ABSTRACT
HAZRA, SAMIR. Power Generation and Energy Storage Integration for Wave Energy Conversion System. (Under the direction of Dr. Subhashish Bhattacharya.)
In this thesis, modeling and emulation of wave energy converter (WEC) system,
dif-ferent power conversion architectures for generating oscillatory power from the WEC and
integration of energy storage systems to smooth the oscillatory power are investigated.
In laboratory experimental set-up, in place of an actual WEC, an emulated WEC
system is developed by realizing the torque-speed characteristics of the actual WEC
through the control of an electric motor. Expressions of the torque components applied
on the WEC by the oscillating wave are derived and the dynamic model of the entire
system including the WEC and the generator is developed. In emulated system, the dynamic model is solved on a digital signal processor (DSP) to generate the appropriate
torque reference for the motor to drive the generator. Torque-speed characteristics of the
developed emulation system is investigated by varying load on the generator.
Application of the doubly-fed induction generator (DFIG), which is widely used for
wind energy conversion system, is investigated by introducing a power topology, in which
the stator of the DFIG is connected to the grid through a phase sequence switching
circuit. In the proposed topology, due to bidirectional rotation of the WEC, the DFIG
works with +60 Hz, 0 Hz and−60 Hz frequency when the stator is connected to the grid in positive phase sequence, shorted and connected in negative phase sequence respectively. An optimal control scheme is developed to damp the stator flux transients with minimum
current injection from the rotor side, during the changes of the stator connection.
Another power architecture enabled by an active filter for generating oscillatory power
is also investigated. The proposed architecture uses a partially-rated power converter to
generate power. The power architecture can be applied to generate power either with a
squirrel-cage induction generation (SCIG) or a permanent magnet synchronous generator
(PMSG). In this power topology, the active power is generated through a diode
recti-fier and a boost converter combination. The harmonic current generated due to diode
rectification is compensated by the active filter. It is validated that the lower switching frequency of the active filter is adequate to compensate for the harmonic currents. A grid
connected power conversion system with the active filter enabled power architecture is
from the WEC.
A low speed direct-drive pole-modulated permanent magnet synchronous generator
(PM-PMSG), designed by ABB USCRC, is characterized for generating oscillatory power.
The power electronic conversion system and the control algorithm are developed to
con-trol the power from the generator and to integrate an energy storage in the system to
supply smooth power in stand-alone system.
Different energy storage systems such as super-capacitor (SESS) and battery energy
storage systems (BESS) to dispatch smooth power to the grid by absorbing the
oscilla-tory part of the power, are investigated. A systematic analysis of the need of a hybrid energy storage system (HESS), comprising of a high power specific energy storage
sys-tem like SESS and high energy specific energy storage syssys-tem like BESS, is elaborated.
Cost-effectiveness of the HESS in comparison with the independent SESS and BESS
is discussed. A prototype HESS is developed and integrated with the oscillatory wave
energy generation system connected to the grid.
High bandwidth control is required for the grid side converter (GSC) to integrate the
wave energy conversion system to the grid with higher stiffness of integration. In result,
GSC needs to be switched at high switching frequency. Also, the high efficiency of the
dc-dc boost converter is required for the energy storage system integration. To design, high
©Copyright 2017 by Samir Hazra
Power Generation and Energy Storage Integration for Wave Energy Conversion System
by Samir Hazra
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Doctor of Philosophy
Electrical Engineering
Raleigh, North Carolina
2017
APPROVED BY:
Dr. B. Jayant Baliga Dr. Srdjan Lukic
Dr. Xiangwu Zhang Dr. Subhashish Bhattacharya
DEDICATION
BIOGRAPHY
Samir Hazra was born to Ashalata and Sanjoy Hazra, at Khayranda, Ramnagar of the
district of East-Midnapore in the state of West Bengal in India. He has done his secondary
and higher secondary schooling from Khayranda P.K. Vidyapith and Gobra I.N.K.M High
School in 1999 and 2001 respectively under West Bengal Board of Education. Later, he
received the bachelor of engineering (B.E.) degree with honors in power engineering
from Jadavpur University, Kolkata, India, in 2005. After under-graduation, he worked at SIEMENS in Kolkata for a year in the Engineering and Commissioning (E&C)
depart-ment. Later, in 2006, he joined the Indian Institute of Technology, Kanpur and received
the Master of Technology (M.Tech.) degree in electrical engineering in 2008. From 2008
to 2011, he was with TVS Motors Company Ltd., Hosur, India, working as a Power
Electronics and Control Engineer for two and three wheeled vehicles.
In 2011, he joined the National Science Foundation (NSF) funded Engineering
Re-search Center, Future Renewable Electrical Energy Delivery and Management (FREEDM)
System Center, North Carolina State University, Raleigh, NC, USA to pursue Ph.D.
de-gree in electrical engineering. During his doctoral research, he worked at the FREEDM center as a research assistant. He has worked as a Power Electronics and Control Intern
at Danfoss (formerly Vacon), Raleigh.
His research interests include the application of wide band-gap power device, medium
voltage high power converter, motor drives, energy storage system, and renewable energy
ACKNOWLEDGEMENTS
My sincere gratitude to my advisor Prof. Subhashish Bhattacharya for giving me the
opportunity to work with him. I have received enormous support from him, without which
my Ph.D. study would not have been possible. I really appreciate his kind consideration
and believe in me to start the wave energy project.
I would like to express my gratitude to all my committee members including Prof.
Jayant Baliga, Prof. Srdjan Lukic and Prof. Xiangwu Zhang for their valuable inputs to strengthen my doctoral research. I specially thank Prof. Jayant Baliga, Prof. Subhashish
Bhattacharya and Prof. Iqbal Husain for the knowledge I gathered from their wonderful
teaching, which immensely helped me to conduct research in SiC power devices and
electrical machines.
I also sincerely thank all other faculty and staff members of the FREEDM System
Center for making this center a wonderful place for research, source of motivation and
full of energy. My special thanks to ever smiling wonderful Karen Autry for her warm
attitude to keep all of us cheerful always. I would like to sincerely thank lab manager
Mr. Hulgize Kassa for all the help in setting up my experimental set up and during the course of the experiments.
My sincere gratitude to Dr. VR V. Ramanan, Dr. Steven Englebretson and Dr. Wen
Ouyang from ABB USCRC for providing me an opportunity to work on their wave energy
project “Advanced Direct-Drive Generator for Improved Availability of Oscillating Wave
Surge Converter Power Generation Systems”. I really appreciate their kind consideration
for supporting my last year of Ph.D. through a fellowship program.
I deeply acknowledge the help and support of my dear friends Arun, Ajay, Boopaty,
Kasu, Prasenjit, Rudro, Sumit and Sayan. I also would like to thank enumerable other
FREEDM friends and colleagues who helped in small or big ways. My special thanks to Prathamesh, who worked with me in building the hardware set-up at various stages.
I deeply acknowledge the contribution of my teachers at various stages of my education
starting from schooling to my M.Tech. at IITK. All of their contributions towards my
career is simply tremendous. My special thanks to my M.Tech advisor Prof. Parthasarathi
Sensarma for the special teaching I received from him.
