MULTI-OBJECTIVE PID CONTROLLER
BASED ON ADAPTIVE WEIGHTED
PSO
WITH APPLICATION TO STEAM
TEMPERATURE CONTROL IN
BOILERS
C.AGEES KUMAR1
1Department of Electronics& Instrumentation Engineering, Noorul Islam College of Engineering, Kumara coil,
TamilNadu,India (1[email protected])
N.KESAVAN NAIR2,
2Department of Electrical & Electronics Engineering, Noorul Islam College of Engineering, Kumara coil,
TamilNadu, India
Abstract- PID controller is widely used for main steam temperature control of boiler unit in thermal power plant. To avoid the drawback of current PID design methods, this paper presents a new design method for multi-objective PID controller to synthetically consider system requirement in reliability and robustness. Adaptive weighted PSO (AW-PSO) technique is applied to the parameter optimization design. The optimization problem considered is highly non-linear, complex, with multiple objectives and constraints. The simulation results on an actual main steam temperature control system indicate that, the multi-objective PID controller designed by presented method, can improve the dynamic performance of main steam temperature control system, with good robustness ability.
Keywords: boiler; main steam temperature control; multi-objective PID controller; AW-PSO algorithm; Pareto-optimal solutions
I. INTRODUCTION
Many real world control problems track several objectives simultaneously. The objectives under consideration conflict with each other and optimizing a particular solution with respect to single objective will result in unacceptable results with respect to other objective. The main steam temperature control system of boiler in large-scale thermal power plant is to improve the economic profit and to ensure the operation safety for thermal units [1].As the achievements of control theory and computer technology, the control strategy of main steam temperature system has been unceasingly developed[2-3]. But the most widely used, is still typical PID control systems, mainly due to its structure simplicity and universality.
To avoid the drawback of current PID design methods, this paper presents a new design method, In this study multi-objective particle swarm optimization (MOPSO) is used for tuning of non-linear PID controller parameters for steam temperature control of boiler unit in thermal power plant.. Unlike classical methods such as Ziegler-Nichols and Cohen-Coon and single objective optimization methods such as GA [6] and PSO [7], multi-objective optimization can minimize some important aspect of a system such as overshoot/undershoot and settling time simultaneously, so that various solutions with different overshoot/undershoot and settling time are obtained. The multi-objective PID controller designed by presented method, can improve the dynamic performance of main steam temperature control system, with good robustness ability.
II. MULTI-OBJECTIVE PID CONTROLLER IN MAIN STEAM TEMPERATURE CONTROL
Main steam temperature control system has to possess stronger restrain ability for inner-disturbance from spray-water d1 (t) and faster correction speed for outer-disturbance from the change rate of fuel d2 (t). For cascade PID
controller in main steam temperature control system, the main loop adopts PID controller, the by-loop, P controller, the block diagram shown in Figure 1.G1(s) and G2(s) are transfer functions for outer loop and inner loop
respectively. In order to simplify the realization complexity of the control system, sufficiently take the advantage of overcoming inner-disturbance from cascade control, so combine the by-loop of cascade control and inner loop into a generalized controlled object, refer the part in dotted line block in Figure 1.
Fig. 1 Structure of PID cascade control for main steam temperature system.
The dynamic characteristics of main steam temperature system are closely related to operating conditions of entire unit, when the load changes, the object feature of the units will cause significant change. The transfer function of main steam temperature due to spray-water disturbance under typical loads, for the over-heater of a 600MW once-through boiler with supercritical pressure is shown as Table 1,where D, the main steam flow.
Table I. Transfer Function of Main Steam Temperature Due To Spray-Water Disturbance under Typical Loads
Load G1(s) G2(s)
50%(D=242.2kg/s) 3.067/(1+25s)2 1.119/(1+42.1s)7
75%(D=347.9kg/s) 1.657/(1+20s)2 1.202/(1+27.1s)7
100%(D=527.8kg/s) 0.815/(1+18s)2 1.276/(1+18.4s)6
For cascade PID control of main steam temperature system, the controller parameters of PID main loop Kop, Toi,
Tod and the controller parameters of P by-loop control Kip are all edited by real number code. Using AW-PSO
algorithm for optimization search, the actual cascade PID parameter satisfied actual requirement can be obtained. For above system example, the search ranges of Kop, Toi and Tod are [0.001, 1.5] [0.001, 400] [0.001, 100] and [5,
30] respectively. Gmin and Pmin are 2 and 600.
