R E S E A R C H
Open Access
Diffraction problems for quasilinear parabolic
systems with boundary intersecting
interfaces
Qi-Jian Tan
*and Chao-Yi Pan
*Correspondence: [email protected] Department of Mathematics, Chengdu Normal University, Chengdu, 611130, P.R. China
Abstract
In this paper, we discuss then-dimensional diffraction problem for weakly coupled quasilinear parabolic system on a bounded domain
, where the interfaces
k (k= 1,. . .,K– 1) are allowed to intersect with the outer boundary
∂
and the coefficients of the equations are allowed to be discontinuous on the interfaces. The aim is to show the existence of solutions by approximation method. Theapproximation problem is a diffraction problem with interfaces, which do not intersect with
∂
.MSC: 35R05; 35K57; 35K65
Keywords: diffraction problem; quasilinear parabolic system; interface; approximation method
1 Introduction
Letbe a bounded domain inRnwith boundary∂(n≥), and letbe partitioned into a finite number of subdomainsk(k= , . . . ,K) separated byk, wherek,k= , . . . ,K– , are interfaces, which do not intersect with each other. For anyT> , set
QT:=×(,T], ST:=∂×[,T], := K–
k=
k, T:=×[,T].
In this paper, we consider the diffraction problem for quasilinear parabolic reaction-diffusion system in the form
⎧ ⎪ ⎪ ⎨ ⎪ ⎪ ⎩ ul
t–Ll(ul) =gl(x,t,u) ((x,t)∈QT), [ul]
T= , [a
l
ij(x,t,ul)ulxjνi(x)]T= , ul=ψl(x,t) ((x,t)∈S
T∪ {× {}}),l= , . . . ,N,
(.)
wherex= (x, . . . ,xn),u= (u, . . . ,uN),ult:=∂ul/∂t,ulxi:=∂u
l/∂x
i,ulx:= (ulx, . . . ,u
l xn),
Llul:= d dxi
alijx,t,ululxj+bjlx,t,ululxj, l= , . . . ,N, (.)
repeated indicesiorjindicate summation from ton,ν(x) := (ν(x), . . . ,νn(x)) is the unit normal vector to(the positive direction ofν(x) is fixed in advance), the symbol [·]T
denotes the jump of a quantity acrossT, and the coefficientsalij(x,t,ul),bl
j(x,t,ul) and
gl(x,t,u) are allowed to be discontinuous onT. In the following, we refer to the conditions onTin (.) as diffraction conditions.
The diffraction problems often appear in different fields of physics, ecology, and tech-nics. In some of them, the interfaces are allowed to intersect with the outer boundary∂ (see [–]). The linear diffraction problems have been treated by many researchers (see [–]). For the quasilinear parabolic and elliptic diffraction problems, when all of the in-terfaceskdo not intersect with∂, the existence and uniqueness of the solutions have been investigated in [–] by Leray-Schauder principle and the method of upper and lower solutions. In this paper, we investigate the existence of solutions of (.) when the interfaces are allowed to intersect with∂. In this case, because of the existence of the intersection ofand∂, the methods in [–] can not be extended. We shall show the existence of solutions by approximation method. The approximation problem is a diffrac-tion problem with interfaces which do not intersect with∂.
The plan of the paper is as follows. In Sect. , we give the notations, hypotheses and an example, and state the existence theorem of the solutions. Section is devoted to the proof of the existence theorem.
2 The hypotheses, main result and example 2.1 The notations, hypotheses and main result
First, let us introduce more notations and function spaces.
For any set S, S¯ denotes its closure. The symbol⊂⊂ means that ⊂ and
dist(,∂) > . Let
{, . . . ,K–}= ∗, . . . ,K∗–
∪ ∗∗, . . . ,∗∗K–K
,
wherek∗,k= , . . . ,K– , intersect with the outer boundary∂, andk∗∗,k= , . . . ,K–
Kdo not intersect with∂. Assume that the domainis partitioned into subdomains
∗k, k= , . . . ,K, separated by interfacesk∗, and partitioned into ∗∗k,k= , . . . ,K–
K+ , separated by∗∗k. The interface of∗k and∗k+ is∗k. Then ¯ =Kk=¯∗k =
K–K+
k= ¯∗∗k. Set
Qk,T:=k×(,T] fork= , . . . ,K,
∗:= K–
k=
∗k, ∗∗:= K–K
k=
∗∗k, ∗T:=∗×[,T], T∗∗:=∗∗×[,T],
Q∗k,T:=∗k×(,T] fork= , . . . ,K,
Q∗∗k,T:=∗∗k×(,T] fork= , . . . ,K–K+ .
We see thatT=∗T∪∗∗T.
