Towards Episodic Memory-based Long-term Affective Interaction with
a Human-like Robot
Zerrin Kasap and Nadia Magnenat-Thalmann
Abstract— In this paper, we address the question of how to create episodic memory based long-term affective inter-actions with a human-like robot. A key challange for long-term interaction is the recall of past important events during conversation. We suggest that episodic memory is a core concept for realizing this intelligence. In this paper, we propose a model of episodic memory and integrate it with a decision making module based on a Hierarchical Task Network (HTN) planner. Plans generated by the HTN planner are executed by a Finite-state-machine (FSM) based dialogue system in order to produce appropriate responses. Finally, we present a prototype implementation demonstrating the preliminary results we obtained.
I. INTRODUCTION
Long-term interaction with social robots and intelligent virtual characters has recently attracted human-robot and intelligent agent researchers. These agents increasingly be-come a part of our daily lives as companions, advisors or assistants. It is therefore it is essential that they can interact with us multiple times and over a long period of time. They should furthermore have the ability to maintain engaging interpersonal relationships. Until now, little research has gone into the modeling and evaluation of long-term interactions. One of the first attempts to develop a robot interacting over a long period of time was Valerie the Roboceptionist [23]. Bickmore et al. [25] introduced the term “relational agents” and constructed a health advisor agent with social-emotional and long-term relationship-building skills. Recently, Leite et al. [13] studied the role of social presence in long-term interaction with the iCat chess player robot.
Research on long-term interaction so far spent little ef-fort on behaviours such as remembering individuals, their names and more importantly remembering important past exchanges. Our ongoing research for realizing long-term affective interactions with a human-like robot called Eva, involves not only modeling of emotions, social relationships and expressive behaviour but also episodic memory. Eva teaches introductory “computer networks” concepts to users and interacts using natural language and facial expressions. A key challenge for long-term interaction is the recall of past important events during current conversation. Therefore, Eva needs to remember past emotional interactions and her relationship with users, as well as their level of success in terms of her pedagogical goals. Eva is both driven by her Zerrin Kasap is with MIRALab, University of Geneva, Switzerland
Nadia Magnenat-Thalmann is with MIRALab, Uni-versity of Geneva, and Nanyang Technological Uni-versity, Singapore [email protected] and
goals and her affective state, finding a compromise between the two. Episodic memory is a core concept to realize this intelligence, because once it is constructed it can be used to create several capabilities that are necessary for creating a sense of self and a sense of others. Episodic memory stores information related with past events, as well as adds the perspective of the robot to the selection of these events by storing important and emotionally salient events. In addition, it preserves the temporal labels of each event for future referencing. In this paper, we investigate how to model episodic memory in a way that supports long-term interaction based on pedagogical goals and social relationships. We show that goals of the robot can be represented with a HTN that generates an active plan based on the belief state derived from past knowledge in both short-term and long-term episodic memory. Plans are realized at the natural language level using a FSM-based dialogue manager.
The paper is organized as follows: in the next section, we first discuss the related background work on episodic memory and mention existing models of episodic memory for virtual characters and robots. We then introduce rele-vant work on decision making mechanisms for intelligent characters. In section III, we propose an episodic memory based long-term affective interaction system. We first present an implementation architecture for long-term interaction and beriefly mention about each component in the architecture. Following that, we present the episodic memory model focusing on encoding, storage and retrieval steps of the memory process. Then, we show that episodic memory can be integrated with a goal-based decision making system for the purpose of generating appropriate responses based on past knowledge. Finally, we present our prelimanary results with a demonstation and discussion of interaction between Eva and multiple users using a teaching scenario.