I finally, would like to thank my parents and brother for all of their care, love and
TABLE OF CONTENTS
LIST OF TABLES . . . ix
LIST OF FIGURES . . . x
Chapter 1 Introduction . . . 1
1.1 Background . . . 1
1.2 State of the Art of Power Conversion System . . . 2
1.2.1 Power Conversion with Conventional Power Architecture . . . 5
1.2.2 Peak to Average Power Ratio . . . 7
1.3 Scope of the Thesis . . . 8
1.4 Thesis Organization . . . 10
Chapter 2 Modeling of Wave Energy Converter . . . 12
2.1 Introduction . . . 12
2.2 Modeling of WEC Paddle . . . 12
2.2.1 Mechanical Torque on Paddle . . . 13
2.2.2 Mechanical Dynamics of Paddle Type WEC System . . . 22
2.2.3 Simulation of Paddle type WEC System . . . 23
2.3 Conclusion . . . 24
Chapter 3 Emulation of Wave Energy Converter . . . 26
3.1 Introduction . . . 26
3.2 System Description . . . 26
3.2.1 Rating of Motor and Generator . . . 28
3.2.2 Drives and Digital Controller . . . 28
3.2.3 Generator Voltage and Power . . . 29
3.2.4 Wave Data . . . 31
3.3 Oscillating Power Generation . . . 32
3.4 Emulation of WEC . . . 34
3.4.1 Inertia and Damping factor of Motor-Generator Setup . . . 35
3.4.2 Selection of Parameter of the WEC for Emulation . . . 37
3.4.3 Experimental Verification of Emulated WEC . . . 39
3.5 General Emulation of WEC System . . . 42
3.6 Conclusion . . . 43
Chapter 4 Doubly-Fed Induction Generator Based Power Architecture 45 4.1 Introduction . . . 45
4.2 DFIG Based Power Architecture . . . 45
4.3 Modeling of DFIG for WEC . . . 47
4.4.1 Stator Field Oriented Control . . . 50
4.4.2 Mode Transition Control . . . 52
4.4.3 Stator Flux Oscillation and Its Damping . . . 54
4.5 Closed Loop System Simulation Results . . . 63
4.6 Stator Side Power Architecture . . . 66
4.6.1 Thyristor Based Stator Supply Switching Circuit (SSC) . . . 66
4.6.2 Connection Change-Over from Grid to Short . . . 73
4.6.3 Connection Changeover from Shorted to Grid Side . . . 75
4.6.4 SSC with Reduced Number of Thyristors . . . 77
4.6.5 SSC Operation For DFIG in WEC System . . . 78
4.7 Conclusion . . . 79
Chapter 5 An Active Filter Enabled Power Architecture . . . 80
5.1 Introduction . . . 80
5.2 Power Architecture . . . 84
5.3 System Modeling and Control Strategy . . . 85
5.3.1 Current Dynamic Model . . . 86
5.3.2 Active Filter Dc Bus Voltage Dynamic Model . . . 88
5.3.3 Boost Converter Control . . . 90
5.3.4 Grid Side Converter Control . . . 90
5.3.5 Bandwidth of Control Design . . . 91
5.4 Development of Experimental Setup . . . 91
5.4.1 Motor-Generator Set-up . . . 95
5.4.2 Converters . . . 95
5.4.3 Passive Elements . . . 96
5.4.4 Auxiliary Power Circuits . . . 97
5.4.5 Sensing Elements . . . 97
5.4.6 Control Board . . . 97
5.4.7 Interface Circuit Board . . . 98
5.4.8 Control Power Supply - Grounding System . . . 99
5.5 Software Development . . . 100
5.5.1 Software Architecture . . . 100
5.5.2 State Chart . . . 100
5.5.3 ADC Sampling . . . 101
5.5.4 Speed and Position Measurement . . . 102
5.5.5 Position and Speed Measurement for PMSG . . . 103
5.6 Experimental Implementation . . . 104
5.6.1 Start-up Sequence . . . 104
5.6.2 Steady-State Results . . . 106
5.6.3 Active and Reactive Power . . . 108
5.7 Design of the Active Filter . . . 116
5.7.1 Impact of Machine Inductance . . . 117
5.7.2 Impact of Current Controller . . . 118
5.7.3 Experimental Validation . . . 120
5.7.4 Active Filter Design for PMSG . . . 125
5.8 Scaled-up System Design . . . 128
5.8.1 Active Filter Power Rating . . . 128
5.8.2 Dc-dc Boost Converter . . . 129
5.8.3 Passive Component Design . . . 131
5.8.4 Comparison with Conventional Fully-rated Converter . . . 132
5.9 Conclusion . . . 133
Chapter 6 Pole Modulated Permanent Magnet Synchronous Generator 134 6.1 Introduction . . . 134
6.2 Structure of Pole-Modulated PMSG . . . 135
6.3 Modeling of Pole-Modulated PMSG . . . 135
6.4 System Description and Control Design . . . 137
6.4.1 PMSG Current Controller Design . . . 137
6.4.2 DC link voltage control . . . 140
6.5 Experimental Validation . . . 141
6.5.1 Experimental Setup . . . 141
6.5.2 Encoder Drift Adjust . . . 142
6.5.3 Control Sequence . . . 143
6.5.4 Experimental Results . . . 144
6.6 Active and Reactive Power of Pole-Modulated Generator . . . 151
6.7 Application of Active Filter Based Power Architecture . . . 152
6.8 Conclusion . . . 152
Chapter 7 Integration of Energy Storage System . . . 154
7.1 Introduction . . . 154
7.2 Energy Storage Sizing . . . 156
7.2.1 Oscillating WEC Power . . . 156
7.2.2 Super-capacitor Energy Storage System . . . 159
7.2.3 Battery Energy Storage System . . . 161
7.2.4 Hybrid Energy Storage System . . . 163
7.2.5 Cost Estimation of Different Systems and Comparison . . . 164
7.3 Control Strategy of Hybrid Energy Storage . . . 166
7.3.1 Simulation of Hybrid Energy Storage . . . 167
7.4 Experimental Demonstration of HESS . . . 169
7.4.1 Experimental System Description . . . 169
7.4.2 System Modeling and Control . . . 170
7.5 Design and Control of DAB with Wide Range of Input Voltage and High
Gain Ratio . . . 177
7.5.1 Modeling of DAB . . . 178
7.5.2 Maximization of Power with Constraint on RMS Current - La-grange Multiplier . . . 181
7.5.3 Minimization of RMS Current for Constraint Power Flow . . . 185
7.5.4 DAB Hardware Design . . . 187
7.5.5 Experimental Results of DAB . . . 188
7.5.6 DAB Efficiency . . . 188
7.6 Conclusion . . . 189
Chapter 8 SiC Power Devices for Wave Energy Conversion System. . . 192
8.1 Introduction . . . 192
8.2 Gate Drive Design . . . 193
8.2.1 Ground Separation . . . 197
8.2.2 Shoot Through Protection . . . 199
8.2.3 High Current Drive . . . 200
8.2.4 Gate Design Extension for SiC JFET . . . 201
8.3 Dc-dc Converter Design with 1700V 50A SiC MOSFET . . . 206
8.3.1 Hard-Switching Characterization and Performance Comparison . . 207
8.3.2 Design Considerations of dc-dc Boost Converter . . . 219
8.3.3 Converter Operation and Efficiency Comparison . . . 223
8.3.4 Loss Breakdown and Analysis . . . 224
8.3.5 High switching performance of SiC MOSFET . . . 230
8.4 Two Level, Three Phase Converter with 1200V 100A SiC MOSFET . . . 233
8.4.1 SiC-MOSFET Module Characterization . . . 233
8.4.2 Comparison of SiC-MOSFET and Si-IGBT Based Converter . . . 244
8.4.3 Design Considerations of Three Phase Converter . . . 246
8.4.4 Converter Test Results . . . 249
8.5 Conclusion . . . 251
Chapter 9 Conclusion and Future Work . . . 252
9.1 General . . . 252
9.2 Summery of Present Work . . . 252
9.3 Scope of Future Work . . . 254
BIBLIOGRAPHY . . . 256
Appendices . . . 269
Appendix A Software for State Machine . . . 270
LIST OF TABLES
Table 2.1 Parameters for the Mechanical Simulation of WEC Paddle . . . 24
Table 3.1 Rating and Specifications of the Components of the Machine Setup . . 29
Table 3.2 Wave height polynomial constants . . . 32
Table 3.3 Parameters of the components of the Emulator . . . 38
Table 4.1 Stator flux active damping control design summary . . . 62
Table 4.2 Rating and Parameters of DFIG for Experiment . . . 64
Table 4.3 Specification of WEC used for simulation . . . 66
Table 4.4 Sectorwise Commutation - Grid to Short Terminal . . . 75
Table 4.5 Sectorwise Commutation - Short to Grid . . . 77
Table 4.6 Sectorwise Commutation with Reduced Number of Thyristors . . . 78
Table 5.1 Closed Loop Control Bandwidth . . . 91
Table 5.2 Rating and Specifications of the Components of the Machine Setup . . 96
Table 5.3 Rating and Specifications of the Passive Filter . . . 96
Table 5.4 Summary of Design Comparison . . . 132
Table 6.1 Rating and Specifications of the PM-PMSG . . . 139
