67 All Rights Reserved © 2012 IJARCSEE
RADAR CROSS SECTION PREDICTION FOR DIFFERENT
OBJECTS USING MAT LAB AND RADAR CROSS SECTION
(RCS) REDUCTION
R.Radha Krishna, Assoc.Prof, R.Murali Krishna, R.Gopi Krishna, D.Sekhar
_____________________________________________________________________ ABSTRACT----Radar Cross Section (RCS) depends on the characteristic dimensions of the object compared to the radar wave length. The Radar Cross Section of the target determines the power density returned to the radar for a particular power density incident on the target. The cross section is more dependent on the target shape than its physical size. The radar antenna captures a portion of echo energy incident on it. Radar Cross Section fluctuates as a function of radar aspect angle and frequency.
Using the MAT LAB Programming, Prediction of Radar cross section `σ` for simple shapes of targets like Sphere, Ellipsoid and Circular Flat Plate. The methods of controlling radar cross section and penalties of implementing these methods are discussed. The four basic techniques for reducing radar cross section (target shaping, radar absorbing materials, passive cancellation, and active cancellation) are summarized with their advantages and disadvantages.
Keywords: Active cancellation, Echo energy, Passive cancellation, Radar Cross Section
1. INTRODUCTION
In this Paper, the phenomenon of target scattering and methods of RCS calculation are examined. Target RCS fluctuations due to aspect angle, frequency, and polarization are presented. Target scattering matrix is developed. Radar cross section characteristics of some simple and complex targets are also introduced.
2. RADAR FUNDAMENTALS
RADAR is a contraction of the words RAdio Detection And Ranging.
RADAR is an Electromagnetic system for the detection and location of objects. Radar operates by transmitting a particular type of waveform and detecting the nature of the signals reflected back from objects
The Radar Range Equation- The radar range equation relates the range of the radar to the characteristics of the transmitter, receiver, antenna, target and the environment.
Manuscript received June 15, 2012.
Radha Krishna Rapaka, Assoc.Prof. in ECE Department,Swarnandhra College of Engineering &Technology., (e-mail: [email protected]). Narsapur,India, 9490346661.
Murali Krishna Rapaka, ECE Department,SCET (e-mail: [email protected]).Narsapur,India, 8790837227.
Gopi Krishna Rapaka, ECE Department, JITS(e-mail: [email protected]).Narsapur,India, 9963438298.
D.Sekhar,ECE Department, SCET(e-mail: [email protected]).Narsapur,India, 9491018701.
3. RADAR CROSS SECTION (RCS)
3.1. Introduction
The term Radar cross section (RCS) is a measure of power scattered in a given direction when a target is illuminated by an incident wave from Radar More precisely it is the limit of that ratio as the distance from scatterer to point where the scattered power is measured approaches infinity.
2 lim
inc scat
E E
R
2 2
2 2
2 2
4 4
scat scat
inc inc
E H
R R
E H
Where σ is Radar Cross Section in sq. meters
E scatis scattered electric field
E inc is field incident at the target
R is the distance to the target from the Radar
Antenna.
-EM scattered field: is the difference between the
total field in the presence of an object and the field
that would exist if the object were absent.
- EM diffracted field: is the total field in the
presence of the object.
-when 2 . 1
a(the Rayleigh region), the
scattering from a sphere can be used for modeling
68 All Rights Reserved © 2012 IJARCSEE
Fig:3.1(a) Radar cross section of the sphere a= radius, λ = wavelength
-when 2 . 1
a the σ approaches the optical
cross section πa2
. RCS can be expressed as
Because in the far field either E or H is sufficient to describe the EM wave.
Radar Cross Section is a function of
Position of transmitter relative to target
Position of receiver relative to target
Target geometry and material composition
Angular orientation of target relative to transmitter and receiver
Frequency or wavelength
Transmitter polarization
Receiver polarization.
Having gone through the introductory part of Radar
Cross Section, let us, now discuss the importance
of Radar Cross Section for Naval Targets.
