© 2018 IJSRST | Volume 4 | Issue 5| Print ISSN: 2395-6011 | Online ISSN: 2395-602X Themed Section: Scienceand Technology
Approximating the Lifespan of Wireless Sensor Networks
Based in Mobile Nodes
A. Sandhya Rani1, Maddali M. V. M. Kumar2
1PG Student, Department of MCA, St. Ann’s College of Engineering & Technology, Chirala, Andhra Pradesh,
India
2Assistant Professor, Department of MCA, St. Ann’s College of Engineering & Technology, Chirala, Andhra
Pradesh, India
ABSTRACT
To lessen the blind zone in organize scope; we propose a scope advancement calculation of remote sensor arrange in view of portable hubs. This calculation figures the inconsistency of visually impaired zone in organize scope and acquires the base estimated numerical arrangement by using the quantitative connection between vitality utilization of related hubs and the position of the versatile hubs. In the wake of deciding the ideal relative position of the versatile hubs, the issue of visually impaired zone between the static hubs is tended to. Recreation result demonstrates that the proposed calculation has high powerful flexibility and can address the issue of visually impaired zone maximally. Other than expanding the system scope, the calculation additionally lessens the system vitality utilization; streamlines organize scope control and shows high joining. Keywords: Mobile node; Wireless Sensor Network; network coverage rate; static nodes; the blind zone
I.
INTRODUCTION
Wireless Sensor Networks arrange comprises of a substantial number of sensor hubs, which are arbitrarily sent inside a specific checking locale. The hubs team up in getting information of various natural components. Presently remote sensor organize has been generally connected in the fields of pharmaceutical, horticulture, military and natural checking. Since remote sensor systems are made out of expansive number of modest remote sensor hubs, the limited vitality has turned out to be one of the key factors that confine the execution of the system. Considering the remote sensor systems are typically conveyed in moderately poor place, harder to supplant the battery or change. Scope is an essential pointer of remote sensor organize [1-3] and enhancing scope is to lessen the visually impaired zone and excess scope, to guarantee high information transmission productivity and to drag out the administration life
inside a satisfactory scope of vitality utilization with a specific end goal to enhance the execution of WSN, and cover the prerequisites for observing region, the thickly organization is a standout amongst the most widely recognized strategy to enhance the scope rate. In any case, in this arrangement system, there are vast number of repetitive hubs, and bring some vitality utilization, for example, the information excess securing, remote channel impedance, and decline channel strife, in spite of the fact that the scope is ensured. The system hub thickness control is proposed in the commence of not influencing the system execution, joined with the present system running status, and manage some portion of the excess hubs to rest state, expect to decrease the repetition systems, lessen the system vitality utilization, and broaden the system lifetime and so forth.
WSN recognition capacity, which was utilized to portray the nature of administration. With a specific end goal to accomplish full scope of the screen territory, the most normal approach to enhance the scope rate of remote sensor organize is thick sending. In this arrangement procedure, scope rate was guaranteed, however there is observation scope crossing point between hubs in the system, which will cause a few issues, for example, data information repetition procurement, channel strife et cetera. In the interim, input-yield proportion was considered in the ecological observing, so the thick organization methodology isn't generally received when the store is lacking.
Some real accomplishments have been made in remote sensor organize scope. Nagababu et al. propose a higher most extreme stable all through than direct connection for situations with poor vitality landing rates [4], Tian et al. propose taking a break qualification lead [5], which figures the scope relations of the hubs in light of hub position or edge of landing. Be that as it may, this calculation does not think about the danger of excess scope between the hubs, prompting many covering areas of the system, requiring an excessive number of laborer hubs and causing high vitality utilization. Bulusu N used self-versatile hub organization calculation in view of radio guides [6], which repairs the voids by including radio signals. In any case, no thought was given to the cost of including radio guides and the effect on the observed condition. The writing [7] proposed a versatile hub booking calculation, the calculation utilizes the component of message going between hubs for the dynamic hub observing region data, through the versatile instrument to alter the working method of all hubs, the excess hubs in a specific timeframe, in the rest mode to diminish the system vitality costs, yet because of data procurement by that always sending messages between the hubs, make a few hubs to attempt expansive measure of work undertakings, seeming untimely "demise" wonder,
zone, which is trailed by tending to the visually impaired zones at a settled separation close to the essential hubs. This is a more mechanical technique for tending to the issue of visually impaired zones and may prompt covering of scope. This examination presents a scope streamlining calculation of remote sensor arrange in view of versatile hubs. For static hubs and dynamic modes, distinctive geometric relations between them are evaluated in light of the position of visually impaired zones and related hubs. At that point portable hubs are utilized and the versatile hub streamlining model is set up with the thought of detecting extension and leftover vitality. Daze zones are repaired by the quantitative connection between vitality utilization of related hubs and the position of the versatile hubs. With the base rough numerical arrangement got, the ideal position of portable hubs and the quantity of versatile hubs required are computed with the end goal of scope boost. This not just purposes the issue of covering identified with repairing the static voids, yet additionally diminishes the quantity of hubs and draws out the administration life.
