2018 International Conference on Applied Mechanics, Mathematics, Modeling and Simulation (AMMMS 2018) ISBN: 978-1-60595-589-6
Generalized Projective Synchronization for Chaotic Systems via Active
Control with Reduced Order
Na CAI, Xue-ming PANG
and Meng LIANG
*School of Medical Imaging and Tianjin Key Laboratory of Functional Imaging, Tianjin Medical University, Tianjin 300203, PR China
Keywords: Active control technique, Reduced order, Generalized projective synchronization. Abstract. Active control is a simple and effective method to realize chaotic synchronization. The existing active control techniques often have at least one of the following limitations: (1) the design of the controller relies on the Routh-Hurwitz criterion which forces the error system to be linear; (2) the dimension of the controller must be equal to the dimension of the controlled response system, often leading to a high cost of the controller; and (3) the drive system and the response system sometimes must be identical, which limits the application in situations where synchronization between different systems is required. Therefore, in the present study, we proposed a different active control method which can overcome the above limitations at the same time. This proposed active control method is based on an asymptotic stability theorem for nonlinear systems in which an asymptotic stability can be achieved when the coefficient matrix satisfies a specific configuration. The proof of the stability theorem is given, and the corresponding numerical simulation was provided to demonstrate the realization and the validity of the proposed method.
Introduction
Chaos synchronization is an important topic in nonlinear science due to its extensive applications in many fields such as secure communication [1], complex network [2] and neural science [3]. A wide variety of synchronization phenomena have been proposed, including complete synchronization, anti-synchronization, projective synchronization, generalized synchronization, generalized projective synchronization (GPS), phase synchronization, generalized compound synchronization, fractional order synchronization, etc.
Among these different synchronization phenomena, the generalized projective synchronization has attracted a lot of attention due to some of its advantages. Because it allows an arbitrary ratio between the synchronized signals of the controlled system and the drive system with a scaling factor. The complete synchronization or anti-synchronization can also be realized using the generalized projective synchronization when the scaling factor is 1 or -1, respectively. After the first establishment of the control method to achieve generalized projective synchronization by Pecora and Carroll [4], various modified control methods have been proposed, each with its own advantages and disadvantages. These control methods include, adaptive control method [5], impulsive control method [6], and active control [7], etc.
different chaotic systems is required. Therefore, it is much needed to design a controller which (1) does not rely on the Routh-Hurwitz criterion; (2) has a low dimension to reduce the cost of the controller; and at the same time (3) can achieve generalized projective synchronization between different chaotic systems. To this end, in this paper we propose a novel reduced-order active control method which can meet the above three requirements. In this method, the stability of the error system is achieved via a coefficient matrix with a specific configuration, given by a stability theorem.
The outline of this paper is organized as follows: In Section 2, the stability theorem for nonlinear systems is given, and a reduced order active control method is further proposed based on the given stability theorem. In Section 3, the numerical simulation was performed to demonstrate the validity of the proposed method. Finally, a brief conclusion is provided to summarize the present study in Section 4.
A Reduced-Order Active Control Method
We consider the following two chaotic systems. The drive system and the controlled response system are given by
( ).
x Ax f x (1)
( ) .
yBxg y u (2)
where x[ ,x x1 2, ,xn] and y[ ,y y1 2, ,yn] are state variables; f x( ) and g y( ) are two continuous nonlinear functions; u is a controller to be designed; A and B are coefficient matrices.
Let the state errors between the drive system and the response system be e y x, where is a scaling factor. Then the error system can be described as
( ) ( ) ( ) .
eBe BAxg y f x u (3)
Definition 1[5]: For two different chaotic systems described by Eqs. (1) and (2), if there exists a control input vector u such that all trajectories ( ( ), ( ))x t y t in (1) and (2) with any initial condition
0 0
x y
( ( ), ( ))approach the manifold M { ( ), ( ) : ( )x t y t y t x t( )}as time t goes to infinity, that is
lim ( ) lim ( ) ( ) 0
t e t t y t x t (4)
Then we say that generalized projective synchronization is achieved between the systems (1) and (2).
Based on the Definition 1, we need to design a suitable u to stabilize the error system (3) at the origin. Then the generalized projective synchronization between the drive system (1) and the response system (2) can be realized.