3.2. Importance of Radar Cross-Section Prediction for Naval Targets
There are five basic reasons for why the RCS measurements are conducted. They give brief knowledge of the following. They are
Acquire understanding of basic scattering phenomena
Acquire diagnostic data
Verify the system performance
Build a database
Satisfy a contractual requirement.
Due to the above reasons Radar Cross Section
measurement has gained a lot of importance.
3.3. Methods of RCS prediction
Two categories of RCS prediction methods are
available: exact and approximate.
Exact methods of RCS prediction are very complex even for simple shape objects associated with the exact RCS prediction, approximate methods become the viable alternative. The majority of the approximate methods are valid in the optical region, approximate methods are Geometrical Optics (GO), Physical Optics (PO),
Geometrical Theory of Diffraction (GTD), Physical Theory of Diffraction (PTD), and Method of Equivalent Currents (MEC). Interested readers may consult Knott or Ruck (see References) for more details on these and other approximate methods.
3.4. RCS Dependency on Aspect Angle and Frequency
Radar cross section fluctuates as a function of radar aspect angle and frequency. The spacing between the two scatterers is 1 meter. The radar aspect angle is then changed from zero to 180 degrees, and the composite RCS of the two scatterers measured by the radar is computed.
Figure: 3.1(b) RCS dependency on aspect angle. (a) Zero aspect angle, zero electrical spacing.
(b) Aspect angle, electrical spacing.
Fig. 3.2 shows the composite RCS
corresponding to this experiment. This plot can be
reproduced using MATLAB function “rcs_aspect.m”. As indicated by Fig. 3.1(b), RCS
is dependent on the radar aspect angle
Figure: 3.2. Illustration of RCS dependency on aspect angle.
MATLAB Function “rcs_aspect.m”
69 All Rights Reserved © 2012 IJARCSEE
Next, to demonstrate RCS dependency on
frequency, consider the experiment shown in Fig:
3.3. Fig: 3.4 and Fig: 3.5 show the composite RCS
versus frequency for scatterer spacing of 0.1 and
0.7 meters.
Figure: 3.3. Experiment setup which demonstrates RCS dependency on frequency; dist = 0.1, or 0.7 m.
Figure: 3.4. Illustration of RCS dependency on frequency.
Figure: 3.5. Illustration of RCS dependency on frequency.
From those two figures, RCS fluctuation as a function of frequency is evident. Little frequency change can cause serious RCS fluctuation when the scatterer spacing is large.
MATLAB Function “rcs_frequency.m” [rcs] = rcs_frequency (scat_spacing, frequ, freql)
RCS Dependency on Polarization
The material in this section covers two topics. First, a review of polarization fundamentals is presented. Second, the concept of target scattering matrix is introduced.
4. RCS OF SIMPLE OBJECTS 4.1. Introduction
This section presents examples of backscattered radar cross section for a number of simple shape objects. When compared to the optical region approximation, is overwhelming. Most formulas presented are Physical Optics (PO) approximation for the backscattered RCS measured by a far field radar in the direction (θ,φ) as illustrated in Fig.4.1.
Figure: 4.1. Direction of antenna receiving backscattered waves.
4.2. Sphere
The PP backscattered waves from a sphere are LCP, while the OP backscattered waves are negligible. The normalized exact backscattered RCS for a perfectly conducting sphere is a Mie series given by
Where r is the radius of the sphere, k = 2π/λ. λ is
the wavelength Jn, is the spherical Bessel of the
first kind of order n, Hn(1)and is the Hankel function
of order n, and is given by
In Fig. 3.9, three regions are identified. First is
the optical region (corresponds to a large sphere).
70 All Rights Reserved © 2012 IJARCSEE
Second is the Rayleigh region (small sphere). In
this case,
The region between the optical and Rayleigh
regions is oscillatory in nature and is called the Mie
or resonance region.
Figure : 4.2(a) Normalized backscattered RCS for a perfectly conducting sphere.
