groupFnm(R)is the
generated group by the following three types of transfor-mations:
(1) A −→ A0 = P AP−1,B −→ B0 = P Bfor some invertible matrix P. The transformation is a conse-quence of a change of base inRn,the state module. (2) A−→A,B −→B0 =BQfor some invertible
(3) A −→ A0 =A+BK ,B −→ B for somem×n
matrixKwhich is called a feedback matrix.
Note 2.1. The feedback classification problem is wild in the sense of Representation Theory (see [4]). Hence it is an open problem in the general case and it is unlikely to be solvable. However in some cases it is possible to find solutions: WhenR = Kis a field the problem is known as classical case and a classical result of Brunovsky [5, 13, 19] characterizes the class of equivalence ofΣby the action of the feedback group, see below.
Throughout this paper we focus on commutative ring
R = C(Λ,R)of real valued continuous functions defi-ned on compact topological spaceΛ. Note that sinceΛis compact then maximal idealsmofRare in one to one cor-respondence with points inΛ, that is, given a maximalmof
Rthere is a unique pointλm ∈Λsuch thatf(λm) = 0for
everyf ∈m, and conversely, given a pointλ∈Λ, the set
mλ ={f : f(λ) = 0}is a maximal ofR(the reader can
see [1] for details).
Let be Σ = (A, B) a linear dynamical system over
R=C(Λ,R).Then linear system overR∼=R/mλ0
obtai-ned by extension of scalarsC(Λ,R) −→ C(Λ,R)/mλ0
sendingf 7→f(λ0)is just obtained by the evaluation at the pointλ0∈Λ; that is,Σ(λ0) = (A(λ0), B(λ0)).
Now we recall the definition of pointwise feedback equi-valence of linear systems as introduced in [8].
Definition 2.2. Linear systems Σ and Σ0 are pointwise feedback equivalent if systemsΣ(λ) = (A(λ), B(λ))and
Σ0(λ) = (A0(λ), B0(λ))over Rare feedback equivalent
for allλ∈Λ.
Pointwise feedback equivalence is weaker than feedback equivalence. That is to say,
Theorem 2.3. If systems Σ = (A, B) and Σ0 = (A0, B0)are feedback equivalent via the action of element
(P, Q, K) ∈ Fnm(C(Λ,R)) then Σ(λ) and Σ0(λ) are
feedback equivalent via(P(λ), Q(λ), K(λ))∈Fnm(R)
Proof. Suppose that (A, B) is feedback equivalent to
(A0, B0)via(P, Q, K); that is to say
A0P =P(A+BK), andB0=P BQ
it follows that above equalities hold on every evaluation; that is
A0(λ)P(λ) =P(λ)(A(λ) +B(λ)K(λ)), B0(λ) =P(λ)B(λ)Q(λ) (2)
Now the proof is complete once it is assured that P(λ)
and Q(λ) are invertible. But this is trivial because, for instance, det(P) anddet(Q) are units inC(Λ,R)and a fortioridet(P(λ))6= 0anddet(Q(λ))6= 0.
We are interested in give a complete (and minimal if pos-sible) set of invariants for pointwise feedback relation. First we recall classical invariants and canonical form for con-stant linear systems over a field.
Definition 2.4. Let beΣ = (A, B)a linear dynamical sy-stem of size(m, n)over commutative ringR. Consider the
R-module NΣ
i generated by columns of the n×im
ma-trixBΣ
i = (B|AB|. . .|Ai−1B). We’ll denote byMiΣthe
quotient moduleMΣ
i =Rn/NiΣ.
Above modules are feedback invariant associated to a gi-ven linear (over any commutative ring), and they form a minimal complete set in the case of controllable systems over fields. In fact, the following results are well known. First, modules are shown to be feedback invariants: Theorem 2.5. (cf. [10]) Let beΣ = (A, B)a linear dyna-mical system of size(m, n)over a ringR.Then
(i) (0)⊆NΣ
0 ⊆N1Σ⊆. . .⊆NnΣ.
(ii) The canonical homomorphism
ϕi:NiΣ/N
Σ
i−1→N Σ
i+1/N Σ
i
x+NiΣ−1→Ax+NiΣ
is surjective for1≤i≤n−1.
(iii) IfΣis feedback equivalent toΣ0thenNiΣandMiΣare isomorphic toNΣ0
i andMΣ 0
i respectly, for1≤i≤n.