Table 7.1 Attributes of Energy Storage Component . . . 164
Table 7.2 Cost of Energy Storage System . . . 166
Table 8.1 Device Specifications . . . 207
Table 8.2 Instrument Details . . . 211
Table 8.3 Circuit Components and Parasitics . . . 211
Table 8.4 Thermal resistances (in ◦C/W) . . . 221
Table 8.5 Gate Resistance and Voltage . . . 222
Table 8.6 Passive Components . . . 223
Table 8.7 Device Loss Estimation . . . 229
Table 8.8 Converter Loss Breakdown at 10.27 kW, 10 kHz . . . 229
Table 8.9 SiC MOSFET Loss Estimation at Different Switching Frequency . . . 231
Table 8.10 SiC MOSFET Based Converter Loss Breakdown at 10.27 kW . . . 232
Table 8.11 Separate Conduction and Switching Loss Comparison at 70 kVA, 0.8 p.f. and 10 kHz switching frequency . . . 246
LIST OF FIGURES
Figure 1.1 Buoy from Ocean Power Technologies. . . 2
Figure 1.2 Oyster wave energy device manufactured by Aquamarine . . . 3
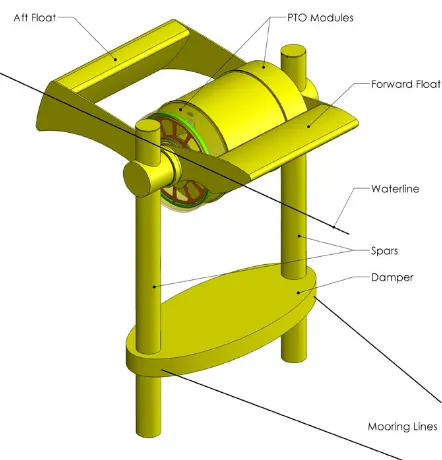
Figure 1.3 WEC designed by Columbia Power Technology. . . 3
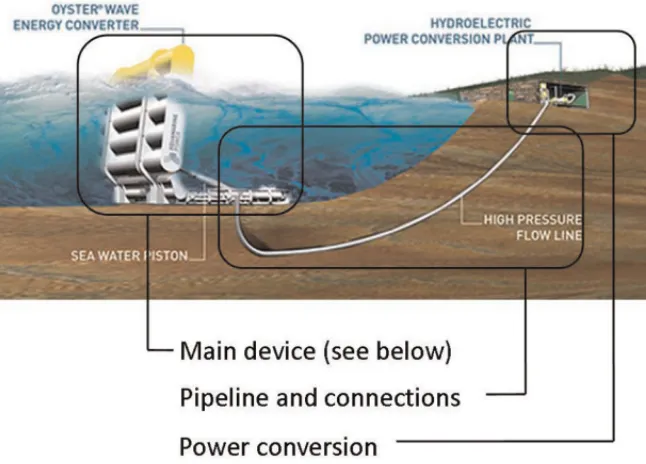
Figure 1.4 Present Oyster based wave energy conversion system (WECS) . . . . 4
Figure 1.5 Conventional power conversion system. . . 5
Figure 1.6 Indirect field oriented control scheme for SCIG. . . 5
Figure 1.7 Torque, Te and rotor speed, ωrm of the SCIG. . . 6
Figure 1.8 SCIG three phase stator (ias, ibs, ics) and rotor currents (iar, ibr, icr). . 7
Figure 1.9 SCIG d−q axes stator currents, ids and iqs. . . 7
Figure 1.10 Harvested instantaneous power from WEC. . . 8
Figure 1.11 Harvested electric energy for a period of 50 s. . . 9
Figure 2.1 Paddle movement in the fluid flow. . . 13
Figure 2.2 Paddle dimension. . . 14
Figure 2.3 Tangential velocity vectors at different conditions. Tangential velocity of WEC at different r, vt(r) varies from zero to ˆvt. Velocity of water, ut is uniform across the radius. . . 18
Figure 2.4 Paddle-generator system . . . 22
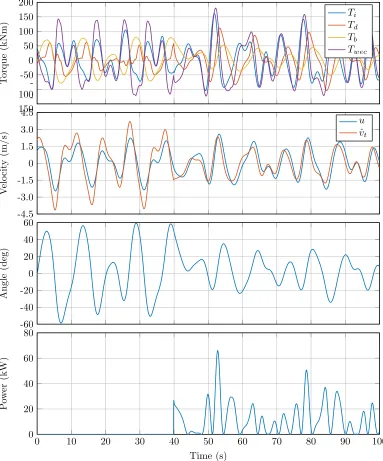
Figure 2.5 WEC paddle dynamic simulation. The loading on the WEC is initiated at time, t= 50 s. . . 25
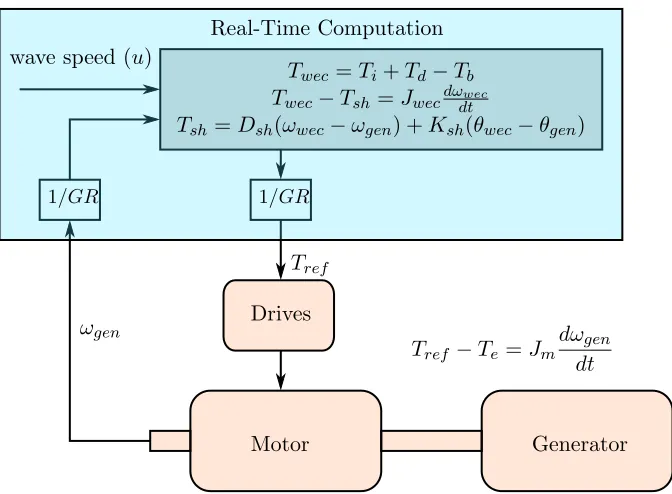
Figure 3.1 Actual WEC system and emulated system. . . 27
Figure 3.2 Experimental setup of the emulator of wave energy converter. . . 28
Figure 3.3 Oscillatory WEC position and velocity. . . 29
Figure 3.4 Practical wave profile. . . 32
Figure 3.5 Emulation of WEC with direct speed control of motor. . . 33
Figure 3.6 WEC emulation by speed control. Scale: Ch1, Speed reference (n∗r), Ch2, actual speed (nr) — 750 rpm/div. . . 34
Figure 3.7 WEC emulation by speed control. Scale: Ch6, speed of the generator (nr) — 200 rpm/div, Ch7, generator voltage (Vas) — 20 V/div. . . 35
Figure 3.8 WEC emulation by practical wave speed. Scale: Ch6, speed of the gen-erator (nr) — 1000 rpm/div, Ch7, generator voltage (Vas) — 100 V/div 36 Figure 3.9 Emulation of WEC by torque control of motor, torque reference to the motor derived by solving the WEC dynamics. . . 37 Figure 3.10 Total inertia and damping factor measurement of the motor and
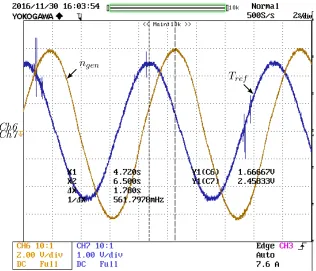
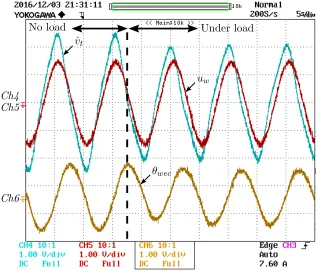
Figure 3.11 Dynamics of the WEC with loading and unloading of the WEC by the generator. Scale: Ch4, rotary speed of WEC (ωwec) — 1 rad·s−1/div,
Ch5, power output from the generator (Pgen) — 400 W/div, Ch6,
an-gular position of the WEC (θwec) — 57.3◦/div, Ch7, reference torque
to the motor (Tref) — 30.36 N·m/div. . . 39
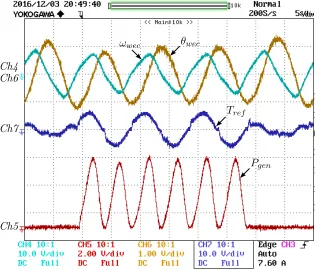
Figure 3.12 Components of torque generated on the WEC due to oscillating water. Scale: Ch4, inertia torque (Tb), Ch5, drag torque (Td), Ch6, buoyancy torque (Tb) — 1250 N·m/div. . . 40
Figure 3.13 WEC movement. Scale: Ch4, tip speed of the paddle (ˆvt) — 1 m· s−1/div, Ch5, water speed (u w) — 1 m·s−1/div, Ch6, WEC angular position (θwec) — 57.3◦/div. . . 41
Figure 3.14 Variation of characteristic radius, Rc. Scale: Ch4, tangential water velocity (ut) — 1 m· s−1/div, Ch5, tip speed of the paddle (ˆvt) — 2 m·s−1/div, Ch6, characteristic radius (R c) — 1 m/div. . . 42
Figure 3.15 Power output from WEC with variable loading. Scale: Ch4, rotary speed of WEC (ωwec) — 1 rad·s−1/div, Ch5, power output from the generator (Pgen) — 400 W/div, Ch6, angular position of the WEC (θwec) — 57.3◦/div, Ch7, reference torque to the motor (Tref) — 30.36 N·m/div. . . 43
Figure 3.16 WEC dynamics under practical wave speed profile. Scale: Ch4, rotary speed of WEC (ωwec) — 1 rad·s−1/div, Ch5, power output from the generator (Pgen) — 400 W/div, Ch6, angular position of the WEC (θwec) — 57.3◦/div, Ch7, reference torque to the motor (Tref) — 30.36 N·m/div. . . 44
Figure 4.1 Schematic of DFIG system for WEC . . . 46
Figure 4.2 Operating region of DFIG in proposed architecture . . . 47
Figure 4.3 Control architecture for DFIG operation in WECS . . . 50
Figure 4.4 Mode transition hysteresis comparator in the DFIG operation in WECS 53 Figure 4.5 Mode transition flow chart in the DFIG operation in WECS . . . 54
Figure 4.6 Location of sensors for implementation of proposed control scheme . 55 Figure 4.7 Grid flux angle computation scheme for DFIG in stator short condition 56 Figure 4.8 Vector diagram of the stator flux orientation . . . 56
Figure 4.9 Desired poles of different state feedback design cases . . . 62
Figure 4.10 Transients in stator flux in open loop as well as in closed loop cases . 63 Figure 4.11 Transients in angle between stator and grid flux in open loop as well as in closed loop cases . . . 64
Figure 4.12 Requirement of d-axis rotor current for active damping . . . 65
Figure 4.13 Requirement of q-axis rotor current for active damping . . . 65
Figure 4.14 Rotor variables of DFIG operating with oscillatory WEC . . . 67
Figure 4.15 Stator variables of DFIG operating with oscillatory WEC . . . 68
Figure 4.17 Rotor speed and stator flux synchronous speed . . . 70
Figure 4.18 Rotor voltage, current and d-axis damping current at mode transition from SFM to DFM . . . 71
Figure 4.19 Stator flux and grid flux angle . . . 72
Figure 4.20 D and q-axis flux components . . . 72
Figure 4.21 WEC oscillation with wave and its speed . . . 73
Figure 4.22 Thyristor based stator supply switching circuit (SSC). . . 74
Figure 4.23 Current and voltage vector position for natural commutation during grid to short mode changeover. . . 74
Figure 4.24 Vector diagram; (a) Sub-synchronous generation, (b) Generation with stator short, (c) Sub-synchronous motoring. . . 76
Figure 4.25 Current and voltage vector position for natural commutation during short to grid mode changeover. . . 76
Figure 4.26 Thyristor based stator supply switching circuit (SSC) with reduced number of switches. . . 77
Figure 4.27 Stator current lagging grid votage by 5π/6; commutation region is shaded. . . 78
Figure 5.1 Overall system configuration with moving flap type WEC. . . 80
Figure 5.2 Typical ocean wave profile [1]. . . 81
Figure 5.3 Fully-rated back to back power converter based energy conversion sys-tem. . . 81
Figure 5.4 Proposed power conversion circuit, marked portion is the power con-version unit (PCU) for a single WEC. . . 83
Figure 5.5 Control architecture of the power conversion unit. (a) Active filter control, (b) Boost converter current control. . . 85
Figure 5.6 Simplified circuit of the system. . . 87
Figure 5.7 Block diagram of the overall open loop system. . . 87
Figure 5.8 Frequency response of the control transfer functionGisvf =Is(s)/Vf(s). Gisvf0: Cf is the switching ripple filter without any damping, Gisvf1: Cf with the Lsw −Csw tank and passive damper Rd = 22 Ω, Gisvf2: Cf with the Lsw −Csw tank, passive damper Rd = 22 Ω and active damping, kd= 3. . . 89