Cα(Q¯
T) is the spaces of Hölder continuous inQ¯Twith exponentα∈(, ).W() and
W,(QT) are the Hilbert spaces with scalar products (v,w)W()=
(vw+vxiwxi) dxand
(v,w)W, (QT)=
QT(vw+vtwt+vxiwxi) dxdt, respectively. Let
◦
W() := v∈W(),v|x∈∂=
, W◦ , (QT) := v∈W ,
(QT),v|(x,t)∈ST=
For the vector functions with N-components we denote the above function spaces by Cα(Q¯T),W
(),W
, (QT),
◦
W () and
◦
W,
(QT), respectively. Moreover, we recall the following.
Definition .(see [, ]) Writeuin the split form
u=ul, [u]al, [u]bl
.
The vector functiong(·,u) := (g(·,u), . . . ,gN(·,u)) is said to be mixed quasimonotone in
B⊂RN with index vector (a, . . . ,aN) if for eachl= , . . . ,N, there exist nonnegative inte-gersal,bl, satisfying
al+bl=N– ,
such thatgl(·,ul, [u]
al, [u]bl) is nondecreasing in [u]al, and is nonincreasing in [u]blfor all u∈B.
The following hypotheses will be used in this paper:
(H) (i) ∂andk,k= , . . . ,K– , are ofC+αfor some exponentα∈(, )and there
existθ∈(, )andρ> such that for every open ballKρcentered atx∈∂
and radiusρ≤ρ,
mes(Kρ∩)≤( –θ)mesKρ.
Assume that for eachk= , . . . ,K– ,
∗k:ϕk∗(x) = (x∈ ¯),
and
k
τ=
¯
∗τ–k∗= x:ϕ∗k(x) < ∩ ¯. (.)
(ii) Assume that ⎧ ⎨ ⎩
alij(x,t,ul) =alij,k(x,t,ul), blj(x,t,ul) =blj,k(x,t,u l),
gl(x,t,u) =gl
k(x,t,u) ((x,t)∈Q∗k,T,u∈RN),k= , . . . ,K,
(.)
whereal
ij,k(x,t,ul)andblj,k(x,t,ul)are defined onQ¯T×R,gkl(x,t,u)are defined
onQ¯T×RN, and all of them are allowed to be discontinuous onT∗∗.
(iii) There exist constant vectorsM= (M, . . . ,MN)andm= (m, . . . ,mN),m≤M,
such that ⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩ gl
k(x,t,Ml, [M]al, [m]bl)≤ ((x,t)∈QT), gkl(x,t,ml, [m]al, [M]bl)≥ ((x,t)∈QT), ml≤ψl(x,t)≤Ml
((x,t)∈ST∪ {× {}}),k= , . . . ,K,l= , . . . ,N,
whereal,blare all independent ofk. Let
S:= u∈C(Q¯T) :m≤u≤M.
The vector functionsgk(·,u) = (gk(·,u), . . . ,gNk(·,u)),k= , . . . ,K, are mixed
quasimonotone inSwith the same index vector(a, . . . ,aN).
(iv) For eachk= , . . . ,K,k= , . . . ,K–K+ ,l= , . . . ,N,alij,k(x,t,ul),
blj,k(x,t,ul)∈C+α(Q¯∗∗k,T×R)(i,j= , . . . ,n),gkl(x,t,u)∈C+α(Q¯∗∗k,T×S).
There exist a positive nonincreasing functionν(θ)and a positive nondecreasing functionμ(θ)forθ∈[, +∞)such that
νul
n
i=
ξi ≤alij,kx,t,ulξiξj≤μul n
i=
ξi, (.)
alij,k=alji,k, alij,kx,t,ul;blj,kx,t,ul≤μul, i,j= , . . . ,N. (.)
For eachl= , . . . ,N,ψl(x,t)∈Cα(¯ ×[,T])∩W,
(×(,T))for some
domainwith⊂⊂,ψl(x, )∈C+α(¯k)(k= , . . . ,K), and the following
compatibility condition on∗∗holds:
alijx, ,ψl(x, )ψxlj(x, )νi(x)
∗∗= . (.)
Definition . A functionu is said to be a solution of (.) ifu possesses the follow-ing properties: (i) For someα∈(, ),u∈Cα(Q¯
T)∩C,(Qk,T),k= , . . . ,K. For any given ⊂⊂ andt∈(,T), there existsα, <α< , such thatut ∈Cα
(¯×[t,T]) and
uxj∈L(QT)∩C
α((¯∩ ¯k)×[t,T]),k= , . . . ,K,j= , . . . ,n; (ii)usatisfies the equations
in (.) for (x,t)∈Qk,T,k= , . . . ,K, the diffraction conditions for (x,t)∈T∩QTand the parabolic boundary conditions for (x,t)∈ST∪(× {}).
