Design of Hybrid Fuzzy Neural Network for
Function Approximation
Amit Mishra1*, Zaheeruddin1
1Jamia Millia Islamia (A Central University), Department of Electrical Engineering, New Delhi, India; *Jaypee Institute of Engi-neering and Technology, Madhya Pradesh, India.
Email: amitutk@ gmail.com
Received November 21st, 2009; revised April 25th, 2010; accepted April 30th, 2010.
ABSTRACT
In this paper, a hybrid Fuzzy Neural Network (FNN) system for function approximation is presented. The proposed
FNN can handle numeric and fuzzy inputs simultaneously. The numeric inputs are fuzzified by input nodes upon pres-entation to the network while the Fuzzy rule based knowledge is translated directly into network architecture. The con-nections between input to hidden nodes represent rule antecedents and hidden to output nodes represent rule conse-quents. All the connections are represented by Gaussian fuzzy sets. The method of activation spread in the network is
based on a fuzzy mutual subsethood measure. Rule (hidden) node activations are computed as a fuzzy inner product.
For a given numeric o fuzzy input, numeric outputs are computed using volume based defuzzification. A supervised learning procedure based on gradient descent is employed to train the network. The model has been tested on two dif-ferent approximation problems: sine-cosine function approximation and Narazaki-Ralescu function and shows its natural capability of inference, function approximation, and classification.
Keywords: Cardinality, Classifier, Function Approximation, Fuzzy Neural System, Mutual Subsethood
1. Introduction
The conventional approaches to system modeling that are based on mathematical tools (i.e. differential equations) perform poorly in dealing with complex and uncertain systems. The basic reason is that, most of the time; it is very difficult to find a global function or analytical structure for a nonlinear system. In contrast, fuzzy logic provides an inference morphology that enables approxi-mate human reasoning capability to be applied in a fuzzy inference system. Therefore, a fuzzy inference system employing fuzzy logical rules can model the quantitative aspects of human knowledge and reasoning processes without employing precise quantitative analysis.
In recent past, artificial neural network has also played an important role in solving many engineering problems. Neural network has advantages such as learning, adap-tion, fault tolerance, parallelism, and generalization. Fuzzy systems utilizing the learning capability of neural net-works can successfully construct the input output map-ping for many applications. The benefits of combining fuzzy logic and neural network have been explored ex-tensively in the literature [1-3].
The term neuro-fuzzy system (also neuro-fuzzy meth-ods or models) refers to combinations of techniques from
neural networks and fuzzy system [4-8]. This never means that a neural network and a fuzzy system are used in some kind of combination, but a fuzzy system is cre-ated from data by some kind of (heuristic) learning method, motivated by learning procedures used in neural networks. The neuro-fuzzy methods are usually applied, if a fuzzy system is required to solve a problem of func-tion approximafunc-tions or special case of it, like, classifica-tion or control [9-12] and the otherwise manual design process should be supported and replaced by an auto-matic learning process.
Here, the attention has been focused on the function approximation and classification capabilities of the sub-sethood based fuzzy neural model (subsub-sethood based FNN). This model can handle simultaneous admission of fuzzy or numeric inputs along with the integration of a fuzzy mutual subsethood measure for activity propa-gation. A product aggregation operator computes the strength of firing of a rule as a fuzzy inner product and works in conjunction with volume defuzzification to generate numeric outputs. A gradient descent framework allows the model to fine tune rules with the help of nu-meric data.
model. Sections 3 and 4 demonstrate the gradient descent learning procedure and the applications of the model to the task of function approximation respectively. Finally, the Section 5 concludes the paper.
2. Architectural and Operational Detail
To develop a fuzzy neural model, following issues are important to be discussed:1) Signal transmission at input node.
2) Signal transmission method (similarity measures) from input nodes to rule nodes.
3) Method for activity aggregation at rule nodes. 4) Signal computation at output layer.
5) Learning technique and its mathematical formula-tion used in model.
The proposed architecture of subsethood based Fuzzy neural network is shown in Figure 1. Here x1 to xm and xm + 1 to xn are numeric and linguistic inputs respectively.
Each hidden node represents a rule, and input-hidden node connection represents fuzzy rule antecedents. Each hidden-output node connection represents a fuzzy rule consequent. Fuzzy set corresponding to linguistic levels of fuzzy if-then rules are defined on input and output UODs and are represented by symmetric Gaussian mem- bership functions specified by a center and spread. The center and spread of fuzzy weights wij from input nodes i
to rule nodes j are shown as cij and σij of a Gaussian
fuzzy set and denoted by wij = (cij, σij). As this model can
handle simultaneous admission of numeric as well as fuzzy inputs, Numeric inputs are first fuzzified so that all outputs transmitted from the input layer of the network are fuzzy. Now, since the antecedent weights are also fuzzy, this requires the design of a method to transmit a fuzzy signal along a fuzzy weight. In this model signal transmission along the fuzzy weight is handled by calcu-lating the mutual subsethood. A product aggregation op-erator computes the strength of firing at rule node. At output layer the signal computation is done with volume defuzzification to generate numeric outputs (y1 to yp). A
gradient descent learning technique allows the model to fine tune rules with the help of numeric data.