II. RELATEDWORK
An early model of episodic memory was proposed by Endel Tulving over three decades ago [12]. Later, Schank [7] introduced dynamic memory and proposed various memory structures such as scripts, scenes and memory organization packets. In the field of AI, there have been efforts to create generic episodic memory architectures [2][10]. Since the topic of episodic memory has only recently become a topic of interest for the AI community, the creation of life-long characters with the capability of long-term interaction is still a challenging topic. An early example is the pedagogical training agent Steve [14]. Ho et al. [5] developed autobio-graphic agents with story-telling capabilities and Brom et 19th IEEE International Symposium on Robot and
Human Interactive Communication
al. [4] designed episodic memory agents for role-playing games. While Ho et al. consider the affective aspects of memory, Brom et al. focus mainly on how events can be organized around different timing information. In addition to virtual characters, there also exist some examples of robots with episodic memory which combines sensory information and natural language [26] [20]. Recently, Ho et al. [6] proposed an initial memory module for virtual and robot companions supporting migration and long-term interaction. Sarah the FaceBot [19] aims to create long-term social relationships with human friends using interaction history in FaceBook. For dynamic response generation based on the emotional state, memory and motivations, goal-based decision making systems are widely used. Goal-based agents have a description of what is desirable and combine this with their perception in order to choose actions that achieve the goals. Conversational lifestyle agent Nabaztag [8] integrates dialogue and planning using HTN (Hierarchical Task Net-work) planning algorithm. In [9], discourse is generated dy-namically by combining FSMs with HTN planning in order generate dialogue for non-player characters. Belief-Desire-Intention (BDI) architectures are also widely used goal-based architectures. Harbers et al. [16] investigate the possibility of self-explaining agents in virtual training systems using a BDI approach and using HTN representation of the tasks.
While designing our episodic memory, we are inspired by the work mentioned above. Since our work is mainly focused on social and emotional aspects during dialogue, our work is closely related to [14], [5], [4] and [19]. However our model has two significant novelties: first, the structure of the episodic memory can support several functionalities such as planning and creating explanations, which are both necessary for a term interaction system. Second, long-term emotional changes are taken into account in long-terms of relationship level and have an effect on long-term dialogue planning.
III. EPISODICMEMORY-BASEDLONG-TERMAFFECTIVE INTERACTION
A. General Architecture
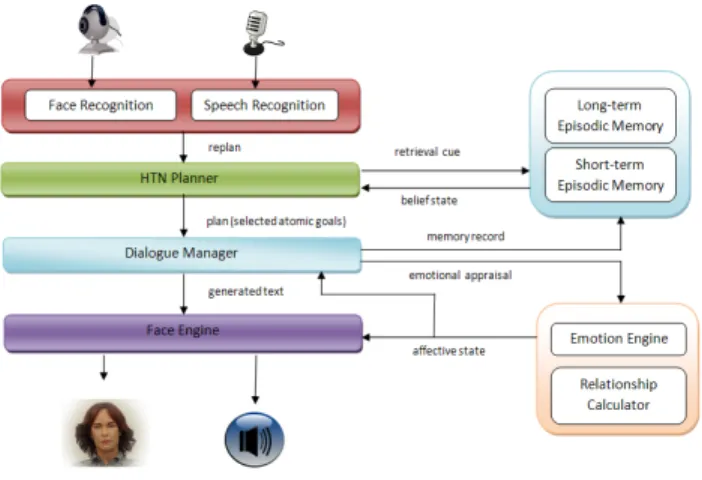
In this section, we present the implementation architecture for emotion and memory based long-term interaction (Fig. 1). Modules in this architecture communicate via a central Communication Server1. A prerequisite for long-term inter-action is the recognition of individuals and their names in order to associate events to the related user. For this purpose, we have integrated a Face Recognition2 component to the architecture. The Face Recognition module automatically recognizes users at each interaction session and remember their names in the following interactions.
Face and Speech Recognition3 components send replan messages to theHTN Plannerand the HTN planner triggers 1Orca Communication Server, http://www.ics.forth.gr/
xm-palt/research/orca/
2NeuroTechnology VeriLook 4.0 face recognition software
3Currently, our system uses text-based dialogue input instead of speech
recognition
Fig. 1. Interaction Architecture
short-term or long-term memory retrieval (using retrieval cues) in order to obtain the currentbelief statefromEpisodic Memory. The HTN planner produces a plan based on the belief state derived from past exchanges in episodic memory. Generated plans consisting ofatomic goalsare executed by a FSM-basedDialogue Manager (DAM)[1] where each atomic goal is associated with a FSM. As an output DAM generates the text to be spoken by the robot. At each FSM state change, the DAM creates a memory record and sends it to memory. While creating this memory record, DAM considers information such as time and emotional state of the event. Emotional state is produced in theEmotion Enginemodule and contains the emotion label and emotion intensity.