The main result in this paper is the following existence theorem.
Theorem . Let Hypothesis(H)hold.Then problem(.)has a solutionuinS.
2.2 An example
We next give an example satisfying the conditions in Hypothesis (H).
Example . In problem (.), let
n= , ϕ= (x)+ (x)– , ϕ=x+ (x)+ ,
ϕ=x– (x)– , ϕ= (x– )+ (x)– ,
∂:ϕ= , :ϕ= (x∈I), :ϕ= (x∈I), :ϕ= ,
whereI= [–(
√
– )/, –] andI= [, (
√
– )/], and let
:ϕ< , :ϕ< ,ϕ< , :ϕ< ,ϕ> ,ϕ< ,
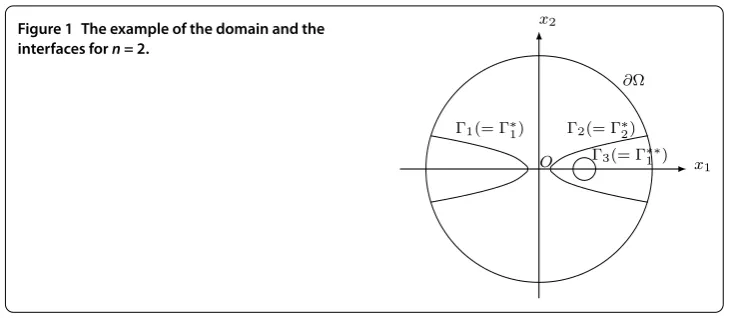
Figure 1 The example of the domain and the interfaces forn= 2.
The outer boundary of domain is a circle of radius with the center at the origin, whereas the interface curves are two parabolas and a smaller circle of radius (see Figure ). We see thatandintersect with∂, anddoes not.
For the coefficients of the equations and the boundary values in (.) we set
alijx,t,ul=
⎧ ⎨ ⎩
AlkEl(ul), i=j,
, i=j ((x,t)∈Qk,T,u
l∈R),k= , , , ,i,j= , ,
bljx,t,ul≡ (x,t)∈QT,ul∈R
,j= , ,
gl(x,t,u) =rlkulfkl(u) (x,t)∈Qk,T,u∈RN
,k= , , , ,
ψl(x,t)≡ol, l= , . . . ,N,
where
fkl(u) = – N
l=
δll,kul forl= , . . . ,N– , fkN(u) = + N–
l=
δlN,kul–δNN,kuN,
El(ul)∈C(R) withEl(ul)≥ν, andν,Alk,rkl,δll,k ando
l are all positive constants for
k= , , , ,l,l= , . . . ,N. Then
∗=, ∗=, ∗=, ∗=, ∗:ϕ< ,ϕ> ,
∗∗ =, ∗∗ :ϕ< ,ϕ> , ∗∗ =.
For eachl= , . . . ,N, let
alij,kx,t,ul= (x,t)∈QT,ul∈R,i= j,i,j= , ,k= , , ,
alii,kx,t,ul=AlkElul (x,t)∈QT,ul∈R,i= , ,k= , ,
alii,x,t,ul=
⎧ ⎨ ⎩ Al
El(ul) ((x,t)∈Q∗∗,T,ul∈R),
AlEl(ul) ((x,t)∈Q∗∗
,T,ul∈R),
i= , ,
gl(x,t,u) =
⎧ ⎨ ⎩
rlulfl(u) ((x,t)∈Q∗∗,T,u∈RN),
rl
ulfl(u) ((x,t)∈Q∗∗,T,u∈RN).
We find that these functions satisfy (.) and the hypothesis (iv) of (H). Setm= (, . . . , ). Then the requirements onMin (.) become
–δll,kMl≤, Ml≥ol,l= , . . . ,N– .
+ N–
l=
δNl,kMl
–δNN,kMN≤, MN≥oN.
It follows from these inequalities that there exist positive constant vector M, such that
mandMsatisfy (.). Furthermore, the vector functionsgk(·,u) = (gk(·,u), . . . ,gkN(·,u)),
k= , , , are mixed quasimonotone inSwith the same index vector (, . . . , ,N– ). The above arguments show that the conditions in Hypothesis (H) can be satisfied.
3 The proof of the existence theorem 3.1 Preliminaries
Lemma . The following statements hold true:
(i) For any givenx∈ ¯,ifϕk∗
(x)≤for somek
∈ {, . . . ,K– },then
ϕθ∗(x) < for allθ∈ k+ , . . . ,K–
.