According to the original active control method [6], the error system (3) is rewritten as the following form e(BP e) .
Then the generalized projective synchronization can be achieved using an active controller that can make the coefficient matrix BP satisfy the Hurwitz criterion, and consequently make the error system globally asymptotically stable.
Here, we propose another method to realize an asymptotically stable error system based on the following stability theorem.
Theorem 1. Consider the following nonlinear dynamic system
1 1 12 1 1
2 21 2 2 2
1 2
( ) ( )
( ) ( )
,
( ) ( )
n n
n n n n n
k c e k c e
k c e k c e
e e
k c e k c e
where e
e e1, 2, ,en
T is the state variable. If the coefficient matrix satisfies c eij( ) c eji( ) (i j)and ki 0,i 0, then the system (5) is asymptotically stable. Proof. We construct a Lyapunov function:
T 1 2 1 2 1 2 1 , , , , , , 2 n n n e e eV e e e
k k k
Then the derivative of V is given by
T 1 2 1 2 1 2 11 12 2 13 3 1 1
2
21 1 2 23 3 2
1 2 2
1 1 2 2 3 3
, , , , , , ( ) ( ) ( ) ( ) ( ) ( ) , , , ( ) ( ) ( ) n n n n n n n n n
n n n n
n
e
e e
V e e e
k k k
e c e e c e e c e e
k
c e e e c e e c e e
e e e k
c e e c e e c e e e
k 2 1
1 12 1 2 13 1 3 1 1 1
2 2
21 1 2 2 23 2 3 2 2 2
2
1 1 2 2 3 3
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) n n n n n
n n n n n n n
n e c e e e c e e e c e e e k
c e e e e c e e e c e e e k
c e e e c e e e c e e e e k 2 1 0 n i i i i e k
The V is negative definite. According to the Lyapunov asymptotical stability theory, the system (5) is asymptotically stable.
Let e y x, an asymptotically stable error system (i.e., generalized projective synchronization between the drive system (1) and the response system (2)) is realized if an active controller can be designed to make the form of the coefficient matrix of error system satisfy the above Theorem 1.
Remark. Considering the drive system (1) and the controlled response system (2), where the
coefficient matrices
ij ,n n
A a
ijn n
B b
and the nonlinear functions
T1 2
( ) ( ), ( ), , n( )
f x f x f x f x and g y( )
g y g y1( ), 2( ), ,g yn( )
T, if aik bik and ( )f xi g yi( )0,
1, 2, ,
, 1, 2, , .i n k n then the order of the active controller can be reduced.
Reduced-Order Active Controller Design for the GPS between the Pan System and the Lorenz System
We provide an example of generalized projective synchronization between two different chaotic systems (the Pan system and the Lorenz system) using the proposed active control method.
The Pan system [10] is chosen as the drive system:
1 2 1
2 1 1 3
3 1 2 3
( ),
, .
x x
x
x x x x
x x x x
(6)
where x x1, 2,x3 are the states and , , are constant. When10, 8 / 3, 16, the system (6) is chaotic.
1 2 1 1
2 1 2 1 3 2
3 1 2 3 3
)
( ,
, .
y a y y u
y cy y y y u
y y y by u
(7)
Let the error state is e ti( ) yi x ii ( 1,2,3,4) between the drive system (6) and the response system (7). Then the error system is obtained as below
1 1 2 1
2 1 2 1 2 1 3 1 3 2
3 3 1 2 1 2 3
10 10 ,
28 12 ,
8 / 3 .
e e e u
e e e x x y y x x u
e e y y x x u
(8)
The active controller is designed by
1 1
2 1 2 1 3 1 3 2
3 1 2 1 2 3
, 12
.
u v
u x x y y x x v
u y y x x v
(9)
There are various choices of the v v v1, 2, 3 to make the form of the coefficient matrix of the error system satisfy the conditions in Theorem 1. We here present one example of possible solutions that significantly reduces the complexity of the controller:
1
2 1
3
0,
38 ,
0.
v
v e
v
So that
1 1
2 2
3 3
10 10 0
10 1 0 .
0 0 8 / 3
e e
e e
e e
(10)
According to (9), the active controllers are defined by
1
2 1 2 1 3 1 3 1
3 1 2 1 2
, .