2.1 Signal Transmission at Input Nodes
Since input features x1, ... , xn can be either numeric and
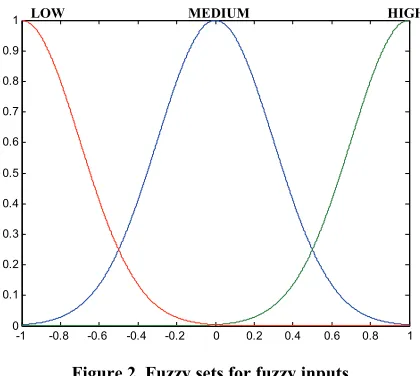
linguistic, there are two kinds of nodes in the input layer. Linguistic nodes accept a linguistic input represented by fuzzy sets with a Gaussian membership function and modeled by a center ci and spread σi. These linguistic
inputs can be drawn from pre-specified fuzzy sets as shown in Figure 2, where three Gaussian fuzzy sets have been defined on the universe of discourse (UODs) [–1, 1]. Thus, a linguistic input feature xi is represented by the
pair (ci, σi). No transformation of inputs takes place at
linguistic nodes in the input layer. They merely transmit the fuzzy input forward along antecedent weights.
x1
xi
xm
Xm+1
xn
Input Layer Rule Layer Output Layer
Numeric
nodes
Linguistic
nodes
y1
yk
yp (cij,σij)
(cnj,σnj)
(cjk,σjk)
(cqk,σqk)
Antecedent
connection
Consequent
[image:2.595.312.536.88.241.2]connection
Figure 1. Architecture of subsethood based FNN model
LOW MEDIUM HIGH
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Figure 2. Fuzzy sets for fuzzy inputs
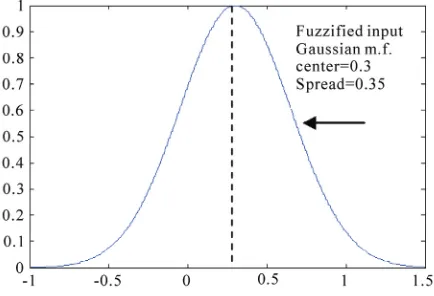
Numeric nodes accept numeric inputs and fuzzify them into Gaussian fuzzy sets. The numeric input is fuzzified by treating it as the centre of a Gaussian mem-bership function with a heuristically chosen spread. An example of this fuzzification process is shown in Figure 3, where a numeric feature value of 0.3 has been fuzzi-fied into a Gaussian membership function centered at 0.3 with spread 0.35. The Gaussian shape is chosen to match the Gaussian shape of weight fuzzy sets since this facili-tates subsethood calculations detailed in Section 2.2. Therefore, the signal from a numeric node of the input layer is represented by the pair (ci,σi). Antecedent
con-nections uniformly receive signals of the form (ci, σi).
Signals (S(xi) = (ci, σi)) are transmitted to hidden rule
nodes through fuzzy weights also of the form (cij, σij),
where single subscript notation has been adopted for the input sets and the double subscript for the weight sets.
2.2 Signal Transmission from Input to Rule Nodes (Mutual Subsethood Method)
[image:2.595.318.528.270.458.2]Figure 3. Fuzzification of numeric input
represented by Gaussian membership function, there is a need to quantify the net value of the signal transmitted along the weight by the extent of overlap between the two fuzzy sets. This is measured by their mutual
sub-sethood [13].
Consider two fuzzy sets A and B with centers c1, c2 and spreads σ1, σ2 respectively. These sets are expressed by their membership functions as:
2 1 1 (( )/ ) ( ) x c
a x e (1) 2
2 2 (( )/ ) ( ) x c
b x e (2) The cardinality C(A) of fuzzy set A is defined by
2 1 1
(( )/ )
( ) ( ) x c
C A
a x dx
e dx (3) Then the mutual subsethood ( , )A B of fuzzy sets Aand B measures the extent to which fuzzy set A equals fuzzy set B can be evaluated as:
( )
( , )
( ) ( ) ( )
C A B A B
C A C B C A B
(4)
Further detail on the mutual subsethood measure can be found in [13]. Depending upon the relative values of centers and spreads of fuzzy sets A and B, the following four different cases of nature of overlap arise:
Case 1: c1c2 having any values of σ1 and σ2.
2 .
Case 2: c1c and 12 Case 3: c1c2 and 12. Case 4: c1c2 and 12.
In case 1, the two fuzzy sets do not cross over-either one fuzzy set belongs completely to the other or two fuzzy sets are identical. In case 2, there is exactly one cross over point, whereas in cases 3 and 4, there are ex-actly two crossover points. An example of case 4 type overlap is shown in Figure 4.
To calculate the crossover points, by setting a(x) =
b(x), the two cross over points h1 and h2 yield as,
1
1 2
2 1
1 2
1
c c
h
(5)
1
1 2
2 2
1 2
1
c c
h
(6)
These values of h1 and h2 are used to calculate the mutual subsethood ( , )A B based on C A B( ), as defined in (4).
Symbolically, for a signal siS x( ) ( , )i ci i and
fuzzy weight wij ( ,cij ij), the mutual subsethood is
( )
( , )
( ) ( ) ( )
i ij
ij i ij
i ij i
C s w
s w
C s C w C s w
ij (7)
As shown in Figure 5, in the subsethood based FNN model, a fuzzy input signal is transmitted along a fuzzy weight that represents an antecedent connection. The transmitted signal is quantified ij, which denotes the
mutual subsethood between the fuzzy signal S(xi) and
[image:3.595.308.529.404.598.2]fuzzy weight ( ,cij ij) and can be computed using (4).
Figure 4. Example of overlapping: c1 > c2 and σ1 < σ2
ith input node (numeric or linguistic)
jth rule node
εij Fuzzy signal
S(Xi)
Fuzzy weight wij Mutual subsethood
Xi
The expression for cardinality can be evaluated for each of the four cases in terms of standard error function
erf(x) represented as (8).