(iv) If Σ is a reachable system of simple input n -dimensional then the modules NΣ
i 1≤i≤n and
MΣ
i 1≤i≤nare free.
(v) If Σ is a Brunovsky system then the modules
NΣ
i 1≤i≤nand
MΣ
i 1≤i≤nare free.
Now we deal with the case of fieldsK: We prove that above invariantK-vector spacesNiΣform a complete and
minimal set of feedback invariants.
Theorem 2.6. (cf. [5]) Let beΣ = (A, B)a reachable linear dynamical system of size(m, n)over a fieldK. Then
there exist positive integersκ1 ≥κ2 ≥ · · · ≥κsuniquely
determined byΣwithn=κ1+κ2+· · ·+κs, such thatΣ
is feedback equivalent to the systemΣκ= (Aκ, Bκ)where
Aκis the block matrix
Aκ=
Aκ1 0 · · · 0 0 Aκ2 · · · 0
..
. ... . .. ...
0 0 · · · Aκs
,
and blockAκiis theκi×κimatrix
Aκi=
0 1 0 0 · · · 0 0 0 1 0 · · · 0 0 0 0 1 · · · 0
..
. ... ... ... . .. ...
0 0 0 0 · · · 1
0 0 0 0 0 0
and
Bκ=
s
z }| {
m−s
z }| {
0 0 · · · 0
..
.
0
· · ·0
1 0 · · · 0
0 0 · · · 0
0
... · · ·0
1 0 · · · 0
..
. ... . .. ... ...
0 0 · · · 0
0 0
· · · ...1 0 · · · 0
κ1
κ2
κs
The integersκ = {κ1, κ2, . . . , κs} are called the
Kro-necker indices ofΣ.They are a complete set of invariants forΣby the action of the feedback group.
Proof. See [5] or [10].
Above linear systemΣκ = (Aκ, Bκ)is called
Bruno-vsky’s Canonical Form associated to indicesκ.
Note that ifm= 1and system is controllable it is easy to see that there is just one nonzero index andκ1 =nhence
s= 1in above matrices and consequently Brunovsky’s Ca-nonical Form in this case is just the CaCa-nonical Controller Form
Brunovsky’s Canonical form gives rise a complete and minimal set of feedback invariants for controllable linear systems over a field. This is the case ofR = R, which is the base for our study. To be precise, the following result summarizes the list of invariants.
Theorem 2.7. (cf.[10]) Let beΣ = (A, B)a reachable linear dynamical system of size(m, n) overR. Then the
feedback equivalence class ofΣis characterized for each one of the following sets:
(i) The Kronecker’s indices{κi}1≤i≤s
(ii) dim(NiΣ) 1≤i≤n
(iii) dim NiΣ/NiΣ−1 1≤i≤n
Proof. See [10].
According the above resultrankRMiΣ 1≤i≤nis a
com-plete set of invariants for the class of feedback of a Bruno-vsky form. If K is a field and Σ = (A, B)a reachable dynamical systemrank MΣ
i
= n−rankB˜Σ
i
and in consequencenrankB˜Σi o
1≤i≤n is the list of invariants
we need:
Theorem 2.8. A complete set of pointwise feedback invari-ants for the reachable linear systemΣ(λ) = (A(λ), B(λ))
is given by the one (and hence all) follo–wing data:
(i) dimR(NiΣ(λ)),1≤i≤n,λ∈Λ
(ii) ndimNiΣ(λ)/NiΣ(−1λ)o,1≤i≤n,λ∈Λ
(iii) nrankRB˜iΣ(λ)o,1≤i≤n,λ∈Λ
Proof. Two reachable linear systems Σ and Σ0 over
C(Λ,R)are pointwise feedback equivalence if and only if (by definition) linear systemsΣ(λ)andΣ0(λ)are feedback equivalent overR. By Brunovsky’s Theorem this is equiva-lent todimR(NiΣ(λ)) = dimR(NiΣ0(λ)), for all1≤i≤n,
λ∈Λ. Hence data(i)is a complete set of pointwise feed-back equivalence. Statements(ii)and(iii)are proved in the same way.
3
Determinantal ranks
Note that pointwise feedback invariants found in above section involves a potentially infinite data (for instance, when compact topological space Λ is infinite). Thus we need to refine the result in order to find a minimal complete set of pointwise feedback invariants. This section is devo-ted to briefly review determinantal rank of a matrix and to compute the determinantal ranks of Brunovsky’s canonical forms in order to find our invariants in terms of determinan-tal ranks in the sequel.
