A FASTER ESTIMATION ALGORITHM
APPLIED TO POWER QUALITY
PROBLEMS
M. GUPTA
Dept.of Electrical and electronics Engg., Maharaja Agrasen Institute of Technology ,Delhi, India.
S.SRIVASTAVA , J.R.P. GUPTA Dept. of Instrumentation and Control Engg., Netaji Subhas Institute of Technology, Delhi, India.
M. S. SINGH
Hi-Tech Robotic Systems, Gurgaon,India
Abstract :
The objective of the paper is to introduce a faster training algorithm for estimation purposes. The proposed algorithm utilizes particle swarm optimization combined with gradient descent to train weights of neural network. The advantages of the proposed algorithm are fast convergence with no possibility of getting stuck in local minima. Three problems of power quality namely voltage flicker estimation, load frequency estimation and harmonic source signature identification are solved with the proposed hybrid algorithm. In the first problem the proposed algorithm is tested on given equations, then in second and third problem the algorithm is applied on real data. A comparative study of different algorithms to train the weights of neural network i.e. Particle Swarm Optimization (PSO), Genetic Algorithm (GA), Gradient Descent (GD) and a hybrid of PSO& GD is made for the above problems. Simulated results prove the superiority of the proposed hybrid algorithm (a combination of GD& PSO) as stated above in terms of lesser umber of iterations to converge..
Keywords: Harmonic signatures, Load frequency, Particle Swarm optimization, Power Quality, Voltage flicker.
1. Introduction
Most industries and commercial establishments are affected by power quality (PQ) problems [19]. Power quality has attracted considerable attention from both utilities and users, due to the use of many types of sensitive equipment .Performance of these equipments are affected by harmonics, voltage sag- swell, voltage flicker and load frequency variations. These disturbances cause problems, such as overheating, equipment failures, inaccurate metering and malfunctioning of protective equipments etc.
Ideal power quality means a perfect sine wave at the Point of common Coupling (PCC). To achieve this control the system must be able to monitor, locate and classify disturbances by appropriate measurement approaches and instruments. For this, instruments must collect large amount of measured data such as voltages, currents, and occurrence times[28]. However, they do not automatically classify disturbances and they require off-line or on-line analysis from the recorded data [5]. Thus monitoring the actual voltage and current waveforms and classifying these waveforms is an important step in power quality study.
The LAV and SA algorithms require prior knowledge of the waveform, which is not feasible [5]. Recently attempt has been made to estimate and mitigate voltage sag and flicker by using Kalman filters and it’s derivatives. [2] But, it is insensitive to noise and severe spikes in voltage magnitude of the waveform. The Hilbert transform HT has been employed as an effective technique for tracking the voltage flicker levels in distribution generator [21].
Discrete Fourier transform, least square of error, Kalman filtering, orthogonal finite-impulse-response (FIR) filtering, and iterative approaches are some of the important techniques in the area of estimation of load frequency [23,15,3]. Soft computing techniques, such as neural network and genetic algorithms (GAs), are also utilized for power system frequency measurement [3,11,13,22,29].
Harmonic can be defined as the undesirable components of a distorted periodic waveform whose frequencies are the integral multiples (non-integral multiples in case of inter-harmonics, and the frequency less than fundamental frequency in case of sub-harmonics) of the fundamental frequency [8,12,23]. Along with the above mentioned techniques identification of harmonic sources till date has been done by Discrete Fourier transform [25], State Estimation Techniques [9], Data mining tool (ACPRO) [4], independent component analysis [7] and neural network [24]. Reference [4] states that main disadvantage of neural network is that it requires significant training. We have worked in improving the training of weights of Neural Network by using Particle Swarm Optimization (PSO) combined with Gradient Descent (GD) which results in reducing number of iterations giving faster results. Training with Gradient Descent is time consuming and very slow without guaranteed global minimum.
The mathematical model of neural network is characterized by simple calculations which lead to a fast execution time of the algorithm, a property which is essential for an on-line application [4,14,24]. Particle Swarm optimization (PSO) is a general purpose optimization technique and has been successfully applied to many power system problems. PSO basically is a search tool and it is efficient to search both normal as well as the abnormal solutions [22,25].Special feature of PSO is that it has achieved tremendous success in training of Artificial Neural Networks (ANN).