Figure 5.9 Grid side converter control architecture. . . 91
Figure 5.10 Experimental setup for active-filter enabled power architecture. . . . 93
Figure 5.11 Schematic of power circuit, control power supply, digital control and interface board. . . 94
Figure 5.12 Encoder Mounting. . . 95
Figure 5.13 Control board from Oztek . . . 98
Figure 5.14 Interface circuit board. . . 99
Figure 5.15 Software architecture. . . 101
Figure 5.17 Speed measurement. . . 103 Figure 5.18 Offset angle for position estimation using incremental encoder. . . 104 Figure 5.19 Representative figure of position and speed measurement. . . 105 Figure 5.20 Start-up and operation of the system. Scale: Ch1,iaf — 20 A/div, Ch2,
ias — 20 A/div, Ch3,iao — 20 A/div, Ch4, ωrm — 41.89 rad·s−1/div,
Ch5, vdcf — 100 V/div. . . 106
Figure 5.21 Voltage build-up and current dynamics at the start of the power cycle. Scale: Ch1,iaf — 20 A/div, Ch2,ias— 20 A/div, Ch3,iao — 20 A/div,
Ch4, ωrm — 41.89 rad·s−1/div, Ch5, vdcf — 250 V/div, Ch6, ids —
10 A/div, Ch5, iqs — 20 A/div. . . 107
Figure 5.22 Power generation (3 kW) and harmonic compensation at 1200 rpm. Scale: Ch1,iaf — 50 A/div, Ch2,ias— 50 A/div, Ch3,iao — 20 A/div,
Ch5, vdcf — 100 V/div, Ch7, vabs — 500 V/div. . . 108
Figure 5.23 Power generation and harmonic compensation; an unbalanced rotor resistance is considered. . . 109 Figure 5.24 Power generation and harmonic compensation; balanced rotor
resis-tance is considered. . . 110 Figure 5.25 Grid side converter operation results. Scale: Ch1,iag — 10 A/div, Ch2,
vag — 200 V/div, Ch3,iao— 20 A/div, Ch4,ωrm— 41.89 rad·s−1/div,
Ch5, vout — 100 V/div. . . 111
Figure 5.26 Grid side current and voltage during full loading (3 kW) of the gener-ator. Scale: Ch1, iag — 10 A/div, Ch2, vag — 200 V/div, Ch3, iao —
20 A/div, Ch4, ωrn — 41.89 rad·s−1/div, Ch5, vout — 100 V/div. . . 112
Figure 5.27 Active power flow at different point of the system with sinusoidal wave speed. Scale: Ch1,Paf — 500 W/div, Ch2,Pgen— 1 kW/div, Ch3,Pout
— 1 kW/div. . . 113 Figure 5.28 Reactive power flow at different point of the system with sinusoidal
wave speed. Scale: Ch1, Qaf — 1 kVA/div, Ch2, Qgen — 1 kVA/div,
Ch3, Qout — 1 kVA/div. . . 113
Figure 5.29 Active power flow at different point of the system with wave data mentioned in [1]. Scale: Ch1,Paf — 1 kW/div, Ch2,Pgen — 1 kW/div,
Ch3, Pout — 1 kW/div, Ch4, ωrm — 209.44 rad·s−1/div. . . 114
Figure 5.30 Power flow through active filter, when step load is applied by boost converter control. Scale: Ch1,Paf — 1 kW/div, Ch2,P gen— 1 kW/div,
Ch3, Pout — 1 kW/div. . . 114
Figure 5.31 Power flow through active filter, when ramp load with ramp rate of 30 kW·s−1, is applied by boost converter control. Scale: Ch1, Paf —
1 kW/div, Ch2,P gen — 1 kW/div, Ch3, Pout — 1 kW/div. . . 115
Figure 5.33 Variation of harmonic current sharing between generator and active filter with different generator leakage inductances. Generator leakage inductance, σLs is considered to be 10 mH and 1 mH and the passive
filter inductance, Lf = 1 mH. . . 118
Figure 5.34 Closed-loop block diagram of the generator current control. . . 119
Figure 5.35 Harmonic current sharing between generator and active filter with dif-ferent bandwidth of generator current controller. Open loop (OL) and closed loop cases with bandwidth of 100 Hz, 500 Hz, and 1000 Hz are plotted. Generator leakage inductance, σLs = 10 mH and the passive filter inductance, Lf = 1 mH. . . 120
Figure 5.36 Loading waveform of the generator, running at 1060 rpm, is shown. Fundamental frequency is 53 Hz. . . 121
Figure 5.37 Generator current waveforms with different generator current (is) con-trol bandwidth. . . 121
Figure 5.38 FFT of non-liner load current,io, active filter current, if and the gen-erator current, is at the bandwidth of the current control of 500 Hz. Generator is running at 1060rpm. Fundamental frequency is 53 Hz. . 123
Figure 5.39 Percentage of harmonic current of io present in if, at different band-width of the current control. Generator is running at 1060 rpm. Fun-damental frequency is 53 Hz. . . 123
Figure 5.40 Percentage of harmonic current of io present in is, at different band-width of the current control. Generator is running at 1060 rpm. Fun-damental frequency is 53 Hz. . . 124
Figure 5.41 Percentage of harmonic current of io present in is, at different band-width of the current control. Generator is running at 1060 rpm. Fun-damental frequency is 52.5 Hz. . . 125
Figure 5.42 PMSG configured from a DFIG. . . 126
Figure 5.43 Measurement of inductance of the PMSG. Scale: Supply voltage, Vs — 5 V/div, winding current, is — 2 A. . . 126
Figure 5.44 Experimental waveforms of output, active filter and generator current in PMSG based system. . . 127
Figure 5.45 FFT of load current, active filter current and generator current in PMSG based system, showing only harmonic components. . . 128
Figure 6.1 Construction of the pole modulated permanent magnet generator. . . 136
Figure 6.2 Spatial representation of the PM-PMSG with control axes d−q. . . . 136
Figure 6.3 Overall circuit of the power conversion system. . . 138
Figure 6.4 Test current for estimating winding inductance of PMSG. . . 138
Figure 6.5 Bode plot of current control design. . . 139
Figure 6.6 Step response of closed loop current control system. . . 140
Figure 6.7 Experimental setup of stand-alone wave energy generation system. . . 142
Figure 6.9 Rotor position in the positive direction of rotation. Scale: Ch5, rotor speed, nr — 200 rpm/div. Ch6, back emf, eas — 40 V/div. Ch7, rotor
angle position from ph-a axis, θr — 2 rad/div. . . 144
Figure 6.10 Rotor position in the negative direction of rotation. Scale: Ch5, rotor speed, nr — 200 rpm/div. Ch6, back emf, eas — 40 V/div. Ch7, rotor
angle position from ph-a axis, θr — 2 rad/div. . . 145
Figure 6.11 Generator open circuit induced voltage and inverter reference voltage before relay closure and inverter modulation. Scale: Ch1, generator open circuit voltage,vas — 50 V/div. Ch2, converter reference voltage,
vas∗ — 50 V/div. Ch3, q-axis reference voltage vq — 50 V/div. Ch4,
d-axis reference voltage, vd — 50 V/div. . . 145
Figure 6.12 Output voltage dynamics under oscillating power generation. Scale: Ch1, dc link voltage,vout— 100 V/div. Ch2, rotor speednr— 200 rpm/div.
Ch3, battery voltage, vbat — 25 V/div. Ch4, generator current, ias —
5 A/div. . . 146 Figure 6.13 Oscillating power generation with limit on generator current. Scale:
Ch1, generator q-axis current, iqs — 5 A/div. Ch2, rotor speed, nr
250 rpm/div. Ch3, generator power,Pgen— 500 W/div. Ch4, generator
line current, ias — 5 A/div. . . 147
Figure 6.14 Change of limit on generator current. Scale: Ch1, generator q-axis current, iqs — 5 A/div. Ch2, rotor speed, nr — 250 rpm/div. Ch3,
generator power, Pgen — 500 W/div. Ch4, generator line current, ias
— 5 A/div. . . 147 Figure 6.15 Transient at change of limit on generator current. Scale: Ch1, generator
q-axis current, iqs — 5 A/div. Ch2, rotor speed, nr — 250 rpm/div.
Ch3, generator power, Pgen — 500 W/div. Ch4, generator line current,
ias — 5 A/div. . . 148
Figure 6.16 Torque profile of PMSG in oscillating operation. Scale: Ch1, rotor speed, nr — 50 rpm/div. Ch2, generated power, Pgen — 200 W/div.
Ch3, modulation signal, ma — 0.5/div. Ch4, generator torque, Te —
10 N·m/div. . . 149 Figure 6.17 Torque profile of PMSG in oscillating operation. Scale: Ch1, rotor
speed, nr — 125 rpm/div. Ch2, generated power, Pgen — 200 W/div.
