2016 Joint International Conference on Artificial Intelligence and Computer Engineering (AICE 2016) and International Conference on Network and Communication Security (NCS 2016)
ISBN: 978-1-60595-362-5
An Integer Artificial Fish Swarm Algorithm and Its
Application on Ambiguity Resolution
Le WANG
1,a, Yue-Gang WANG
1,b,*, Hong-Lei TENG
1,c1Xi’an High Tech Research Institute, Xi’an, Shanxi, China
a[email protected], b[email protected], c[email protected]
*Corresponding author
Keywords: Ambiguity Resolution, Integer Artificial Fish Swarm Algorithm (IAFSA), Attenuation Factor.
Abstract. In order to solve the integer optimization problem and improve the search efficiency of GPS ambiguity resolution, in view of the problem characteristics, an integer artificial fish swarm algorithm (IAFSA) is introduced to solve the problem of integer ambiguity resolution. The algorithm added the integer constraints to the classical AFSA and adopted a attenuation factor to adjust the visual field and step length of the artificial fish adaptively. According to the simulation results, compared with the genetic algorithm (GA), the IAFSA can get integer ambiguity solution quickly, and has the higher search efficiency and reliability.
Introduction
Artificial fish-swarm algorithm (AFSA) is a modern heuristic optimization algorithm [1-2]. The basic principle of the algorithm is simulated by constructing artificial fish preying, swarming and following behavior, and reaching the global optimum prominent through local optimization of each fish in the group object. The algorithm has the ability of parallel, high efficiency and strong ability to obtain the global optimal solution [3-4]. Currently, the algorithm has been widely used in combinatorial optimization, parameter estimation and other problems, and has achieved good results on multi class continuous function optimization problems [5-10]. However, as for the optimization problems with integer domain, the AFSA need integer constraints to meet the characteristic of the problem.
In this paper, we proposed an integer artificial fish-swarm algorithm(IAFSA) to improve the search process of the classical AFSA with integer constraints, and to improve the problems of fixed visual and fixed step length. This algorithm realizes the optimization of the discrete integer points by the artificial fish, so as to solve the problem of integer optimization. In the simulation, the algorithm is applied to the GPS integer ambiguity problem [11] and a good result is obtained.
The Integer Artificial Fish-swarm Algorithm(IAFSA)
The definition of algorithm and its mathematical description are as follows:
The state of artificial fish(AF) is expressed asX
x x1, , ,2 xn
, where x ii
1, 2, , n
is thevariable domain to optimization in the variable domain. Y f X
is the food concentration(FC) in the current position of artificial fish, and the distance between artificial fish i and j is shown as,
i j i j
d X X . Visual is AF visual distance, Step is AF moving step length,
represents thecrowed factor and try-Number is the maximum test times when artificial fish move. The behavior description of IAFSA is the following:
Preying behavior: Let Xi be the AF current state and select a state Xj
Xj Xi
randomly1, Otherwise, select a state X j randomly again and do a judgement. If it cannot satisfy after
try-Number times, it moves a step randomly. The one step state transition equation for artificial fish
with additional integer constraints is expressed as:
j i
i i next
j i
X X
X X step rand
X X
. (1)
In the Eq. 1,
represents the rounding-off method, and rand is the random number between
0,1 .Swarming behavior: Set nf for the number of partners in the current perception di j, Visual
of AF, and let Xcenter be center position of several AF. If Ycenter nf
Yi
0
1
, which meansthat companion center has less food and is not too crowded, and then goes forward a step in this direction. Otherwise, the preying behavior is carried out. The pseudocode of swarming behavior is shown as follows:
AF_swarm() {
( (0 ))
f
n number find D Visual
for j=1: friendnumber Xc=mean(X) end
if(Ycenter nf Yi )
()
center i
i i next
center i
X X
X X round step rand
X X
else
AF_prey() Return AF_FC() }
Following behavior: Let Xmin be the companion with least food in the current perception
, i j
d Visual of AF. If Ymin nf
Yi
0
1
, which means that companion Xmin has less foodand is not too crowded, and then goes forward a step in the direction of Xmin. Otherwise, the
preying behavior is executed. One step state transition equation for AF is expressed as:
min
min
min min
i i
i next i
i i
i
X X X
X X X
X step rand X X
X X
. (2)
Random behavior: In the field of view, the artificial fish randomly select a state, and then move
to the direction. And the random behavior is a default behavior of preying behavior.
Bulletin board: The algorithm is provided with a bulletin board, which is used to record the best
state of the optimal AF.
min
min
GEN MAXGEN
Visual Visual Visual
Step Step Step
e
. (3)
Where, GEN is the iterations, MAXGEN is the maximum iterations.