(ii) There exists a positive numberεsuch that for any givenk∈ {, . . . ,K– },if ≤θ≤k– ,then
ϕθ∗(x)≥ε for allx∈ y:ϕ∗k(y)≥
∩ ¯.
Proof By (.), ifx∈ ¯andϕ∗
k(x)≤, thenx∈
k
τ=¯∗τ. Thus for eachθ=k+, . . . ,K–,
x∈θτ=¯∗τ–θ∗. Again by (.) we getϕθ∗(x) < . This proves the result in (i).
For any givenk∈ {, . . . ,K– }, ifx∈ ¯andϕk∗(x)≥, then it follows from (i) that
ϕ∗θ(x) > for allθ∈ {, . . . ,k– }. Sinceϕθ∗∈C+α, there exist positive constantsε
k,θsuch
that
ϕθ∗(x)≥εk,θ for allx∈ y:ϕ∗k(y)≥∩ ¯.
Hence, the conclusion in (ii) follows from the above relation by takingε:=mink,θεk,θ.
For an arbitraryε, <ε<ε, letsε=sε(θ) be smooth function with values between and such that|ddθsε(θ)| ≤C/εfor allθ ∈R,sε(θ) = forθ ≤ andsε(θ) = forθ ≥ε. Define
zε,k(x) :=
⎧ ⎪ ⎪ ⎨ ⎪ ⎪ ⎩
K–
τ= sε(ϕ∗τ(x)) (x∈ ¯),k= , K–
ϑ= [ –sε(ϕϑ∗(x))] (x∈ ¯),k=K,
K–
τ=k sε(ϕ∗τ(x)) k–
ϑ=[ –sε(ϕ∗ϑ(x))] (x∈ ¯),k= , . . . ,K– .
Lemma . zε,k(x),k= , . . . ,K,are smooth functions with values betweenand,and
possess the property
K
k=
zε,k(x) = (x∈ ¯). (.)
Let functionsηk(x),k= , . . . ,K,be defined on¯,and let
ηε(x) =
K
k=
ηk(x)zε,k(x) (x∈ ¯). (.)
Then for any x∈ ¯,
ηε(x) = ⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩
η(x) ifϕ∗(x)≤,
ηK(x) ifϕK∗–(x)≥ε,
ηk(x) ifϕk∗–(x)≥εandϕk∗(x)≤for some k∈ {, . . . ,K– },
ηk–(x)sε(ϕk∗–(x)) +ηk(x)[ –sε(ϕ∗k–(x))]
if <ϕk∗–(x) <εfor some k∈ {, . . . ,K– }.
(.)
Proof Since (.) is a special case of (.) withηk(x)≡ for allk∈ {, . . . ,K}, we only prove (.).
Case . Ifϕ∗(x)≤, then the conclusion of (i) in Lemma . implies thatϕk∗(x)≤ and
sε(ϕk∗(x)) = for allk∈ {, . . . ,K– }. (.) yields thatzε,(x) = andzε,k(x) = fork≥. These, together with (.), imply thatηε(x) =η(x).
Case . IfϕK∗
–(x)≥ε, then the conclusion of (ii) in Lemma . shows thatϕ
∗
k(x)≥ε andsε(ϕk∗(x)) = for allk∈ {, . . . ,K– }. Hence,zε,K(x) = andzε,k(x) = for allk∈
{, . . . ,K– }. Again by (.) we getηε(x) =ηK(x).
Case . Ifϕk∗(x)≤ andϕk∗–(x)≥εfor somek∈ {, . . . ,K– }, then Lemma . yields thatϕ∗τ(x)≤,sε(ϕτ∗(x)) = for allτ∈ {k, . . . ,K– }, and thatϕτ∗(x)≥ε,sε(ϕτ∗(x)) =
for allτ∈ {, . . . ,k– }. Hence,zε,k(x) = andzε,τ(x) = forτ= k. Therefore,ηε(x) =
ηk(x).
Case . If <ϕ∗k–(x) <εfor somek∈ {, . . . ,K– }, then it follows from Lemma . thatϕτ∗(x) >εandsε(ϕτ∗(x)) = for allτ∈ {, . . . ,k– }, and thatϕ∗k(x) < . Again by the conclusion of (i) in Lemma . we haveϕτ∗(x) < andsε(ϕτ∗(x)) = for allτ∈ {k, . . . ,K– }. Hence,zε,k(x) = –sε(ϕk∗–(x)),zε,k–(x) =sε(ϕk∗–(x)) andzε,τ(x) = forτ=k,k– .
Thus,ηε(x) =ηk–(x)sε(ϕk∗–(x)) +ηk(x)[ –sε(ϕ∗k–(x))].