2
0
2
( ) x t
erf x e dt
(8) The case wise expressions for are given in Appendix (1).( i ij
C s w )
2.3 Activity Aggregation at Rule Nodes (Product Operator)
The net activation zj of the rule node j is a product of all
mutual subsethoods known as the fuzzy inner product can be evaluated as
1 1
( ( ), )
n n
j ij i ij
i i
z S
x w (9) The inner product in (9) exhibits some properties: it is bounded between 0 and 1; monotonic increasing; con-tinuous and symmetric. The signal function for the rule node is linear.( )j j
S z z (10) Numeric activation values are transmitted unchanged to consequent connections.
2.4 Output Layer Signal Computation (Volume Defuzzification)
The signal of each output node is determined using stan-dard volume based centroid defuzzification [13]. The activation of the output node is yk, and Vjk's denote
con-sequent set volumes, then the general expression of de-fuzzification is
1 1
q
j jk jk
j
k q
j jk
j
z c V y
z V
(11) The volume Vjk is simply the area of consequent fuzzysets which are represented by Gaussian membership function. From (11), the output can be evaluated as
1 1
q
j jk jk
j
k q
j jk
j
z c y
z
(12) The signal of output node k is S y( )k yk.3. Supervised Learning (Gradient Descent
Algorithm)
The subsethood based linguistic network is trained by supervised learning. This involves repeated presentation of a set of input patterns drawn from the training set. The
output of the network is compared with the desired value to obtain the error, and network weights are changed on the basis of an error minimization criterion. Once the network is trained to the desired level of error, it is tested by presenting a new set of input patterns drawn from the testing set.
3.1 Update Equations for Free Parameters
Learning is incorporated into the subsethood-linguistic model using the gradient descent method. A squared er-ror criterion is used as a training performance parameter. The squared error at iteration t is computed in the standard way
t
e
2 1
1
( ( )
2
p
t t
k k
k
e d S y
t ) (13)where is the desired value at output node k, and the error evaluated over all p outputs for a specific pattern k. Both the centers and spreads
t k
d
, ,
ij jk ij
c c and jk of
antecedents and consequent connections are modified on the basis of update equations given as follows:
1 t 1
t t t
ij ij t ij
ij
e
c c c
c
(14)
where is the learning rate, is the momentum pa-rameter, and
1
t t t
ij ij ij
c c c1
(15)
3.2 Partial Derivative Evaluation
The expressions of partial derivatives required in these update equations are derived as follows:
For the error derivative with respect to consequent centers
1
( ) j jk
k
k k q
jk k jk j j jk
z y
e e d y
c y c z
(16)and the error derivative with respect to the consequent spreads
1 1
2 1
( )
( )
k
jk k jk
q q
j jk j j jk j j j jk jk
k k q
j jk j
y
e e
y
z c z z z c
d y
z
(17)
1
1
( )
p
j ij k
k
ij k j ij ij
p
j ij k
k k
k j ij ij
z y
e e
c y z c
z y
d y
z c
(18)
1 1
2 1
1 1
2 1
1
( )
q q
jk jk j j jk jk j j jk jk
k
q j
j jk
j
q q
jk j j jk j j jk jk
jk q
j jk
j
jk jk k
q
j jk
j
c z z c
y
z z
c z z c
z
c y
z
(21)
1
1
( )
p
j ij k
k
ij k j ij ij
p
j ij k
k k
k j ij ij
z y
e e
y z z y
d y
z
(19)
and and the error derivative chains with respect to input
fea-ture spread is evaluated as
1, n j
ij i i j ij z
(22)1 1
1 1
( )
q p
j ij k
j k
j k j ij i
q p
j ij k
k k
j k j ij i
z y
e e
y z z y
d y
z
(20) The expressions for antecedent connection, mutual subsethood partial derivatives ij
ij
c
and
ij
ij
are
ob-tained by differentiating (7) with respect to cij, σij and σi
as in (23), (24) and (25). where
2( ) ( )
( ) ( ) ( )
( ) ( )
i ij i ij
i ij i ij i ij
ij ij
ij
ij
i ij i ij
C s w C s w
C s w C s w
c c
c C s w
(23)
2
( ) ( )
( ( ) ( )) ( )
( ( ) ( ))
i ij i ij
ij i i ij i ij
ij ij
ij
ij ij i i ij
C s w C s w
C s w C s w
C s w
(24)
2
( ) ( )
( ( ) ( )) ( )
( ( ) ( ))
i ij i ij
ij i i ij i ij
i i
ij
i ij i i ij
C s w C s w
C s w C s w
C s w
ij
(25)
In these equations, the calculation of C s( iwij) /cij,
( i ij) /
C s w
and C s( iwij) /i are require which depends on ature of overlap o
termining or learning depends on how
fin d the n f the input fea-ture fuzzy set and weight fuzzy set. The case wise ex-pressions are demonstrated in Appendix (2).
4. Function Approximation
Function approximation involves dethe input-output relations using numeric input-output data. Conventional methods like linear regression are useful in cases where the relation being learnt, is linear or quasi-linear. For nonlinear function approximation mul-tilayer neural networks are well suited to solve the
prob-lem but with the drawback of their black box nature and heuristic decisions regarding network structure and tun-able parameters. Interpretability of learnt knowledge in conventional neural networks is a severe problem. On the other hand, function approximation by fuzzy systems employs the concept of dividing the input space into sub regions, and for each sub region a fuzzy rule is defined thus making the system interpretable.
The performance of the fuzzy system
neural network are universal function approximators and can approximate functions to any arbitrary degree of ac-curacy [13,14]. Fuzzy neural system also has capability of approximating any continuous function or modeling a system [15-17].