One of the well known disadvantages of GD is that solution may get stuck in local minima. While if only PSO algorithm is used then it is seen that square of error fluctuates randomly and it may take many iterations to converge. To avail the advantages of both the techniques a hybrid algorithm of PSO and Gradient descent is used in this paper for the estimation of various power quality parameters. In this new hybrid algorithm chances of getting stuck in the valley of local minima becomes almost nil. The hybrid algorithm first applies PSO on a population of weights and then calculates weights of Neural Network using gradient descent.
Different power quality parameters are studied in the paper as three different problems. Problem I deals with the estimation of the voltage flicker, problem II with load frequency and problem III discusses harmonic source signature verification. A comparative study of different algorithms for training the weights of neural network namely gradient descent (GD), Genetic Algorithm (GA), Particle Swarm Optimization (PSO) and hybrid of Particle Swarm Optimization (PSO) and gradient descend (GD) has been done. Simulation results show superiority of hybrid training algorithm over PSO, GA and GD in problem I. Hybrid of PSO & GD algorithm is tested on real data in problem II. Finally, effectiveness of the algorithm is verified on experimental data in problem III.
The paper is organised as follows- Section 2 elaborates the theory of Particle Swarm Optimization and section 3 describes the proposed hybrid algorithm. Section 4 states three problems of power quality along with their simulation results. Finally conclusion is discussed in Section 5.
2. Particle Swarm Optimization
PSO is a population based optimization algorithm invented by Kennedy and Eberhart.
population is called a particle [29]. Each particle represents a potential solution to the objective function under consideration.PSO is initialized with a group of random particles (solutions) and then searches for optima by updating generations. In every iteration, each particle is updated by following two "best" values. The first one is the best solution (fitness) it has achieved so far. (The fitness value is stored.) This value is called pbest. Another "best" value that is tracked by the particle swarm optimizer is the best value, obtained so far by any particle in the population. This best value is a global best and called gbest. When a particle takes part of the population as its topological neighbours, the best value is a local best and is called lbest.[18]
The ith particle at kth iteration has the following two attributes: 1) A current position in an N-dimensional search space
( 1,..., ,... )
k N k n k k
i x x x
X (1)
Where
X
ik
[
l
n,
u
n],
1
n
N
,l
nandu
nare lower and upper bound for nth dimension, respectively.2) A current velocity ( 1,..., ,... k)
N k n k k
i v v v
V , which is bounded by a maximum velocity
)
,...
,...
(
max,1 max, max,max k N
k n k k
v
v
v
V
and a minimum velocity min(
min,1,...,
min,,....
min,k)
N kn k
k
v
v
v
V
.In each iteration of PSO, the swarm is updated by the following equations:
)
(
)
(
2 21 1 1 k g k g k i k i k i k
i
wV
c
r
P
X
c
r
P
X
V
(2)1
1
k i k i k
i X V
X (3)
Where is the best previous position of ith particle (also known as pbest) ; Pg is the best position among all the particles in the swarm (also known as gbest );
r1 and r2 are elements from uniform random sequences in the range (0,1) ;
w is inertia weight,
Inertia weight is typically initialized in the range of (0,1). A large inertia weights facilitates global exploration and a smaller inertia weight tends to facilitate local exploration to fine tune the current search area. The variables c1 and c2 are acceleration constant which control the movement of a particle in iteration.
2.1PSO Vs GA
PSO shares many common points with GA. Both algorithms start with a group of a randomly generated population, both have fitness values to evaluate the population. Both update the population and search for the optimum with random techniques. Both systems do not guarantee success.
(1) In PSO unlike GA each iteration is not a process of replacing the previous population with a new one, but rather a process of adaptation.
(2) PSO does not have genetic operators like crossover and mutation. Particles update themselves with the internal velocity and have memory.
(3)In GAs, chromosomes share information with each other. So the whole population moves like one group towards an optimal area. In PSO, only gBest gives out the information to others. It is a one way information sharing mechanism. The evolution only looks for the best solution. Compared with GA, all the particles tend to converge to the best solution quickly [18].
3. The Proposed Hybrid Algorithm
The weights of Neural Network are trained by a combination of PSO & GD, to achieve faster convergence and high accuracy.
Thus in a way PSO takes care of the disadvantages of GD. Therefore a new hybrid technique which is combination of PSO and Gradient descent is used in this paper for the estimation of various power quality parameters.
In each iteration the hybrid algorithm first applies PSO on a population of weights and then calculates weights of Neural Network using gradient descent. If the stopping criteria is met the neural network gives the estimated power quality parameter or else move to the next iteration.