Ch3, inverter modulation signal,ma— 0.5/div. Ch4, generator torque,
Te — 20 N·m/div. . . 150
Figure 7.1 Power architecture of multiple WECs with integrated energy storage system. . . 154 Figure 7.2 Speed and power data from a real WEC system. . . 156 Figure 7.3 Paddle type WEC movement. . . 157 Figure 7.4 Position, speed and power generated from the WEC under single
Figure 7.5 Super-capacitor model. . . 159
Figure 7.6 Power and energy rating of energy storage system (ESS). . . 162
Figure 7.7 Battery model. . . 162
Figure 7.8 Frequency spectrum of the WEC power. . . 163
Figure 7.9 Separation of power of two different frequency spectrum. . . 164
Figure 7.10 Power and energy rating of super-capacitor and battery of HESS system.165 Figure 7.11 Simplified model of the hybrid energy storage connected to the grid-tied WEC generation system. . . 166
Figure 7.12 Control architecture of the HESS. . . 167
Figure 7.13 HESS system simulation. . . 168
Figure 7.14 Circuit digram of the HESS system connected with the emulated WEC system. . . 169
Figure 7.15 Experimental test-bed for hybrid energy storage system implementation.173 Figure 7.16 Start-up and operating sequence of the system. t0: Pre-charge of the grid side converter dc bus, t1: Grid side dc voltage control enabled,t2: Super-capacitor charging from an initial voltage of 6 V,t3: SC charging ends,t4: GSC releases control on dc bus voltage,t5: SC control on GSC dc bus voltage, t6: Battery is connected in to the system, t7: Power generation from WEC starts. . . 175
Figure 7.17 Steady-state HESS operation. . . 176
Figure 7.18 Battery energy storage disconnection and connection on the fly. . . . 177
Figure 7.19 Dual active bridge circuit. . . 178
Figure 7.20 Dual active bridge primary and secondary voltage waveform. . . 179
Figure 7.21 Components of power at fundamental (P1) and 3rd (P3) and 5th (P5) harmonic frequency. . . 180
Figure 7.22 Harmonic active power as the percentage of total power. . . 180
Figure 7.23 DAB converter and transformer. . . 188
Figure 7.24 Transformer saturation due to misfiring of the bridges. . . 189
Figure 7.25 DAB variables at power delivered from the super-capacitor to the grid during super-capacitor discharge mode. Current limit is set at 15 A. Scale: Ch1, vout — 100 V/div, Ch2,isdc — 2 A/div, Ch5,vsdc — 250 V/div, Ch6, vpdc — 25 V/div, Ch7, ipdc — 20 A/div. . . 190
Figure 7.26 DAB variables at power absorbed by the super-capacitor from the grid during super-capacitor charge mode. Current limit is set at 30 A. Scale: Ch1, vout — 100 V/div, Ch2,vpdc — 25 V/div, Ch3,vsdc — 250 V/div, Ch4, ipdc — 20 A/div, Ch5, isdc — 2 A/div. . . 191
Figure 7.27 Efficiency of the DAB with different super-capacitor voltage. . . 191
Figure 8.1 Eight channel gate drive board, top side. . . 194
Figure 8.2 Eight channel gate drive board, bottom side. . . 194
Figure 8.3 Layout of one gate drive channel. . . 195
Figure 8.5 Measurement of common mode current through the gate driver. . . . 197 Figure 8.6 Common mode current from single source during turn-on of the
de-vice. Scale: Ch2, device voltage,vsw — 250 V/div, Ch3, total common
mode current, icm — 0.2 A/div, Ch5, dc link voltage, vout — 250 V/div. 198
Figure 8.7 Common mode current from single source during turn-off of the de-vice. Scale: Ch2, device voltage,vsw — 250 V/div, Ch3, total common
mode current, icm — 0.2 A/div, Ch5, dc link voltage, vout — 250 V/div. 199
Figure 8.8 Separate paths for common mode current during turn-on of the de-vice. Scale: Ch1, common mode current through isolated power supply,
icm−ps — 0.2 A/div, Ch2, device voltage,vsw — 250 V/div, Ch3,
com-mon mode current through opto-coupler, icm−op — 0.2 A/div, Ch5, dc
link voltage, vout — 250 V/div. . . 200
Figure 8.9 Separate paths for common mode current during turn-off of the de-vice. Scale: Ch1, common mode current through isolated power supply,
icm−ps — 0.2 A/div, Ch2, device voltage,vsw — 250 V/div, Ch3,
com-mon mode current through opto-coupler, icm−op — 0.2 A/div, Ch5, dc
link voltage, vout — 250 V/div. . . 201
Figure 8.10 Shoot-through protection of the gate drive with the device operating with 800V dc link voltage. Scale: Ch1, Vgs — 20 V/div, Ch2, vds —
200 V/div, Ch3, switch current, Id — 50 V/div. . . 202
Figure 8.11 High current drive of the gate drive with emitter-follower amplification. Unit: Drive and gate current in A, gate voltage in V . . . 203 Figure 8.12 Gate currentig and voltagevgs during turn-on of the device. Scale:vgs
— 5 V/div, ig — 1 A/div. . . 203
Figure 8.13 Gate currentig and voltagevgs during turn-off of the device. Scale: vgs
— 5 V/div, ig — 1 A/div. . . 204
Figure 8.14 Circuit schematic of the extended gate drive for switching cascode JFET.204 Figure 8.15 One channel of the gate drive for the cascode JFET switching. . . 205 Figure 8.16 1700 V,42 A Si BiMOSFET, 1700 V,32 A Si IGBT and 1700 V,50 A
SiC MOSFET in TO-247 package. . . 206 Figure 8.17 Double pulse test circuit for device characterization under hard-switching
operation. . . 207 Figure 8.18 Hard-switching characterization circuit board. . . 208 Figure 8.19 Device heating arrangements for temperature characterization. . . 209 Figure 8.20 DP test waveform. Scale: Device voltage, Vds — 200 V/div, Device
current, Id — 50 A/div, Gate voltage,Vgs —10 V/div, Time — 2µs/div.209
Figure 8.21 Switching characteristics of SiC MOSFET,Rg = 20 Ω andTj = 125◦C.
Eon = 3.88 mJ and Eof f = 2.16 mJ; Scale: Vds — 250 V/div, Id —
Figure 8.22 Switching characteristics of Si IGBT at Rg = 5 Ω and Tj = 125◦C.
Eon = 6.6 mJ, Eof f = 19.8 mJ. Scale: Vce — 250 V/div,Ic— 15 A/div,
Vge— 20 V/div, Time — 100 ns/div (Turn-ON), 400 ns/div (Turn-OFF).212
Figure 8.23 Switching characteristics of Si BiMOSFET at Rg = 5 Ω and Tj =
125◦C. Eon = 6.1 mJ, Eof f = 25.2 mJ. Scale: Vce — 250 V/div, Ic —
15 A/div, Vge — 20 V/div, Time — 100 ns/div (Turn-ON), 400 ns/div
(Turn-OFF). . . 213 Figure 8.24 Switching loss variation with gate resistance,Rg; Junction temperature
of SiC MOSFET, Tj = 125◦C; Junction temperature of IGBT and
BiMOSFET, Tj = 25◦C; dc bus voltage, Vdc = 1200 V; switch current
= 40 A. . . 214 Figure 8.25 Switching characteristics of SiC MOSFET at Rg = 10 Ω and Tj =
125◦C.Eon = 2.28 mJ, Eof f = 1.08 mJ. Scale: Vds — 250 V/div, Id —
15 A/div, Vgs — 20 V/div, Time — 50 ns/div . . . 215
Figure 8.26 Switching loss comparison at different switch current; Gate resistance for IGBT and BiMOSFET, Rg = 5 Ω; Gate resistance for SiC
MOS-FET, Rg = 20 Ω;Tj = 125◦C and dc bus voltage, Vdc = 1200 V. . . . 216
Figure 8.27 Switching loss variation with junction temperature,Tj; gate resistance
for IGBT and BiMOSFET, Rg = 5 Ω; gate resistance for SiC
MOS-FET, Rg = 20 Ω; dc bus voltage,Vdc= 1200 V; switch current= 40 A. 217
Figure 8.28 Forward characteristics of IGBT (Vge = 15 V), BiMOSFET (Vge =
15 V) and SiC MOSFET (Vgs = 20 V) at different junction temperature.218
Figure 8.29 Boundary of converter operating points with 150 W of heat dissipation from the device for maximum junction temperature of 125◦C. . . 219 Figure 8.30 Three dc-dc boost sections built using SiC MOSFET, Si IGBT and Si
BiMOSFETs in same converter setup. . . 220 Figure 8.31 Maximum heat dissipation and corresponding heat sink temperature. 222 Figure 8.32 Turn-ON and OFF dv/dt and di/dt of SiC MOSFET at different gate
resistance, Rg atTj = 30◦C. . . 223
Figure 8.33 Dc-dc boost converter circuit setup for experiment. . . 224 Figure 8.34 Converter operation at operating point (10 kW and 10 kHz). Scale:
Vds, Vce — 500 V/div, Vo — 250 V/div, IL, Io — 5 A/div, Time —
40µs/div. . . 225 Figure 8.35 Converter efficiency measured with fixed load resistance. . . 226 Figure 8.36 Forward characteristics of SiC Schottky diode. . . 227 Figure 8.37 Thermal images indicating heat sink temperature at the vicinity of the
device in each case; Operating point ⇒ (10 kW, 10 kHz). . . 227 Figure 8.38 (a)Thermal simulation of heat sink temperature rise with power loss
Figure 8.39 SiC MOSFET based converter operation at 10.27 kW output. Scale:
Vds — 500 V/div,Vo — 250 V/div,IL, Io — 5 A/div, Time — 20µs/div
(40kHz), 10µs/div (100kHz, 150kHz). . . 230 Figure 8.40 Thermal image of heat sink of SiC MOSFET based converter operating
at 10.27 kW output . . . 231 Figure 8.41 SiC MOSFET based converter efficiency variation with switching
fre-quency. . . 232 Figure 8.42 1200 V,100 A SiC MOSFET based voltage source converter. . . 233 Figure 8.43 1200 V,100 A SiC MOSFET module made from parallel dies. . . 234 Figure 8.44 V-I characteristics of SiC MOSFET and anti-parallel SiC Schottky
diode at 125◦C and gate voltage of +20/−5 V [2]. . . 234 Figure 8.45 1200 V,100 A SiC MOSFET output capacitance (Coss) at 1 MHz. . . 235
Figure 8.46 Parasitics in the DP test circuit . . . 235 Figure 8.47 DP test setup for device characterization. . . 236 Figure 8.48 Turn ON characteristics at Rg = 15 Ω and Tj = 125◦C. Measured
Eon = 8.2 mJ. Scale:Vds — 200 V/div,Id— 50 A/div,Vgs— 10 V/div,
Energy — 5 mJ/div, Time — 200 ns/div. . . 237 Figure 8.49 Turn OFF characteristics with Rg = 15 Ω and Tj = 125◦C, Eof f =
5 mJ, Scale: Vds — 200 V/div,Id— 50 A/div, Vgs — 10 V/div, Energy
— 5 mJ/div, Time — 200 ns/div. . . 238 Figure 8.50 Eon and Eof f measured with Rg = 5 Ω and Tj = 125◦C at different
device currents, Id and device voltages, Vds. . . 238
Figure 8.51 Eon and Eof f measured with Rg = 5 Ω at Vds = 600 V,Id = 100 A at
different junction temperatures, Tj. . . 239
Figure 8.52 Module turn ON characteristics at Rg = 15 Ω and Tj = 125◦C,Eon =
10.5 mJ, Scale:Vds — 200 V/div,Id — 50 A/div,Vgs — 10 V/div,
En-ergy — 5 mJ/div, Time — 200 ns/div. . . 239 Figure 8.53 Module turn OFF characteristics atRg = 15 Ω and Junction
Tempera-ture = 125◦C,Eof f = 5.2 mJ, Scale:Vds — 200 V/div,Id — 50 A/div,
Vgs — 10 V/div, Energy — 5 mJ/div, Time — 200 ns/div. . . 240
Figure 8.54 Turn ON transient behavior with different gate resistances,Rg at
junc-tion temperature, Tj = 125◦C. . . 241
Figure 8.55 Turn OFF transient behavior with different gate resistances, Rg at
junction temperature, Tj = 125◦C. . . 242
Figure 8.56 Eon and Eof f measured with Rg = 5 Ω and Tj = 125◦C at different
device currents, Id. . . 243
Figure 8.57 Eon and Eof f measured with different gate resistances, Rg at Vds =
800 V, Id= 100 A and Tj = 125◦C. . . 243
Figure 8.58 SiC MOSFET and Si IGBT based converter loss (Ploss) comparison at
Figure 8.59 SiC MOSFET and Si IGBT based converter efficiency comparison at different loads (P) at unity power factor (p.f.) . . . 245 Figure 8.60 Sandwiched bus bar designed for SiC MOSFET based 2L-VSC. . . . 247 Figure 8.61 Parasitics of the converter circuit. . . 247 Figure 8.62 Device voltage overshoot without snubber capacitors,Rg = 5 Ω. Scale:
Vds — 200 V/div,IL — 50 A/div, Vgs — 10 V/div. . . 248
Figure 8.63 Device voltage overshoot with snubber capacitors,Rg = 5 Ω. Scale:Vds
— 200 V/div, IL — 50 A/div, Vgs — 10 V/div. . . 249
Figure 8.64 1200 V,100 A SiC MOSFET based packaged 2L-VSC. . . 250 Figure 8.65 Converter supplying load of 35 kVA. Scale: Line current,Iload— 50 A/div,
Converter line voltage, Vconv — 500 V/div, Load line voltage,Vload —
500 V/div, Time — 2 ms/div. . . 250 Figure 8.66 Parallel operation of two converters in open loop supplying total load of
50 kVA. Scale: Load current,Iload, Converter-1 current,Iconv1, Converter-2 current,Iconv2— 50 A/div, Converter line voltage,Vconv— 1000 V/div,
Chapter 1
Introduction
1.1
Background
Ocean wave is a potential source of renewable energy to achieve sustainable development. As per the report published by the Electric Power Research Institute (EPRI) in [1],
the available total energy along the U.S. continental shelf edge is estimated to be 2640
TWh/yr. The total recoverable energy is estimated as 1170 TWh/yr. Compared to wind
and photo-voltaic renewable energy sources, the wave energy has the highest energy
density.
In recent years there has been considerable interest in generating renewable energy
from the ocean wave. The energy in ocean wave manifests in two different forms, potential
and kinetic energy. Potential energy exists in heaving motion, where the energy can be
extracted based on the height of the wave. Whereas, the kinetic energy is present in surge motion of the wave, where the energy can be extracted based on the speed of the wave.
Although energy generation from ocean wave is not so cost competitive as of today
as compared to wind and photo-voltaic systems, the ocean wave has huge potential
of generating renewable energy in future. Therefore, several research and commercial
projects are being carried out to explore various cost effective options. So far, research has
been progressing well in designing several types of wave energy converters (WEC) [3–5],
to convert the wave energy into useful mechanical energy. Their design mostly depends
on the location of their installation at sea. In offshore, the wave energy is available in
the form of potential energy from the vertically oscillating water column and hence point
in Figure 1.1 is one of such examples [3]. The oscillating water column excites the buoy
into heaving motion. The excitation force is generated mostly by the buoyancy of the
buoy. Part of the excitation force is contributed from the drag of the water.
Figure 1.1: Buoy from Ocean Power Technologies.
At near-shore locations, paddle like WEC can generate power from the kinetic energy
of the back and forth motion of the sea water. Aquamarine Power’s Oyster is one of such
WEC devices [6] which is generally installed at near-shore location. The paddle rotates
back and forth at a speed corresponding to the wave surge. The torque developed on
the paddle is mostly due to the drag and acceleration forces of the wave. To utilize both potential and kinetic energy of the wave, Columbia Power Technology has invented a
WEC as shown in Figure 1.3. There are various other types of WECs that are also being
developed.
1.2
State of the Art of Power Conversion System
Although the research in developing the mechanical wave energy converter is an on-going
Figure 1.2: Oyster wave energy device manufactured by Aquamarine
Figure 1.3: WEC designed by Columbia Power Technology.
non-optimal electrical system. As an example, the Oyster drives hydraulic piston to
accumulate pressurized sea water in an accumulator. From accumulator the pressurized
turbine is driven by impinging the pressurized water on it. The turbine drives a generator
to generate the electricity. However, with the increase of power rating of such WEC, the
hydraulic system design can become very expensive. The architecture of the hydraulic
system based energy conversion from Oyster is depicted in Figure 1.4.
Figure 1.4: Present Oyster based wave energy conversion system (WECS)
Coupling an electrical generator directly to the shaft of the WEC can reduce the
complexity of the whole system. A linear generator can generate power from the linear
oscillation of the buoy [7], [8]. Whereas, a rotary generator can generate power directly
from the rotating shaft of the paddle type of WEC as reported in [9,10]. There are various
other works on wave energy are reported in [11–24]
Since the speed of the WEC is around 5−7 rpm, the generator size is higher if the generator is directly coupled with the shaft of the WEC. Therefore, gearing arrangements
are necessary if the smaller size generator to be used. The gears can be mechanical or
1.2.1
Power Conversion with Conventional Power Architecture
A conventional power architecture of back to back power converters is shown in Figure 1.5.
The generator can be a permanent magnet synchronous generator (PMSG) or a
squirrel-cage induction generator (SCIG). Power generated by the SCIG with the conventional
power architecture is analyzed in this section. The detailed description of the work can
be found in [25].
MSC GSC Sea Wave
Grid Trafo Filter
WEC Generator
Figure 1.5: Conventional power conversion system.
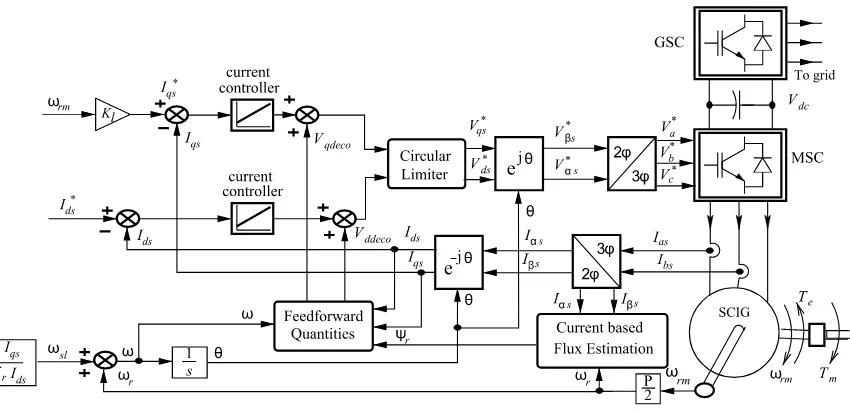
Figure 1.6: Indirect field oriented control scheme for SCIG.
