Stress strain relation
Rajkala
Asst. Prof. Dr. B.R.A.G.C. Kaithal-136027
Abstract :-The theory of elasticity describes the mechanical behavior of elastic bodies under the action of applied loads. The main problem is to study the elastic response of a material subject to certain applied loads which deform it. Hooke’s established that within an elastic limit stresses and strains are linearly connected. This law forms the basis of classical linear infinitesimal theory of elasticity. Later, Cauchy and Green study the question further two different approaches.
Keywords:- Covariant, contravariant , mixed tensor, moments, acceleration, covariant differentiation, surface force vector.
Introduction:- Cauchy’s approach consist in taking stress as a function of strain. This approach is quite general and include the dissipation of energy through the both mechanical and non mechanical
phenomenon during the deformation process . The result derived from this theory agree with experiments quite well to the first approximation. But later on, some physical effects were pointed out by elastician which could not be explained by it at all. Seth and Signorini etc. studied such type of materials for which the strain was small but the rotation were large. This came into existence the non linear theory of elasticity.
Green, Rivlin and Shield formulated the general theory of small deformation superposed on large deformation . Green and Zerna gave asystematic development of the finite deformation theory. Tensor methods are used to study the kinematics of deformation and derivation of the fundamental equations of finite elasticity.
Stress , Equations of Equilibrium and Boundary condition :-
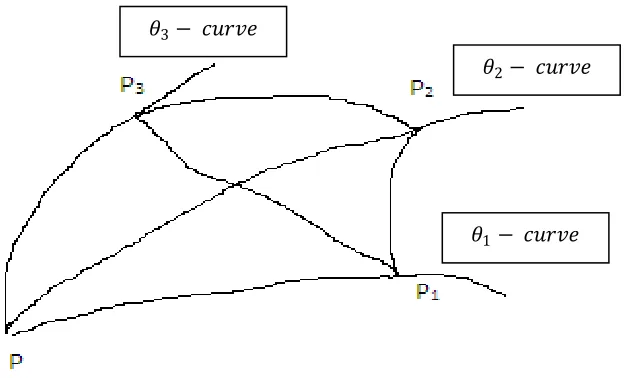
Let us form an infinitesimal tetrahedron at point P in the strained body B, whose edges are formed by the co-ordinate curves PPi (i=1,2,3) of length dsi
and the curves (shown in fig.) P
1P2 ,P2P3 ,P3P1 which inthe limit are defined by three vectors 𝑑𝑠𝑗
− 𝑑𝑠 = 𝐺𝑖 𝑑𝜃𝑗 𝑗 − 𝐺 𝑑𝜃𝑖 𝑖 (I,j not summed ,i≠ j) ………(1.1)
FIG. 1.1
Infintesimal curvilinear tetrahedron
The surface
𝜃
i = constant of the tetrahedron have areas ½ dsi and are represented vectorially by𝐺
𝑖
ds
i/ 2
√
G
ii……( 1.2)
The area of P1P2P3 is denoted by ½ ds and is given vectorially by 𝑛
𝑑𝑠
2 where 𝑛 is the unit normal to the
surface. Hence since the area P1P2P3 is vectorially equivalent to the surface
𝜃
i = constant of the tetrahedron, we haven ds =
G dsi iGii
3
i=1
…………..(1.3)
If the unit vector 𝑛 is resolved into its covariant components w.r.t. base vectors, then
𝑛 = 𝑛𝑖 𝐺 𝑖
Putting these values in (1.3), we get
𝑛
𝑖𝐺
𝑖
ds =
G dsi i√Gii
3
i=1
Or
√G
iids =
ds
i……(1.4)
Now, we consider the forces acting on the surfaces of the infinitesimal tetrahedron. We assume that the liming value of stress acting on any surface exists as the area of surface tends to zero.
𝜃3− 𝑐𝑢𝑟𝑣𝑒
𝜃2− 𝑐𝑢𝑟𝑣𝑒
Let the surface vector acting on ds be denoted by 𝑡 and those on dsi by – 𝑡 𝑖. Equation of motion of this
infinitesimal tetrahedron is
𝒕 ds = 𝒕 𝒊 dsi …….(1.5)
volume forces and mass acceleration acting on the tetrahedron do not appear in this equation since they are of high order of smallness than the surface forces. From (1.4) and (1.5)
𝑡
=
3𝑖=1𝑛
𝑖𝑡
𝑖
√𝐺
𝑖𝑖……..(1.6)
FIG. 1.2
Infintesimal curvilinear
parallelopiped
Also, since under general transformation of coordinate 𝑡 is invariant and ni is a covariant vector, it
follows from (1.6) that
t
√G
i iitransform according to a contravariant type of transformation.