Figure: 4.2(b) Normalized backscattered RCS for a perfectly conducting sphere using semi-log scale.
The backscattered RCS for a perfectly conducting sphere is constant in the optical region. For this reason, radar designers typically use spheres of known cross sections to experimentally. 4.3 Ellipsoid
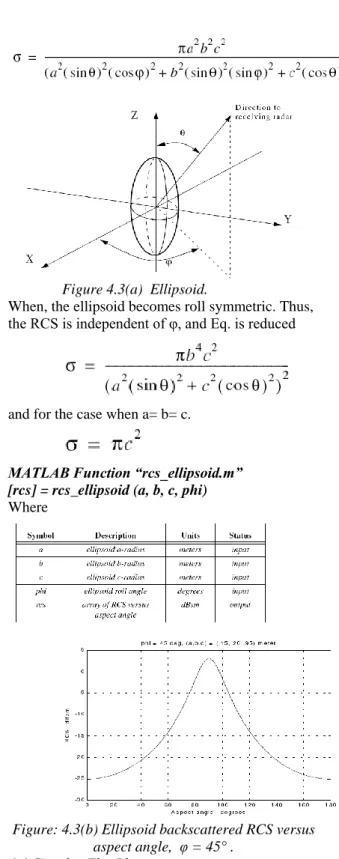
An ellipsoid centered at (0, 0, 0) is shown in Fig. 4.3. It is defined by the following equation:
One widely accepted approximation for the ellipsoid backscattered RCS is given by
Figure 4.3(a) Ellipsoid.
When, the ellipsoid becomes roll symmetric. Thus, the RCS is independent of φ, and Eq. is reduced
and for the case when a= b= c.
MATLAB Function “rcs_ellipsoid.m” [rcs] = rcs_ellipsoid (a, b, c, phi) Where
Figure: 4.3(b) Ellipsoid backscattered RCS versus aspect angle, φ = 45° .
4.4 Circular Flat Plate
Fig. 4.4(a) shows a circular flat plate of radius, centered at the origin. Due to the circular symmetry, the backscattered RCS of a circular flat plate has no dependency on φ. The RCS is only aspect angle dependent. For normal incidence (i.e., zero aspect angles) the backscattered RCS for a circular flat plate is
71 All Rights Reserved © 2012 IJARCSEE
Figure: 4.4(a) Circular flat plate.
For non-normal incidence, two approximations for the circular flat plate backscattered RCS for any linearly polarized incident waves are
---4.36
--4.37 Where k =2π/λ/, and J1(β) is the first order
spherical Bessel function evaluated at β . The RCS corresponding to Eqs. 4.37through4.35 is shown in Fig.4.4 (b) These plots can be reproduced using MATLAB function “rcs_circ_plate.m” .
MATLAB Function “rcs_circ_plate.m”
[rcs] = rcs_circ_plate (r, freq)
Figure: 4.4(b) Backscattered RCS for a circular flat plate.
5. RADAR CROSS SECTION REDUCTION (RCSR) TECHNIQUES
5.1 Introduction
For military RCS reduction is necessary because of the following reasons:
To make ships / objects less detectable by the enemy radar
To increase the effectiveness of Chaff (Counter Measure)
To make classification of Targets difficult to the Radar
This chapter evaluates methods of controlling RCS and the penalties in implementing these methods. There are four basic techniques for reducing radar cross section: (1) target shaping, (2) radar absorbing materials, (3) passive cancellation, and (4) active cancellation.
Reduction methods are generally limited to a small spatial region. The platform design process must address how much RCS reduction is required based on the platform’s mission, and the additional cost of manufacturing and maintenance.
5.2 The Four Basic Techniques of RCSR
The following sections provide a summary of each RCSR technique.