II.
NETWORK MODEL AND PROBLEM
DESCRIPTION
A. Network model
N hubs of remote sensor systems are arbitrarily and uniformly sent inside a 2D checking territory A, which should have the accompanying properties:
(1) Probabilistic sensor display is utilized for the hubs.
(2) Node correspondence range Rc and the greatest detecting sweep of the hub has Rc!2Rm connection; any two hubs situated at a separation not as much as the correspondence span are considered neighbor hubs.
(3) The hubs are either static or portable in the system. The underlying vitality of all hubs is W and the hubs are synchronized.
(4) The exact position of the hubs in the system is known.
(5) The static hubs are associated and the issue of system availability isn't considered while enhancing system scope.
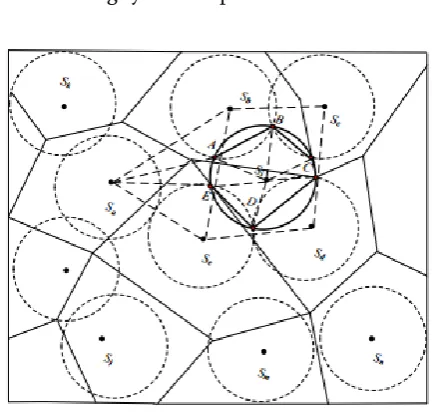
Figure 1.position of the mobile nodes
B. Problem description
Any hubs in the system can obtain the data of themselves and their neighbors. Each hub has an interesting ID and it obtains the characteristic data of the neighbor hubs amid correspondence. As said above, when Rc!2RS, the neighbor hubs are all around associated. At the point when the observing area is totally secured by the system, the system hubs must be associated, and the other way around. The visually impaired zones in the system are sporadic polygons. As appeared in the figure 1, for neighbor hubs Sa, Sb, Sc, Sd and Se, there is a visually impaired zone M. A hub set B is arranged for M for totally repairing the visually impaired zone. At that point before the repair, the zone M
organization. We propose a scope streamlining calculation of remote sensor organize in view of portable hubs. Under the commence that the visually impaired zones are known, the places of visually impaired zones and related hubs are broke down and the versatile hub enhancement demonstrate is manufactured thinking about the variables of detecting extension and remaining vitality. By evaluating the connection between vitality utilization of related hubs and position of the portable hubs, repetitive scope is tended to later and the base rough numerical arrangement is acquired. Hence, organize scope is boost in light of portable hubs.
III. COVERAGE OPTIMIZATION STRATEGY
A. Definitions
Definition 1 (related hubs in daze zone): There are a few polygonal visually impaired zones of changing size and shapes in the observing district. These visually impaired zones are not secured by any hubs of the system. At the point when the separation from the sensor hub Si to any side of the limit of the visually impaired zone is littler than 2 times the detecting range Rs, hub Si is known as the related hub of the visually impaired zone.
Definition 2 (free visually impaired zone): If zone an isn't shrouded by any hub in the system and there are no related hubs along its limits, at that point zone an is viewed as the autonomous visually impaired zone.
Definition 3 (shut visually impaired zone): If zone An isn't shrouded by any hub in the system, however there is no less than 1 related hub along its limits, at that point zone An is viewed as the shut visually impaired zone.
Definition 4 cover point Cov (i) represents that the target point i was covered, namely
"(i) is perceived strength of i, # is perception threshold. Definition 5 cover hub subset sensor hubs set S were conveyed in observing zone A, that is S {s ...s ...s} = 1i n ,D is the subset of A, Sensor hub set D S ! , if any hub in V can cover observing region D totally, V is cover hub subset of S. Definition 6 (secured zone): Consider any objective area A. On the off chance that the nearness of any point k in the objective district is detected by hub I, at that point this point is said to be secured by hub I. In the event that all hubs in the objective area are secured by hub I, at that point this locale is known as the secured zone Mi of hub I. Here the secured zone of hub I is the crossing point of secured zone Mi and the zone SA of the objective locale An or target hub k and is signified as "I.
Definition 7:( Coverage Blind zones) In any polygon, "(i) is the Coverage Blind zones of the node i .Supposing the target monitoring region $ is included in the polygon of node i , and $ is not perceived by node i . Then!( )i can be expressed as below.
Definition 8 (coverage rate): For the covered zone of node 2!Rs ! =, when and only when any node p in the monitoring region || || i s SpR ! , node p is said to be covered by Si. Coverage % is the ratio of covered zone of all operating nodes in region A to the total monitoring region.
Definition 9 coverage balance degreecoverage balance degree can reduce the network energy consumption; avoid the failure of some nodes by balance work task and energy of nodes.
neighbor nodes number of I is mi, !i is the average of the distance said between node I and k, the perceive area of node k and i were overlap.
IV. SIMULATION EXPERIMENT
Simulation experiment is completed to look at the calculation execution under the accompanying situation. For the checking area, 80 static hubs are sent with detecting span of 5-20m. The scope improvement calculation HPA in writing [7] is likewise executed for examination. The calculation proposed in this paper is named as CMN. Execution pointers are scope, arrange vitality utilization and system lifetime.