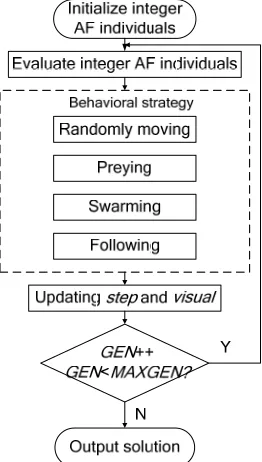
[image:3.612.243.374.165.396.2]According to the above definition, the main steps of the IAFSA can be described as follows:
Figure 1. Flowchart of IAFSA’s optimization framework.
The Description of the GPS Ambiguity Resolution
In the GPS technology, the ambiguity float solution Nˆ and the corresponding covariance matrix
ˆ
N
Q can be estimated by the Kalman filtering process. However, the final integer ambiguity solution
could not be obtained by rounding the float solution simply, it is necessary to search with restrictions according to a certain rule. Therefore, let the following quadratic objective function Eq. 4 be minimum to solve the final integer ambiguity.
1
ˆˆ ˆ
min J N , J N NN TQN NN
. (4)
For the solution of the Eq. 4, first identified an integer vector to set as the search space, and searched out the final integer ambiguity solution according to the principle of the minimum objective function. In the application of GPS short baseline, the baseline length is used as the constraint condition, and the search space is constructed as follows:
kl ij i
N l
. (5)In the Eq. 5, l is the baseline length, i,i 1, 2 represent the carrier wave length of L1 and L2
respectively.
Then, a decorrelation algorithm is adopted to reduce the dependency between ambiguity solutions [12]. The specific process is as follows:
ˆ Nˆ T S
Q SQ S . (6)
Step 2. Using the integer decomposition LDLT
ˆ T
S
Q LDL . (7)
Step 3. Using the Eq. 7 to obtain the matrix after decorrelation:
1 1 1
ˆ ˆ ˆ
T
T T
N N
f
Q L SQ S L L S Q L S . (8)
Repeating the step 1 to step 3 k times, and then the transfer matrix Z ,the decorrelation of float solution ˆ
Z
N and the corresponding covariance matrix QZˆ are given as:
1
1
1
1 1 1 1
k k k k
Z L S L S L S .
ˆ ˆ z
N ZN. (9)
ˆ ˆ T
Z N
Q ZQ Z .
Simulation Results
In order to verify the effectiveness of the IAFSA, the floating point solution and its covariance matrix after decorrelation is selected as:
4.51 ˆ 6.24 7.75 N
, ˆ
1.324 0.167 0.053 0.167 6.133 0.318 0.053 0.318 1.425 N Q
. (10)
The food concentration function corresponding to the objective function in the Eq. 3 was selected as
lg 1
[image:4.612.120.448.537.700.2]Y J N . (11)
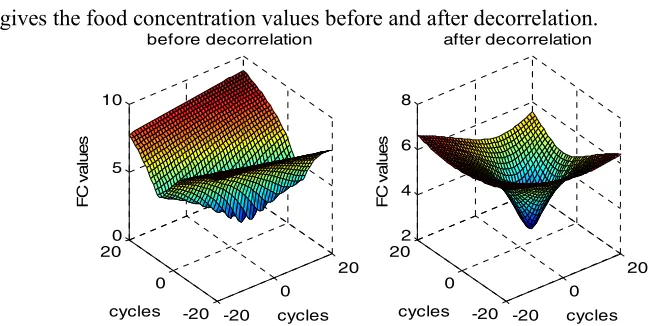
Fig. 2 gives the food concentration values before and after decorrelation.
Figure 2. The FC values before and after decorrelation.
We can found in Fig. 2 that there are many local minimums before the decorrelation and only one minium peak after decorrelation. Therefore, the decorrelation can avoid the artificial fish algorithm trapped in local optimal solution and improves search efficiency and accuracy of the IAFSA.
The parameters of the IAFSA can be set as follows: Fish scale is fishnumber50, maximum iterations are MAXGEN50, the maximum test times of AF are tryNumber100, AF visual distance is visual4 and visualmin 2, AF moving step length is step3 and stepmin 1, and
[image:5.612.215.390.193.320.2]the crowed factor is
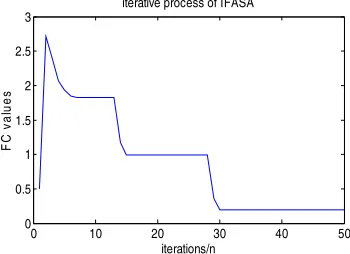
0.618.Fig. 3 gives the changing process of the food concentration function Y in the integer ambiguity solution:
Figure 3. The FC changing process in interations.
