International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 10, October 2015)
87
Web Controlled Surveillance Robot
Devjyoti Ghosh
1, Shaarang Sahanie
2, Shreyas Bhandari
3, Vedant Shirali
4, Mudit Kapoor
51, 2,3,4,5Computer Engineering Department, NMIMS’s MPSTME Mumbai, Maharashtra, India
Abstract— This paper portrays the undertaking that expects to outline a reconnaissance robot that is designed all around to enter profoundly risky zones without its surroundings being mindful of its vicinity (thus the reconnaissance robot) and convey data with respect to its surroundings to a remote server (that may likewise be controlling it) regarding feature feed. In what capacity can a robot transmit the feature feed? The robot will utilize a camcorder to catch its surroundings. Using the analogy of a human eye, it (sensor) is continually sending signs to the cerebrum with respect to what it sees. The mind thusly, makes a certain move in like manner utilizing our limbs (actuators). Likewise the camcorder mounted on the robot capacities as the eye and the server or the remote control controlling it works as its mind.
Keywords—Rashpberry Pi, SSH, Surveillance Robot, Web
I. INTRODUCTION
Reconnaissance is the observing of the conduct, exercises, or other evolving data, generally of individuals with the end goal of impacting, overseeing, coordinating, or securing them. This can incorporate perception from a separation by method for electronic gear, (for example, CCTV cams), or interference of electronically transmitted data, (for example, Internet movement or telephone calls); and it can incorporate basic, generally no- or low-innovation techniques, for example, human insight specialists and postal capture.
Observation shapes a critical piece of every one of our lives yet numerous people hazard their lives ordinary attempting to complete this doubtful errand. People are excessively clear and when gotten in real life, may be hurt by the item under reconnaissance. It is a ton less demanding to send a robot to complete this fragile errand.
For this application, the robot must have a little casing, be light weight and calm. Observation is a mystery movement and one can't make its vicinity self-evident.
II. ADVANTAGES
Our robot has been constructed utilizing Raspberry Pi – the most vitality productive framework available. We have utilized a Mastercard estimated case and kept the skeleton of the robot light are adaptable.
A battery pack controls the robot which keeps going up to 5 hours in the field. It has a 5 megapixel camera connected on its head, which continually streams feature videos. The feature feed gets sent to an Android gadget which replaces most remote controls as it gives more range.
III. FEATURES
Housed in the interiors of this robot is the Raspberry Pi which controls the functioning of this robot. The Raspberry Pi is a credit-card sized single-board PC developed in the UK by the Raspberry Pi Foundation with the plan of advancing the instructing of essential software engineering in schools.
The feature controller is equipped for standard present day TV resolutions, for example, HD and Full HD, and higher or lower screen resolutions and more established standard CRT TV resolutions; fit for the accompanying: 640×350 EGA; 640×480 VGA; 800×600 SVGA; 1024×768 XGA; 1280×720 720p HDTV; 1280×768 WXGA variation; 1280×800WXGA variation; 1280×1024 SXGA; 1366×768 WXGA variation; 1400×1050 SXGA+; 1600×1200 UXGA; 1680×1050 WXGA+; 1920×1080 1080p HDTV; 1920×1200 WUXGA. It can create 576i and 480i composite feature signals for PAL-BGHID, PAL-M, PAL-N, NTSC and NTSC-J.
Secure Shell, or SSH, is a cryptographic (encoded) system convention for launching content based shell sessions on remote machines in a protected manner. This permits a client to run summons on a machine's charge brief without them being physically present close to the machine. It likewise permits a client to build a safe channel over an unreliable system in a customer server structural engineering, associating a SSH customer application with a SSH server. Regular applications incorporate remote charge line login and remote order execution; however any system administration can be secured with SSH.
IV. METHODOLOGY
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 10, October 2015)
88
A. Camera Streamer
Here, we have created a method called CameraStreamer. This method is used to operate the camera. This method controls when the camera starts streaming, when it stops and also when a timeout occurs when no input is given in a fixed period of time. This method is present in camera_streamer.py file loaded in the raspberry pi.
Camera starts streaming: if input for camera start is received then a subprocess raspberry_pi_camera_streamer is started and a timer is started. Camera stops streaming:if
input for camera stop is received then
cameraStreamerProcess.terminate() is executed and timer is stopped Camera timeout. A timeout counter of 4 mins is set if timer that is started when the camera starts streaming exceeds the timer counter then stop streaming process is executed.