There are two broad applications of function ap-pr
sethood based linguistic network proposed in th
e proposed model can be oximation-prediction and interpretation. In this paper, the work has been done on applications of function ap-proximation related to prediction. In prediction, it is expected that, in future, new observations will be en-countered for which only the input values are known, and the goal is to predict a likely output value for each case. The function estimate obtained from the training data through the learning algorithm is used for this purpose.
The sub
e present paper has been tested on two different ap-proximation problem: sine-cosine function approxima-tion and Narazaki-Ralescu function [18].
4.1 Sine-Cosine Function
The learning capabilities of th
demonstrated by approximating the sine-cosine function given by
( , ) sin( ) cos( )
f x y x y (26)
for the purpose of training the networ
ameters that subsethood based FN
5, 10
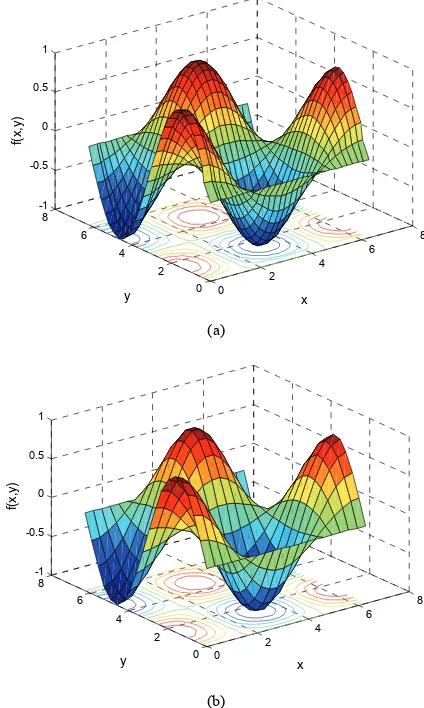
k the above func-tion was described by 900 sample points, evenly distrib-uted in a 30 × 30 grid in the input cross-space [0, 2π] × [0, 2π]. The model is tested by another set of 400 points evenly distributed in a 20 × 20 grid in the input cross-space [0, 2π] × [0, 2π]. The mesh plots of training and testing patterns are shown in Figure 6. For training of the model, the centers of fuzzy weights between the input layer and rule layer are initially randomized in the range [0, 2π] while the centers of fuzzy weights between rule layer and output layer are initially randomized in the range [–1, 1]. The spreads of all the fuzzy weights and the spreads of input feature fuzzifiers are initialized ran-domly in range [0.2, 0.9].
The number of free par
N employs is straightforward to calculate: one spread for each numeric input; a center and a spread for each antecedent and consequent connection of a rule. For this function model employs a 2-r-1 network architecture, where r is the number of rule nodes. Therefore, since each rule has two antecedents and one consequent, an
r-rule FNN system will have 6r + 2 free parameters. Model was trained for different number of rules—
, 15, 20, 30 and 50. Simulations were performed with different learning schedules given in Table 1 to study the effect of learning parameters on the performance of model.
0 2
4 6
8
0 2 4 6 8 -1 -0.5 0 0.5 1
x y
f(
x,
y)
(a)
0 2
4 6
8
0 2 4 6 8 -1 -0.5 0 0.5 1
x y
f(
x,
y)
(b)
Figure 6. (a) Mesh plot and rs of 900 training
pat-able 1. Details of different learning schedules used for
e Details
counte
terns; (b) mesh plot and counters of 400 testing
T
simulation studies
Learning Schedul
LS = 0.2 η and α are fixed to 0.2
LS = 0.1 η and α are fixed to 0.2
LS = 0.01 η and α are fixed to 0.2
LS = 0.001 η and α are fixed to 0.2
(-learning rate and -momentum)
The root mean square error, evaluated for both training and testing patterns, is given as
2
( )
training patterns trn
desired actual RMSE
number of training patterns
(27)2
( )
testing patterns test
desired actual RMSE
number of testing patterns
[image:6.595.315.527.88.442.2] [image:6.595.309.537.507.587.2]In order to visualize the surface obtained from the test set after training the function f(x, y) = sin(x) co 250 epochs the three dimensional plots of the functio ge
Function
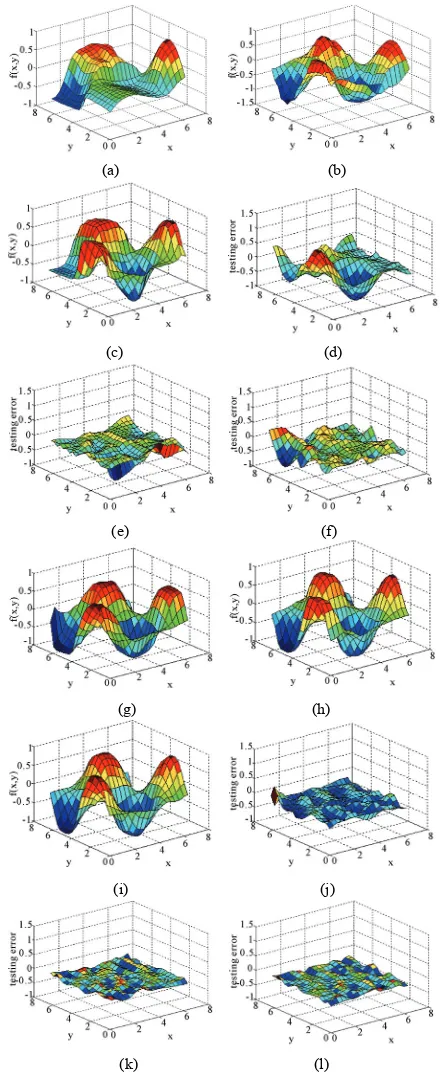
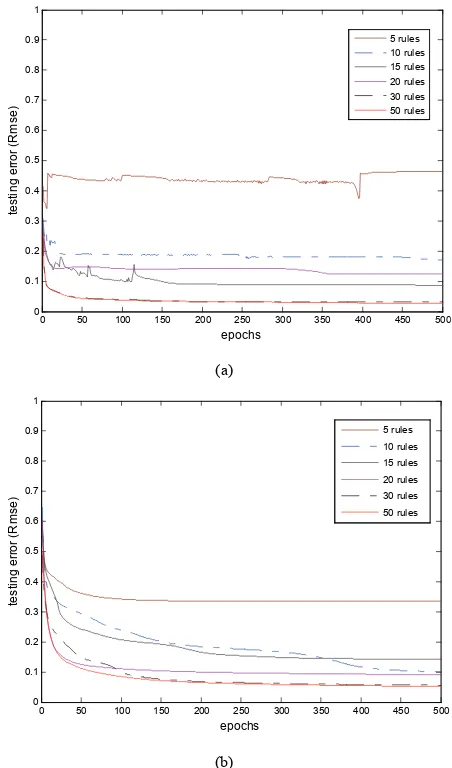
[image:7.595.311.531.85.623.2]s(y) for n is nerated. Figure 7 illustrates surface plots of the func-tion and the error surface for different values of rule counts with learning schedule as LS = 0.01. It can be observed that a model of mere 5 rules seems to be coarsely approximating the given function. The error is more where the slope of the function changes in that re-gion. Thus, increasing the number of rules generates bet-ter approximated surface as can be observed as shown in