5.2.1. Shaping
Traditionally, shaping is considered the first step of RCS control. The Lockheed F-117A (Figure 5.1) is an example of heavily applied surface faceting. Edges are parallel so that the majority of the edge effects are collectively directed away from important viewing angles. The Northrop B-2 also uses some faceting, especially on the trailing edges of the wing. In planform (Figure 5.2), the straight edges are dominant.
For more “boxy” structures such as ships and ground vehicles, dihedral and trihedral corners, and “top hats” (right circular cylinders with axes perpendicular to a flat plane) are the major RCS contributors. The amount of bulkhead tilt is a trade-off between RCSR performance and cost.
72 All Rights Reserved © 2012 IJARCSEE
Figure: 5.2: The B-2 Spirit was one of the first aircraft to successfully become 'invisible' to radar.
Figure: 5.3. Planform of the Northrop B-2 .
5.2.2. Radar Absorbing Materials
The radar absorbing materials reduce the energy reflected back to the radar by means of absorption. Radar energy is absorbed through one or more of several mechanisms, which may involve the dielectric or magnetic properties of the materials. In summary, the requirements of a RAM for use in RCS reduction are: (1) the absorbing material should have adequate frequency response, (2) it should work for two orthogonal polarizations, and (3) it should work with the specified aspect angle characteristics [4]. To choose a RAM that simultaneously satisfies all of these requirements, and yet is physically realizable is difficult, if not impossible. Considerations of weight and environment (e.g., temperature, rain, snow, etc.) play an important role in deciding the thickness of any RAM coating.
5.2.3. Passive Cancellation
Passive cancellation refers to RCS reduction by introducing a secondary scatterer to cancel with the reflection of the primary target. This method is also known as impedance loading.
The basic concept is to introduce an echo source whose amplitude and phase can be adjusted to cancel another echo source. This can be accomplished for relatively simple objects, provided that a loading point can be identified on the body.
In addition to this, typical weapons platforms are hundreds of wavelengths in size and have dozens, if not hundreds of echo sources. Clearly, it
is not practical to devise a passive cancellation treatment for each of these sources. Note that there is a gray area between the technologies of absorbing materials and passive cancellation. For example, a layer of lossy dielectric coating applied to a target could fall into either category.
5.2.4. Active Cancellation
Active cancellation involves the process of modifying and retransmitting the received radar signal. Obviously, this requires a challenging task for the system, as the frequency increases the work becomes much more difficult
There are two levels of cancellation:
1.Fully active: The cancellation network receives, amplifies, and retransmits the threat signal such that it is out of phase with the static RCS of the target. The transmitted signal amplitude, phase, frequency and polarization can be adjusted to compensate for changing threat parameters. 2. Semiactive: No boost in threat signal energy is provided by the cancellation network, but passive adjustable devices in the network allow the reradiated signal to compensate for limited changes in the threat signal parameters.
The demands for a fully active system are almost always so severe as to make it impractical. It requires a transmitter and antennas that cover the anticipated threat angles, frequencies, incident power densities, and polarization. Knowledge of the threat direction is required, as well as the target’s own RCS. A semiactive system is not as complicated in terms of hardware, but the use of adjustable devices still requires bias lines, controller units, and a computer with the appropriate data bases.
6. THE PENALTIES OF RCSR
The first and unavoidable penalty of RCSR is the additional cost. The others are: reduced payload, added weight, required high maintenance, and reduced range or other operational limitations. The mission of the platform and the severity of the threat environment will determine the required RCSR and drive the trade-off study.
RCSR is just one aspect of the entire platform design which is affected by other sensors and signatures (infrared, acoustic, visual, etc.). An optimum design must be devised in order to maximize the objectives of the platform.
In this paper the four basic RCSR techniques were presented. Of the four, the use of shaping and radar absorbing material design are the most used to date.