In this new hybrid algorithm chances of getting stuck in the valley of local minima becomes nil as first PSO is applied. Moreover the number of iterations required to converge to the minimum value of performance index are greatly reduced when hybrid algorithm is applied as compared to when PSO alone is used. This is evident from table 1 & 2.
The general outline of the proposed hybrid algorithm is as depicted in the flow chart in figure 1.
4. Problem Statements And Simulation Results
4.1Problem I
4.1.1 Voltage flicker estimation
Changes in the envelope of 60Hz supply voltage is called instantaneous flicker level. When there are large fluctuating loads such as arc furnace, arc welder, spot welder, shredder motors flicker becomes a problem of concern, as it can propagate to neighbouring customer connection points in power system [1]. Modern end use equipment is very sensitive to voltage flicker. Therefore mitigation of flicker at point of common coupling (PCC) is very important. Controllers are designed to absorb or deliver reactive power to compensate for the difference between the measured voltage and the desired voltage at PCC. Thus accurate flicker measurement becomes very crucial.
The periodic fluctuation can be modeled as an amplitude modulated signal; where the fundamental power frequency represents the carrier signal and the voltage flicker represents the modulating signal [15]. The instantaneous flicker level (voltage envelope) depends on size and type of load that is producing the disturbance. The disturbed voltage waveform in distribution systems can be modeled as a variable amplitude sinusoidal waveform as follows:
v
(
t
)
A
(
t
)
sin(
w
1t
1)
(4)where
A
(
t
)
is the magnitude of the voltage under disturbance,w
1is the supply angular frequency, and
1is the phase angle of the fundamental component. The shape ofA
(
t
)
depends on the load that produces the disturbance. The shape can be a step function to represent the switching of heavy loads, or it can be a square wave with a variable frequency and duty ratio to model the case of a resistance welder in different operating cycles.Also, the shape can be a sinusoidal function with a frequency lower than the supply frequency as in the ac arc furnaces as follows:
) sin(
) ( )
(t Ao Af t wft f
v
(5)Where
A
o is the magnitude of the fundamental voltage ,A
f is the magnitude of the voltage flicker,w
f is the angular frequency of the voltage flicker, and
f is the phase angle. To allow the proposed estimation technique to track the envelope of the measured voltage waveform, it is written as:}
cos
sin
cos
){sin
(
)
(
t
A
t
w
1t
1 1w
1t
v
(6)and in vector form, as
1 1 1 1sin
)
(
cos
)
(
]
cos
sin
[
)
(
t
A
t
A
t
w
t
w
t
v
2 2 2 1
)
(t w w
A
Ven (8)
and the phase angle can be calculated from:
2 1 1 1 tan w w
(9)Where
w
1 andw
2 are equal to A(t)cos
1 and A(t)sin
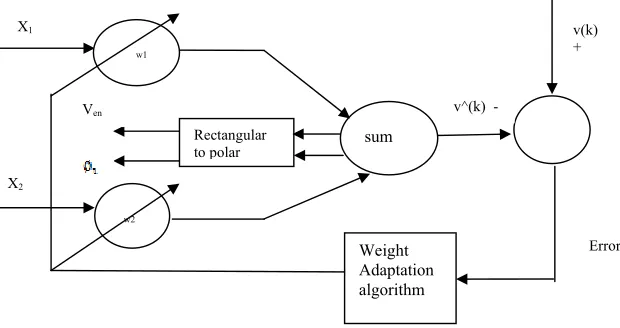
1respectively. Fig. 2 is a block diagram of a generalenvelope tracker based on the model presented in Eq.(7)–Eq.(9) In Fig. 2. X1 and X2 are equal to sinw1t and
cosw1t and are inputs to the neural network and output is the voltage waveform. Weights of Neural Network are
trained using various mentioned algorithms. The estimated voltage waveform is converted to polar form to give the tracked envelope and fundamental phase angle. The model presented in Fig. 2 is a general representation of the voltage envelope. This model can be used to detect and classify most power quality problems related to voltage, including sag, swell, flicker, and interruption.
Here estimation of voltage envelope and phase angle is done by training the Neural network using GD, GA, PSO and the proposed hybrid algorithm. Simulation results show superiority of the hybrid algorithm over other training techniques. This estimation can also be used for on-line estimation of voltage envelope and phase angle that are used in mitigation of voltage flicker using DSTATCOM.
