International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 10, October 2017)
74
An Object Recognize Skill for Robotic Arm Control Using
SVM
Rajesh L
1, Tamilarasan. K
2, Kamini E
3 Madras Institute of TechnologyAbstract - Recognizing a particular object and placing accurately in required place and very short time. Automation of placing the object plays a major role in industry. In this paper, Machine learning based Support vector machine technique is used for recognizing and classification of different shapes and objects is proposed. Robotic arm is capable of recognizing an object at accurate position, it leads a good solution for selectiong and placing the object safely, easily and quickly.
Keywords - object sorting, robotic arm, machine learning, Support Vector Machine
I. INTRODUCTION
In fast growing industrial unit needs speed in manufacturing. Some industries still using human controlled robot such as placing items, grabbing and putting items from one place to another place. For example leather industry and electroplating. When transferring those all items accuracy and safety are needed so the manufacturing robot for industrial purpose is the robotic arm. A robotic arm moves an end effector from place to place. The objective of this paper is to collect the measurement of acquisition parameters of programming based on robot skills aims to reduce the time and effort needed to set up a collaborative robot to solve a new task. The robotic arm generally move from the initial position to the determined destination. The classifier is designed to perform well with challenging object types that occur frequently in industrial settings, including metallic and colorless objects with highly re-flective surfaces. The purpose of this is to provide a ro-botic arm that sorts the objects in the most efficient way and in also cost effective manner. Technology that is expanding and is widely used at present is image pro-cessing. Image processing is basically a form of signal processing, where the input is an image which is pro-cessed to obtain some values, parameters or the set of characteristics related to that particular image.
II.
OBJECT AND SHAPE DETECTIONMachine Learning
Machine learning is a type of Artificial Intelligence (AI),the ability to learn without being explicitly programmed. It has three types of tasks are,
1) Supervised learning 2) Unsupervised learning 3) Reinforcement learning
It is one type of learning task of inferring a function from labeled training data. The training data consists of a set of training examples. it consists of an input object and a desired output value [1]. Unsupervised learning used to draw the interferences from datasets consists of input data without labeled response it is a cluster analysis method which is used for data analysis or grouping in data[2]. This is an area of machine learning inspired by dynamic environment it must perform a certain goal it provided feedback in terms of rewards as it navigates its problem space[3].
Shape Detection
Shape analysis is the mainly automatic analysis of
geometric shapes, for example using acomputer
find similarlity shaped in a object database to
automatically analyze and process geometric shapes, the objects have to be represented in a digital form.
Object Detection
Object detection is the technology that is related to image processing. It is used to detect to detect the objects such as balls, cups, vehicles, buildings and peoples. The main objective of this object detection is face detection and vehicle detection. This object detection mainly used to two types,
1) Feature extraction 2) Training classifier
Object Classification
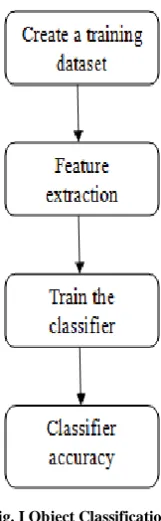
A classifier is an algorithm is used to characterize the objects and use them to determine the class of each object, such as size, speed, compactness, boundary box. supervised learning classification is used. It is one type of task a function from labeled training data. In this training data used to train the machine and get the desired output datasets. This type of learning is called supervised learning is shown Figure I.
III. DESCRIPTION
Raspberry PI And Arduino
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 10, October 2017)
75
This chip is 32 bit, 700 MHz System on a Chip which is built on the ARM11 architecture. It has Video Core IV GPU, and was originally shipped with 256 megabytes of RAM, later upgraded to 512 MB. It does not have storage drive but uses SD card for booting and long term storage.Fig. I Object Classification
An Arduino board is used to interface Raspberry Pi and the servo motor control board. Serial communication is used to send serial messages from Raspberry Pi to controller to move the Arm accordingly. There is one serial communication port available on Arduino. The other ports are implemented using software serial com-munication from which more ports for data transfer are obtained.