Figure 7. As per the observation shown in Table 2, we can conclude that for learning schedule LS = 0.2 or higher and with small rule count the subsethood model is unable to train, resulting in oscillations in error trajecto-ries shown as Figure 8. This may occur due to the im-proper selection of learning parameters (learning rate (η) and momentum (α)) and number of rules. But with same learning parameters and higher rule counts like 30 and 50 rules model produces good approximation.
The observations for fuzzy neuro model drawn in the above experiments can be summarized as the following:
1) As the number of rules increases the approximation performance of model improves to a certain limit.
2) For higher learning rates and momentum with lower rule counts the model is unable to learn. In contrast if the learning rate and momentum are kept to small values a smooth decaying trajectory is obtained even for small rule counts.
3) In general, Model works fairly well even for simple learning schemes by keeping the learning rate and mo-mentum fixed to small values.
4) Most of the learning is achieved in a small number of epochs.
4.2 Narazaki and Ralescu
The function is expressed as follows,( ) 0.2 0.8( 0.7 sin(2 )), 0
y x x x x 1 (29)
Figure 9. proximating single input-output function is 1-r-1, where r is the n
mploys
training and test sets generated are and the plot of the function is shown in
The system architecture used for ap
umber of rule nodes. The tunable parameters that model e for this application is calculated to be as, one spread for one input, and a center and a spread for each antecedent and consequent connection of rule. As each rule has one antecedent and one consequent, r rule architecture will have 4r + 1 free parameters. The model is trained using 21 training patterns. These patterns were generated at intervals of 0.05 in range [0, 1]. Thus, the training pat-terns are of the form:
(0, (0)), (0.05, (0.05)), ,(1, (1))y y y (30) The evaluation was done using 101 test data taken at intervals of 0.01. The
(a) (b)
(c) (d)
(e) (f)
(g) (h)
(i) (j)
(k) (l)
Figure 7. f(x, y) surface plot and their corresponding testing
error surface after 250 epochs for different rule counts w
learning schedu ace for 5 rul ;
(b) f(x, y) surfac ce for 15 rules;
ith es le as LS = 0.01, (a) f(x, y) surf
e for 10 rules; (c) f(x, y) surfa
Table 2. Root mean square errors for different rule count and learning schedules for 250 epochs
Rules LS = 0.2 LS = 0.1
RMSEtrn RMSEtest RMSEtrn RMSE test
5 0.4306 0. 3464
10 0.1851 0.3144 0.2745 0.3239
15 0.0897 0.1125 0.1250 0.1746
30 0.0418 0.0522 0.0518 0.0615
50 0.0316 0.0323 0.0219 0.0452
Rules LS = 0.001
5928 0. 0.6210
20 0.0631 0.1518 0.0811 0.1026
LS = 0.01
RMSEtrn RMSEtest RMSEtrn RMSEtest
5 0.3352 0.3428
10 0.
15 0.
0.4080 0.3567
1758 0.1997 0.2194 0.2783
1419 0.1516 0.2771 0.2954
20 0.0972 0.1247 0.1446 0.1432
30 0.0645 0.0735 0.1135 0.1246
50 0.0336 0.0354 0.0336 0.0354
mu ly e e. T rfor indice d J2
as d ned , us val re giv w:
tual xclusiv wo pe mance s J1 an efi in [18] ed for e uation a en belo
1 1 100
21training data
J
desired output
(31)
actual output desired output
1 2 100
101test data
actual output desired output J
desired output
(32) Experiments were conducted for different rule counts, using a learning rate of 0.01 and momentum of 0.01 throughout the learning procedure. Table 3 summa th
rizes e performance of model in terms of indices J1 and J2 for rule counts 3 to 6. It is evident from the performance measures that for 5 or 6 rules the approximation accuracy is much better than that for 3 or 4 rules. In general up to a certain limit, as the number of rules grows, the perform-ance of model improves.