The control architecture of power generation by SCIG is shown in Figure 1.6. The
control is implemented through indirect field oriented control (IFOC) scheme. The loading
for the active power generation. The induction machine power rating is 410 kW. From
the magnetizing inductance and rated voltage of the machine the d−axis rated current reference can be computed to be 440 A. The generator is loaded in the proportion of rotor
speed.
The SCIG torque and rotational speed are given in Figure 1.7. As expected the torque
which is exhibited as a reaction force on the WEC, is oscillatory. In Figure 1.8, the stator
Figure 1.7: Torque, Te and rotor speed, ωrm of the SCIG.
and rotor three phase currents are given. When WEC velocity becomes zero at the crests
and troughs the rotor current becomes zero. However, stator current continues to be
supplied to keep the machine flux maintained and it changes phase sequence at each
speed reversal. At peak power generation by the SCIG the stator current reaches its
maximum. In control domain, to keep the magnetic flux in the machine at its rated value
throughout the entire operation, the d−axis current is maintained constant. The q−axis current is controlled to track the variation of the command which is derived from the rotor speed. Here, the q−axis current is controlled in proportion with rotor speed. The
Figure 1.8: SCIG three phase stator (ias, ibs, ics) and rotor currents (iar, ibr, icr).
Figure 1.9: SCIG d−q axes stator currents, ids and iqs.
1.2.2
Peak to Average Power Ratio
In Figure 1.10, the instantaneous power generated from the WEC is shown. The peak
period of 50 s is given and it is found that the average power generated is 70 kW. Due
to this high ratio of peak to average power which is 5.7 here, the SCIG and associated
power electronic converters are underutilized significantly for power generation from a
typical WEC system.
Figure 1.10: Harvested instantaneous power from WEC.
1.3
Scope of the Thesis
As simulated with conventional power architecture, a full-rated voltage source converter
is connected with the generator to generate power. In wind energy conversion system,
the use of the doubly-fed induction generator (DFIG) allows to control the total power
generation only by accessing the slip power of the generator. The maximum slip power
can account for about 30% of the total power of the generator. Therefore, the DFIG based power architecture is very popular in wind energy conversion system. Hence, the
DFIG based power architecture is investigated to find out its usefulness for the wave
energy converter.
Also, an active power filter based power architecture is proposed to generate
Figure 1.11: Harvested electric energy for a period of 50 s.
generate power both using PMSG and SCIG. The cost-effectiveness of the active filter is
achieved by operating it in lower switching frequency.
To validate the proposed power architecture, an emulator of the wave energy converter
is developed. The emulator is built by controlling a motor which drives the generator. The
motor is either controlled in speed or torque control mode, to suit the requirement. In
speed control mode, oscillatory speed is used as reference to generate oscillatory power. In
optimal control of generator power the dynamics of the WEC is important and included
in the emulation to provide torque reference for the motor.
Since the wave energy conversion system (WECS) generates oscillatory power,
injec-tion of this oscillatory power directly to the grid can cause potential instability of the
grid, especially for the weak grid situations. Therefore, the design requirement of the energy storage system is analyzed.
Bandwidth requirement of the grid-tied converter is higher for high penetration of
renewable energy into the grid. With higher amount of renewable energy integration to
the grid, the stability of the grid can be affected. In those cases, to keep the renewable
sources connected with the grid, the high bandwidth of the grid-tied converter can be one
major requirement. To operate converter with high bandwidth control loop, the switching
frequency requirement is high. Also, the energy storage system requires high efficiency
the silicon carbide (SiC) MOSFET devices are characterized, and evaluated in dc-dc
converter and three phase inverter.
1.4
Thesis Organization
The thesis is organized as follows,
In Chapter 2, the mathematical modeling of the oscillatory WEC is derived. A simple mathematical model is necessary to program the dynamics of the WEC
devices to emulate the WEC system in laboratory to verify the electrical system
and power conversion algorithms.
Chapter 3 reports the emulation of the WEC paddle by an electric motor in a rotary wave energy conversion system. The emulated WEC, drives the generator
to generate oscillatory power.
In Chapter 4, a power architecture with doubly-fed induction generator (DFIG) is proposed to reduce the size of the power converter. The DFIG based power
archi-tecture is well known for the power generation from wind energy. In this chapter,
the requirement to suitably modify the power architecture of the DFIG to suit for
the wave energy generation is presented.
In Chapter 5, an active filter enabled power architecture is presented to generate power with lower component size at a lower cost. In this chapter, the lower switching frequency requirement for the active filter is mathematically proven. The controller
bandwidth of the active filter is discussed by operating the system at different
bandwidths. The dependency of the active filter design on the generator inductance
is verified by operating a PMSG, which has higher inductance than the SCIG.
In Chapter 6, low speed pole-modulated permanent magnet generator designed and developed by ABB, USCRC, is characterized. The power electronic system is built to control the oscillatory power from the generator.
In Chapter 7, an energy storage system requirement for the wave energy system is discussed. The requirement of a hybrid energy storage system is systematically
eval-uated. A hybrid energy storage system is designed and developed in experimental
In Chapter 8, the design consideration and performance evaluation of three phase inverter and dc-dc boost converter using SiC devices is reported. Starting from the
gate drive design consideration, device characterization and systematic design of the
converter are elaborated. The performance of the SiC MOSFET based converters
is compared with the Si IGBT based converters on the basis of the efficiency and
Chapter 2
Modeling of Wave Energy Converter
2.1
Introduction
To design and develop the electrical system for the power generation from the wave en-ergy converter (WEC), the dynamic behavior of the WEC is essential. From the dynamic
behavior of the WEC, the torque speed characteristics of the generator can be designed.
Also, in experimental test-bed an emulated WEC is required to validate the developed
electrical system with close approximation with the actual system. The mechanical
simu-lation of the WEC is presented in various literatures to compute the mechanical force on
the WEC by the wave motion [26]. However, simple model which can be used to emulate
the WEC in real-time to generate power from the WEC, needs to be developed. In this
work, kinetic equations are used to compute the force and torque on a paddle type of
WEC. With the developed force and torque expressions, the mechanical dynamic model of the entire system including the generator is developed.
2.2
Modeling of WEC Paddle
The paddle type of WEC as shown in Figure 2.1, is installed near the seashore and is
driven by the kinetic energy of the sea wave. The mechanical torque applied by the sea
water on the paddle is calculated and the mechanical dynamic equations are developed
2.2.1
Mechanical Torque on Paddle
The force (Fmor) on a moving body submersed in an oscillatory flow can be computed
by the Morison Equation as given below [27],
Fmor =ρwVu˙
| {z }
Ff k
+ρwCaV( ˙u−v˙)
| {z }
Fh
+1
2ρwCdA(u−v)|u−v|
| {z }
Fd
(2.1)
where, Ff k: Froude-Krylov force, Fh: hydrodynamic mass force, Fd: drag force. Cd is
the drag coefficient, Ca is the added mass coefficient, ρw is the density of the fluid, A is
the area of the body facing to the flow, V is the volume of the body, u and v are the velocity of the fluid and the body in the same direction. The direction of the total force is also in the direction of the velocityu. The Froude-Krylov force,Ff k and hydrodynamic
mass force,Fh together is termed as inertia force, Fi.
Fi =Ff k+Fh (2.2)
The paddle, submersed in the sea water as shown in Figure 2.1, rotates back and forth
θwec
u ωwec
vt
u
ut θwec R
dr
C
u y
du dy
r
D
Figure 2.1: Paddle movement in the fluid flow.
around a pivot C. The torque on the paddle is computed at an angular position, θwec,
measured from a vertical reference. Angular speed and position of the paddle is considered
to be u. For simplicity, the water flow is assumed to be laminar. Although, the velocity gradient (du/dy) formed due to viscosity and shear stress, in this analysis considering the pivot of the paddle is located at a height from the sea bed, the water flow across the
paddle area is considered to be uniform.
Due to rotary motion of the paddle, the linear velocity of the paddle along its radius
(r) is not same. Consequently the force developed on the paddle also varies along the radius. Therefore, the total force and torque on the paddle are calculated by integrating
the elementary differential force over the radius. It is also considered that the paddle is
always completely submerged. The width, uniform depth and radius of the paddle are assumed to be W, D and R respectively as shown in Figure 2.2.
W
R
D
Figure 2.2: Paddle dimension.
For computing force and torque, a small section of the paddle of the elementary length of dr is chosen at a radius r from the pivot C. Elementary force components are computed on this element and integrated over the radius of the paddle to find the total
force and torque on the paddle. The volume and face area of the elementary body is,
dV =W Ddr, dA=W dr (2.3)
Since the paddle rotates around a fixed pointC, the velocity of the water and the paddle
velocity and acceleration of the water and paddle at an angular position of θwec are,
ut=ucosθwec, u˙t= ˙ucosθwec, vt =rθ˙wec, v˙t =rθ¨wec (2.4)
where, ut and vt are the tangential linear velocity of the water and the paddle and ˙ut
and ˙vt are the tangential acceleration of the water and the paddle. ˙θwec and ¨θwec are the
angular speed and acceleration of the paddle. As can be seen from (2.4) that the speed and acceleration at the elementary section on the paddle is dependent on the radius of
the element.