3.2 The approximation problem of (1.1)
In this subsection, we construct a problem to approximate (.). For eachl= , . . . ,N, let
⎧ ⎪ ⎪ ⎨ ⎪ ⎪ ⎩
alijε=alijε(x,t,ul) := K
k=a l ij,k(x,t,u
l)zε ,k(x),
bl
jε=bljε(x,t,ul) := K
k=blj,k(x,t,ul)zε,k(x),
gεl=glε(x,t,u) := K
k=g l
k(x,t,u)zε,k(x) ((x,t)∈QT).
It follows from hypothesis (iv) of (H), (.) and (.) that alijε(x,t,ul), bljε(x,t,ul) are in C+α(Q¯∗∗
k,T×R) (i,j= , . . . ,n),gεl(x,t,u) is inC+ α(Q¯∗∗
k,T×S) (k= , . . . ,K–K+ ), the vector functiongε(·,u) = (g
ε(·,u), . . . ,gεN(·,u)) is mixed quasimonotone inSwith
in-dex vector (a, . . . ,aN), and
νul
n
i=
ξi ≤alijε
x,t,ulξiξj≤μul n
i=
ξi, (.)
alijε=aljiε, alijε
x,t,ul;bljε
x,t,ul≤μul, i,j= , . . . ,n. (.)
We note that the functionsal
ijε(x,t,ul),bljε(x,t,ul) andgεl(x,t,u) are continuous onT∗, and are allowed to be discontinuous onT∗∗.
For eachk= , . . . ,K–K, there exists∗τk such that∗∗k ⊂∗τk. Take two subdo-mainsBk,, Bk,satisfyingk∗∗ ⊂Bk,⊂⊂Bk,⊂⊂∗τk. Letλk=λk(x) be an arbi-trary smooth function taking values in [, ] such thatλk= forx∈/∗τk andλk= for
x∈Bk,. Set
ψεl =ψεl(x,t)
:=
|x–y|≤ε
ω|x–y|
– K–K
k=
λk(y)
ψl(y,t) dy+ K–K
k=
λk(x)ψl(x,t) (.)
with a sufficiently smooth nonnegative averaging kernelω(|ξ|) that is equal to zero for
|ξ| ≥ and is such that|ξ≤ω(ξ) dξ = . Then from the hypothesis (iv) of (H) and [, Chapter II] we know that for eachl= , . . . ,N,ψεl(x,t) is inCα(Q¯
T)∩W,(QT),ψεl(x, )
is inC+α(¯∗∗
k) (k= , . . . ,K–K+ ),ψεl→ψl inCα(Q¯T) andψεl→ψlinW
, (QT). Thus,
ψεl(x,t)Cα(Q¯T)+ψ
l
εW,
(QT)≤μ, (.)
whereμis a positive constant, independent ofε. Furthermore, (.), (.) and (.) show that for small enoughε,
alijε
x,t,ul=alij,τk
x,t,ul,
ψεl(x,t) =ψl(x,t) (x,t)∈Bk,×[,T]
,k= , . . . ,K–K.
These, together with (.), imply that
aijε
x, ,ψεl(x, )ψεlx
j(x, )νi
∗∗= . (.)
For any givenε, <ε<ε, consider the approximation diffraction problem of (.)
⎧ ⎪ ⎪ ⎨ ⎪ ⎪ ⎩ ul
t–Llε(ul) =gεl(x,t,u) ((x,t)∈QT), [ul]∗∗T = , [alijε(x,t,ul)ulxjνi(x)]∗∗T = , ul=ψεl(x,t) ((x,t)∈ST∪ {× {}}),l= , . . . ,N,
where
Llε
ul:= d dxi
alijε
x,t,ululxj+bljε
x,t,ululxj.
We note that the interfaces in (.) arek∗∗(k= , . . . ,K–K) which do not intersect with
∂. In view of (.), the compatibility condition on∗∗holds.
Proposition . Problem(.)has a unique piecewise classical solutionuε=uε(x,t)in
Spossessing the following properties:
uε∈Cα(Q¯T), uεt∈Cα,α/(Q¯T), uεxj∈C
α,α/Q¯∗∗
k,T α∈(, )
,
uεxjt∈L
(Q
T), uεxixj∈C
Q∗∗k,T, k= , . . . ,K–K+ .
(.)
Proof Problem (.) is a special case of [, problem (.)] without time delays. Formulas (.) and (.) show thatu˜=M,uˆ=mare a pair of bounded and coupled weak upper and lower solutions of (.) in the sense of [, Definition .]. We find that the conditions of [, Theorem .] are all fulfilled. Then from [, Theorem .], we obtain that problem (.) has a unique piecewise classical solutionuε=uε(x,t) inSpossessing the properties
in (.).