4.1.2 Simulation results
To assess the proposed algorithm for tracking the flicker envelope, a step change is introduced at t=0.15s and is given by Eq (10) .
)
8
.
62
sin
5
.
0
3
8
.
376
cos(
)
8
.
62
cos
4
(
)
3
8
.
376
cos(
)
8
.
62
cos
2
(
)
(
t
t
t
t
t
t
v
s
t
s
t
15
.
0
15
.
0
(10)For the purpose of comparison; tracking of flicker envelope and fundamental phase angle is done using Eq. (10). The sampling rate for all the tests is set to 32 samples per cycle. Weights are randomly initialized between -0.5 and 0.5 [17].
Population size and maximum number of generation for PSO and GA are taken as 10 and 500 respectively. Learning of learning factor η is also done. Constants for GA are pc=0.8 and pm=0.1. For PSO algorithm the
constants are inertia=0.1, correction factor=0.5.
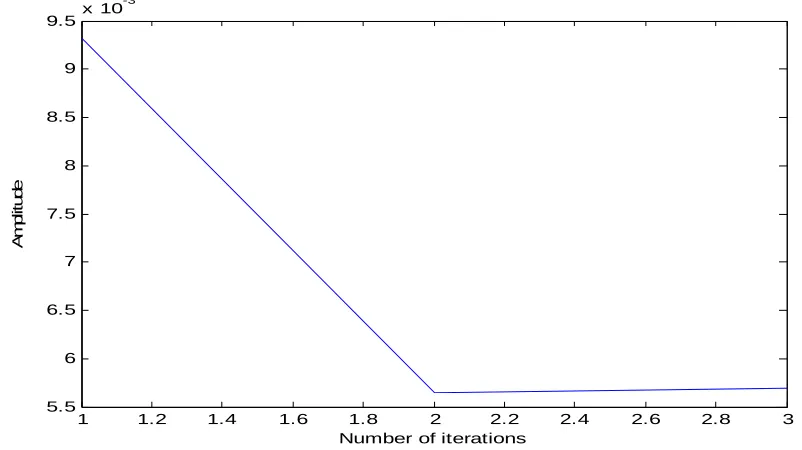
For comparative study, learning of weights has also been done using LMS as in reference [3]. In all the cases square of error is taken as an index for evaluating performance of different optimization approaches. Actual and tracked waveforms of voltage flicker envelope and phase angle are plotted in figure 3 and square of error in figure 4 with PSO& GD as learning algorithm.
Number of iterations required to achieve minimum value of square of error for different algorithms are tabulated in table 1. The results in table 1 clearly indicates that PSO & GD obtains smaller error limits in less number of iterations. The results have been improved for tracking of voltage envelope and fundamental phase angle by 3 % when compared to [3] in which LMS is used for training.
Thus the proposed algorithm evaluates the instantaneous changes in the amplitude, and tracks the envelope of the waveform in minimum time.
Table 1
Comparison Of Square Of Error In Flicker Problem
LMS GD PSO GA PSO & GD
0.02 in 12 iterations 0.01 in 450
4.2Problem II
4.2.1 Power System Load Frequency Estimation On Real Data
Frequency measurement has become an important topic when dealing with power systems because it reflects the dynamic energy balance between generation and consumption. [16] Considering the power system voltage waveform as purely sinusoidal, the time between two zero crossings is an indication of system frequency. However, in reality, the measured signals are available in distorted form and, thus, a number of techniques are available for frequency estimation [16,18].
An accurate estimate becomes harder to obtain in cases with large harmonic distortion and cases with large and fast deviation from the nominal frequency (50 or 60 Hz). A good power frequency estimation method should yield accurate estimates even in distortion and noise and track relatively fast variation in the frequency. Fast tracking is critical for applications such as under or over frequency protection relays which require obtaining
accurate estimates in a time of a few cycles or even a fraction of a cycle [3]. After testing the effectiveness of training weights of NN with various mentioned algorithms on equations of voltage flicker, the same technique
is used for estimating load frequency on real data.