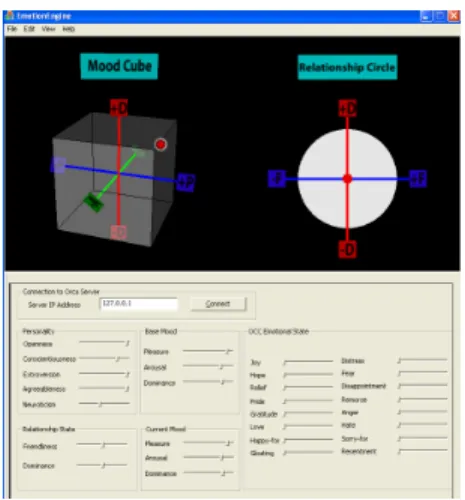
Here, we briefly discuss emotion and relationship com-ponents for a better understanding of the work described in this paper (for more details, we consult [27]). Emotional appraisal of events is handled in the DAM using condition-action rules in FSMs. DAM sends appraisal vectors to the Emotion Engine and Relationship Calculator modules in order to update emotion, mood and relationship. In return, it receives the updated emotional state from the Emotion Engine in order to choose the appropriate re-sponse. For personality and emotion simulation, we have developed an emotion model based on OCEAN (openness, conscientiousness, extraversion, agreeableness, neuroticism) personality [17] and OCC emotional appraisal model [21]. In our emotion model, we consider sixteen emotions from OCC, eight being positive (joy, hope, relief, pride, gratitude, love, happy-for, gloating) and eight being negative (distress, fear, disappointment, remorse, anger, sorry-for, resentment). Mood is based on the PAD temperament model of Mehrabian [18]. Three traits in this model are pleasure (P), arousal (A), and dominance (D) which are independent from each other forming a three dimensional space. As a relationship model, we use Argyle’s model [3] based on two dimensions: friendliness and dominance. Friendliness has an effect on the pleasure dimension of the mood. For example, if the robot meets someone friendly, the pleasure level increases. Friendliness also affects the emotional appraisal process, e.g. if the user says something bad happened to him/her
and the robot has a friendly relationship with the user, the resulting emotion becomes sorry-for. On the other hand, the dominance dimension of relationship has an effect on the dominance dimension of the mood. In other words, meeting a dominant user, the dominance dimension in the PAD model decreases and robot becomes less dominant. Fig. 2 shows a screenshot of the Emotion Engine module including the above mentioned concepts.
Fig. 2. Emotion Engine modeling personality, mood, emotions and relationship
The Face Engine converts text into speech using TTS software4and generates the facial animation. We animate the robotic head using a MPEG-4 FAPs-based (Facial Animation Parameters) facial animation engine [24]. The animations are first applied and tested on a virtual face and converted to robot animation using a MPEG-4 FAP to robot conversion algorithm that we have developed. For our research, we use a robotic head developed by Hanson Robotics5 with a realistic looking skin and 32 degrees of freedom representing the major 48 muscle actions of the human face. Facial animation is generated based on emotional state and mood coming from the Emotion Engine. The emotional state contains one of the sixteen emotions from the OCC model and converted to three static expressions for visualization (Fig. 3). In order to add more variation to the expressive behaviour, we also model eye blinking and gaze behaviour based on the arousal and dominance dimensions of the current mood.
Fig. 3. Emotional Expressions
B. An Initial Episodic Memory Model
In this section, we propose a model of episodic memory taking into account existing memory models and keeping in
4AT&T text-to-speech software 5http://www.hansonrobotics.com/
mind that we will use episodic memory for long-term plan-ning and for creating explanations based on past exchanges. A common aspect of most computational models of memory is the organization of memory elements (events) around a specific goal [7] [2] [10]. In our model, we use the three dimensions of episodic memory proposed by Tecuci et al. [10] and represent episodes in terms of context, contents and outcome:
• Context - involves the initial state at the beginning of the episode and the desired state (goal) to be achieved after the execution of episode.