2.2.1.1 Computation of Froude-Krylov Torque, Tf k
The elementary Froude-Krylov force on the elementary body in the tangential direction
of the paddle movement, at angular positionθwec, can be found from (2.1) as,
dFf k =ρw(W Ddr) ˙ut=ρw(W Ddr)( ˙ucosθwec) (2.5)
The torque on the paddle due to elementary force dFf k becomes
dTf k =ρw(W Ddr)( ˙ucosθwec)r (2.6)
The total Froude-Krylov torque on the paddle thus can be found by integrating all the
torque elements along the radius of the paddle as,
Tf k =ρwW Du˙cosθwec
Z R 0
rdr=ρwW Du˙cosθwec
R2
2 =ρwVu˙cosθwec
R
2 (2.7)
where, R is the radius of the paddle.
2.2.1.2 Computation of hydrodynamic mass torque, Th
The elementary hydrodynamic mass force,dFh in the tangential direction is
dFh =ρwCa(W Ddr) ( ˙ut−v˙t) =ρwCa(W Ddr)
˙
ucosθwec−rθ¨wec
The corresponding elementary hydrodynamic mass torque, dTh is
dTh =ρwCa(W Ddr)
˙
ucosθwec−rθ¨wec
r (2.9)
The total hydrodynamic mass torque, Th can be computed as,
Th = ρwCaW D
Z R 0
ru˙cosθwec−r2θ¨wec
dr (2.10)
= ρwCaW D
R2
2 u˙cosθwec−
R3 3
¨
θwec
= ρwCaV
R
2u˙cosθwec−
R2
3 ¨
θwec
2.2.1.3 Computation of drag torque, Td
The elementary drag force can be expressed as,
dFd=
1
2ρwCd(W dr)(ut−vt)|ut−vt| (2.11) To compute the total drag force on the paddle by integration dFd over radius r as given
in (2.11), the sign of the term (ut−vt) needs to be evaluated. Although ut is constant
over the entire paddle,vtvaries along the radius. Therefore, the sign of the term (ut−vt)
depends on operating conditions. Based on the sign of (ut−vt), the limits of the integral
changes dynamically. Different operating conditions at which the drag force expression
can be explicitly found out, are looked into. A characteristic radius Rc is defined as
Rc=
ut
˙
θwec
(2.12)
From the expression in (2.12), it can be found that the Rc is ranged from −∞ to +∞.
With computed Rc, various operating conditions can now be defined. The maximum
tangential velocity of the paddle at the tip, can be be given as,
ˆ
vt=Rθ˙wec (2.13)
(ut−vt) =
≥0, ∀ r if ∞> Rc ≥R and vt≥0
≤0, ∀ r if ∞> Rc ≥R and vt≤0
≤0, ∀ r if − ∞< Rc ≤0 andvt≥0
≥0, ∀ r if − ∞< Rc ≤0 andvt≤0
≤0, for R ≥r≥Rc if 0≤Rc≤R and vt≥0
≥0, for 0≤r ≤Rc if 0≤Rc≤R and vt≥0
≥0, for R ≥r≥Rc if 0≤Rc≤R and vt≤0
≤0, for 0≤r ≤Rc if 0≤Rc≤R and vt≤0
The vector representation of various conditions are given in Figure 2.3. In the vector
diagram, ut is the fixed tangential velocity of the water across the paddle. Tangential
speed of the paddle is a function of radius at a particular position (vt(r)) and it varies
linearly from zero at the base of the paddle to the maximum value at the tip of the
paddle, ˆvt. If (ut−vt)>0 over the entire radius of the paddle, then the elementary drag
force becomes
(2.14)
dFd =
1
2ρwCd(W dr)(ut−vt) 2
= 1
2ρwCd(W dr)(u 2
t +v
2
t −2utvt)
= 1
2ρwCdW(u
2cos2θ
wec+r2θ˙wec2 −2ucosθwecrθ˙wec)dr
The elementary torque is,
dTd=
1
2ρwCdW(u
2cos2θ
wec+r2θ˙wec2 −2urθ˙weccosθwec)rdr (2.15)
The total torque can be computed as,
Td =
1
2ρwCdW Z R
0
ru2cos2θwec+r3θ˙wec2 −2ur
2θ˙
weccosθwec
dr
= 1
2ρwCdW
R2
2 u 2
cosθwec2+
R4
4 ˙
θwec2 −2R
3
3 u ˙
θweccosθwec
ut ˆ vt ut ˆ vt ut ˆ vt ut ˆ vt
(ut−vt(r))≥0 (ut−vt(r))≤0
(ut−vt(r))≤0 (ut−vt(r))≥0
Rc≥R
Rc≤0
ut ˆ vt ut ˆ vt
(ut−vt(r))≥0
0≤Rc≤R
(ut−vt(r))≤0 (ut−vt(r))≥0
(ut−vt(r))≤0
vt(r)
r
WEC
(a) (b)
(c) (d)
(e) (f)
Figure 2.3: Tangential velocity vectors at different conditions. Tangential velocity of WEC at different r, vt(r) varies from zero to ˆvt. Velocity of water, ut is uniform across
the radius.
If (ut−vt)<0 over the entire radius of the paddle, then the total torque can be computed
as,
Td=−
1
2ρwCdW
R2 2 u
2cosθ
wec2+
R4 4
˙
θ2wec− 2R
3
3 u ˙
θweccosθwec
If (ut−vt) >0 for 0 ≤ r ≤ Rc, and (ut−vt) <0 for Rc ≥ r ≥R, the total torque can
be computed as,
Td =
1
2ρwCdW
r2 2u
2
cos2θwec+
r4 4 ˙
θ2wec− 2r
3
3 u ˙
θweccosθwec
Rc
0
− 1
2ρwCdW
r2 2u
2
cos2θwec+
r4 4 ˙
θ2wec− 2r
3
3 u ˙
θweccosθwec
R
Rc
= 1
2ρwCdW
R2c
2 u 2
cos2θwec+
R4c
4 ˙
θwec2 − 2R
3
c
3 u ˙
θweccosθwec
− 1
2ρwCdW
R2 2 u
2
cos2θwec+
R4 4
˙
θ2wec− 2R
3
3 u ˙
θweccosθwec
+ 1
2ρwCdW
R2
c
2 u
2cos2θ
wec+
R4
c
4 ˙
θwec2 − 2R
3
c
3 u ˙
θweccosθwec
= 1
2ρwCdW
(2R2
c−R2)
2 u
2cos2θ
wec+
(2R4
c−R4)
4 ˙
θwec2 − (4R
3
c−2R3)
3 u
˙
θweccosθwec
(2.18)
If (ut−vt)<0 for 0≤r ≤Rc, and (ut−vt)>0 for Rc≥r≥R then the total torque is,
Td =−
1
2ρwCdW
r2 2u
2cos2θ
wec+
r4 4 ˙
θwec2 − 2r
3
3 u ˙
θweccosθwec
Rc
0
+ 1
2ρwCdW
r2 2u
2cos2θ
wec+
r4 4θ
2
wec−
2r3
3 uθweccosθwec R
Rc
=−1
2ρwCdW
R2
c
2 u
2cos2θ
wec+
R4
c
4 ˙
θwec2 − 2R
3
c
3 u ˙
θweccosθwec
+ 1
2ρwCdW
R2 2 u
2cos2θ
wec+
R4 4
˙
θwec2 − 2R
3
3 u ˙
θweccosθwec
− 1
2ρwCdW
R2c
2 u
2cos2θ
wec+
Rc4
4 ˙
θ2wec− 2R
3
c
3 u ˙
θweccosθwec
=−1
2ρwCdW
(2R2c−R2)
2 u
2cos2θ
wec+
(2R4c−R4) 4
˙
θ2wec−(4R
3
c−2R3)
3 u
˙
θweccosθwec
(2.19)
By combining all the conditions in one equation, it can be written as,
(2.20)
Td= sign
˙
θwec
1
2ρwCdW
(2Rc2−R2)
2 u
2
cos2θwec+
(2R4c−R4) 4
˙
θwec2
− (4R
3
c−2R3)
3 u
˙
θweccosθwec
where, Rc can be computed in real-time as,
Rc =
R, if Rc≥R
0, if Rc≤0
Rc, if R ≥Rc≥0
2.2.1.4 Computation of buoyancy torque, Tb
Except for the forces due to oscillatory water, buoyancy force is also applied on the
paddle. Considering the mass of the paddle as M, the buoyancy force can be given as
Fb = (V ρw−M)g (2.21)
where,g is the gravitational constant of the earth. Assuming the thickness of the paddle, D to be uniform for the entire paddle, the center of mass is located at R/2. Hence, the buoyancy torque applied on the paddle towards the reference vertical position can be
computed as,
Tb = (V ρw−M)g
R
2 sinθwec (2.22)
Note that, the buoyancy torque works against the movement of the paddle from the ver-tically upright position and assists in the motion towards the vertical reference position.
In standstill water, the buoyancy torque keeps the paddle in upright position. It can be
concluded that the buoyancy torque works as the restoring torque and hence, can be
represented as a torsional spring for the paddle. The equivalent spring constant due to
buoyancy,τwec, can be expressed as,
τwec =
(V ρw−M)gR2 sinθwec
θwec
(2.23)
Considering the movement of the paddle limited to small angle, (θwec < π/6) the
equiv-alent spring constant can be given as,
sinθwec ≈θwec, τwec ≈(V ρw−M)g
R