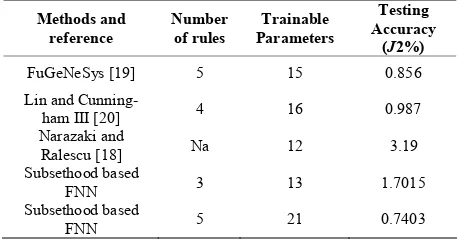
Table 4 compares the test accuracy performance index
J2 for different models along with the number of rules and tunable parameters used to achieve it. With five rules our model obtained J1 = 0.9467 and J2 = 0.7403 as better than all other schemes. From the above results, it can be infer that subsethood-based FNN shows the ability to approximate function with good accuracy in comparison with other models.
0 50 100 150 200 250 300 350 400 450 500 0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
5 rules 10 rules 15 rules 20 rules 30 rules 50 rules
epochs
test
ing er
ror
(
R
m
se)
(a)
0 50 100 150 200 250 300 350 400 450 500 0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
epochs
te
st
in
g
e
rro
r
(R
ms
e
)
5 rules 10 rules 15 rules 20 rules 30 rules 50 rules
(b)
Figure 8. Error trajectories for different rules and learning schedule (a) LS = 0.2, (b) LS = 0.01
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
x
y(
[image:8.595.57.287.110.385.2]x)
[image:8.595.314.532.518.694.2]Table 3. Subsethood based FNN performance for Na-razaki-Ralescu’s function
Number of Rules
Trainable Parameter
Training Accuracy (J1%)
Testing Accuracy
(J2%)
3 13 2.57 1.7015
4 17 1.022 0.7350
5 21 0.9468 0.7403
6 25 0.6703 0.6595
Table 4. Performance comparison of subsethood based F with other methods for Narazaki-Ralescu’s function
Methods and
reference Number of rules Parameters Trainable
Testing Accuracy
(J2%)
NN
FuGeNeSys [19] 5 15 0.856 Lin and
Cunning-ham III [20] 4 16 0.987 Narazaki and
Ralescu [18] Subsetho sed
Na 12 od ba
N Subsethood based
FNN 5 1
3.19
FN 3 13 1.7015
2 0.7403
5. C clusion
In th per the osed sub d based u-al Network model has now proved to be a universu-al
approximation problem empirically. The applications
func at iv ncl
o-main s, eco c nin
ing ing a image c pression.
work aut e conce ts of fuzzy neural function approximator in image com ssion.
REFERENCES
[1] . S. G. Lee, “Neural-Netw
Fu gic Control d Decisio stem,” I
ns-actions on Computers, Vol. 40, No. 12, 1991, pp.
1320-. R1320-. Yager and H1320-. Tahani, “Neura
sterms, Vol.
[6] S. Mitra and layer Perceptron, Inferencing and Rule EE Transactions on
Interpretability-Accuracy Representation,” IEEE
vel Online
Neu-al Networks,
, Vol. 1, No. 1, 1992, pp. 32-45.
on
s
is pa prop sethoo Fuzzy Ne r
Lin
function approximator. The model is tested on two dif-ferent applications and found suitable for any function
of [14] K. Hornik, “Approximation Capabilities of Multilayer Feed forward Networks are Universal Approximators,”
IEEE Transaction on Neural Networks, Vol. 2, No. 5,
tion approxim ion are d
nomics, ontrol, planerse and i ude the dg, foreca
of physic
st-, machine learn nd om
p In future
1989, pp. 359-366.
[15] B. Kosko, “Fuzzy Systems as Universal Approximators,”
IEEE Transactions on computers, Vol. 43, No. 11, 1994,
hors shall incorporat
pre
C. T. Lin and C
zzy Lo EEE Traork-Based
Systems, Vol. 3, No. 2, 1995, pp. 169-189.
[17] L. X. Wang and J. M. Mendel, “Generating Fuzzy Rules from Numerical Data, with Application,” Technical Re-port 169, USC SIPI, University of Southern California, Los Angeles, January 1991.
an n Sy
1336.
[2] J. M. Keller, R l Net- [18] H. Narazaki and A. L. Ralescu, “An Improved Synthesis Method for Multilayered Neural Networks Using Qualita-tive Knowledge’s,” IEEE Transactions Fuzzy Systems, Vol. 1, No. 2, 1993, pp. 125-137.
work Implementation of Fuzzy Logic,” Fuzzy Sets and
Systems, Vol. 45, No. 5, 1992, pp. 1-12.
[3] S. Horikawa, T. Furuhashi and Y. Uchikawa, “On Fuzzy Modeling Using Fuzzy Neural Networks with the Back Propagation Algorithm,” IEEE transactions on Neural
Networks, Vol. 3, No. 5, 1992, pp. 801-806.
[4] D. Nauck and R. Kruse, “A Neuro-Fuzzy Method to Learn Fuzzy Classification Rules from Data,” Fuzzy Sets
and Systems, Vol. 89, No. 3, 1997, pp. 277-288.
[5] J. S. R. Jang, “ANFIS: Adaptive-Network-Based Fuzzy Inference System,” IEEE Transactions on Sy
23, 1993, pp. 665-685.
S. K. Pal, “Fuzzy Multi Generation,” IE
Neural Networks, Vol. 6, No. 1, 1995, pp. 51-63.
[7] W. L. Tung and C. Quek, “A Mamdani-Takagi-Sugeno Based Linguistic Neural-Fuzzy Inference System for Im-proved
International Conference on Fuzzy Systems, Jeju Island,
August 2009, pp. 367-372.
[8] W. L. Tung and C. Quek, “eFSM-A No
ral-Fuzzy Semantic Memory model,” IEEE Transactions
on Neural Networks, Vol. 21, No. 1, 2010, pp. 136-157.
[9] P. K. Simpson, “Fuzzy Min-Max Neural Networks-Part 1: Classification,” IEEE Transactions on Neur
Vol. 3, No. 5, 1992, pp. 776-786.
