IJEDR1604040 International Journal of Engineering Development and Research (www.ijedr.org) 248
Speed Control of Brushless DC Motor Using Soft Computing
Techniques
Dipakkumar G. Lalwani
1, Nirali A. Rathod
2Department of Electrical Engineering
Sardar vallabhbhai Patel Institute of Technology, Vasad.
Abstract:- The main objective of this project is controlling speed of BLDC motor. The BLDC motor has various application used in industries like in drilling, lathes, spinning, elevators and etc. The speed control of the BLDC motors is very essential. This proposed system provides a very precise and effective speed control system. Brushless DC Motor is used in wide range of applications due to its numerous advantages. In this project, we used Fuzzy Logic Controller & Neural Network for control the speed. Though conventional controllers are also used but they do not possess the accurate answer. We used MATLAB Simulink for simulation.
Keywords:- Brushless DC motor, Fuzzy Logic Controller, PI Controller MATLAB.
I. INTRODUCTION
Brushless DC (BLDC) motor drives have been widely used in Aeronautics, Electric vehicles, robotics, and food & chemical industies. P, PI,& PID controller are being used with the BLDC motor drive control system to achieve satisfactory transient and steady state response. Now a days PID & FUSSY logic controllers are maincontroller being used to control BLDC. It is essential to know the exact mathamatical model of the system or response of the system for designing these controller. the permanent magnet brushless motors are categorized into two kinds depending upon the back emf waveform, brushless ac (pmblac) and permanent magnet brushless dc (pmbldc) motors. pmbldc motors have trapezoidal back emf and quasi-rectangular current waveform. fuzzy logic and artificial neural network can be considered as a mathematical theory combining probability theory, multi-valued logic and artificial intelligence for simulation of the human approach in the solution of various problems by using an approximate reasoning to relate different data sets and to make decisions.
II. WHAT IS BLDC?
Conventional motors Brushless motors
Mechanical structure
Field magnets on the stator
Field magnets on the rotor similar to AC synchronous motor
Distinctive features
Quick response and excellent controllability
Long lasting
Easy maintenance(usually no maintenance required )
Winding connections
Ring connection The Simplest:∆
connection
The highest grade:∆ or
ү- connected Three phase-connection Normal: ү-connected Three-phase winding with grounded neutral
point or four-phase connection
The simplest: Two-phase connection
Commutation method
Mechanical Contact Between brushes and
commutator
Electronic switching using transistors
Detecting method
of rotor’s position Automatically detected By brushes
Hall element, optical encoder, Etc.
Reversing method By a reverse of terminal
Voltage
Rearranging logic sequencer
IJEDR1604040 International Journal of Engineering Development and Research (www.ijedr.org) 249
III. WHAT IS SOFT COMPUTING?
Soft computing differs from conventional (hard) computing in that, unlike hard computing, it is tolerant of imprecision, uncertainty, partial truth, and approximation. In effect, the role model for soft computing is the human mind.
The guiding principle of soft computing is: –
Exploit the tolerance for imprecision, uncertainty, partial truth, and approximation to achieve tractability, robustness and low solution cost:
IV. MATHEMATICAL MODELING OF BLDC
Modeling of Brushless DC Motor:
The construction of BLDC motor is similar to the AC motor, known as the permanent magnet synchronous motor. The stator windings are similar to those in a poly phase AC motor, and the rotor is composed of one or more permanent magnets. BLDC motors are different from AC synchronous motors in that the former incorporates some means to detect the rotor position (or magnetic poles) to produce signals to control the electronic switches as shown in Fig. The most common position/pole sensor is the Hall element, but some motors use optical sensors.
Figure: 1 Diagram of The system
Mathematical Modeling of BLDC motor drive system:
Typical mathematical modeling of the motor is described by the following equation,
uc
ub
ua
R
R
R
0
0
0
0
0
0
ec
eb
ea
ic
ib
ia
dt
d
M
L
M
L
M
L
ic
ib
ia
m m m0
0
0
0
0
0
Where R & M is the resistance & mutual inductance of the stator, & ux, ix & ex are the phase voltage, phase current & back emf voltage of the stator.
Electromagnetic torque is expressed by,
)
(
2
e a a b b c cp
e
e
i
e
i
e
i
Z
T
Where
e &Z
p are the electrical speed & number of magnetic poles.The motion equation is expressed as,
dt
d
and
Bw
T
T
j
p
dt
dw
r l e m
)
)(
2
/
(
w
rIJEDR1604040 International Journal of Engineering Development and Research (www.ijedr.org) 250
)
(
)
(
)
(
c b a
f
f
f
E
ec
eb
ea
,
(
E
K
e
r)
Where
K
e is the back emf constant &f
a(
),
f
b(
)
andf
c(
)
are the function of rotor position.V. MATHEMATICAL MODELLING SIMULINK INTO MATLAB
Figure: 2 Mathematical model of bldc motor
Figure: 3 Simulink model of BLDC motor
IJEDR1604040 International Journal of Engineering Development and Research (www.ijedr.org) 251 Figure: 5 Block diagram inside the subsystem with PI controller
Figure: 6 simulink model of bldc motor using fuzzy logic controller
VI. FUZZY LOGIC CONTROLLER
A fuzzy logic controller is a control system based on fuzzy logic- a mathematical system that analyzes analog input values in terms of logical variables that take on continuous values between 0 and 1. Fuzzy logic is a thinking process or problem solving control methodology to control systems when inputs are either imprecise or the mathematical models are not present at all. Fuzzy logic can be represented by a membership function. A membership function (MF) is a curve that defines how each point in the input space is mapped to a membership value (or degree of membership) between 0 and 1.