B. Robot Controller:
This method is used move the robot. It takes input from the joystick in the web page and in turns sends relevant input to the motor through the mini driver. It also is responsible for the camera tilt movement and resetting of the joystick back to the original position when the input is done.
C. Android Implementation:
Android development completely revolves around ―activities‖. And android program usually contains multiple activities and these are found to be related to each other in most of the cases. We usually create a new window to interact with the user.
We had to create a new android project selecting the minimum SDK version API 8 to support wider range of devices.
We need to add the following permission into our AndroidManifest.xml file to make our project support GCM.
INTERNET – to make your app use internet services ACCESS_NETWORK_STATE – To access network state (used to redirect internet status) GET_ACCOUNTS – Required as GCM needs google account WAKE_LOCK- Needed if your app need to wake your devices when it sleeps VIBRATE – Needed if your support vibration when receiving notification Also add some broadcast receivers as mentioned above.
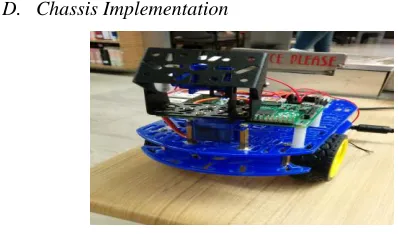
[image:2.612.323.522.135.252.2]D. Chassis Implementation
Figure I. Chassis Implementation
[image:2.612.322.548.166.692.2]E. Network Implementation
Figure II. Network Implementation
[image:2.612.332.552.301.473.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 10, October 2015)
[image:3.612.62.277.132.260.2]89
Figure IV. RJ45 Implementation
V. WHY RASPBERRY PI
Obsolete innovation used radio wires and motherboards to run robots. This was overwhelming, unreasonable and non-effective. The robot would wind up getting to be enormous and thick. The remote control and the radio wire was another pointless expansion. The robot would not work with a harmed radio wire and the costly plan would go to waste. Rather, we have made a little, light-weight robot that capacities without the need of a recieving wire. It is productive and does not oblige a warmth sink. It can be controlled through a cell phone.
Picking which board is obliged relies on upon the kind of venture that needs to be made, and the involvement in programming. On the off chance that one has no involvement in programming or gadgets, frameworks, for example, the Arduino have a more extreme expectation to absorb information than the Pi as one needs to learn them both in the meantime. The Arduino has been around for some time however and there are huge amounts of helpful excercises around to kick you off. Experienced software engineers (be it HTML, C/C++ or even BASIC), have no issue getting to holds with the Arduino straight away.
Then again, Arduino is in light of equipment, which implies the client won't get far without a few parts: LEDs, LCDs, resistors, engines and so forth, contingent upon what venture he needs to do. We require no experience or segments (other than a screen, console and mouse) to get the Raspberry Pi to do something. Raspberry Pi has less necessity, is savvy and bother free.
For an absolute equipment venture, Microcontrollers are by a wide margin the best decision. The simple inputs and PWM yields include an entire range of similarity the Pi can't do locally. In addition the vast about of I/O pins let you join various sensors and criticism segments. Microcontrollers are however not as effective as the Pi, so there's no legitimate sound, feature or web out-of-the-case (you can however include essential usefulness of this).
They can send information to your PC or Pi, over serial, and you can then make a system to peruse this information and do something.
For a product extend the Pi is the best approach. The sound, feature and web abilities make it the victor in this viewpoint. There's no compelling reason to append outside segments, so there's no genuine need to learn hardware.
VI. WHY SSH
SSH gives encryption to information exchange that anticipates would-be assailants from getting to your watchword and client data. Consequently, another playing point of SSH is that you can utilize it to passage different conventions. Case in point, in the event that you need to exchange documents safely, you can utilize SSH to encode your FTP exchanges. You can do this with pretty much any sort of association, for example, VNC or Samba.
With SSH you can deal with your devoted server remotely, screen logs, introduce applications, begin and stop administrations, and even control databases. It perceives ordinary Unix charges, and you can utilize it to login as root for full framework organization.
SSH is the most secure and dependable approach to deal with your server. With it you can do much more than you could with an electronic control board. Accordingly, while it is presumably not a trade for a graphical interface, it makes a brilliant and essential supplement.