Therefore from (1.6)
𝑡
√𝐺
𝑖 𝑖𝑖=
𝜏
𝑖𝑗𝐺
𝑗=
𝜏
𝑗𝑖𝐺
𝑗……..(1.7)
Where
τ
ij andτ
jiare associate contravariant and mixed tensor of second tensor which are called stress tensors.
−𝑇 𝑑𝜃1 2𝑑𝜃3
( 𝑇3 + 𝑇 3,3𝑑𝜃3)𝑑𝜃1𝑑𝜃2
−𝑇 𝑑𝜃2 1𝑑𝜃3
(𝑇 2 + 𝑇 2,2𝑑𝜃2)𝑑𝜃1𝑑𝜃3
(𝑇 1 + 𝑇 1,1𝑑𝜃1)𝑑𝜃2𝑑𝜃3
From (1.6) and (1.7) we get,
𝑡 = 𝜏𝑖𝑗 𝑛𝑖 𝐺𝑗 = 𝜏𝑗𝑖𝑛𝑖 𝐺 𝑗 ……….(1.8)
So that if 𝑡 = 𝑡𝑗 𝐺 𝑗 = 𝑡𝑗 𝐺 𝑗 ………(1.9)
Then 𝑡𝑗 = 𝜏𝑖𝑗 𝑛𝑖 and 𝑡𝑗 = 𝜏𝑗𝑖𝑛𝑖
…….(1.10)
and
t
j andt
j are the contravariant and covariant components respectively of the stress vector t.The three stress vector in (1.7) may be put in the form
t i = τ ijG
j √Gii 3
j=1
= 3𝑗 =1√𝐺𝑗𝑗𝜏𝑖𝑗𝐺 √𝐺𝑗 𝑖𝑖√𝐺𝑗𝑗
𝑡 𝑖 = 𝜎𝑖𝑗 𝐺𝑗 √𝐺𝑗𝑗 3
𝑗 =1
Where 𝜎𝑖𝑗 = √𝐺√𝐺𝑗𝑗𝑖𝑖 𝜏𝑖𝑗 (i,j=1,2,3)
…..(1.11)
And 𝐺 𝑗/ √𝐺𝑗𝑗 are unit vectors along coordinate curves. 𝜎𝑖𝑗 is the physical components of the stress
vector 𝑡 𝑖 in the direction of unit vector 𝐺 𝑗/ √𝐺𝑗𝑗 .
Now we consider an infinitesimal parallelopioed shown in figure whose faces have area dsi .
The forces on the faces 𝜃𝑖 = constant through P are, to the first order, −𝑡 𝑖 dsi (i not summed) and
therefore we may write as
−𝑇𝑖𝑑𝜃𝑗𝑑𝜃𝑘 (i≠ 𝑗 ≠ 𝑘)
Where 𝑇 𝑖 = √𝐺𝑖𝑖 𝑡𝑖 =√𝐺𝜏𝑖𝑗𝐺 𝑗 ….(1.12)
The forces on the faces 𝜃𝑖 = constant and on the faces 𝜃𝑖+ 𝑑𝜃𝑖 =constant are shown in the figure.
The body forces acting on the elementary parallelepiped whose volume d𝜏 is given by 𝜌 𝐹𝑑𝜏 or 𝜌 𝐻 𝑑𝜃1𝑑𝜃2𝑑𝜃3 , where 𝐻 = 𝐹 √𝐺 ……..(1.13)
Where 𝜌 is the density of the strained body B.
Now taking moments about the centre of gravity of the elementary volume, since in the limit, we may retain only first order terms, this gives
𝐺 × 𝑖 𝑇 𝑖 = 0
∴ 𝜖𝑖𝑗𝑘𝐺 𝑘 𝜏𝑖𝑗 = 0
Where 𝜖𝑖𝑗𝑘 = 𝜖𝑖𝑗𝑘 √𝑔 and 𝜖𝑖𝑗𝑘 is the alternate tensor.
Writing (1.14) in this way we obtained
(𝜏23 − 𝜏32)𝐺 1 + (𝜏31 − 𝜏13)𝐺 2 + (𝜏12 − 𝜏21)𝐺 3 =0
It follows from this equation that 𝜏𝑖𝑗 = 𝜏𝑗𝑖 ……..(1.15) So that stress vectors are symmetric.
Equation of motion states that the (vector) sum of all the forces acting on the elementary volume equals the mass acceleration of the volume, where the acceleration may be taken to be that of centre of gravity namely 𝑓 . Hence in the limit (from the above fig.)