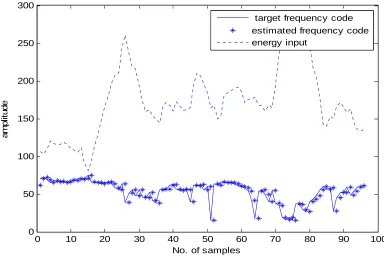
Energy drawn in MWH and load frequency in Northern grid of National Thermal Power Corporation (NTPC) are recorded for the different states after every 15 minutes. Data for the state of Punjab recorded on 17-11-2006 is used for training of the neural network. Frequency is coded from 00 to 99, for the frequency range of 49.00 to 51.00 Hz ("00" for frequency <= 49.00 Hz and "99" for frequency >= 51.00 Hz). Energy drawn (U)is the input to Neural Network and estimated load frequency (Fpn ) is the output as shown in figure 5. Estimated frequency is
then compared with the recorded frequency (target frequency- Fp ) and square of error between the two is
minimized using various learning algorithms. Once neural network is trained then load frequency is estimated for the next 24 hours. Estimated frequency is then compared with actual recorded frequency on 18-11-2006. 4.2.2Simulation results
Results presented in this section were simulated in MATLAB. Scaling of input and output signals is done by their maximum values respectively. The fundamental signal is estimated using GD, GA, PSO, PSO & GD. The influencing parameters are inertia =0.1, correction factor=0.2 delta=0.000001 and swarm size=5 while simulating for PSO& GD.
Figure 6 and figure 7 show the energy drawn between the state of Punjab and the comparison of true load frequency and the estimated load frequency obtained by the hybrid algorithm and plot for square of error. Table 2 gives the comparative study for different algorithms used to train weights of neural network.
The proposed hybrid algorithm which has proved to be a faster algorithm in problem I (with data of mathematical equations) has also proved its superiority as compared to other conventional algorithms with real data also.
Table 2
Comparison Of Square Of Error In Load Frequency Problem
GD GA PSO PSO&GD
2 in 480 iterations 4 in 160 iterations 3 in 180 iterations 2.8 in 180 iterations
4.3 Problem III
4.3.1 Harmonic signature verification
With so much of harmonic pollution in a power system, it becomes crucial to characterize and to model harmonic-generating sources. Therefore, to characterize and to model harmonic-generating sources is an important step in harmonic studies. Different categories of devices produce different types of current harmonics because of the differing ways in which a device conditions the electrical power supply. Or in other words each device produces distinct harmonics which may be treated as a unique signature of that device. These device signatures can be used to provide accurate information to power-quality management so that appropriate remedial action can be taken. Many researchers have applied ANN to locate harmonic sources. In this problem, NNs are trained to uniquely identify various types of devices using their distinct harmonic “signatures” as their inputs.
Eight devices connected in the experimental set up were battery charger, monitor, television, refrigerator, light bulb, fan, fluorescent lamp, CPU. Data (current harmonics) was collected for individual eight devices and for different combination of two devices. Each device or a combination of two devices is given a device coding like for example battery charger is coded as device 1, monitor as device 2 and so on. Total of twenty three such combinations are used which are the target outputs of the neural network. For each device coding unique harmonic signatures were captured using the harmonic analyzer. These harmonic signatures are the inputs to the neural network.
In the experiment, only the odd-numbered harmonics, from the fundamental to the 15th harmonic, of the current waveforms were of significant amplitude. Therefore, only the first eight odd harmonics (fundamental, third, fifth, seventh, ninth, 11th, 13th, 15th) were recorded. For ease of representation, the amplitude and phase angles of the harmonics were converted into complex representation, where each harmonic had a real and an imaginary part [6].
With eight harmonics taken into consideration, the feature vector presented to the ANN had 16 inputs given by the following equations:
2 ) 1 ( 2 ) 1
(
cos
i ii
I
x
for i= 1, 3,5….,n ; n=152 2
sin
i i iI
x
for i= 2,4,6….,n ; n=16 (11)where
x
i is the nth input, is the magnitude of the nth odd harmonic, and
iis the phase angle of the nth odd harmonic.Each harmonic requires two nodes for the real and imaginary parts of its complex representation. The number of input nodes in the NN depends on the number of harmonics taken into consideration. The number of output nodes depends on the number of classes to be identified which, in this case, is the number of devices to be classified in the experiment. MLFNN are then trained with all the mentioned algorithms to identify different harmonic sources i.e device coding.
4.3.2 Simulation results
Original data set was split such that 66 % of data was used for training and remaining 34% for estimation. Population size and maximum number of generation for PSO and GA are 10 and 500 respectively. Weights are randomly initialized between -0.5 and 0.5 [17].Constants for GA were taken as cross over probability=0.8 and mutation probability=0.1.While simulating for NN& PSO the constants were; inertia=0.85, correction factor=0.6. In all the cases square of error was taken as an index for evaluating performance of different optimization approaches.