III. THE MULTI-OBJECTIVE PID CONTROLLER BASED ON THE AW-PSO ALGORITHM
PID regulator makes proportional, integral and differential operation by means of feedback signals, and uses its weighted sum to form the control signal. Consider the structure of a typical PID controller:
)
1
1
(
(s)
G
PIDT
s
s
T
kp
di
(1)
+
+
e(t)
P G1(s) G2(s)
+
+
y (t)
PID r (t)
+
-
+
Where, kp, Ti and Td present proportional coefficient, integral time constant and differential time constant respectively.
The particle swarm optimization algorithm is a population based search algorithm based on the simulation of the social behavior of birds within a flock. In PSO, individuals referred to as particles, are flown through hyper dimensional search space. Changes to the position of particles within the search space are based on the social psychological tendency of individuals to emulate the success of other individuals. The changes to a particle within the swarm are therefore influenced by the experience, or knowledge, of its neighbors. The search behavior of a particle is thus affected by that of other particles within the swarm (PSO is therefore a kind of symbiotic cooperative algorithm). The consequence of modeling this social behavior is that the search process is such that particles stochastically return toward previously successful region in the search space [7].
A swarm consists of a set of particles, where each particle represents a potential solution. Particles are then flown through the hyperspace, where the position of each particle is changed according to its own experience and that of its neighbors. Let xi (t) denotes the position of particle P
i in hyperspace, at time step t. The position of Pi is then
changed by adding a velocity vi
i(t) to the current position as:
)
(
)
1
(
)
(
x
it
x
it
v
it
(2)
The velocity vector drives the optimization process and reflects the socially exchange information. Velocity update equation is as follows:
)) 1 ( ( )) 1 ( ( ) 1 ( ) (
vi t wvi t c1r1 Pbixi t c2r2 Pgxi t
(3)
where w is the inertia weight, c1 and c2 are positive constants and r1 and r2 are random numbers obtained from a
uniform random distribution function in the interval [0, 1]. The parameters Pbi and Pg represent the best previous
position of the i-th particle and position of the best particle among all particles in the population respectively [8]. The inertia weight controls the influence of previous velocities on the new velocity. Large inertia weights cause larger exploration of the search space while smaller inertia weights focus the search on a smaller region. Typically, PSO started with a large inertia weight, which is decreased over time. Shi and Eberhart proposed a ‘fuzzy adaptation’ of the inertia weight [8] due to the fact that a linearly-decreasing weight would not be adequate to improve the performance of the PSO due to its nonlinear nature. In this paper we use the following formula to change the inertia weight at each generation:
)
1
(
00
r
w
w
w
(4)
where w0 is the initial positive constant in the interval [0, 1] and r is random number obtained from a uniform
random distribution function in the interval [0, 1]. The suggest range for w0 is [0, 0.5], which make the weight w
randomly varying between w0 and 1.
To improve the performance of the PSO for multi-objective optimization problems, Mahfouf [11] proposed an Adaptive Weighted PSO (AWPSO) algorithm, in which the velocity in Eq. (3) is modified as follows:
(
(
1
))
(
(
1
))
)
1
(
)
(
v
it
w
v
it
c
1r
1P
bi
x
it
c
2r
2P
g
x
it
(5)
The second term in Eq. (9) can be viewed as an acceleration term which depends on distances between the current position xi (t) , the personal best P
N and the global best Pg
The acceleration factor α is defined as follows:
T
t
0
(6)
where t is current generation, T denotes the number of generations and the suggest range for
0is [0.5,1].As can be seen from Equation (5), the acceleration term will increase as the number of iterations increases, which will enhance the global search ability at the end of run and help the algorithm to jump out of the local optimum, especially in the case of multi-modal problems.
)
(
)
(
k
w
f
k
Eval
i iwhere
w
i
1
(7)
where n is the number of objective functions and k denotes the k-th particle and the weights wifor each objective are
changedand normalized as follows:
ni j
i i
w
1
;
i,
j
U
(
0
,
1
)
(8)where μi and μj are random numbers obtained from uniform random distribution function in the interval [0,1] IV.
RESULTS OF TUNING AND ITS COMPARISON
Using AW-PSO algorithm for optimization of PID parameters of main steam temperature control system above mentioned, set the parameters of the controller parameters to be tuning at 75% load. For AW-PSO, actual running time reaches to 30, Pareto optimal solution has basically unchanged, with rapid convergence.
