2017 2nd International Conference on Software, Multimedia and Communication Engineering (SMCE 2017) ISBN: 978-1-60595-458-5
Applying Wavelet Transformation and Varied Local
Edge Patterns to Plants Classification
Xiao-meng CHEN, Yu WANG* and Li-hong CAO
School of Computer and Information Engineering, Beijing Technology and Business University, Beijing, 100048, China
*Corresponding author
Keywords: Plants recognition, Variable local edge pattern, Wavelet transformation, Block fusion, Multi-resolution.
Abstract. A method on green plants recognition based on wavelet transform and varied local edge
patterns (VLEP) is proposed in this paper. Firstly the original image is decomposed by wavelet transformation. Then texture features are extracted using VLEPs. At the same time, block-based and multi-resolution ideas are considered together to extract features after images are transformed by wavelet. Finally, the fused texture features are classified by the nearest neighbor method. The experimental results show that the proposed method is a promising method for recognizing the green plants. And combination of block-based and multi-resolution ideas can further improve the accuracy effectively.
Introduction
Texture is an important visual cue, which is common and difficult to describe, Texture feature is a kind of global feature, which needs to be calculated in the region with multiple pixels. In the pattern matching, this feature has a great of advantages. It not only can overcome the adverse effects of local bias, but also has a rotation invariance property. At the same time, it has strong resistance to noise. Therefore, texture is one of the most important features in image classification.
A lot of texture feature extraction methods have been developed in the field of computer vision and image classification. The gray level co-occurrence matrix proposed by Haralick[1]was based on estimating image's two order combined conditional probability density, and it reflects the comprehensive information on the gray image direction, adjacent interval and amplitude of variation. The fractal model proposed by Pentland[2] organically combines the spatial information and gray information of the image, which can be used to accurately express the texture features. Mallat[3] introduces the wavelet theory to the texture analysis, which can analyze the texture on the fine scale. The local binary pattern (LBP) is a very promising method proposed by Ojala[4] et al. in 2002. This method of texture analysis has some advantages such as low computational complexity, multi-scale characteristics and rotation invariant property. Since then, many new methods have been developed on the basis of LBP, such as Local binary pattern histogram fourier[5](LBP-HF), Local binary pattern variance[6](LBPV), Adaptive local binary pattern[7](ALBP), Local ternary pattern[8](LTP) and so on.
A texture analysis method on green plants recognition based on wavelet transform and varied local edge patterns[9] (VLEP) is proposed in this paper, which combines with the idea of block fusion and multi-resolution fusion so that the extracted texture features are more accurate and rich.
Wavelet Transform
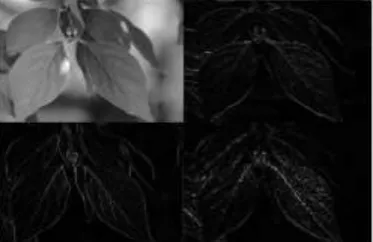
by two-dimensional wavelet decomposition, as shown in Figure 1. At each level of the transform, the image is transformed into 4 images which size is 1/4 of the original image. The specific decomposition formula is as follows:
cAj1,cHj1,cVj1,cDj1
(1) where cAj1 is the low-frequency component after decomposition, and cHj1 ,cVj1 and
1
[image:2.595.206.393.195.316.2]cDj are the high-frequency component in the horizontal, vertical and diagonal direction after decomposition respectively.
Figure 1. Green plant image after first-level wavelet decomposition.
VLEP-based Edge Feature Extraction
According to the method in the literature[9], we can extract the edge and non-edge information by
using the local edge operator VLEPP R,
with different radius R, nearest neighbor P and direction
angle . The value GP R, ( , )x y
located the position ( , )x y of the image with different direction angle can be obtained using the following equation:
, ( , ) , ( , )
P R P R
G x y VLEP I x y
(2)
For the edge VLEP operator, 2i P i/ ( 0,...,P/ 2 1) . For the non-edge VLEP operator,
2 j P j/ ( 0,...,P/ 4 1)
. I x y( , ) is the original image. The signal “” denotes convolution
operation.
The absolute values |GP R, |
including edge and non-edge information at the position ( , )x y of
the image are compared. The maximum EP R,
among all the |GP R, |
can be found using the following equation
, max(| , |)
P R P R E G
, ( ) (3)
where is a direction angle among all direction . Then the VLEP type corresponding to
the maximum EP R,
is considered as the final edge or non-edge type at the position ( , )x y of the image.