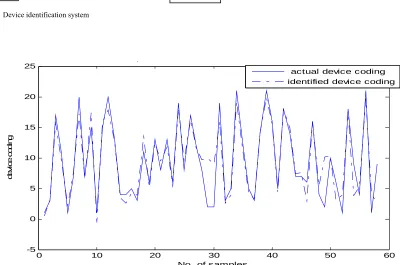
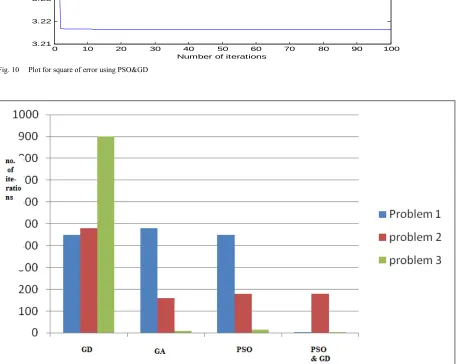
Fig.9. is plot of actual and estimated output (device coding) when neural network was trained using combination of PSO &GD. Fig. 10 shows the plots for Square of errors (SE) obtained and minimum values of square of error for different training algorithms are tabulated in table 3.
As clear from the table PSO& GD results in fast and efficient training of neural networks. Although GD gives minimum value of performance index, simulation time is more. PSO & GD attains fairly minimum value of performance index in comparatively very less simulation time
As compared to reference [6] we have been able to reduce the number of iterations required to achieve minimum square of error from 900 to 4, with negligible increase in performance index.
Table 3
Comparison Of Square Of Error In Harmonic Signature Verification
GD GA PSO PSO &GD
2 in 900 iterations 4 in 8 iterations 3.0 in 15 iterations 3.2 in 4 iterations Thus, the proposed algorithm (a hybrid of PDO & GD) has proved to a faster algorithm in all the three problems. This is depicted in figure 11, which is a bar chart showing number of iterations required to obtain minimum value of square of error for different algorithms in all the three problems studied.
5. Conclusion
A hybrid algorithm combining PSO & GD has been used to learn the weights of neural network This MLFNN is then used to estimate the voltage flicker , load frequency and to identify the harmonic source signature. The estimation process is iterative and in each iteration, first PSO and then GD is applied on a population of weights. The advantages of the proposed hybrid algorithm are fast convergence with no possibility of getting stuck in the local minima valley. The surety of not getting stuck in local minima is due to PSO and fast convergence is because of GD. The simulation results prove that the proposed algorithm achieves improved and fast convergence over other conventional GD, GA and PSO algorithms.
References
[1] Adly A. Girgis’John W. Stephens,Elham B. Makram,,’ Measurement And Prediction Of Voltage Flicker Magnitude And Frequency’,
IEEE Transactions On Power Delivery,Vol. 10, No. 3, July 1995, pp1600- 1605.
[2] A. Elnady, Student Member, IEEE, and Magdy M. A. Salama, Fellow, IEEE,’ Unified Approach for Mitigating Voltage Sag and Voltage Flicker Using The DSTATCOM’, IEEE Transactions On Power Delivery, Vol. 20, No. 2, April 2005, pp992-1000.
[3] A. K. Pradhan, Member, IEEE, A. Routray, Member, IEEE, and Abir Basak Power ‘System Frequency Estimation Using Least Mean Square Technique’ , IEEE Transactions On Power Delivery, Vol. 20, No. 3, July 2005, pp1812-1816.
[4] Ali Asheibi, David Stirling, Danny Sutanto,’Analyzing Harmonic motoring data using supervised and unsupervised learning,’ IEEE
Transactions On Power Delivery, Vol.24, No.1, January 2009, pp 293 -301.
[5] Chia-Hung Lin and Chia-Hao Wang “Adaptive Wavelet Networks for Power-Quality Detection and Discrimination in a Power System “
IEEE Transactions On Power Delivery, Vol. 21, No. 3, July 2006, pp1106-1113.
[6] D. Srinivasan, Senior Member, IEEE, W. S. Ng, and A. C. Liew, Senior Member, IEEE‘Neural-Network-Based Signature Recognition for Harmonic Source Identification’, IEEE Transactions On Power Delivery, Vol. 21, No. 1, January 2006, pp398-405.