Let beM = (aij)ann×mmatrix with entries inRand
let beia nonnegative integer. Thei−th determinantal ideal ofM,denoted byUi(M),is the ideal ofRgenerated by
all thei×iminors ofM.By construction we have
R=U0(M)⊇ U1(M)⊇. . .⊇ Ui(M)⊇. . .
andUi(M) = 0fori >min{m, n}.The rank ofM,
de-noted byrankR(M), is the largestisuch thatUi(M)6= 0.
ThenΣis reachable if and only ifUn BnΣ
=R.
Now we give a technical result of characterization of Brunovsky’s canonical formsΣκ = (Aκ, Bκ) depending
on the sequence of determinantal ideals. Fist, we give with some definitions and notations.
Definition 3.1. Let ben ∈ Nandκ = {κ1, κ2, . . . , κs}
withκ1 ≥κ2 ≥ · · · ≥ κsa partition ofn. We call dual
partition ofκto the partitionη = {n1, n2, . . . , np} with
n1 ≥ n2 ≥ · · · ≥ npofnwhereni,is the number ofκj
which are more or equal thani.
Note 3.2. The applicationκ→ηis biyective on the set of partitions ofn. See [2].
Note 3.3. Note thatn1=s.
Theorem 3.4. Let beκ={κ1, κ2, . . . , κs}a partition ofn
andη ={n1, n2, . . . , np}be its associated dual partition.
The following conditions are equivalent.
(i) κare the Kronecker indices of systemΣ = (A, B)
(ii) For1≤i≤p−1we have
Un1+n2+...+ni
˜
BΣκ i
= K
Un1+n2+...+ni+1
˜
BΣκ i
= (0)
and fori=p
Un1+n2+...+np
˜
BΣκ p
Proof. By Brunovsky Theorem, 2.6,
A=
E1
E2 . ..
Es
,
where the matrix
Ei =
0 1 0 · · · 0
0 0 1 . .. 0
..
. ... ... . .. 0 0 0 0 · · · 1 0 0 0 . . . 0
,
is of dimensionκi×κiand
B=
e1 0 · · · 0 0 · · · 0
0 e2 · · · 0 0 · · · 0 ..
. ... . .. ... ... . .. ...
0 0 0 es 0 · · · 0
,
whereei = (0, . . . ,0,1)tis of dimensionκi×1. Then the
following properties can be easily verified. i)
AhB=
E1he1 0 · · · 0 0 · · · 0
0 E2he2 · · · 0 0 · · · 0 ..
. ... . .. ... ... ...
0 0 · · · Eshes 0 · · · 0
ii) Ifh > κiisEihei= 0
iii) Im(AhB)∩Im(Ah0B) ={0}ifh6=h0
Let ben1the number ofκjgreater than or equal to1, then
the definitionni and by the properties i) and ii) it is
follo-wed
rank(B) =s=n1,
rank(AB) =n2,
rank(A2B) =n 3,
rank(A3B) =n 4, ..
.
rank(Anp−1B) =n p,
and by property iii)
rankB˜Σκ i
=n1+n2+. . .+ni
for1≤i≤p, or equivalently
Un1+n2+...+ni
˜
BΣκ i
=K
Un1+n2+...+ni+1
˜
BΣκ i
= (0)
for1≤i≤p.
Conversely, by the equalities
rankB˜Σκ i
=n1+n2+. . .+ni rankB˜Σκ
i−1
=n1+n2+. . .+ni−1
and the property iii) before it is followed
rank(Ai−1B) =ni
In consequence,
rank(B) =n1=s,
rank(AB) =n2,
rank(A2B) =n 3, ..
.
rank(Ap−1B) =np,
with
n1≥n2≥ · · · ≥np
By the definition ofni(that is
n1is equal to the number ofκjgreater than or equal to 1,
n2is equal to the number ofκjgreater than or equal to 2, ..
.
npis equal to the number ofκjgreater than or equal to p)
it is obtained κi and so the complete set of invariants
for the Brunovsky formΣκ, (for which the partition η =
{n1,n2,. . . , np}is its dual associated partition).
The following properties of Brunovsky canonical forms over any fieldKare easily derived:
Corollary 3.5. A Brunovsky canonical form Σκ = (Aκ, Bκ)over the fieldKverifies
Ui
˜
BΣκ i
=K 1≤i≤n.