0,
12 38
u
u x x y y x x e
u y y x x
(11)
Therefore, u1 can be removed and the order of the active controller is reduced.
0 1 2 3 4 5 6 -2
-1.5 -1 -0.5 0 0.5
time(s)
e1 ,e2 ,e3
0 1 2 3 4 5 6
-15 -10 -5 0 5 10 15
time(s)
x1 ,y1
0 1 2 3 4 5 6
-20 -10 0 10 20
time(s)
x2 ,y2
0 1 2 3 4 5 6
-30 -20 -10 0 10 20 30
time(s)
x3 ,y3
x1 y1
x 2 y2 e
1 e2 e 3
x3 y3
b
d a
[image:5.595.156.435.83.287.2]c
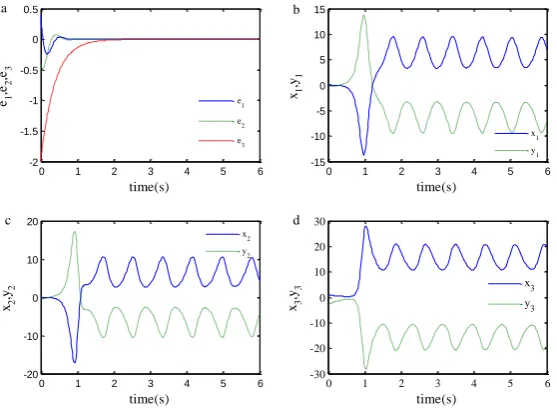
Figure 1. GPS state trajectories drive system (6) and response system (7) and the error state trajectories.
Summary
In this paper, we proposed a modified reduced-order active control method to realize the generalized projective synchronization of chaotic systems based on the stability theorem for nonlinear systems whose coefficient matrix has a specific configuration. Compared to the original active control technique, our proposed active control technique has three advantages: (1) does not rely on the Routh-Hurwitz criterion; (2) has a low dimension to reduce the cost of the controller; and (3) can achieve generalized projective synchronization between different chaotic systems. The numerical simulation results demonstrated the validity of the proposed technique in realizing the generalized projective synchronization of identical or non-identical chaotic systems.
Acknowledgement
This research was financially supported by the Natural Science Foundation of Tianjin Grant No. 15JCYBJC55100, and the Science foundation of Tianjin medical university (2015KYZQ19).
References
[1] Q. Li, S. Lu, Q. Bao, D. Chen, M. Hu, R. Zeng, G. Yang, S. Li, Simultaneous trilateral communication based on three mutually coupled chaotic semiconductor lasers with optical feedback, Appl. Opt., 57 (2018) 251-257.
[2] A.G. Soriano-Sánchez, C. Posadas-Castillo, M.A. Platas-Garza, A. Arellano-Delgado, Synchronization and FPGA realization of complex networks with fractional–order Liu chaotic oscillator, Appl. Math. Comput., 332 (2018) 250-262.
[3] T. Song, L. Pan, G. Păun, Asynchronous spiking neural P systems with local synchronization, Inform. Sciences, 219 (2013) 197-207.
[4] L. M. Pecora, T. L. Carroll, Synchronization in chaotic systems, Phys. Rev. Lett., 64 (1990) 821-824.
[6] S. Zheng, Adaptive impulsive function projective synchronization for a class of time delay chaotic systems, J. Complexity, 21 (2015) 333–341.
[7] Y. Lei, W. Xu, J. Shen, T. Fang, Global synchronization of two parametrically excited systems using active control, Chaos Soliton Fract., 28 (2006) 428-436.
[8] Z. Li, X. Zhao, J. Wang, Generalized projective synchronization of chaotic systems via modified active control, Acta Phys. Sin., 60 (2011) 050508
[9] K. S. Ojo, A. N Njah., S. T. Ogunjo, Comparison of backstepping and modified active control in projective synchronization of chaos in an extended Bonhöffer–van der Pol oscillator, Pramana, 80 (2013) 825-835.
[10]G. A. Leonov, N. V. Kuznetsov, N.A. Korzhemanova, D.V. Kusakin, Lyapunov dimension formula for the global attractor of the Lorenz system, Commun. Nonlinear Sci., 41 (2016) 84-103.