Scope rate is the most imperative execution marker of the system. For most situations, as long as the scope is kept inside a sensible range, there will be no effect on arrange accessibility. In light of the detecting range of static hubs, portable hubs are acquainted with diminish the visually impaired zones and to build the scope. As appeared in Fig. 4, at the introduction arrange, the two calculations have indistinguishable number and position of static hubs. At the early operation arrange, the scope of the two calculations changes close to nothing. Be that as it may, with more portable hubs presented, CMN calculation demonstrates a slower decay of scope as contrasted and HPA calculation. Along these lines, CMH calculation beats HPA calculation in scope and joining. Vitality utilization is another vital thought while assessing the sensor organizes execution. Since the hubs fluctuate in the measure of detecting errands, the leftover vitality and detecting extent of the hubs will be distinctive after some time. CMN calculation considers the factor of lingering vitality of the neighbor hubs in repairing the visually impaired zones. This diminishes the quantity of dead hubs, as well as the likelihood of new visually impaired zones because of no man's lands. As appeared in Fig. 5, both two calculations demonstrate an expanding pattern in
vitality utilization, yet CMN calculation has a lower vitality utilization as contrasted and HPA calculation. System lifetime is a natural execution pointer. After the system has achieved a basic purpose of scope, its execution will decay and its administration quality will decrease until the finish of system lifetime. As appeared in Fig. 6, the real system benefit nature of CMN calculation is somewhat higher than anticipated and this calculation has higher scope and more adjusted distribution of system assets than HPA calculation. CMN calculation is fit for deciding the ideal position of the versatile hubs, so the system scope and availability are enhanced inside the detecting sweep of the hubs. Thus, arrange lifetime is drawn out.
V.
CONCLUSION
VI. REFERENCES
[1]. Xing XF, Wang GJ, Li J. Polytype target coverage scheme for heterogeneous wireless sensor network using linear programming. Wireless Communications and Mobile Computing, 2014, 14(8) : 1397' 1408 http://dx.doi.org/10.1002/wcm.2269
[2]. Sun ZY, Wu WG, Wang HZ, Chen H, Xing XF. A novel coverage algorithm based on event-probability-driven mechanism in wireless sensor network. EURASIP Journal on Wireless Communications and Networking, 2014,2014(1):1'17.
http://dx.doi.org/10.1186/1687-1499-2014-58 [3]. Wang LL, Wu XB. Decentralized detection and
patching of trap coverage hole for sensor networks. Control and Decision, 2012, 27(12):1810'1815.
[4]. P. Naga Babu and Maddali M.V.M. Kumar, "The Notion of Partial Network Level Cooperation for Energy Harvesting Networks," Int’l J. of Scientific Engineering and Technology Research, 2017, vol. 6, no. 10, pp. 2060-2064. [5]. Tian D, Georganas ND. A node scheduling
scheme for energy conservation in large wireless sensor networks. Wireless Communications and Mobile Computing, 2003, 3(2):271'290. http://dx.doi.org/10.1002/wcm.116
[6]. Bulusu N, Heidemann J, Estrin D A T T. Self-configuring localization systems: design and experimental evaluation JACM Transactions on Embedded Computing Systems 2004 3(1): 24-60 http://dx.doi.org/10.1145/972627.972630
[7]. Ye F, Zhong G, Lu SW, Zhang LX. A robust energy conserving protocol for long-lived sensor networks. Proc. of the 10th IEEE Int’l Conf. on Network Protocols. IEEE Computer Society, 2001. 200'201.
[8]. X Li, DK Hunter, K Yang. Distributed Coordinate-Free Hole Recovery A]. Proe IEEE GlobecomC]. New York: IEEE, 2006.189-194.
[9]. Wang W, Srinivasan V, Chua KC, Wang B. Energy efficient coverage for target detection in wireless sensor networks. In: Proc. Of the IPSN. Cambridge: ACM Press, 2007. 25'27. http://dx.doi.org/10.1145/1236360.1236401 [10]. T. V. Chinh, and Y. Li, "Delaunay-triangulation
based complete coverage in wireless sensor networks," IEEE PerCom, 2009.
[11]. Maddali M.V.M. Kumar and Dr. Aparna Chaparala, "Dynamic Energy Efficient Distance Aware Protocol for the Cluster Head Selection in the Wireless Sensor Networks". Proc. of the 2nd IEEE Int’l Conf. on Recent Trends in Electronics, Information & Communication Technology, 2017, pp. 147-150, DOI: http://doi.org/10.1109/RTEICT.2017.8256575. [12]. WF Cheng, Xk Liao, CX Shen. Maximal
coverage scheduling in wireless directional sensor networks J]. Journal of Software, 2009, 20(4):975-984. (Journal of Software)
ABOUT AUTHORS:
A. Sandhya Rani is currently pursuing
her MCA in MCA Department, St.
Ann's College Engineering and
Technology, Chirala A.P. She received
her Bachelor of Science from ANU.