Acceleration Based Gesture Recognition for Conducting with Hidden Markov Models
Full text
Figure

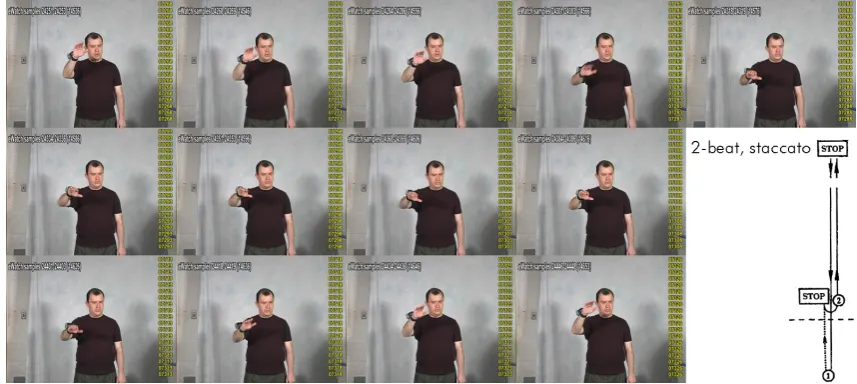
![Figure 3.1: Light-staccato conducting gestures [Rudolf, 1950]](https://thumb-us.123doks.com/thumbv2/123dok_us/7982414.757088/33.595.142.420.463.602/figure-light-staccato-conducting-gestures-rudolf.webp)


Related documents
Project Preparation Phase Completed Blueprint Phase Completed Customer Acceptance Final Preparation Phase Completed (Go-Live Readiness) Project Completed (Project
As for trade unions, the proposal is similar: creation of Occupational Health and Safety Board within the union, in order to educate employees from the aspect
"Initial payments" means payment or payments which the seller receives before or upon execution of the instrument of sale and payments which he expects or is scheduled
An example of vertical approval facilitating horizontal cooperation is a retailer settling for a somewhat lower service level to enable suppliers or LSPs to optimise the
Note: use back door Note: discussion meetings Meeting Type: Al-Anon Group Focus: Regular Language: English.. Port
Companies that suc- ceed in monetizing online access will be those that develop customers for life online—through a combination of social media, community-based mar-
When installing the Compressor Module at the rear of the planter (most often on the tongue of the planter in front of the CCS blower or Refuge tank) hydraulic oil will need to
If the study were to be repeated then employing tactics to engage the more disadvantaged and less social active members of society would be beneficial to gaining a