The frequency TP R,
1 1 0 0 , ( , ) M N x y P R
f x y T M N
(4) where1 if occurs ( , )
0 otherwise
f x y
, ,
, ( , )x y is the pixel position of the image I x y( , ) which is
MN pixels. Then a feature histogram HP R, including different frequencies of the different edge or non-edge types can be obtained.
1
, ( , ,..., , ,..., , )
m K
P R P R P R P R H T T T
(5)
where k denotes direction angle of VLEP, and k (1 k m), m is the number of VLEP
type.
For obtaining more compact feature vectors, feature space can be subdivided so that each type of
edge or non-edge can be more detailedly classified. The subdivision threshold values Vth for each
type of edge or non-edge are calculated using the following method.
Firstly, the values EP R,
belonging to the same edge type or non-edge (or VLEP operator) of all
the training images are ranked from the minimum to maximum. Then the threshold values Vth are
confirmed using the following equation
, ( * 1)
th P R N
V E w
B
(w1,...,B1)
(6) where N represents the number of the same type of edge or non-edge (or VLEP operator) of all the training images, B is the number of category (or bins) which each type of VLEP operator need be further divided into, and B need be set in advance. EP R, (.) denotes the value EP R, of the “th” in the queue. w is the positive integer from 1 to B1.
After the subdivision threshold values Vth are confirmed, each type of edge or non-edge can be
further divided into Bcategories according to the threshold values Vth. So the dimension number
of feature vector of each texture image can be described as
*( * ) 2 4 P P B A (7) where edge VLEP operator is P/ 2 categories, and non-edge VLEP operator is P/ 4 categories.
A is the number of non-edge VLEP operator, and its detailed information can refer to the literature [9]. If the same type of the subdivided edge or non-edge in each texture image is made statistics using the equation (4), we can obtain the more compact feature vector as follows
1 1
11 1
'
, ( , ,..., , ,... , ,... , ,..., , ,..., , )
k kB m mB
B
P R P R P R P R P R P R P R H T T T T T T
(8)
Block Fusion Idea
vector of the original image which can be expressed by the following formula:
1 2
[ , ,... N]
S s s s
(9) where N represents the number of sub blocks. s ii( 1, 2,...,N) is row vector, and it represents the histogram feature of the ith sub block.
Multi-resolution Fusion
Because the image often contains some large structural features, only using a small neighborhood texture operator is not enough to accurately express the image texture information. Therefore in this paper the idea of multi-resolution fusion with different radius R and nearest neighbor P is considered. The adjacent texture operator are not completely independent of each other, and adjacent texels may be restricted each other so that the effective area of each simple operator is slightly larger than the original neighborhood. For the same image, the information contained in texture operators of different spatial range is not completely consistent. Therefore, it is more accurate and complete to obtain the image information by using the multi-resolution fusion operator.
Classifier
The nearest neighbor classifier is a simple and effective classification criterion, which can be used to calculate the similarity and difference between two histograms. In this paper, Euclidean distance is used as a criterion, which expressed by the following formula
^ ^ ^ ^
2
1
( , ) [ ( ) ( )]
N
train test train test j
D H H H j H j
(10)
where ^
train
H and
^
test
H are the new feature statistics for training images and test images respectively, N is dimension of new feature statistics, D is Euclidean distance between two feature vectors.
Experimental Results and Analysis
Figure 2. Some examples of the green plant database.
Firstly, the original image is decomposed into 4 sub images by first-level wavelet. Then each sub image is divided into 2 blocks, as shown in Figure 3. Subsequently the VLEP operator is used to extract the texture features of each sub block. Finally the 8 spectrum features are connected in series to form a fusion spectrum feature, and used for recognition. In order to verify the influence of different resolution VLEP operators on the experimental results, the operator with ( , )P R (8,1)
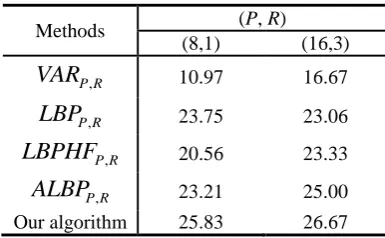
[image:5.595.200.396.455.582.2]and the operator with ( , )P R (16,3)are selected in the experiment respectively. For showing the effectiveness of the proposed algorithm, some other algorithms under the same conditions are used to carry out comparative experiments. In the following table experimental results of rotation invariant variance[4], local binary pattern[4], local binary pattern histogram fourier[5](LBP-HF), adaptive local binary pattern[6](ALBP) and the proposed algorithm in this paper are listed.