• Contents- events that happens during an episode
• Outcome- is the result of the episode, indicates if the desired goal was achieved or violated
Even though their episodic memory model was not specif-ically designed for intelligent conversational agents, this description of memory fits in our system very well. In our system, goal information in the context dimension of each episode originates from the goal-based planner (HTN planner). Episodic memory stores two type of goals: high-level goals and atomic goals. High-high-level goals take place at the first layer of the HTN after the root and are stored in the context section of the episode. Atomic goals are leaf nodes at the bottom layer of the HTN. They are part of the event definitions as we describe below in the encoding section. Initial state and outcome are belief states composed of predicates and variables. The system starts with an initial belief state and the outcome belief state is derived from the events happening during an episode. When a new episode starts, the outcome from the previous episode becomes the initial state of the new episode. The episodic memory process is composed of three stages: encoding, storage and retrieval [2] [10].
1) Encoding
• When will a new episode be recorded in the episodic memory?- A new episode starts whenever there is a change in the high-level goals of the robot. During an episode, events captured through face and speech recognition components are stored in memory. Episodes are first saved into short-term episodic memory (STEM). When an interaction session ends, episodes are moved to long-term episodic memory (LTEM) selecting only important and emotionally salient events from the STEM. These are events that indicate an achievement or violation of an atomic goal and/or that has emotional impact on the robot. After an interaction session ends, episodes in the STEM are deleted.
• What kind of information needs to be stored? -Episodic memory stores the important pieces of information related to the robot’s current state and that could be important for the retrieval time. For each event, we record seven items: (1) time of the event (2) user name (3) atomic goal of the robot during this event (4) state that results after this event (5) goal status; whether an atomic goal is
achieved or violated (6) emotional state and (7) emotion intensity (Fig. 4).
2) Storage
• What should the structure of Episodic Memory be? - The structure of the episodic memory should allow it to store a large numbers of episodes and retrieval performance should not decrease with the increase in the number of episodes [10]. Relational databases are good candidates for implementing episodic memory because of their efficient storage and retrieval capability. In this study, we have used SQLite and manipulated the database using SQL queries.
• How will stored information be maintained as time
passes? - Human memory works in a way that newer memories are remembered more preventing the recall of older experiences [12]. In order to support, efficiency and scalability, forgetting functions can be applied to the episodes (e.g. functional decay theory [11] and power law of forgetting [15]). In our model, we have applied a memory decay only for the emotional events that affect the relationship dimensions friendliness and dominance by the way of adding a recall probability to each event [27]:
Pi∈[0,1], t≥0, A∈[0,1], N∈[−1,1],
A= (N+ 1)/2andPi=
if A >0 e−t/A
else 0
Here,Pi is the recall probability of episodei and
t is the time passed since this event happened. The variableAis calculated using the personality factor neuroticismN, based on the fact that mood has an effect on memory retrieval and people have the tendency to remember bad things when they are in a bad mood [22]. For other events that do not have an effect on the friendliness and dominance dimensions of the relationship model, a decay function was not essentional for our current set-up of application.
3) Retrieval
• What triggers the memory retrieval? - Retrieval can occur in two ways: spontaneous and deliberate [2] (or automatic and voluntary as mentioned by Tecuci [10]). Spontaneous retrieval occurs in cases where there are emotionally salient events that are related to the current situation. For example, if the robot and the user had highly emotional exchanges before that impact their relationship, spontaneus retrieval of those events occur as soon as Eva recognizes this person. Deliberate retrieval is performed to achieve a task or upon request by the user, e.g. in case the robot needs to talk about the users success level or needs to plan the content of the course.