Corollary 3.6. A Brunovsky canonical form Σκ = (Aκ, Bκ)over the fieldKverifies
rankB˜Σκ i
=n1+n2+. . .+ni ≥i for1≤ i≤p
whereη ={n1, . . . , np}is the dual partition ofκ. In
par-ticular
rankB˜Σκ p
.=n1+n2+. . .+np =n.
Corollary 3.7. The following conditions hold forK-vector spacesNΣκ
i generated by columns of then×immatrix. ˜
BΣκ
i = (Bκ|AκBκ|. . .|Aiκ−1Bκ)
associated to Brunovsky canonical formΣκ
(i) dimNΣκ i
≤dimNΣκ i+1
for alli= 1,2, . . .
(ii) IfdimNΣκ t
= dimNΣκ t+1
then
dimNΣκ t
=· · ·= dim NΣκ n
Now, we are ready to give a characterization of pointwise feedback equivalence in terms of dimensions of pointwise invariants.
Theorem 3.8. Let be Σ = (A, B) and Σ0 = (A0, B0)
two reachable linear dynamical systems of size(m, n)over
R = C(Λ,R).Forλ0 ∈ Λ,the following conditions are
equivalent.
(i) Σ(λ0) ∼ Σκ whereΣκ = (Aκ, Bκ)is the
Bruno-vsky’s linear form associated to the Kronecker’s indi-cesκ={κ1, κ2, . . . , κs}
(ii) Let beη ={n1, n2, . . . , np}the dual partition ofκ.
Then
dimRNΣ(λ0) i
=n1+n2+. . .+ni; 1≤i≤p
.
Proof. (i)⇒(ii) As (A(λ0), B(λ0)) ∼ (Aκ, Bκ) and Σκ= (Aκ, Bκ)is the Brunovsky form over the fieldK=
R, whose associated partition isκ={κ1, κ2, . . . , κs},by
Theorem 3.4 it is
Un1+n2+...+ni
˜
BΣκ i
=R
Un1+n2+...+ni+1
˜
BΣκ i
= (0) for 1≤i≤p
or equivalently
Un1+n2+...+ni
˜
BΣ(λ0) i
=R
Un1+n2+...+ni+1
˜
BΣ(λ0) i
= (0) for 1≤i≤p,
then
dimNΣ(λ0) i
= rankB˜Σ(λ0) i
=n1+n2+. . .+ni
for1≤i≤p.
(ii)⇒(i) Conversely, let beλ0∈Λsuch that
dimNΣ(λ0) i
=n1+n2+. . .+ni for 1≤i≤p,
then
rankB˜Σ(λ0) i
=n1+n2+. . .+ni= rank
˜
BΣκ i
for1≤i≤pAlso
Uj
˜
BΣ(λ0) i
=Uj
˜
BΣκ i
for 1≤i≤n, 1≤j≤n,
and thereforeΣ(λ0)is feedback equivalent toΣκ.
4
The pointwise feedback relation
Note that ifA = (fij)is a matrix overR = C(Λ,R) thenA(λ)is the matrix(fij(λ)). Let beΣ = (A, B)and Σ0 = (A0, B0)two systemsn-dimensional withminputs over R = C(Λ,R) , if Σis equivalent feedback to Σ0,
thenΣ(λ)is equivalent feedback to Σ0(λ)for allλ. The converse is not true in general, and this motivates the study of following relationship. We sayΣandΣ0 are pointwise feedback equivalent if the systemsΣ(λ) = (A(λ), B(λ))
andΣ0(λ) = (A0(λ), B0(λ))overRare feedback equiva-lents for allλ∈ Λ.Since reachability is a property that it is preserved by feedback, let us see this concept in the ring
R=C(Λ,R).
Theorem 4.1. Let beΛ a compact topological space and
Σ = (A, B)be a reachable linear dynamical system of size
(m, n)overR=C(Λ,R).Then the following conditions are equivalent.
(i) Σis reachable overC(Λ,R)
(ii) Σ(λ)is reachable overR, for allλ∈Λ.
Proof. (i)⇒(ii) IfΣis reachable inC(Λ,R)then
Un
˜
BΣ= (f1, f2, . . . , fk) = (1) =C(Λ,R),
wheref1, f2, . . . , fkare the minors of ordernof the matrix ˜
BΣ.