7. RESULTS
MAT LAB Simulated Results
73 All Rights Reserved © 2012 IJARCSEE
Frequency is 3GHz ; Scatter spacing is 0.5 m
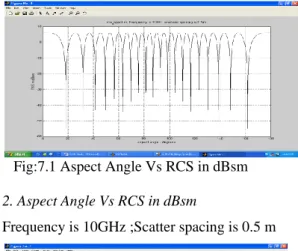
Fig:7.1 Aspect Angle Vs RCS in dBsm
2. Aspect Angle Vs RCS in dBsm
Frequency is 10GHz ;Scatter spacing is 0.5 m
Fig:7.2 Aspect Angle Vs RCS in dBsm
3. Aspect Angle Vs RCS in dBsm
Frequency is 10GHz ;Scatter spacing is 1.0 m
Fig:7.3 Aspect Angle Vs RCS in dBsm
4. Frequency Vs RCS in dBsm
Frequency is 1GHz; Scatter spacing is 0.1 m
Fig:7.4 Frequency Vs RCS in dBsm
5. Frequency Vs RCS in dBsm
Frequency is 1GHz; Scatter spacing is 1.0 m
Fig:7.5 Frequency Vs RCS in dBsm
6. Sphere: Sphere circumference Vs RCS
Fig: 7.6(a) Sphere circumference Vs RCS
Fig: 7.6(b) Sphere circumference Vs RCS
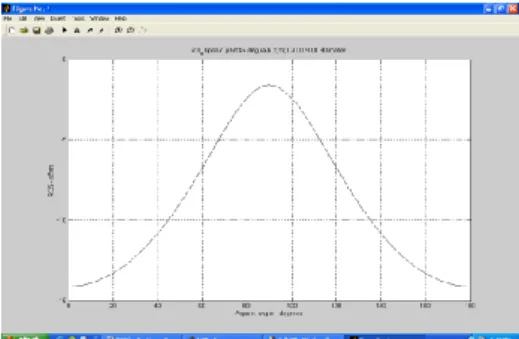
7. Ellipsoid: RCS versus aspect angle.
a =0 .15; b =0.20; c=0.95
Fig: 7.6(c) RCS and aspect angle
8. Ellipsoid: RCS versus aspect angle.
74 All Rights Reserved © 2012 IJARCSEE
Fig: 7.8 RCS and aspect angle
9. Circular flat plate
RCS of a circular flat plate of radius’ r’
Frequency in X-Band=12GHz;Radius(r ) = 0.5 m
Fig:7.9 RCS and aspect angle
10. Circular flat plate
RCS of a circular flat plate of radius’ r’
Frequency = X-Band=12GHz ;Radius(r ) = 0.25 m
Fig: 7.10 RCS and aspect angle
11. Truncated Cone (Frustum)
r1= 2; r2= 4; h= 8; freq= 9.5GHz ; indicator = 0
Fig: 7.11 RCS and aspect angle
8. CONCLUSIONS
Using the MAT LAB Programming, Prediction of Radar cross section of some simple shapes of
targets like Sphere, Ellipsoid, Circular Flat Plate are obtained.
The RCS variation as a function of frequency is obtained for two scatters and are presented in Figures when the scattering spacing is more, RCS is highly oscillatory. While RCS is less oscillatory for lower scattering spacing.
The RCS fluctuates as a function of frequency is evident. The importance of radar cross section reduction was discussed, and the major RCSR techniques summarized.
.
REFERENCES
[1] G.T. Ruck, D.E.Barrick, W.D.Stuart and C.K.Krichbaum” Introduction to Radar Cross-Section Measurements”, Proc.IEEE, vol.53. [2] H. Ling, R. Chou, and S.W. Lee, “Shooting and Bouncing Rays: Calculating the RCS of an arbitrarily shaped cavity,” IEEE Trans. Antennas Propagation, vol.37, pp.194-205, Feb. 1989. [3] Hans C.Strifrs and Guillermo C.Gaunaurd,”Scattering of Electromagnetic Pulses by Simple-Shaped Targets with Radar Cross Section Modified by a Dielectric Coating”,IEEE
Tansactions on Antennas and
Propagation,Vol.46,No.9.