3.3 The uniform estimates ofuε
In the following discussion, letKρbe an arbitrary open ball of radiusρwith center atx, and letQρbe an arbitrary cylinder of the formKρ×[t–ρ,t].
For each l= , . . . ,N, consider the equality tt
[u
l
εt –Llε(uεl)]ηldxdt= t
t
g
l
ε(x,t, uε)ηldxdtfor any functionηl=ηl(x,t) from W◦ ,
(QT) withess supQT|η
l|<∞ and for
anyt,tfrom [,T]. In view ofuε∈S, it follows from (.), (.), (.) and the formula of
integration by parts that
ulεηldx
t t + t t
–ulεηlt+alijε
x,t,ulε
ulεxjη
l xi
dxdt
= t t
–bljεx,t,ulεulεxj+gεl(x,t,uε)
ηldxdt (.)
≤C t t ul
εx+ ηldxdt. (.)
Similarly, for anyφl∈W◦ () and for everyt∈[,T] we get
alijε
x,t,ulε
ulεxjφ
l xidx=
–ulεt–bljε
x,t,ulε
ulεxj+g
l
ε(x,t,uε)
φldxdt. (.)
Lemma . There exist constants α ( < α < ) and C depending only on M (:=
max(|M|,|m|)),ρ,θ,α,ν(M),μ(M)andμ,independent ofε,such that
ulεCα,α/(Q¯T)≤C, (.)
ulεxL(Q
Proof (.) follows from (.), (.), (.), (.) and [, Chapter V, Theorem . and Remark .]. Settingηl=ul
ε–ψεl in (.) and using Cauchy’s inequality, we can obtain
(.).
Lemma . For any given k∈ {, . . . ,K},let D⊂⊂∗k
and t
∈(,T).Then there exist positive constantsα( <α< )and C(d,t)depending only on d (:=dist(D,∂∗k
)),t
and the parameters M,ρ,θ,α,ν(M),μ(M)andμ,independent ofε,such that for
any∗∗ksatisfying D∩∗∗k=∅,
ulεxjCα((D∩∗∗k)×[t,T])≤C
d,t, j= , . . . ,n,l= , . . . ,N, (.)
ulεtCα(D¯×[t,T])≤C
d,t, l= , . . . ,N. (.)
For any given k∈ {, . . . ,K},let⊂⊂k and t∈(,T).Then there exist positive
con-stants α ( <α< ) and C(d,t)depending only on d (:=dist(,∂k)),tand the
parameters M,ρ,θ,α,ν((M)),μ(M)andμ,such that
ulεC+α,+α/(¯×[t,T])≤C
d,t, l= , . . . ,N. (.)
Proof Choose a subdomainBsatisfyingD⊂⊂B⊂⊂∗k
. (.) and (.) show that for
small enoughε,
⎧ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎩ al
ijε(x,t,ul) =alij,k(x,t,u l),
bl
jε(x,t,ul) =blj,k(x,t,u l),
gl
ε(x,t,u) =gkl
(x,t,u) ((x,t)∈B×(,T]),l= , . . . ,N.
(.)
Then the same proofs as those of [, formulas (.) and (.)] give (.) and (.). If ⊂⊂k, then⊂⊂∗k
∩
∗∗kfor somek∈ {, . . . ,K},k∈ {, . . . ,K–K+ }. Hence, the conclusion in (.) follows from (.), (.), (.) and the same argument as that
for [, formula (.)].
In the rest of this subsection, letkbe an arbitrary fixed number in{, . . . ,K– }, and let
D⊂⊂be an arbitrary fixed subdomain satisfyingD∩k∗
=∅,
¯ D∩(k∗
–∪
∗
k+) =
∅andD¯∩∗∗=∅. We next investigate the uniform estimates in the neighborhood of
∗k
∩ ¯D. Letx
be any point of∗
k∩ ¯D. [, Chapter , Section ] and [] show that there exists a ballKρwith center atxsuch that we can straighten∗
k∩Kρout by introducing a local coordinate systemy=y(x). Our assumptions concerningimply that we can divide ∗
k∩ ¯D into a finite number of pieces and to introduce for each of them coordinatesy. Since the investigations in the rest of this subsection are local properties, we can assume without loss of generality that the interfacek∗
lies in the planexn= . Then by (.), when
(x,t)∈D×[,T] the coefficients of problem (.) can be represented in the form
⎧ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎩ al
ijε(x,t,ul) =alij,k
(x,t,u
l)sε(xn) +al
ij,k+(x,t,u
l)[ –sε(xn)],
bl
jε(x,t,ul) =blj,k(x,t,u l)sε(x
n) +blj,k
+(x,t,u
l)[ –sε(x n)],
gεl(x,t,u) =gkl
(x,t,u)sε(xn) +g
l
k+(x,t,u)[ –sε(xn)], l= , . . . ,N,
and the diffraction conditions on∗Tin problem (.) can be represented in the form
ul∗
T= ,
alnjx,t,ululxj∗
T= , l= , . . . ,N. (.)