SinceB˜Σ(λ) = ˜BΣ(λ), it follows
Un
˜
BΣ(λ)=Un
˜
BΣ⊗C(Λ,R)/mλ=C(Λ,R)/mλ,
and in consequence rankB˜Σ(λ) = n, or equivalently
Σ(λ)is reachable for allλinΛ.
(ii)⇒(i) Conversely, assume
Un
˜
BΣ=Un B|AB|. . .|An−1B
= (f1, f2, . . . , fk),
wheref1,f2, . . . , fkare all minors of ordernof the matrix ˜
BΣ.AsΣ(λ) = (A(λ), B(λ))is reachable for allλinΛ, we haverankB˜Σ(λ)=n.
Then the set of zeroes (see below)Z(f1, . . . , fk) = ∅
is empty. Thus ideal generated by{f1, f2, . . . , fk} is the
whole ring. A fortiori f2
1 +f22 +. . .+fk2 is an unit in
C(Λ,R).ThenUn
˜
BΣ = R andΣis a reachable sy-stem.
In order to introduce the sets of invariants for pointwise feedback relationship we need to remark usual notation of ideal of zeroes of a function. Let be a an ideal ofR =
C(Λ,R).We’ll denote byZ(a)the set
Z(a) ={λ∈Λ/ f(λ) = 0 for all f ∈a}
The following result (see [8]) gives a set of invariants for the pointwise feedback relation.
Theorem 4.2. Let beΣ = (A, B)andΣ0 = (A0, B0)two reachable linear systems of type(n, m)over the ringR=
(i) SystemsΣandΣ0are pointwise feedback equivalents; that is to say,Σ(λ) andΣ0(λ) are feedback equiva-lents forλ∈Λ
(ii) For all 1 ≤ i, j ≤ n one has ZUj
˜
BΣ
i
=
ZUj
˜
BΣ0
i
1≤i≤n, 1≤j≤n
Proof. (i) ⇒ (ii). If λ ∈ ZUj
˜
BΣ
i
then
Uj
˜
BiΣ(λ) = (0)and hencedimNiΣ(λ) < j. Since
Σ(λ)andΣ0(λ)are feedback equivalent overRit follows that it is also satisfied dimNiΣ0(λ) < j which yields
λ∈ZUj
˜
BΣi0. The inverse contention is also proved because feedback equivalence is a equivalence relation, and symmetric property solves the case.
(i)⇐(ii)Let beλ∈Λ. Observe that(ii)yields that
dimNiΣ(λ)= minnj :λ∈ZUj
˜
BiΣo=
= minnj:λ∈ZUj
˜
BiΣ0
o
= dimNiΣ(λ)
ThereforeRvector spacesNiΣ(λ)andN
Σ0(λ)
i are
isomor-phic for all iand all λ ∈ Λand consequently Σ(λ) and
Σ0(λ)are feedback equivalent for allλ∈Λor equivalently systemsΣandΣ0are point wise feedback equivalents.
At this point let us see how the generation of these zeroes sets can be done by only one element.
Theorem 4.3. Sets of zeroes of finitely generated ideals of
C(Λ,R) can be obtained as the set of zeroes of a single function. That is to say, one has the following properties:
(i) Let beaa finitely generated ideal ofC(Λ,R). Then
there existsa∈asuch thatZ(a) =Z(a)
(ii) Ifa⊆bare finitely generated ideals ofC(Λ,R)then we can choosea∈aandb∈bwitha=λbsuch that
Z(a) =Z(a)⊇Z(b) =Z(b)
Proof. (i) If a is generated by f1, f2, . . . , fk with fi ∈
C(Λ,R),it is enough to consider
a=f12+f22+. . .+fk2.
(ii) Let us consider the elementsa0 ∈aandb0 ∈ b(for example, built as in the previous item) such that
Z(a) =Z(a0)⊇Z(b0) =Z(b).
The result is followed considered the elementsb =b0 ∈b
ya=a0b0∈a. Hence
Z(a) =Z(a0b0) =Z(a0)∪Z(b0) =Z(a)∪Z(b) =Z(a).
Theorem 4.4. Let beaan ideal ofC(Λ,R)generated by
f1, f2, . . . , fk. The following conditions are equivalent.
(i) a6=C(Λ,R)
(ii) Z(f1)∩Z(f2)∩. . .∩Z(fk)6=∅
(iii) f12+f22+. . .+fk2is not an unit ofC(Λ,R)
Proof. It is sufficient to note that
Z(a) =Z(f12+f22+. . .+fk2) =
Z(f1)∩Z(f2)∩. . .∩Z(fk)6=∅.