• What information is retrieved and how it is used? - As a result of the retrieval process, a set of related records are returned from the episodic memory and this data is used to create belief states using domain dependent or domain-independent “belief constructors”, e.g. a relationship construc-tor is a domain-independent belief construcconstruc-tor and success-level contructor is a domain dependent belief constructor. The logical statements (e.g. relationship-status friendly, success-level medium) produced by these belief constructors are sent to the HTN planner and used for the planning.
Fig. 4. Context, content and outcome from two example episodes
C. Memory-based planning using Hierarchical Task Net-work Planner
In order to incorporate past knowledge in the episodic memory for the decision making process, a planning system is required which can represent goals of the robot and apply changes in the current plan whenever it is necessary. HTNs are well established methods for the representation of high-level cognitive tasks by the decomposition of the goals into a hierarchical structure. In HTN planning, the system starts with an initial state of the world and a high-level description of the goal and then apply action decompositions in order to recursively decompose goals into subgoals. Planning con-tinues until the planner reaches atomic goals which are not decomposable anymore.
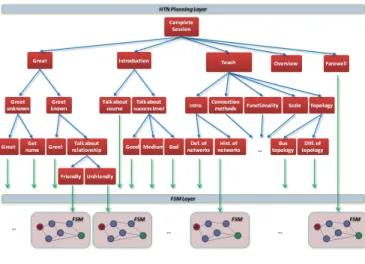
In this study, we use the JSHOP26 HTN planner in order to represent the domain goals of our teaching robot. In our case, global goal is completing an interaction session with the user. At the first level, the hierarchical tree contains the main phases in a session such as greeting, introduction, teaching, overview and farewell (Fig. 5). Belief states derived from knowledge in episodic memory is used to create an initial state for the HTN planner. Given the initial state and the goal of completing a teaching session, planner generates an initial plan. For example, in case of a first interaction
with an unknown user, the planner generates a plan with two operators: “greeting”and “get name”. In order to run these two operators, the DAM loads two FSMs related to these atomic goals. Each FSM models the possible events coming from the user and possible actions of the robot related with that task which are defined in terms of conditions and actions. Whenever the robot remembers the user, “talk-about-relationship” and “talk-about-success-level” goals are selected. In order to talk about the relationship, episodes with emotionally salient events related to relationship (events with emotion gratitude and anger) are retrieved and these data are used to create a belief state about the relationship between the robot and user. In case of retrieving multiple emotional episodes, most recent ones are considered for the planning. For talking about success level, episodes related with correct/incorrect answers of the current user are derived. If all questions are answered correctly, the user is considered as successful. If correct answers are greater than incorrect answers, the user is considered to be at medium level and finally, if the incorrect answers are greater, the success level is considered as bad. Memory is also used for the selection of the questions under “teach” high-level goal and in this case belief state contains information about whether a question is asked before or not, e.g.“was-asked question-definition-of-computer-networks”.
Fig. 5. HTN and FSM layers of interaction
IV. PRELIMINARY RESULTS ANDDISCUSSION In this section, we present a prototype implementation to illustrate the use of the proposed episodic memory for long-term interaction with a teaching robot Eva (Fig. 6). Eva is designed to teach introductory “computer networks” concepts to bachelor level students. She asks questions about each concept and whenever the user makes a mistake, she explains why the given answer is wrong and gives the correct answer. There are twenty-five questions defined currently and Eva continues teaching until all questions are finished. At each session, a user can answer as many question as he/she wants and remaining questions are considered for
the next interactions. When the user makes a mistakes, Eva encourages the user using motivating phrases. In addition, Eva has a personality and is emotionally sensitive to the user’s critics/compliments and adherence to the course. For example, if the user doesn’t follow Eva’s instructions or does not like the way she is teaching, Eva can get disappointed or get angry.