Robotic Arm
Robotic arm is a type of mechanical arm,
usually programmable, with similar functions to a human arm; the arm may be the sum total of the mechanism or may be part of a more complex robot. The links of such a manipulator are connected by joints
allowing either rotational motion (such as in
an articulated robot) or translational (linear)
displacement. The links of the manipulator can be considered to form a kinematic chain. The terminus of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand.
IV. ALGORITHM
Support Vector Machine
Support Vector Machine (SVM) is a supervised machine learning algorithm which can be used for both classification or regression challenges it is mostly used in classification problems. The basic SVM takes a set of input data, for each given input, which has two possible class forms the output making it a non-probabilistic binary linear classifier.
WORKING OF SVM
Support Vector Machine ( SVM ) is one of the most popular supervised binary classification algorithm. For example just imagine the feature vector was just two dimensional now have 2D points representing the two classes.
In the image above, the two classes are represented by two different kinds of dots. All black dots belong to one class and the white dots belong to the other class.During training, we provide the algorithm with many examples from the two classes. In other words, algorithm the coordinates of the 2D dots and also whether the dot is black or white.
[image:2.595.124.205.206.468.2]Different learning algorithms figure out to separate these two classes in different ways. Linear SVM tries to find the best line that separates the two classes. In the figure above, H1, H2, and H3 are three lines in this 2D space. H1 does not separate the two classes and is therefore not a good classifier. H2 and H3 both separate the two classes, but intuitively it feels like H3 is a better classifier than H2 because H3 appears to separate the two classes more cleanly. Because H2 is too close to some of the black and white dots. On the other hand, H3 is chosen such that it is at a maximum distance from members of the two classes is shown in Figure II.
[image:2.595.327.529.556.716.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 10, October 2017)
76
Advantages Of SVMa. High-dimensionality b. Memory efficiency c. Versatility
V.METHODOLOGY
Object Training
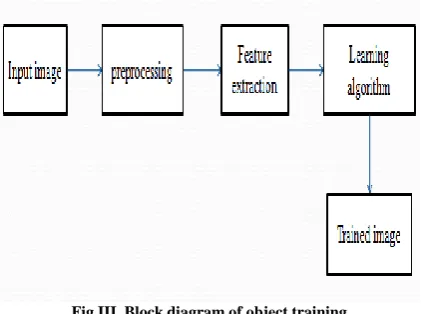
Figure III shows the block diagram of Object Training. The Object Training follows the steps given below.
Step 1: An input image is pre-processed to normalize contrast and brightness effects. A very common preprocessing step is to subtract the mean of image intensities and divide by the standard deviation
Step 2: An edge detector of an image it can be simplified. The circular shape of the buttons in these edge images can be conclude that edge detection retains the essential
information while throwing away non-essential
information. The step is called feature extraction. Eg: Histogram of Oriented Gradients (HOG),Scale-Invariant
Feature Transform(SIFT) Speeded Up Robust
[image:3.595.321.543.384.563.2]Feature(SURF) etc.,But this object classification using HOG.
Fig.III Block diagram of object training
A feature extraction algorithm converts an image of fixed size to a feature vector of fixed size.HOG is based on the idea that local object appearance can be effectively described by the distribution (histogram) of edge directions (oriented gradients)
Steps for calculating the HOG descriptor: 1) Gradient calculation
2) Cells
3) Calculate HOG in 8x8 cells 4) Block normalization 5) Feature vector
Step 3:learning algorithm for SVM
Object Testing
Sliding window classifier
A sliding window is rectangular region of fixed width and height that “slides” across an image. The sliding window function requires three arguments.
1) Image 2) Step size 3) Window size
VI. DESIGN AND IMPLEMENTATION
Materials And Methods
Block diagram of Robotic arm control and Hardware implementation of robotic arm is shown in Figures IV and V respectively. Initially the camera detects whether the object is present or not. If it senses the presence of the object than it sets raspberry pi camera ON and captures the image of the object. This captured image is saved on to the raspberry pi. The captured image is recognizes the color and shape of the object. The Raspberry pi further sends the message to Arduino using Python script and sends serial message to Arduino which is used to inter-face the Raspberry pi with the robotic arm.