Recall that Theorem 4.2 states that then2sets given by n
ZUj
˜
BiΣ
o
for1≤i≤n,1≤j≤n,are a complete system invariants for pointwise feedback relation. We conclude this section by studying that set of invariants. Main properties are given in the next results.
First of all, note that a reachable linear system overR
verifies: Uj
˜
BiΣ =R, for allj ≤i. In terms of sets of zeroes of reachability maps, one has the following result: Theorem 4.5. Let beΣ = (A, B)a reachable linear dy-namical system of type(n, m)overR=C(Λ,R)then one hasZUj
˜
BiΣ=∅for allj≤i.
Proof. First note that since system is reachable then
Uj
˜
BΣ
i
=R.
Now, by contradiction, suppose thatλ∈ Z(UB˜iΣit follows thatf(λ) = 0for allf ∈ UB˜Σ
i
and therefore
1∈ U/ B˜iΣ, which is a contradiction.
Lemma 4.6. Let beΣκ= (Aκ, Bκ)a Brunovsky form of
type(n, m)over the fieldK.IfrankB˜Σκ i+1
< j,then
rankB˜Σκ i
< j−1
.
Proof. With the notation of Theorem 3.4 we have
rankB˜Σκ i+1
=n1+n2+. . .+ni+ni+1< j
and asni+1≥1,it is followed that
rankB˜Σκ i
=n1+n2+. . .+ni=
rankB˜Σκ i+1
−ni+1< j−ni+1≤j−1
.
Theorem 4.7. Let beΣ = (A, B)a reachable linear dy-namical system of type(n, m)with coefficients in the ring
R=C(Λ,R) then
ZUj
˜
BiΣ⊇ZUj+1
˜
Proof. It is immediate from the previous Lemma.
Theorem 4.8. Let beΣ = (A, B)a reachable dynamical system of type(n, m)overR=C(Λ,R), then
ZUj
˜
BiΣ=ZUj+1
˜
BiΣ+1forj≤2i,
where
˜
BiΣ= B|AB|. . .|Ai−1B
Proof. By means of Theorem 4.7 it is enough to prove
ZUj
˜
BiΣ⊆ZUj+1
˜
BiΣ+1.
Let beλ0 ∈ Z Uj B|AB|. . .|Ai−1B
and we consi-der the system Σ(λ0), reachable over R, then Σ(λ0) is feedback equivalent to a Brunovsky formΣκ = (Aκ, Bκ)
whereκ={κ1, κ2, . . . , κs}is a partition ofn withκ1≥
κ2≥ · · · ≥κs.
As
rank B(λ0)|A(λ0)B(λ0)|. . .|Ai−1(λ0)B(λ0)
< j
it is
rank Bκ|AκBκ|. . .|Aiκ−1Bκ
< j,
or equivalent
rank Bκ|AκBκ|. . .|Aκi−1Bκ≤j−1.
Let us see
rank Bκ|AκBκ|. . .|AiκBκ
≤j.
Arguing by contradiction, assume
rank Bκ|AκBκ|. . .|AiκBκ
> j,
we’ll have
rank AiκBκ
>1,
thenEi
1e16= 0andE2ie26= 0and it must be
i < κ1 and i < κ2. But this is the same that
i < κ2≤κ1,
and taking into account only the column system vectors li-nearly independent
e1, e2, Aκe1, Aκe2, . . . , Aκi−1e1, Aiκ−1e2
in the matrixB˜Σ
i = Bκ|AκBκ|. . .|Aiκ−1Bκ,we have rank Bκ|AκBκ|. . .|Aiκ−1Bκ
≥2i,
but, by hypothesis
rank Bκ|AκBκ|. . .|Aiκ−1Bκ
≤j−1,
then
j−1≥2i,
so that
j≥2i+ 1,
and it is contrary to the course. Therefore, it should be
rank Bκ|AκBκ|. . .|AiκBκ
≤j,
and also
rank B(λ0)|A(λ0)B(λ0)|. . .|Ai(λ0)B(λ0)≤j,
then
λ0∈Z Uj+1 B|AB|. . .|Ai−1B
.