Fig. 6. Eva interacting with user
Description of the prototype is presented in a demonstra-tion video accompanying this paper. In the demonstrademonstra-tion, two users (Zerrin and Cagla) interact with Eva two times. In the first interactions, Eva collects information about the users, e.g. names, their evaluation of the “computer net-works” course. Eva then starts teaching by asking multiple choice questions about computer networks and keeps track of the users’ correct and incorrect answers. Finally Eva asks if a user liked interacting with her in the current session. This is a question that contributes to the construction of relationship because the user’s critics and comments affect her attitudes towards users. In the demonstration, while Zerrin behaves as a friendly and successful user, Cagla is rather unfriendly and thus less successful. In the first interaction, Zerrin answers all questions correctly and tells Eva that she liked interacting with her and found the course useful. When Zerrin meets with Eva the second time, Eva remembers her name, greets her and tell that she is happy to see her remembering her friendly attitude. Eva also remembers that Zerrin answered all questions correctly and reveals this by congratulating her. In the second interaction, Zerrin keeps behaving in a positive way. On the other hand, in the first interaction, Cagla pretends as if she does not like the course and makes mistakes when Eva asks questions. At the end of the session, she criticizes Eva and tells that it was boring interacting with her. Eva gets angry with Cagla. In the second session with Cagla, as soon as Eva meets her, she remembers that Cagla was unfriendly and she responds in a way that reveals her resentment. Then she also remembers that Cagla was not successful previously and warns her about her success level. This time Cagla gives some correct answers and behaves more positively.
The purpose of the remembering effect in this scenario is to create a feeling of intelligence in order to keep the users attention for long periods of time by making the robot more interesting to interact with. Our scenario shows that, the system and memory component that we have developed are a first step in realizing such kind of long-term interaction. In order to show Eva’s reactions to different user types, we designed her with emotional extremeties that normally
shouldn’t exist in a teacher. To make this system much more interesting in long-term use, topics should be extended and more events should be remembered from the previous ex-changes. Remembered facts such as relationship and success level can also be used to make a change in the teaching behaviour by making it more presciptive or permissive.
V. CONCLUSION ANDFUTUREWORK
In this paper, we presented an episodic memory model for our ongoing research on long-term affective interaction with a teaching robot. We have shown that the goals of the robot can be represented with a HTN that generates an active plan based on the belief state derived from past knowledge in both short and long-term episodic memory. Plans are realized at the natural language level using a FSM-based dialogue manager. We also designed a prototype implementation in order to present the preliminary results we obtained that shows the contribution of episodic memory to the interaction. As a future work, we would like to address the following issues related to the memory model. In this paper we used knowledge in episodic memory for the planning of dialogue using belief states. Besides planning, episodic memory can be used to create explanations based on past experience by the generalization of events based on time information. In other words, Eva can talk about her past intentions and whether her goals was achieved or not by referring to time, e.g. “Yesterday, I was planning to teach you about network hardware, however since you had diffuculty in other topics, we did a review. Today, we will continue with network hard-ware”. Currently, we are also planning extensive evaluation of our system in order to measure the contribution of memory to the feeling of intelligence in a long-term experiment with bachelor level students.
Finally, we would like to mention that, even though we have chosen a teaching scenario in our current implemen-tation, the proposed method has the potential to be used for the creation of long-term intelligence in other domains such as everyday use of robots as assistants or in health care for children and elderly people. In the future, we will also explore other applications areas that can benefit from our model.
VI. ACKNOWLEDGEMENT
This study is partly funded by the EU Project 3DLife (IST-FP7 247688). We would like to thank Nedjma Cadi-Yazli for the preparation of the demonstration video.
REFERENCES
[1] Egges A., Zhang X., Kshirsagar S., and Magnenat-Thalmann N. Emotional communication with virtual humans. pages 243–263, 2003. [2] Nuxoll A. Enhancing Intelligent Agents with Episodic Memory. PhD
thesis, The University of Michigan, 2007.
[3] M. Argyle. Bodily communication.Cecond ed. Methuen and Co Ltd, 1998.
[4] Brom C. and Lukavsky J. Towards virtual characters with a full episodic memory II: The episodic memory strikes back. In Proc. Empathic Agents, AAMAS workshop, pages 1–9, 2009.
[5] Ho W. C. and Dautenhahn K. Towards a narrative mind: Creating coherent life stories for believable agents. InProceeding of Intelligent Virtual Agent (IVA), pages 59–72, 2008.