𝑇 𝑖,𝑖 + 𝜌 𝐻 = 𝜌 ………(1.16)
= 𝑓 √𝐺 …………(1.17) When the body is in equilibrium
𝑓 =0 and 𝑇 𝑖,𝑖 + 𝜌 𝐻 = 0 ……..(1.18)
Equation of motion can be expressed in alternative forms, if
𝐹 = 𝐹𝑖𝐺 𝑖 =𝐹𝑖𝐺 𝑖
………….(1.19) 𝑓 = 𝑓𝑖𝐺 𝑖 =𝑓𝑖𝐺 𝑖
Then
𝐻 = 𝐻𝑖𝐺 𝑖 =𝐻𝑖𝐺 𝑖
………..(1.20) = 𝑖𝐺 𝑖 =𝑖𝐺 𝑖
Where 𝐻𝑖= 𝐹𝑖√𝐺 , 𝐻𝑖 = 𝐹𝑖√𝐺
……….(1.21) 𝑖= 𝑓𝑖√𝐺 , 𝑖 = 𝑓𝑖√𝐺
Also if 𝜑𝑖𝑗 = 𝜏𝑖𝑗 √𝐺 , 𝜑𝑗𝑖 = 𝜏𝑗𝑖√𝐺 ………..(1.22)
Then from (1.12) 𝑇 = 𝜑𝑖 𝑖𝑗𝐺 𝑗 =𝜑𝑗𝑖𝐺 𝑗 ………….(1.23)
Using (1.19) to (1.23) the equation of motion (1.16) becomes diff. partially (1.23) we have
𝑇𝑖,𝑖
=𝜑
,𝑖𝑖𝑗 + 𝜑𝐺𝑗 𝑖𝑗𝐺 𝑗 ,𝑖 Г
And using 𝐺 𝑗 ,𝑖 = Г𝑖𝑗𝑟 𝐺 𝑟
=> 𝜑,𝑖𝑖𝑗 + Г𝑖𝑟𝑗 +𝜌𝐻𝑗 = 𝜌𝑗 ……..(1.24)
Or 𝜑𝑗 ,𝑖𝑖 − Г𝑖𝑗𝑟 𝜑𝑟𝑖 +𝜌𝐻𝑗 = 𝜌𝑗 ………..(1.25)
Using (1.22) the above becomes
𝜏,𝑖𝑖𝑗 + Г𝑖𝑟𝑗 𝜏𝑖𝑟 + Г𝑖𝑟𝑟 𝜏𝑖𝑗 +𝜌𝐹𝑗 = 𝜌𝑓𝑗 ………..(1.26)
𝜏𝑗 ,𝑖𝑖 + Г𝑖𝑗𝑟 𝜏𝑖𝑟 + Г𝑖𝑟𝑟 𝜏𝑗𝑖 +𝜌𝐹𝑗= 𝜌𝑓𝑗 ………..(1.27)
Or can be written as 𝜏𝑖𝑗 ∥
𝑖 +𝜌𝐹𝑗 = 𝜌𝑓𝑗 ……….(1.28)
𝜏𝑗𝑖 ∥
𝑖 + 𝜌𝐹𝑗= 𝜌𝑓𝑗 ……….(1.29)
Where double line denotes covariant differentiation w.r.t. the strained body B.
The condition at the boundary surface of the body at which the surface forces are prescribed is that
𝑡
= 𝑃 − …………(1.30)
Where 𝑃 is the surface force vector. If we write 𝑃 in terms of component
𝑃 = 𝑃𝑗𝐺 𝑗 = 𝑃𝑗𝐺 𝑗
And using (1.10) 𝜏𝑖𝑗 𝑛
𝑖 =𝐺𝑗 𝑃𝑗 𝐺𝑗
𝜏𝑖𝑗 𝑛
𝑖 = 𝑃𝑗 ………..(1.31)
𝜏𝑗𝑖 𝑛𝑖 𝐺𝑗 = 𝑃𝑗𝐺 𝑗
𝜏𝑗𝑖 𝑛𝑖 = 𝑃𝑗 ………(1.32)
REFERENCES :-
1. Hooke, Robert (1678) De Potentia Restitutive , London 2. Cauchy,A.L. (1823) Bull.SOC. Philomath. 9. And oeuvres, 3. Rivlin, R.S. (1948) Phil. Trans. Roy. Soc.. A,
4. Green, A.E. , &
Shield, R.T. (1952) Proc. Roy. Soc. A 5. Green, A.E. and