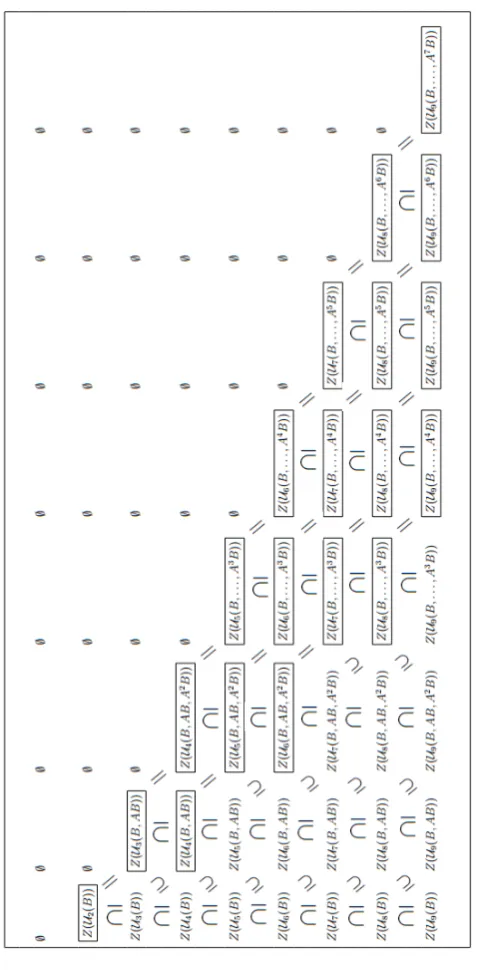
In the table at the Note 4.10, Theorem 4.7 test conten-tions chains parallel to the main diagonal, while Theorem 4.8 proves the equalities. In addition, these equalities can not be extended toj > 2i,as it is shown in the following result.
Theorem 4.9. Let beΣ = (A, B)a reachable linear dy-namical system of type (n, m) over R = C(Λ,R), and let be λ0 ∈ Λ such that Σ(λ0) ∼ Σκ where κ =
{κ1, κ2, . . . , κs},withη={n1, n2, . . . , np}the dual
par-tition associated checking
2i≤n1+n2+. . .+ni< j
< j+ 1≤n1+n2+. . .+ni+ni+1,
then
λ0∈Z
Uj
˜
BiΣ\ZUj+1
˜
BiΣ+1
Proof. By Theorem 3.4, and being
n1+n2+. . .+ni< j,
we have
Uj
˜
BΣ(λ0) i
=Uj
˜
BΣκ i
= 0,
thenλ0∈Z
Uj
˜
BΣ
i
.
Also, as
j+ 1≤n1+n2+. . .+ni+ni+1
it is
Uj+1
˜
BΣ(λ0) i+1
=Uj+1
˜
BΣκ i+1
6
= 0,
andλ0∈/ Z
Uj+1
˜
BiΣ+1.
Note 4.10. From Theorems 4.5, 4.7 and 4.8 con-tentions and equalities are deduced between sets
Figure 1.Some relations inn
Z
UjB|AB|. . .|Ai−1B
o
5
Low dimensional cases
(
n
≤
5)
For the casesn= 2, n= 3andn= 4it follows Corollary 5.1. The sets of zeroes
Z(U2(B))
are a complete set of invariants for the feedback pointwise class of the systemΣ = (A, B)reachable of type(2, m),
over the ringR=C(Λ,R).
For systems of type(3, m)we can give the similar result. Corollary 5.2. The sets of zeroes
Z(U2(B))⊇Z(U3(B))
are a complete set of invariants for the feedback pointwise class of the systemΣ = (A, B)reachable of type(3, m),
over the ringR=C(Λ,R).
Corollary 5.3. The sets of zeroes
Z(U4(B))⊇Z(U3(B))⊇Z(U4(B|AB))⊇Z(U2(B))
are a complete set of invariants for the feedback pointwise class of the systemΣ = (A, B)reachable of type(4, m),
over the ringR=C(Λ,R).
After these general reductions, there are another reducti-ons depending onn. For example in the casen= 5we can give the following result.
Theorem 5.4. Let beΣ = (A, B)a reachable linear dyn-amical system of type(5, m)over the ringR=C(Λ,R).
Then
Z(U5(B))⊇Z(U4(B))⊇Z(U5(B|AB))⊇
Z(U3(B))⊇Z(U4(B|AB))⊇Z(U2(B))
Proof. It is enough to prove
Z U5 B|AB . . .|An−1B⊇Z(U3(B))
.