Pareto solution set obtained from the AW-PSO algorithm in Figure 2 can satisfy the requirements of stability and robustness for different preferences. When the system needs low overshoot, can choose sample 3, or needs overshoot, solution 1 will be fine.. Therefore it provides an effective tool for trade-off analysis for speediness, stability and robustness and overcome the blindness in weight setting effectively.
Fig.2 Pareto Optimal front
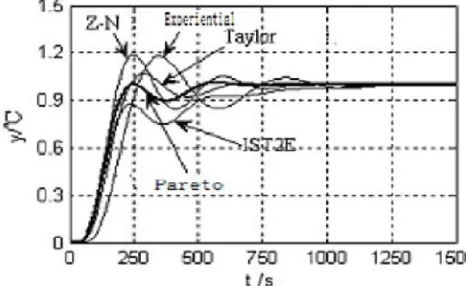
The step response curves with different PID controllers shown as Fig. 3.
It shows that the unbiased optimal solution from presented method is prior to the others.(y as output)
Fig. 3 Step response with different PID controllers.
Consider the unbiased optimal solution in 75% full load for analyzing the anti-disturbance ability of the multi-objective PID controller, add a step disturbance with d1 = 1 for spray-water in the by-loop and with d2 = 0.3 for the
separately. And the disturbance is added on t = 800s during the stability condition of the system. The output response, given in Figure 4, shows that the control system behaves stronger anti-disturbance ability.
Fig. 4 Control system behaves as having stronger anti-disturbance ability.
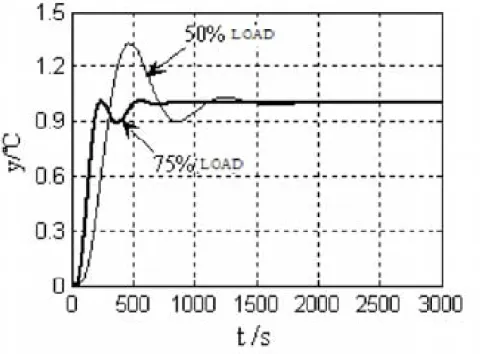
The dynamic characteristics of main steam temperature vary with the change of load and operating conditions. So the controller designed must have strong robustness. Consider the unbiased optimal solution in 75% full load for analyzing the robustness of the multi-objective PID controller. Using the parameters above, the step response in 50% of full load can be obtained (Fig.5). The simulation shows that the control system still keeps good dynamic performance, good control quality and stronger robustness in the condition of different load of main steam system.
Fig. 5 Control system behaves as having robustness ability.
V.CONCLUSION
REFERENCES
[1] [HOU Shu-wen, DUAN Ai-xia, et all. Bandwidth analysis of main-steam temperature PID controller parameters in fossil-fired power station [J]. Electric Power Automation Equipment, 2005, 25(5): 77-81.
[2] QI Chang, CHEN Yue-hua, et all. Application of fuzzy self-adapted predictive control to main steam temperature control in power plant[J]. Electric Power Automation Equipment, 2005, 25(5): 15-19.
[3] WANG Guo-yu1, MEI Hua2, et all. Fuzzy Adaptive Predictive Functional Control In Main Steam Temperature System [J]. Proceedings of the CSEE, 2003, 23(10): 230-235.
[4] ZIEGLERJ G, NICHOLS N B. Optimum settings for automatic controllers [J]. Trans on American Society of Mechanical Engineering, 1942, 62(8): 759 – 768.
[5] M Zhuan, D P Atherton. Automatic tuning of optimum PID controllers. Proc. Inst. Elec. Eng. Pt. D, 1993, 140(3): 216-224. [6] Goldberg, D. E., Genetic Algorithms in Search, Optimization, and Machine Learning, Reading MA: Addison-Wesley, 1989. [7] J. Kennedy and R. Eberhart, Particle Swarm Optimization, Neural Networks, Perth; Australia, pp. 1942-1948, 1995.
[8] Y. Shi and R. Eberhart, Fuzzy Adaptive Particle Swarm Optimization, Congress on Evolutionary Computation, Seoul, Korea, pp. 101-106, 2001.
[9] Mahfouf, M., Minyou-Chen, D. A. Linkens (2004). Adaptive Weighted Particle Swarm Optimization (AWPSO) of Mechanical Properties of Alloy Steels. 8th International Conference on Parallel Problem Solving from Nature (PPSN VIII), Birmingham (U.K).