VII. NETWORK IMPLEMENTATION
The Raspberry Pi cam module can be utilized to take superior quality feature, and in addition stills photos. It's anything but difficult to use for novices, yet has bounty to offer propelled clients in case you're looking to extend your insight. The module has a five megapixel settled centre cam that backings 1080p30, 720p60 and VGA90 feature modes, and also stills catch. It appends by means of a 15cm strip link to the CSI port on the Raspberry Pi. The cam lives up to expectations with all models of Raspberry Pi 1 and 2. It can be gotten to through the MMAL and V4L APIs, and there are various outsider libraries fabricated for it, including the Picamera Python library.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 10, October 2015)
90
You can simply connect it to PC's USB port and appreciate amazing rapid remote system access. This is without a doubt the trendiest bit of update you can make to your remote system.
EW-7811Un conforms to remote IEEE802.11b/g/n norms. As being assembled with the most recent remote innovation, the EW-7811Un can build your remote scope up to 3 times as much and extraordinarily help lessen "dead spots" contrasted with your old 11g connector. The transmission information rate can go up to 150Mbps when joined with a 802.11n gadget, with sign travel further and association a ton more steady contrasted with your past 802.11g system.
VIII. THE CHASSIS
A frame comprises of an inward structure that backings an artificial question in its development and utilization. We have utilized two body to show indoor and outside utilization. The two wheel undercarriage is littler and has a lighter casing. It is ideal for indoor observation as it has a versatile casing.
It comprises of two iron base sheets altered by metal poles lodging the battery pack, the servos and the engines. It has a third ball wheel which permits noiseless route.
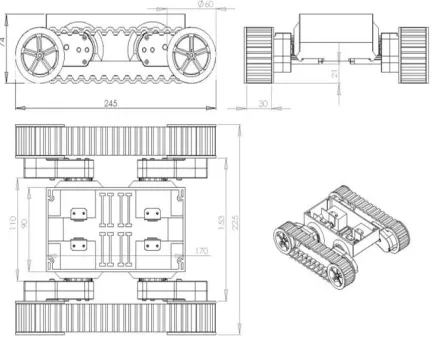
[image:4.612.334.552.353.542.2] [image:4.612.61.277.489.658.2]The second case is a tank meanderer. It is for mostly open air purposes. It has stretchable rubbers interfacing the wheels that issue it an off-road route capacity. The rubbers are non-slip so the robot doesn't have an issue on sodden surfaces. This undercarriage is a 4WD and must be coded contrastingly contrasted with the 2 wheel suspension.
Figure III. Chassis drawing Implementation
IX. RESULTS AND CONCLUSION
SSH Connectivity has been the exceptional offering purpose of this venture. It is the leap forward innovation used in this development that makes it not the same as all contending remote gadgets. Other remote gadgets work on a remote recurrence, Bluetooth or Wi-Fi. Nonetheless, by utilizing SSH, we can control the robot from over long separations the length of it has sufficient battery power.
A great thing about the Secure Shell (SSH), is the way
that, it fuses all the aforementioned attributes,
notwithstanding some interesting highlights of its own. Encryption and validation systems gave by SSH improves security to a more noteworthy degree, in light of the fact that generally the correspondence happens through a medium, which is unsecured (The Internet). This is majorly because of the way that ssh was made to supplant some frail remote login projects like rlogin, telnet and so forth
.
Figure III. Model Robot Implementation
X. FUTURE SCOPE
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 10, October 2015)
91
Online Map and voice recognition service can be implemented as well. Use of high quality batteries and other equipments will make the robot more effective and look more attractive.
Infrared illumination is in a frequency range beyond what the human eye is capable of registering as light. Conversely, most video cameras perceive infrared light just as they would any other type of light. So if the goal is to catch a bad guy in the act – and they usually strike in the darkness, then infrared is an invaluable tool to obtain irrefutable evidence of a suspect who believes he is not being watched. The day/night capability of IR cameras provide the best of both worlds, delivering vibrant color images during the day and high resolution b/w images at night.