Figure 3. Block division on sub images of green plant image. Table 1. Recognition rate of contrast algorithm(%).
Methods (P, R)
(8,1) (16,3)
,
P R
VAR 10.97 16.67
,
P R
LBP 23.75 23.06
,
P R
LBPHF 20.56 23.33
,
P R
ALBP 23.21 25.00
[image:5.595.200.393.624.743.2]16.67%, 23.33%, 25.00%, which are respectively higher than the corresponding results of VAR8,1,
8,1
LBPHF , and ALBP8,1. The main reason is that the larger the nearest neighbor P is, the higher the
resolution is. Therefore, the more the direction of the extracted texture information is, the more abundant details are. Finally the recognition results are better.
Compared with these methods, the proposed algorithm obtains the best results at each single resolution. The recognition rates of operator with P=8 and operator with P=16 respectively reach 25.83% and 26.67%.
In order to prove the validity of multi-resolution fusion theory, the two spectrum features respectively extracted by the operator with ( , )P R (8,1) and the operator with ( , )P R (16,3)are connected in series to form a fusion spectrum feature, and used for recognition. Its recognition rate can reach 27.78%. The experimental results show that the proposed algorithm can be used to identify green plants under complex background. At the same time, the idea of multi-resolution fusion can further improve the recognition results. It should be noted that green plant texture classification belongs to the fine-grained category problem. This fine image classification task is more difficult, so the recognition rate is not easy to improve obviously.
Conclusion
In this paper, a method of green plant recognition based on wavelet transform and variable local edge pattern is proposed. Firstly, the image is decomposed by wavelet transform. Then the image texture features are extracted by the variable local edge pattern. At the same time, combined with the idea of block and multi resolution the recognition results are further improved. Because the variable local edge pattern has multi-scale and multi direction (multi-resolution) properties, it is possible to characterize different local spatial scale and orientation information of texture. Wavelet transform can enhance the effective information of texture primitives, prevent aliasing and reduce the interference caused by noise. The experimental results show that the method proposed in this paper can be used to effectively identify green plant species. Our future work is to further improve the model of texture feature extraction algorithm so that the accuracy of identification can further increase.
Acknowledgement
This work is supported by Natural Science Foundation of China (No. 61671028), Beijing Natural Science Foundation (No. 4162018), Beijing Talents Fund (No. 2014000026833ZK14) and the Importation and Development of High-Caliber Talents Project of Beijing Municipal Institutions (No. CIT&TCD201504010).
References
[1] Haralick R.M. Statistical and structural approaches to texture[J]. Proceedings of the IEEE.1979,67(5): 786-804.
[2] Pentland A.P. Fractal based description of natural scenes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1984, 6(6): 661-674.
[3] Mallat S.G. A theory for multiresolution signal decomposition the wavelet representation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1989, 11(7): 674-693.
[4] Ojala T, PietikaÈinen M, Mäenpää T T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(7): 971-987.
[6] Guo Z H, Zhang L, Zhang D. Rotation invariant texture classification using LBP variance (LBPV) with global matching[J]. Pattern Recognition, 2010, 43(3): 706-719.
[7] Guo Z H, Zhang L, Zhang D. Rotation invariant texture classification using Adaptive LBP with Directional Statistical Features[J]. IEEE Transactions on Image Processing, 2010, 285-288.
[8] Guo Y, Zhao G & Pietikäinen. M. Discriminative features for texture description[J], Pattern Recognition, 2012, 45(10): 3834-3843.
[9] Wang Y, Zhao Y S, Cai Q. A varied local edge pattern descriptor and its application to texture classification[J], Journal of Visual Communication and Image Representation, 2016, 15(1): 108-117.
[10] Ren S H, Chang W G, Liu X J. A scene matching algorithm based on wavelet transform and variable scale circle template fusion [J].Chinese Journal of Electronics, 2011, 39(9): 2200-2203.