[7] Ekrem Gursoy,Dagmar Niebur,’Harmonic Load Identification Using Complex Independent Component Analysis,’ IEEE Transactions
On Power Delivery, Vol.24, No.1, January 2009, pp 285 -292
[8] G. K. Singh,’ Power system harmonics research: a survey’, European Transactions on Electrical Power, Vol 19,Issue 2, March 2009,pp 151-172.
[9] G.T. Heydt’ Identification Of Harmonic Sources By A State Estimation Technique,’ IEEE Transactions On Power Delivery, Vol. 4, No.1, January 1989, pp 569 -576.
[10] Innocent Kamwa, Dr. Krishnaswamy Srinivasan,’ A kalman filter-based technique for combined digital estimation of voltage flicker and phasor in power distribution systems,’ European Transactions on Eletrical Power,Vol.3,Issue 2,April 1993,pp 131-142.
[11] J.A. Vasconcelos, J.A. Ramirez, R.H.C. Takahashi . and R. Saldanha, ' Improvements in Genetic Algorithms' IEEE Trans. on
Magnetics, vol. 37, No. 5, pp 3414-3417,Sept.2001.
[12] José Antenor Pomilio, Senior Member, IEEE, and Sigmar Maurer Deckmann, ‘ Characterization and Compensation of Harmonics and
Reactive Power of Residential and Commercial Loads’ IEEE Transactions On Power Delivery, Vol. 22, No. 2, April 2007 ,pp1049-1055.
[13] Kristinn Kristinnsson, Guy A. Dummount, ' System Identification and Control of Dynamical Systems', IEEETrans. Systems, Man and
Cybernetics, vol. 22, no. 5,pp 1033-1046,Sept./ Oct.1992
[14] Kumpati S. Narendra and Kannan Parathasarathy, “Identification and contol of dynamic system using neural network”, IEEE Trans.
On Neural Network, vol. 1 , no.1, pp.4-27,March 1990.
[15] Maohai Wang and Yuanzhang Sun, Senior Member, IEEE,’ A Practical, Precise Method for Frequency Tracking and Phasor
Estimation,’ IEEE Transactions On Power Delivery, Vol. 19, No. 4, October 2004 ,p p 1547- 1552.
[16] Mario Mañana Canteli, Member, IEEE, Alfredo Ortiz Fernandez, Luis Ignacio Eguíluz, and Carlos Renedo Estébanez ‘Three-Phase
Adaptive Frequency Measurement Based on Clarke’s Transformation ‘IEEE Transactions On Power Delivery, Vol. 21, No. 3, July 2006 ,pp
1101-1105.
[17] Mercedes Fernandez, carlos Herandez ,’ Weight Initialization Methods for multilayer Feedforward’, ESANN 2001 proceedings,25-27
April 2001,pp 119-124.
[18] Mohamed M. Mansour, Said F. Mekhamer, Nehad EI-Sherif, ’A modified particle Swarm Optimizer for the Coordination of Directional Overcurrent Relays,’ IEEETransactions On Power Delivery, Vol. 22, No. 3, July 2007, pp 1400 -1410.
[19] Mohammad S. Azam, Fang Tu, Krishna R. Pattipati, Fellow, IEEE, and Rajaiah Karanam ‘A Dependency Model-Based Approach for
Identifying and Evaluating Power Quality Problems’ IEEE Transactions On Power Delivery, Vol. 19, No. 3, July 2004, pp 1154-1166.
[20] Mostafa I. Marei, Student Member, IEEE, Ehab F. El-Saadany, Member, IEEE, and Magdy M. A. Salama, Fellow, IEEE “Envelope Tracking Techniques for Flicker Mitigation and Voltage Regulation’,IEEE Transactions On Power Delivery, Vol. 19, No. 4, October 2004, pp1854 -1861.
[21] Mostafa I. Marei, Tarek K. Abdel-Galil, Ehab F. El-Saadany, Member, IEEE, and Magdy M. A. Salama, Fellow, IEEE,’ Hilbert Transform Based Control Algorithm of the DG Interface for Voltage Flicker Mitigation’ IEEETransactions On Power Delivery, Vol. 20, No. 2, April 2005 , pp1129-1133.