[10] P. K. Simpson, “Fuzzy Min-Max Neural Networks-Part 2: Clustering,” IEEE Transaction on Fuzzy Systems
[11] R.-J. Wai and Z.-W. Yang, “Adaptive Fuzzy Neural Net-work Control Design via a T-S Fuzzy Model for a Robot Manipulator Including Actuator Dynamics,” IEEE
Trans-actions on System, Man and Cybernetics-Part B, Vol. 38,
No. 5, 2008, pp. 1326-1346.
[12] P. Sandeep and S. Kumar, “Subsethood Based Adaptive guistic Networks for Pattern Classification,” IEEE
Transaction on System, man and cybernetics-part C:
ap-plication and reviews, Vol. 33, No. 2, 2003, pp. 248-258.
[13] B. Kosko, “Fuzzy Engineering,” Prentice-Hall, Engle-wood Cliffs, New Jersey, 1997.
pp. 1329-1333.
[16] C. T. Lin and Y. C. Lu, “A Neural Fuzzy System with Linguistic Teaching Signals,” IEEE Transactions Fuzzy
[19] M. Russo, “FuGeNeSys-a Fuzzy Genetic Neural System for Fuzzy Modeling,” IEEE Transactions Fuzzy Systems, Vol. 6, No. 3, 1993, pp. 373-388.
[20] Y. Lin and G. A. Cunningham, “A New Approach to Fuzzy-Neural System Modeling,” IEEE Transactions
[image:9.595.57.286.246.367.2]Appendix
1. Expressions for
C s
(
i
w
ij)
The expression for cardinality can be evaluated in terms of the standard error function erf (x) given in (8). The
ij
case wise expressions for (C siwij) for all four possi-bilities identified in Section (2.2) are as follows.
Case 1—CiCij: If i , the signal fuzzy set si
d the completely belongs to weight fuzzy set , an
) the ( i C s ij w
cardinality C s( iwij)
2 (( )/ ) ( ) ( ) [ ( ) ( )] 2 i i x c
i ij i
i
C s w C s e dx
erf erf
. (33), ) if j
i
Similarly C s( iwij)C(wij i i and
( i ij) ij
C s w . If iij, the two
identical. Summarizing these three sub cases, the values of cardinality can be shown as (34).
fuzzy sets are
.
( ) ,
ij
j ij i ij
C s ( ) ( ) , ( ) , ( ) i ij
i i i ij
ij i ij
i i i
C s w
C s if
C w if
C w if
(34)
Case 2—CiCij, i ij: In this case there will be exactly one cross over point h1. Assuming , the cardinality ( valuated as
ij i
c c
)
j can be e
i i
C s w
2 2 1 1 (( )/ ) (( )/ ) 1 1 1 2 i i i h c erf ( ) 1 2ij ij i i
h x c x c
i ij h
ij i
ij
C s w e dx e dx
h c erf
(35)If cij ci, the expression for cardinality C s( iwij)
is 2 2 1 1 (( )/ ) (( )/ )
( ) h x ci i x cij ij
i ij h
C s w e dx e dx
1
1 2 i i i h c erf
1
1 2 ij i ij h c erf (36)
Case 3—CiCij, iij: In this case, there will be
two crossover points h1and h2, as calculated in (5) and
(6). Assuming h1h2 and cij i
( i ij)
C s w
c , the cardinality
can be evaluated as
1 2 2 2 1 2 2 (( )/ ) (( )/ ) (( )/ ) 1 2 1 ( ) 1 2 2 2 i i ij ij i i x c i ijh x c
h x c h i i i i i ij ij ij ij ij
C s w e dx
e dx e dx h c erf h c erf h c erf 1 1 erf h ci h
(37)if cij ci, the expression for is identical to (3
( )
C siwij
7).
Case 4—CiCij, iij: This case is similar to
case 3 and once a ere wil cross over points s calculated in (5) and (6
gain th l be two
h1 and h2, a ). Assuming h1h2,
evalu-and can be
ated as
x
x
ij i
c c, the cardinality (C siwij)
1 2
(( )/ )
( ) ji ji
h x c i ij
C s w e dx
2 2
1
(( i)/ i)
h x c
h e d
2
2
((x cij)/ i)
h e d
1
1 2 ij ij ij h c erf
2
2 i i i h c erf
1 i
i h c erf
(38)
if , the expression for is identical to (38).
Corresponding expressions for
ij i
c c C s( iwij)
(si wij)
of C s
are ob-tained by substituting the values from (34)-(38) to (7).
2. Expressions for
ij,
( i wij)
(
i ij) /
C s
w
c
ij
(
i ij) /
C s
w
and
C s
(
i
w
ij)
/
iAs per the discussion in the Section (3.2) tha
lation of ij , ij
t, the calcu-( i ij) /
C s w c
C s( iwij) / and ( i wij) / i
C s
is required in (2 25),
which de nds on the nature of fore the case w
3), (24) and (
pe overlap. There
expressions are given as followi : As
ise ng:
Case 1 — i ij is evident from (34), ( i ij)
C s w is independent from cij, and therefore,
C C
( i
C s w
(39) ) 0 ij ij c
Similarly the first derivative of (34)with respect to σij
and σi is shown as (40) and (41).