Let beλ0∈Z(U3(B))thenΣ (λ0) = (A(λ0), B(λ0)) is a reachable system over the fieldK = R. By Bruno-vsky theorem,Σ (λ0)only can be equivalent feedback to a Brunovsky formΣκ= (Aκ, Bκ),whereκis one of the
following partitions forn= 5:
κ1= 3≥κ2= 2>0 or
κ1= 4≥κ2= 1>0 or
κ1= 5>0,
where U5(Bκ, AκBκ) = (0).By the feedback
equiva-lence is
U5(B(λ0), A(λ0)B(λ0)) =U5(Bκ, AκBκ) = (0),
andλ0∈Z(U5(B|AB)).
6
Conclusion
The problem of obtaining invariants in the pointwise feedback equivalence overR=C(Λ,R)has been conside-red.The next step will be to construct a canonical form for eachnand the opportunity of stratify the spaceΛsorting these invariants as a lattice. For example given the table of the Figure 1, open question is to generalize reducing results as Theorem 5.4 and can extend results to the ringCk(Λ,
R) whereΛis a differentiable manifold or to extend results to the ring of holomorphic functions
7
Acknowledgements
The Instituto Nacional de Ciberseguridad (Spanish Na-tional Institute for Cybersecurity) (INCIBE) has partially supported this work.
We are also grateful to the annonymous referee for valu-able comments.
REFERENCES
[1] Atiyah, M.F., Macdonald, I.G.Introduction to Com-mutative Algebra. Addison-Wesley.(1969).
[2] N.L. Biggs,Discrete Mathematics.(Chap. 26),Oxford University Press, (2003).
[3] J.W. Brewer, J.W. Bunce and F.S. Van Vleck, Li-near Systems over Commutative Rings,Marcel Dek-ker, New York, (1986).
[4] J. Brewer, L. Klingler, On feedback invariants for linear dynamical systems, Linear Algbera App. 325 (2001), 209-220.
[5] P.A. Brunovsky,A classification of linear controllable systems, Kybernetika3(1970), 173-187.
[6] F. Bruzelius, S. Petterson, C. Breitholtz, Linear parameter-varying descriptions of non-linear sys-tems, Proc. of the 2004 American Control Confe-rence, pp. 1374–1379.
[7] M.V. Carriegos, R.M. Garc´ıa-Fern´andez, M.M. L´opez-Cb., M.T. Trobajo, On linear multiinpul sys-tems depending on continuous parameters. Feedback equivalence in low dimension, Int. J. Modern Physics B 26(25) (2012).
[8] M. Carriegos, J.A. Hermida-Alonso and T. S´anchez-Giralda, The pointwise feedback relation for linear dynamical systems, Linear Algebra Appl.279(1998), 119-134.
[9] L. Gillman and M. Jerison, Ring of Continuous Functions,Springer, Berlin, (1976).
[10] J.A. Hermida-Alonso, M.P. P´erez and T. S´anchez-Giralda,Brunovsky’s canonical form for linear dyn-amical systems over commutative rings, Linear Alge-bra Appl.233(1996), 131-147.
[11] J.A. Hermida-Alonso, M.P. P´erez and T. S´anchez-Giralda, Feedback invariants for linear Dynamical Systems over a Principal Ideal Domain, Linear Al-gebra Appl.218(1995), 29-45.
[12] J.A. Hermida-Alonso and T. S´anchez-Giralda,Linear equations over commutative rings and determinantal ideals,J. Algebra99(1)(1986), 72-79.
[13] R.E. Kalman,Kronecker invariants and feedback, in
Ordinary Differential Equations. Academic (1972), 459-471.
[14] A.A. Mailybaev, Uncontrollability for linear auto-nomous multiinput dynamical systems depending on parameters, SIAM J. Control Optimiz. 42(4) (2003) 1431–1450.
[15] Northcott, D.G. Finite Free Resolutions. Cambridge University Press. (1976).
[16] Saez-Schwedt, Andres. (2008), Matricial de-composition of systems over rings, Electronic Journal of Linear Algebra, Volume 17. DOI: http://dx.doi.org/10.13001/1081-3810.1279
[17] E. Sontag,Linear systems over commutative rings: A survey, Ric. di Automatica7(1976), 1-34.
[18] E.D. Sontag:Mathematical Control Theory. Springer-Verlag (1990), second edition (1998).