[6] Ho W. C., Lim M. Y., Vargas P. A., Enz S., Dautenhahn K., and Aylett R. An initial memory model for virtual and robot companions supporting migration and long-term interaction. In Proceedings of RO-MAN 2009, pages 277–284, 2009.
[7] Schank R. C. and Abelson R. P. Scripts, Plans, Goals and Under-standing: an Inquiry into Human Knowledge Structures. L. Erlbaum, 1977.
[8] Smith C., Cavazza M., Charlton D.and Zhang L., Turunen M., and Hakulinen J. Integrating planning and dialogue in a lifestyle agent. In 8th International Conference on Intelligent Virtual Agents, 2008. [9] Strong C.R. and Mateas M. Talking with NPCs: Towards dynamic
generation of discourse structures. InProceedings of the Fourth Ar-tificial Intelligence and Interactive Digital Entertainment Conference, 2008.
[10] Tecuci D. and B. Porter. A generic memory module for events. In Proceedings to the 20th Florida Artificial Intelligence Research Society Conference (FLAIRS), 2007.
[11] Altmann E. and Gray W. Managing attention by preparing to forget. Human Factors and Ergonomics Society Annual Meeting Proceedings, Cognitive Ergonomics, 1(4):152–155, 2000.
[12] Tulving E. Episodic and semantic memory. Inin Organization of Memory, E. Tulving and W. Donaldson, Eds. New York: Academic Press, 1972.
[13] Leite I., Martinho C., Pereira A., and Paiva A. As time goes by: Long-term evaluation of social presence in robotic companions. In 18th IEEE International Symposium on Robot and Human Interactive Communication, RO-MAN, 2009.
[14] Rickel J. and Johnson W.L. Animated agents for procedural training in virtual reality: Perception, cognition, and motor control. Applied Artificial Intelligence, 13(4-5):343–382, 1999.
[15] Wixted J.T. Analyzing the empirical course of forgetting. Journal of Experimental Psychology: Learning, Memory and Cognition, 16:927– 935, 1990.
[16] Harbers M., van den Bosch K., and Meyer J.J. A methodology for developing self-explaining agents for virtual training. In Proc. of 2nd Multi-Agent Logics, Languages, and Organisations Federated Workshops(MALLOW’009), Turin, Italy, 2009.
[17] R. R. Mccrae and P.O. John. An introduction to the five-factor model and its applications.Journal of Personality, 60:175–215, 1992. [18] A. Mehrabian. Pleasure-arousal-dominance: A general framework
for describing and measuring individual differences in temperament. Current Psychology, 14:261–292, 1996.
[19] Mavridis N. and Datta C. Facebots: Social robots utilizing and publishing social informatio on facebook. InIEEE HRI 2009, 2010. [20] Mavridis N. and Petychakis M. Human-like memory systems for
interactive robots: Desiderata and two case studies utilizing grounded situation models and online social networking. InAISB 2010, 2010. [21] A. Ortony, G. L. Clore, and A. Collins. The cognitive structure of
emotions. 1988.
[22] Lewis P.A. and Critchley H.D. Mood-dependent memory. Trends in Cognitive Sciences, 17(10):431433, 2003.
[23] Gockley R. Designing robots for long-term social interaction. In IEEE/RSJ International Conference on Intelligent Robots and Systems, 2005.
[24] Garchery S., Egges A., and Magnenat-Thalmann N. Fast facial animation design for emotional virtual humans. InProc. Measuring Behaviour,.
[25] Bickmore T. and Picard R. Establishing and maintaining long-term human-computer relationships. ACM Transactions on Computer-Human Interaction, 12:293–327, 2005.
[26] Dodd W. and Gutierrez R. The role of episodic memory and emotion in a cognitive robot. InIEEE International Workshop on Robot and Human Interactive Communication, RO-MAN, pages 692–697, 2005. [27] Kasap Z., Ben Moussa M., Chaudhuri P., and Magnenat-Thalmann N. Making them remember - emotional virtual characters with memory. IEEE Computer Graphics and Applications, 29(2):20–29, 2009.