[image:3.595.323.540.408.714.2]Fig.IV. Block diagram of Robotic arm control
[image:3.595.59.270.417.574.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 10, October 2017)
77
VII. RESULTS AND DISCUSSION
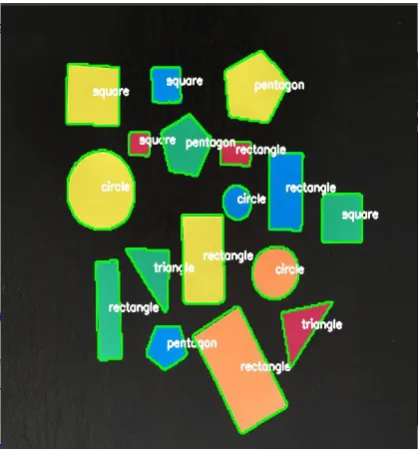
[image:4.595.59.269.264.496.2]After implementing the machine learning algorithms, Training and testing of the samples of different materials and shape detection is shown in Figures (VI- XI), the Shape detection and object detection algorithm gave accurate results almost every time. However dark shadow of the object around it can lead to wrong measurements in case of shape detection placed exactly above the ob-ject next to the camera and would glow for about 3 se-conds while taking the photo of the object
Fig. VI Result of shape detection
The time taken for object detection is 5-7 seconds so the system can sort at least 10-20 objects per minute and classify them with respect to their shape.
[image:4.595.65.263.550.749.2]
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 10, October 2017)
78
FigVII Training sample for cup and testing sample for cupThe main intension of paper is to provide a robotic arm that will sort the objects by detecting its shape and object in the appropriate boxes which can be implement-ed in industrial sorting and pick and place applications, thus providing a cost efficient system. Hence this does away with a dedicated PC for such systems, which can be implemented using Raspberry Pi. Thereby saving cost, & making robotic drive systems simpler, reliable, cheaper & easier to build.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 10, October 2017)
79
Fig.X Training sample for watch
Fig.XI Testing sample for watch
VIII.CONCLUSION
In this paper, Machine learning based SVM is used for classification of object. From observation it shows that the algorithm classify the object and the movement is accurate. This Robotic arm can be used control the object in hazardous places in very fast and easy manner.
REFERENCES
[1] M. U. Saleh et al., 2013, Design and Implementation of a Simple,
Low-Cost Robotic Arm, International Journal of Advanced Re-search in Electrical, Electronics and Instrumentation Engineering, vol. 2 Issue 10, (2013) P. 4639-4645.
[2] C. Hernández, R. Poot, L. Narváez, E. Lianes and V.Chi, 2010,
Design and Implementation of a System for Wireless Control of a Robot, International Journal of Computer Science Issues, Vol. 7, Issue 5, (2010) P. 191-197.
[3] W.Wei, Y. Pan, and K. Furuta, 2005, Internet-based tele control
system for wheeled mobile robot, IEEE,doi:10.1109/ICMA.2005.1626715,
[4] J.D. Warren, J.Adams and H.Molle, Arduino Robotics, New york,
NY:Apress, 2011
[5] Kuk-Hyun Han, Yong-Jae Kim, Jong-Hwan Kim and Steve Hsia,
Internet Control of Personal Robot between KAIST and UC Da-vis, 2000.
[6] H. Hu, L. Yu, PuiWoTsui, Quan, 2000. Internet-based Robotic
Systems for Teleoperation,” International Journal of Assembly Automation, vol. 21, No. 2, pg 1-10.
[7] Heng-Tze Cheng, Z. Sun, and P. Zhang, 2011, Real-Time
Imita-tive Robotic Arm Control for Home Robot Applications,” IEEE, Carnegie Mellon University.
[8] L. Ngai, W. S. Newman, and V. Liberatore,2002, An Experiment
in Internet- Based, Human-Assisted Robotics, IEEE, Case West-ern Reserve University, p. 1011-1015.
[9] Sun, Zehang, George Bebis, and Ronald Miller. "Object detection
using feature subset selection." Pattern recognition 37, no. 11 2165-2176.
[10] Javed, Omar, and Mubarak Shah. 2002.Tracking and object