( ) ,
0,
i ij ij i ij i
ij ij i ij i
C s w if c c and
if c c and
(40)
0,
( )
,
ij i ij i
i ij
i ij i ij i
if c c and
C s w
if c c and
(41)
Case 2—CiCij, iij
( j) /cij ,
: when
val-ues of ij
ij i
c c
( i wij)
, the
i i
C s w
C s / and
( i wij) / i
C s
are derived by differentiating 5) as (3 follows : 2 1 2 1 2 )/ ) 1 2 1 (( )/ ) (( )/ ) (( )/ )
( ) ij ij
i i
ij ij
ij ij
h x c
i ij
ij ij
x c h
ij
h x c
ij
h c
C s w
e dx c c e dx c e dx c e
(42) (( 21 (( )
( i ij) h x cij
ij ij
C s w
e d 2 1 2 1 / ) (( )/ ) (( )/ ) 1 1 ij i i ij ij x c h ij h c ij ij x e dx er
h1 cij e 2 ij h c f
(43) 21 (( )/ )
( i ij) h x cij ij
i
C s w
e dx
2 1
(( i)/ i) i
x c h
i
e dx
2
)/i)
1
((
1 i h ci
i i h c e 1 1 2 i h c erf
(44)when cij ci , the values of ,
ij
( i ij) /
C s w c
ij
( i wij)/
C s
and C s( iwij)/i are derived
by differentiating (36) as follows :
2 1 2 1 2 (( )/ ) (( )/ ) ij ij ij ij x c ij x c h e d e dx 1 2 1 (( )/ ) (( )/ ) ( ) i i ij ij h
i ij x c
ij ij
h
ij
h c
C s w
e dx c c x c c e
(45) 2 1 2 1 2 1 (( )/ ) (( )/ ) (( )/ ) 1 1 ( ) 1 2 i i ij ij ij ij hi ij x c
ij ij x c h ij h c ij ij ij ij
C s w
e d e h c e h c erf x dx
(46) 21 (( )/ )
( )
i i h
i ij x c
i i
C s w
e d
x2
1
((x cij)/ ij)
h i
e d
2 1 (( )/ ) 1 i h ci i
i h c e 1 1 2 i i h c erf
(47)
Case 3—Ci Cij, iij
those of Ca ) /
i wij c
: once again, two sub
cases arise se 2. When
the values of i
similar to (
C s
ij i
c c,
ij j, (C siwij) / and
( i i)
C s wj / i
are derived by differentiating (36) as follows: 2 1 2 2 1 2 2 2 2 1 1
(( ij)/ ij) h
ij
h c
c
e
2 2 2 (( )/ ) (( )/ ) (( )/ ) (( )/ ) (( )/ ) ( ) i i ij ij i i ij ij ij ij h
i ij x c
ij ij
h x c
h ij
x c h
ij
h x c
h c
C s w
e dx c c e dx c e dx c e dx e
(48)
2 1 2 2 1 2 2 2 2 1 2 1 2 2 (( )/ ) (( )/ ) (( )/ ) (( )/ ) (( )/ ) 1 (( )/ ) 2 1 ( ) 2 i i ij ij i i ij ij ij ij ij ij hi ij x c
ij ij
h x c
h ij
x c h
ij
h x c
h ij h c ij ij h c ij ij ij ij
C s w
e d e x e dx e dx h c e h c e h c erf
dx 2 ij ij h c erf (49)
2
1 (( )/ )
( )
i i h
i ij x c
i i
C s w
e dx
2 2
1
(( ij)/ ij)
h x c
h i
e d
x 2 2((x ci)/ i)
h i e
dx 2 1 (( j)/ i)h x c
i e dx
2 ((x cj)/ i)e dx
2 h i
2 1 (( )/ ) 1 i h ci ih c
e
i 2 2 (( )/ ) 2 i h ci i
i h c e
1
12 i i h c erf
2
1 ij ij h c erf . Similarly, if (50) ij i
c c
2 1 2 2 1 2 2 2 2 1 2 2 2 1 (( )/ ) (( )/ ) (( )/ ) (( )/ ) (( )/ ) (( )/ ) ( ) i i ij ij i i ij ij ij ij ij ij h
i ij x c
ij ij
h x c
h ij
x c h
ij
h x c
h ij
h c
h c
C s w
e d c c e d c e d c e d c e e x x x x
(51)Thus for both the cases , identical expressions for
(cij ci
( i wij) / cij
or )cij ci C s
for
are
Simi-larly, the ex ij
obtained. ( i wij)
pressions C s / and ( i ij) /
C s w i
also remain same as (49) and (50) respectively in both the conditions.
Case 4—CiCij, iij
) /
j cij
: When , the val-ues of
ij i
c c
( i i
C s w
, (C siwij) /ij and
( i wij)/ i
C s
are derived by differentiating (38) as :
21 (( )/ )
( i ij) h x cij ij
ij ij
C s w
e d c c
2 2
1
(( j)/ i)
h x c
h ij
e d
c
2 1
2 2
1
2
2
2 1
2 2 (( )/ )
(( )
x
(52)
2 1 ((h cij)/ ij) e
2 2 ((h cij)/ ij) e
2 ) 1
2
1
2
2
2 1
2 1 (( )/
(( )/ )
(( )/ )
(( )/ ) 1
(( )/ ) 2
1
2
( )
2 2
ij ij
i i
ij ij
ij ij
ij ij
h x c
i ij
ij ij
h x c
h ij
x c
h ij
h c ij
ij
h c ij
ij
ij
ij
ij
C s w
e dx
e dx
e dx
h c e
h c
e
h erf
h c
erf
(53)
2
ij
c
/)
(( )/ )
(( )/ ) 1
(( )/ ) 2
2
2
( )
2
ij ij
i i
ij ij
i i
i i
h x c
i ij
i i
h x c
h i
x c h
i
h c i
i
h c
i
i
i
i
ij
ij
C s w
e dx
e dx
e dx
h c e
h c
e
h c
erf
h c
erf
(54)
If cijci , the expressions for ij ,
ij
( i ij) /
C s w c
( i wij)/
C s
and C s( iwij)/i are again the