[22] P. Acharjee, Member, IEEE, and S. K. Goswami ‘An Adaptive Particle Swarm Optimization Based Method for Normal and Low Voltage Multiple Load Flow Solutions ,’ Conf. POWERCON 2008
[23] P.K..Dash, D.P.Swain, A.C.Liew, Saifur Rahman,’ An Adaptive Linear Combiner For On-Line Tracking Of Power System Harmonics,’ IEEE Transactions on Power Systems, Vol. 11, No. 4, November 1996, pp 1730- 1735.
[24] Rutisurhata K. Hartana, Member, IEEE, and Gill G. Richards, Member, IEEE,’ Constrained Neural Network-Based Identification of Harmonic Sources’ IEEETransactions On Industry Applications, Vol. 29, No. 1, January 1993, pp 202-208.
[25] T. Assaf, H. Henao *, G. A. Capolino,’ A spectral method for on-line computation of the harmonics of symmetrical components in induction machines,’ European Transactions on Electrical Power, Vol 15,Issue 3,May/June 2005,pp 203-216.
[26] T. X. Zhu, Senior Member, IEEE, S. K. Tso, Senior Member, IEEE, and K. L. Lo ,’Wavelet-Based Fuzzy Reasoning Approach to Power-Quality Disturbance Recognition’, IEEE Transactions On Power Delivery, Vol. 19, No. 4, October 2004 , pp1928-1935.
[27] T. Zhang and E. B. Makram, “Wavelet representation of voltage flicker,” Elect. Power Syst. Res., Vol. 48, Pp. 133–140, 1998. [28]Wael A. Farg, Victor H. Quintana andGermano Lambert Torres, 'A Genetic Based Neuro-Fuzzy Approach for Modeling and Control of Dynamical Systems', IEEE Trans. On Neural Networks, vol.9, No.2, pp756-767, Feb 2007.
[29] Z.Lu, T. Y. Ji, W. H. Tang and Q.H. Wu,’ Optimal harmonic Estimation Using A Particle Swarm Optimizer’, IEEETransactions On
Fig. 2. Block diagram for estimation of voltage flicker envelope and phase angle
0 0.05 0.1 0.15 0.2 0.25 0.3
-5 0 5
time in seconds
v
ol
tag
e a
m
pl
it
ude
0 0.05 0.1 0.15 0.2 0.25 0.3
0 2 4 6
v
ol
tag
e env
el
o
pe
time in seconds
0 0.05 0.1 0.15 0.2 0.25 0.3
-2 0 2 4
time in seconds
p
ha
s
e an
gl
e
actual voltage envelope tracked voltage envelope
actual phase angle tracked phase angle
actual voltage tracked voltage
Fig.3 (a) plot of actual and estimated voltage flicker, Fig. 3 (b) plot of actual and estimated voltage flicker envelope, Fig. 3 (c) plot of actual and estimated fundamental phase angle.
W1 W1
sum
Weight Adaptation algorithm
Rectangular to polar w1
v(k) +
Error v^(k) -
X1
X2
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3 5.5
6 6.5 7 7.5 8 8.5 9 9.5x 10
-3 Error Plot with PSO& GD
Number of iterations
Am
pl
it
ude
Fig 4 Plot of square of error with PSO & GD
Fig. 5. Block diagram for load frequency estimation Learning algorithm
a
Fp(k)
Fpn(k) _
E(k) Neural Network
U(k)
0 10 20 30 40 50 60 70 80 90 100 0
50 100 150 200 250 300
plot for target frequency codes& estimated frequency codes
No. of samples
am
p
lit
ude
target frequency code estimated frequency code energy input
Fig.6 Estimation of frequency from the real data
0 20 40 60 80 100 120 140 160 180 200
0 5 10 15 20 25 30 35 40 45
Square of Error with PSO & GD
Number of iterations
Am
pl
it
ude
Fig. 8. Device identification system
0 10 20 30 40 50 60
-5 0 5 10 15 20 25
plot of actual & identified devices
No. of samples
d
e
vi
c
e
co
d
in
g
actual device coding identified device coding
Fig. 9. Plot for estimated and actual devices
Incomi-ng power
l
Device 1
Power Harmo-nic analyzer
Trained Neutral Network
Devices present in electrical power
Device 2 Device n
Harmonics
----0 10 20 30 40 50 60 70 80 90 100 3.21
3.22 3.23 3.24 3.25 3.26 3.27 3.28
Square of Error Plot with PSO & GD
Number of iterations
A
m
pl
it
u
de
Fig. 10 Plot for square of error using PSO&GD