Figure: 7 Block diagram of Fuzzy logic controller
1. Fuzzification : It converts the crisp numerical values into the degree of membership related to fuzzy sets. 2. Rule base and inference engine: The rules are defined as,
If error A and change in error is B the output is C.
• Fuzzy inference is the process of formulating the mapping from a given input to an output using fuzzy logic. 3. Defuzzification : It is the process that convert linguistic variables into crisp value.
VII. FUZZY MEMBERSHIP FUNCTIONS
IJEDR1604040 International Journal of Engineering Development and Research (www.ijedr.org) 252 Figure : 8 Membership Function Of Flc
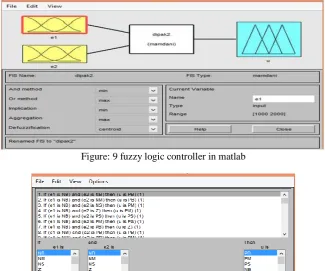
VIII. FUZZY MEMBERSHIP FUNCTIONS IN MATLAB
Figure: 9 fuzzy logic controller in matlab
Figure: 10 The fuzzy inference operation is implemented by using the 4 rules
IX. PROGRAMMING FOR EMF GENERATOR
function y=emf_generator(theta) if (theta>-180)&&(theta<=-120)
y=[-1;0;1];
elseif(theta>-120)&&(theta<=-60) y=[0;-1;1];
elseif(theta>-60)&&(theta<=0) y=[1;-1;0];
elseif(theta>0)&&(theta<=60) y=[1;0;-1];
elseif(theta>60)&&(theta<=120) y=[0;1;-1];
IJEDR1604040 International Journal of Engineering Development and Research (www.ijedr.org) 253 end
X. SIMULATION RESULTS
Figure: 11 waveforms of phase currents(Iabc)
Figure.: 12 waveforms of phase EMF(eabc)
Figure: 13 waveforms of speed(w) using PI controller
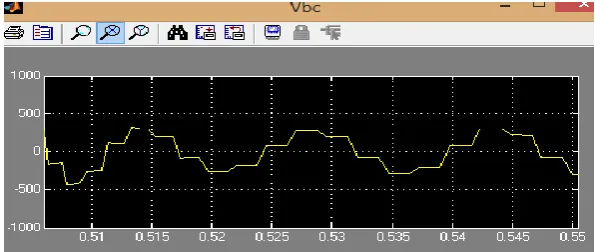
IJEDR1604040 International Journal of Engineering Development and Research (www.ijedr.org) 254 Figure : 15waveforms of phase voltage Vab & Vbc
Conclusion
Using mathematical modeling of BLDC simulink model has been developed. By applying PI controller oscillations are found in the steady state value. So to reduce the oscillation fuzzy logic controller has been implemented. By applying fuzzy logic controller oscillation are reduce after some times and speed of the bldc motor should be constant
References
PAPERS1.
Yongjian Lv, Hu Fan,Qiang Zou ,JingWan”Brushless DC Motor Speed Control System Based on Fuzzy Neural Network Control” Proceedings of the 2009 International Workshop on Information Security and Application(IWISA 2009) Proceedings of the 2009 International Workshop on Information Security and Application
(IWISA 2009)
2.
M. V. Ramesh, J. Amarnath, S. Kamakshaiahand G. S. Rao.” Speed Control of Brushlees DC Motor by using Fuzzy Logic PI Controller”. ARPN Journals Vol. 6, No. 9, September 20113.
Tan Chee Siong , Baharuddin Ismail, Siti Fatimah Siraj , Mohd Fayzul Mohammed “Fuzzy Logic Controller for BLDC Permanent Magnet Motor Drives” International Journal of Electrical & Computer SciencesIJECS-IJENS Vol : 11 No: 02,april 2011
4.
Mohammad-Reza MOSAVI, Abdoreza RAHMATI, Alireza KHOSHSAADAT ”Design of Efficient Adaptive Neuro-Fuzzy Controller Based on Supervisory Learning Capable for Speed and Torque Control of BLDC Motor” Iran University of Science and Technology,20125.
Mehmet Cunkas, Omer Aydogdu”Realization of Fuzzy Logic Controlled Brushless DC Motor drives using Matlab/Simulink” Mathematical and Computational Applications, Vol. 15, No. 2, pp. 218-229, 20106.
Rakesh Saxena , Yogesh Pahariya , Aditya Tiwary “Modeling and Simulation of BLDC Motor Using SoftComputing Techniques” 2010 Second International Conference on Communication Software and Networks.
7.
J.Sriram, K.Sureshkumar “Speed Control of BLDC Motor Using Fuzzy Logic Controller Based on Sensorless Technique” IEEE conference.8.
Mohammed Abdelbar Shamseldin, Adel A. EL-Samahy “Speed Control of BLDC Motor By Using PID Controland Self-tuning Fuzzy PID Controller” IEEE 2014.