[4] Lorant A.Muth, “Calibration Standards and Uncertainties in Radar Cross Section Measurements”, National Institute of Standards and Technology, Boulder,CO80303.
[5]E.F. Knott,”A progression of high-frequency RCS prediction
techniques,”Proc.IEEE,vol.73,pp.252-264,Feb. 1985.
[6] R.A. Ross,”Radar cross section of rectangular flat plates as a function of aspect angle,” IEEE trans. Antennas Propagation.,vol.Ap-14,pp.329-335, May 1996.
[7] V. H. Weston, “Theory of Absorbers in Scattering,” IEEE Transactions on Antennas and Propagation, Vol. AP, No. 4, September 1963. [11] J.Rheinstein, “Scattering of Electromagnetic waves from dielectric coated conducting spheres”, IEEE Trans.Antennas Propagation.,vol.12,
pp.334-340, May1964. [12] Prof. G.S.N.Raju,” Radar Engineering and
Fundamentals of Navigational Aids”, I.K.International Publications, New Delhi, 2008. [13] Radar Systems Analysis and Design Using MATLAB, Bassem R. Mahafza
[14] MATLAB Simulations for Radar Systems Design by Bassem R. Mahafza and Atef Z. Elsherbeni
[15] Eugene F. Knott, John F. Shaeffer, Michael T. Tuley, Radar crossection (2nd Edition), Artech House , London, 1992.
75 All Rights Reserved © 2012 IJARCSEE
[17] Ruck,G.T.,Barrick,D.E.Stuart,W.D., and Krichbaum,C.K.”Radar Cross Section Hand Book”,Volume 2.
[18] “Federation of American Scientist Official Website “(www.fas.org), 22 June 2003.
[19] Asoke Bhattacharyya, D.L. Sengupta, “Radar Cross Section Analysis & Control”, Artech House, 1991.
[20] B. C. Hoskin, A. A. Baker, “Composite Materials for Aircraft Structures”, AIAA, 1986. [21] David C. Jenn, “Radar and Laser Cross Section Engineering”, AIAA, 1995.
BIOGRAPHIES
R.Radha Krishnareceived the B.E. and
M.Tech. degrees in electronics and Communication engineering from
Andhra University, India, in 2003 and
2009 respectively. In 2004, he joined Swarnandhra College of Engineering and Technology as a faculty in Department of Electronics and communication Engineering, AP, India. His research interests
include antennas, radar, optical communication and electromagnetics. He has published 3 research papers in
conferences. He is a Associate member of Institution of Electronics and Telecommunication Engineers (IETE) He is a GATE-2007 qualified and UGC NET-Dec.2011 qualified.
R.Murali Krishnareceived the B.Tech.
and M.Tech. degrees in electronics and Communication engineering from JNT University, India , in 2007and 2011 respectively. In 2007, he joined Swarnandhra College of Engineering and Technology as a faculty in Department of Electronics and communication Engineering, AP, India. His research interests
include Electronic Devices, radar, VLSI design. He has published 1 research papers in conferences. He is a Associate member of Institution of Electronics and Telecommunication Engineers (IETE).
R.Gopi Krishna received the B.E. in electronics and Communication engineering from Andhra University, India , in 2009.He joined JITS Engineering college as a faculty in Department of Electronics and communication Engineering, AP, India In 2009. Now he is pursuing M.Tech (Embedded systems) at B.V.C Engineering College, From JNT University, AP, India.His research interests include radar, Microprocessors and Embedded systems.
.D.Sekhar received the B.E. and
M.Tech. degrees in electronics and Communication engineering from
Andhra Universit and JNT University,
India , in 2000 and 2010respectively. In 2007, he joined Swarnandhra College of Engineering and Technology as a faculty in Department of Electronics and communication Engineering, AP, India. His research interests include antennas, radar, optical communication and electromagnetics. He is a Associate member of Institution of Electronics and Telecommunication Engineers (IETE).
or’s
Photo
or’s
Photo
or’s
Photo
or’s