REFERENCES
[1] Bandala, A.A.; Dadios, E.P. "Development and design of mobile robot with IP-based vision system", TENCON 2012 - 2012 IEEE Region 10 Conference, pp.1 - 6, 2012
[2] Chen-Yuan Chen, Bih-Yaw Shih, Chia-Hung Shih, Wei-Chung Chou ―RETRACTED: The development of autonomous low-cost biped mobile surveillance robot by intelligent bricks‖ Journal of Vibration and Control 2012
[3] Chen CY, Chen T-H, Chen Y-H, Yu S-E and Chung P-Y Information technology system modeling an integrated C-TAM-TPB model to the validation of ocean tidal analyses Journal of Vibration and Control 2013
[4] Chang R-F, Chen CY, Su F-P and Lin H-C A two-step approach for broadband digital signal processing technique Journal of Vibration and Control 2013
[5] Chen TH, Chang CJ, Yu SE, Chung PY and Liu C-K, Nonlinear information analysis and system management technique: the influence of design experience and control complexity Journal of Vibration and Control, 2013
[6] D. Hauml,hnel, W. Burgard, and G. Lakemeyer, "GOLEX - Bridging the gap between logic (GOLOG) and a real robot", Proc. 22nd German Conf. Artificial Intelligence (KI',98), pp.165 -176 1998
[7] Huosheng Hu, Lixiang Yu, Pui Wo Tsui, Quan Zhou ―Internet‐based robotic systems for teleoperation‖ Assembly Automation Vol. 21 Iss: 2, pp.143 – 152, 2001
[8] Khamis, A.; Rivero, D.M.; Rodriguez, F.; Salichs, M.A. "Pattern-based architecture for building mobile robotics remote laboratories", Robotics and Automation, Proceedings. ICRA '03. IEEE International Conference on, pp 3284 - 3289 vol.3 Volume: 3, pp. 14-19, 2003
[9] Kubota, N.; Toda, Y.; Beom Hee Lee "Multifeatured visualization and navigation in tele-operation of mobile robots", Robotic Intelligence In Informationally Structured Space (RiiSS),IEEE Workshop on, On page(s): 85 - 92, 2011
[10] Osentoski, Sarah; Pitzer, Benjamin; Crick, Christopher; Jay, Graylin; Dong, Shuonan; Grollman, Daniel; Suay, Halit Bener; Jenkins, Odest Chadwicke "Remote Robotic Laboratories for Learning from Demonstration", International Journal of Social Robotics, 2012 [11] Ruiz-del-Solar, J. "Personal Robots as
Ubiquitous-Multimedial-Mobile Web Interfaces", Web Conference,LA-WEB Latin American, pp. 120 - 127, 2007
[12] Sanzar Adnan Alam, Farhana Rashid, Md. Tanzilur Rahman, Saivi Islam, and Nusrat Jahan Lisa, ―Mobile robot controlled by voice command based on GCM technology using ANDROID device‖, 1st National Conference on Intelligent Computing and Information Technology, Chittagong, Bangladesh, pp. 96-101, 2013
[13] Soonshin Han; Jangmyung Lee "Tele-operation of a Mobile Robot Using a Force Reflection Joystick with a Single Hall Sensor", Robot and Human interactive Communication, The 16th IEEE International Symposium on, pp.206 - 211, 2007
[14] Schulz, D.Burgard, W.; Fox, D.; Thrun, S.; "Web interfaces for mobile robots in public places", Robotics & Automation Magazin, Volume:7 Issue:1, pp 48-56, 2002
[15] Tatiana Alexenko, Megan Biondo, Deya Banisakher, Marjorie Skubic. Android based Speech Processing for Eldercare Robotics in IUI’13 Companion, March 19 – 22, 2013.
[16] Theodoridis, T.; Huosheng Hu "Toward Intelligent Security Robots: A Survey", Systems, Man, and Cybernetics, Part C: Applications and Reviews, IEEE Transactions on, pp. 1219 - 1230 Volume: 42, Issue: 6,2012
[17] Vidoni, Renato; GarcÃ-a-Sánchez, Francisco; Gasparetto, Alessandro; MartÃ-nez-Béjar, Rodrigo "An intelligent framework to manage robotic autonomous agents", Expert Systems with Applications, Volume.38, Issue.6, pp.7430, 2011,
[18] Wonpil Yu; Jae-Yeong Lee; Heesung Chae; Kyuseo Han; Yucheol Lee; Minsu Jang "Robot task control utilizing human-in-the-loop perception", Robot and Human Interactive Communication, The 17th IEEE International Symposium on, pp. 395 - 400, 2008 [19] Yan Zhang; Bin Yu "Face recognition using combined non-negative
principal component analysis and linear discriminant analysis", Image and Signal Processing (CISP), 6th International Congress on, pp. 758 - 762 Volume: 2,2013
[20] https://code.google.com/p/usb-serial-for-android/