[image:5.612.190.413.397.521.2]In the Fig. 3, the IAFSA converged after searching for 30 generations so that the searching space is 1500( 30 50 ), which accounting for 2.18% of the problem space(41 ). 3
Fig. 4 gives the Spatial distribution of fish:
Figure 4. Spatial distribution of fish.
We can learn from Fig. 4 that during the iteration of IAFSA, the most of the artificial fish has swarmed to the global extremum. It means that the algorithm has the ability to jump out of the local extremum and achieves the global optimization.
[image:5.612.190.421.675.746.2]Then, we perform the experiments using genetic algorithm(GA) and IAFSA respectively. The results show that the IAFSA is shorter and the search efficiency is higher when the accuracy is the same. The calculation of the value and the calculation time in the integer ambiguity resolution using GA and IAFSA algorithm are shown in Table 1:
Table 1. Resolution results comparison between GA and IAFSA.
True value GA IAFSA
6 6 6
-6 -6 -6
8 8 8
time[s] 5.8133 2.5256
0 10 20 30 40 50
0 0.5 1 1.5 2 2.5 3
iterations/n
FC
v
a
lues
iterative process of IFASA
-20 0
20
-20 0 20 -20 -10 0 10 20
cycles initial distribution of fish
cycles
cycles
-20 0
20
-20 0 20 -20 -10 0 10 20
cycles distribution of fish after iteration
cycles
cy
cl
Through the above analysis, we can know that the AFSA algorithm has better reliability, robustness, and better application value.
Conclusions
In this paper, we added the integer constraints to the classical AFSA and adopted a attenuation factor to adjust the visual field and step length of the artificial fish adaptively, and the IAFSA is proposed, which can solve the problem of integer optimization. The algorithm is applied to the GPS integer ambiguity problem, and has achieved good results. The simulation results show that compared with genetic algorithms, the IAFSA is better than the reliability of the results of genetic algorithms, and has high search efficiency and short time-consuming.
References
[1] Li Xiao-lei. A new Intelligent Optimization Method-Artificial Fish School Algorithm. Ph D Thesis. Hangzhou: Zhejiang University, Hangzhou, (2003).
[2] Wang Lian-guo, Hong Yi, Shi Qiu-hong. Global Edition Artificial Fish Swarm Algorithm, J. Journal of System Simulation, 23(21), (2009), 7483-7502.
[3] Chen Guang-zhou, Wang Jia-quan, Li Chuan-jun, Lu Xiang-you. An Improved Artificial Fish Swarm Algorithm and Its Applications, J. Systems Enginerring, 12(27), (2009), 105-110.
[4] Wang Ting-jun, Gao Yan-bin, Li Guang-chun. FOG random drift modeling by artificial fish swarm algorithm, J, Journal of Chinese Inertial Technology, 20(3), (2012), 358-362.
[5] Peng Yong. An improved artificial fish swarm algorithm for optimal operation of cascade Reservoirs, J. Journal of Computer, 6(4), (2011), 740-746.
[6] Wang Lianguo. The Reserach of Artificial Fish Swarm Algorithm and it’s application. Ph D Thesis, Lanzhou University of Technology, Lanzhou, (2009).
[7] Hongwei Zhao, Liwei Tian. Study of the Artificial Fish Swarm Algorithm for Hybrid Clustering, J. Int. J. Bio Automation, 19(2), (2015), 147-160.
[8] Qing Liu, Tomohiro Odaka, Jousuke Kuroiwa, and Hisakazu Ogura. Application of an Artificial Fish Swarm Algorithm in Symbolic Regression. IEICE Trans. Inf. & Syst., Vol. E96-D, No. 4 April (2013), 872-885.
[9] Guan Xin, Yin Yi Xin. An Improved Artificial Fish Swarm Algorithm and Its Application. Advanced Materials Research Vols. (2012), 433-440.
[10] Qing Liu, Tomohiro Odaka, Jousuke Kuroiwa, Haruhiko Shirai, and Hisakazu Ogura. An Artificial Fish Swarm Algorithm for the Multicast Routing Problem. IEICE Trans. Commun., Vol. E97–B, No. 5 May (2014), 996-1011.
[11] Teunissen P. The Least-squares Ambiguity Decorrelation Adjustment: a Method for Fast GPS Integer Ambiguity Estimation, J. Journal of Geodesy, 70(1-2), (1995), 65-82.