Lemma . Let t∈(,T).Then there exist positive constantsα( <α< )and C(d,t)
depending only on d(:=min{dist(D,∂),dist(D,k∗
–∪
∗
k+),dist(D,
∗∗)}),t,and the parameters M,ρ,θ,α,ν(M),μ(M)andμ,independent ofε,such that
ulεxsCα(D¯×[t,T])≤C
d,t, s= , . . . ,n– , (.)
εl,n
Cα(D¯×[t,T])≤C
d,t, εl,n:=alnjε
x,t,ulε
ulεxj, (.) ulεtCα(D¯×[t,T])≤C
d,t, l= , . . . ,N. (.)
Proof It follows from (.) and Hypothesis (H) that
∂alijε(x,t,ul)
∂xs
;∂a l ijε
∂t ;
∂alijε
∂ul
+∂b
l
jε(x,t,ul)
∂xs ;∂b
l jε
∂t ;
∂bljε
∂ul
+∂g
l
ε(x,t,u)
∂xs ;∂g
l
ε
∂t ;
∂gl
ε
∂ul
≤C (x,t)∈ ¯D×[,T],u∈S
,s= , . . . ,n– ,l,l= , . . . ,N, (.)
and from the equations in (.) that
ddxnalnjεx,t,ulεulεxj≤C
ulεt+ n–
s= n
j=
ulεxjxs+ulεx+
(x,t)∈ ¯D×[,T]
,l= , . . . ,N. (.)
Then using (.), (.), (.), (.) and (.), we can prove (.)-(.) by a slight modification of the proofs of [, formulas (.) and (.)]. The detailed proofs are
omit-ted.
3.4 The proof of Theorem 2.1
From estimates (.), (.) and the Arzela-Ascoli theorem it follows that we can find a subsequence (we retain the same notation for it){uε}such that{uε}converges inC(Q¯T) to
uand{uεxj}converges weakly inL(QT) touxj for eachj= , . . . ,n. Thenu∈C
α(Q¯T) and
uxj∈L(Q
T). Furthermore, the parabolic boundary conditions foruεin (.) imply that usatisfies the parabolic boundary conditions in (.).
For any givenk∈ {, . . . ,K}, and for any⊂⊂k,t∈(,T), (.) yields that there exists a subsequence{uε}(denoted by{uε} still) such that{uε}converges in C,(¯×
[t,T]) tou. By lettingε→, from (.) and the equationsul
εt–Llε(ulε) =gεl(x,t,uε) in
(.) we get that
ult–Llul=gl(x,t,u) (x,t)∈×t,T,l= , . . . ,N.
Sinceandtare arbitrary, thenusatisfies the equations in (.) for (x,t)∈Qk,T. For any givenk∈ {, . . . ,K}and for anyD⊂⊂∗k
,t
∈(,T), we see from (.), (.)
and for any∗∗ksatisfyingD∩k∗∗=∅,{uεxj}converges inC((D∩∗∗k)×[t,T]) touxj,
and{uεt}converges inC(D¯×[t,T]) tout. Hence
uxj∈C αD
∩∗∗k×t,T, ut∈Cα
¯ D×
t,T. (.)
By lettingε→ we conclude from (.) and the diffraction conditions onT∗∗foruεin
(.) that
ul∗∗
T∩QT= ,
alijx,t,ululxjνi(x)∗∗
T∩QT= , l= , . . . ,N. (.)
For any givenk∈ {, . . . ,K– }andD⊂⊂satisfyingD∩∗k
=∅,
¯ D∩(k∗
–∪
∗k
+) =∅and
¯
D∩∗∗=∅, the estimates (.)-(.) imply that for any givent∈(,T) there exists a subsequence{uε}(denoted by{uε}still) such that for eachs= , . . . ,n– , l= , . . . ,N,
ulεxs→u
l
xs, u
l
εt→ult, εl,n=alnjε
x,t,ulε
ulεxj→
l inCD¯
×
t,T.
(.)
Then
ulxs,ult,l∈CαD¯
×
t,T. (.)
We next show thatl=al
nj(x,t,ul)ulxj. For anyη=η(x,t)∈L
(D
×(t,T)),
T
t
D
alnjεx,t,ulεulεxj–alnjx,t,ululxjηdxdt
= T t D
alnjεx,t,ulε–alnjεx,t,ululεx jηdxdt
+ T t D alnjε
x,t,ul–alnjx,t,ululεxjηdxdt
+
T
t
D
alnjx,t,ululεxj–u
l xj
ηdxdt
:=Iεl,+Iεl,+Iεl,.
By (.), (.), we get
Iεl,≤Culε–ul
ηL(D
×(t,T))u
l
εxjL(D ×(t,T))
≤Culε–ulηL(D
×(t,T))→ asε→,
and by (.), (.),
Il
ε, =
T
t
D∩{x|≤xn≤ε}
al nj,k
x,t,ul–al nj,k+
x,t,ulsε(x
n)ulεxjηdxdt
≤ CulεxjL(D ×(,T))
T
t
D∩{x|≤xn≤ε}
≤ C
T
t
D∩{x|≤xn≤ε}
ηdxdt /
→ asε→.
Since{uεxj}converges weakly inL
(QT) tou
xj for eachj= , . . . ,n, thenI
l
ε,→ asε→. Hence,εl,n=alnjε(x,t,ulε)ulεxjconverges weakly inL
(D
×(t,T)) toalnj(x,t,ul)ulxjfor each j= , . . . ,n. This, together with (.), implies that
l=alnjx,t,ululxj∈CαD¯
×
t,T, (.)
andusatisfies the diffraction conditions on∗T∩QTin (.).
In view of (.)usatisfies the diffraction conditions onT∩QTin (.). Furthermore, (.), (.) and (.) imply that for anyk∈ {, . . . ,K},⊂⊂,
uxj∈C
α∩
k
×t,T, ut∈Cα
¯
×t,T, j= , . . . ,n
for someα∈(, ). Therefore,uis a solution of (.). This completes the proof of Theo-rem ..
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors read and approved the final manuscript.
Acknowledgements
Dedicated to Professor Hari M Srivastava.
The authors would like to thank the reviewers and the editors for their valuable suggestions and comments. The work was supported by the research fund of Department of Education of Sichuan Province (10ZC127) and the research fund of Chengdu Normal University (CSYXM12-06).
Received: 19 January 2013 Accepted: 9 April 2013 Published: 22 April 2013 References
1. Ladyzenskaya, OA, Solonnikov, VA, Ural’ceva, NN: Linear and Quasilinear Equations of Parabolic Type. Am. Math. Soc., Providence (1968)
2. Ladyzenskaya, OA, Ural’ceva, NN: Linear and Quasilinear Elliptic Equations. Academic Press, New York (1968) 3. Ladyzenskaya, OA, Ryvkind, VJ, Ural’ceva, NN: Solvability of diffraction problems in the classical sense. Tr. Mat. Inst.
Steklova92, 116-146 (1966) (in Russian)
4. Yi, FH: Global classical solution of Muskat free boundary problem. J. Math. Anal. Appl.288, 442-461 (2003) 5. Druet, PE: Global Lipschitz continuity for elliptic transmission problems with a boundary intersecting interface.
Weierstrass Institute for Applied Analysis and Stochastics, WIAS Preprint No. 1571 (2010)
6. Kamynin, LI: On the linear Verigin problem. Dokl. Akad. Nauk SSSR150, 1210-1213 (1963) (in Russian)
7. Kamynin, LI: The method of heat potentials for a parabolic equation with discontinuous coefficients. Sib. Mat. Zh.4, 1071-1105 (1963) (in Russian)
8. Chen, Z, Zou, Z: Finite element methods and their convergence for elliptic and parabolic interface problems. Numer. Math.79, 175-202 (1998)
9. Huang, J, Zou, J: Some new a priori estimates for second-order elliptic and parabolic interface problems. J. Differ. Equ. 184, 570-586 (2002)
10. Evans, LC: A free boundary problem: the flow of two immiscible fluids in a one-dimmensional porous medium. I. Indiana Univ. Math. J.26, 914-932 (1977)
11. Rivkind, V, Ural’tseva, N: Classical solvability and linear schemas for the approximated solutions of the diffraction problem for quasilinear elliptic and parabolic equations. Mat. Zametki3, 69-111 (1972) (in Russian)
12. Boyadjiev, G, Kutev, N: Diffraction problems for quasilinear reaction-diffusion systems. Nonlinear Anal.55, 905-926 (2003)
13. Tan, QJ: Systems of quasilinear parabolic equations with discontinuous coefficients and continuous delays. Adv. Differ. Equ.2011, Article ID 925173 (2011). doi:10.1155/2011/925173
14. Tan, QJ, Leng, ZJ: The method of upper and lower solutions for diffraction problems of quasilinear elliptic reaction-diffusion systems. J. Math. Anal. Appl.380, 363-376 (2011)
doi:10.1186/1687-2770-2013-99