http://wrap.warwick.ac.uk/
Original citation:
Janowski, Tomasz and Joseph, Mathai (1996) Dynamic scheduling in the presence of faults : specification and verification. University of Warwick. Department of Computer Science. (Department of Computer Science Research Report). (Unpublished) CS-RR-301
Permanent WRAP url:
http://wrap.warwick.ac.uk/60986
Copyright and reuse:
The Warwick Research Archive Portal (WRAP) makes this work by researchers of the University of Warwick available open access under the following conditions. Copyright © and all moral rights to the version of the paper presented here belong to the individual author(s) and/or other copyright owners. To the extent reasonable and practicable the material made available in WRAP has been checked for eligibility before being made available.
Copies of full items can be used for personal research or study, educational, or not-for-profit purposes without prior permission or charge. Provided that the authors, title and full bibliographic details are credited, a hyperlink and/or URL is given for the original metadata page and the content is not changed in any way.
A note on versions:
Research
Report
301
Dynamic Scheduling
in
the
Presence
of
Faults:
Specification
and
Verification
Tomasz Janowski,
Mathai
JosephRR3O1
A
distributed real-time program is usually executed on alimited
set of hardware resources and isrequired to satisfy timing constraints, despite anticipated hardware
failures.
Static analysis of thetiming
propertiesof
such programs is ofteninfeasible.
This paper shows how to formally reasonaboui
theseprograms when scheduling decisions are
madeon-line
and take
into
accountdeadlines, toaA and hardware
failures.
We useTimed
CCS as a process description language,define
a language to describe anticipated faults and apply a version of trr-calculus to specify andverify timing
pioperties. This allows
theproperty
of
schedulability to
bethe
outcomeof
anequaiion-solving
problem.
Andunlike
conventional reasoning, the logis isfault-monotonic:
rf
correctness
is
proved
for
a
numberof
faults,
correctnessfor
any
subsetof
thesefaults
isguaranteed.
Department of Computer Science
University of Warwick Coventry CY47AL
United Kingdom
Dynamic
Scheduling
in
the
Presence
of
Faults:
Specification and
Verification
*
Tomasz Janorvskil and Mathai Josephz
t
'Ihe tlnit"d Nations University International Institute for Softrvare TechnologyP.O. Box 3058. Macau 2 Department of Cornputer Science
IJniversit)' of Warrvick, Coventry CV4 7AL, UK
Abstract,
A distribut,ed real-time program is usually executed on alimited set of hardrvare resources and is required to satisfy timing
con-straints. despite anticipated liardware failures. Static analysis ofthe
tirn-ing properties of such programs is often infeasible. This paper shows
how to formally reason about these programs when scheduling decisions
are made on-line and take into account deadlines, load and hardrvare
failures. We use Tirned CCS as a process description language, define a language to describe anticipated faults and appl.'- a version of a
p-calculus to specify and verifl timing properties. This allows the propert,)'
of scheclulability to be the outcome of an equation-solving problern. Ancl
nnlike convent,ional rea-soning, the logic is fa'ult-monotonic: if correctuess is proved for a number offaults. correctness for anv subset ofthese fa.ults
is gua.ranteecl.
Introduction
Consider
a
real-time systerr which consists ofa
fixed number of tasks, each rvith a possibly unbounded numbel of invocations. Some tasks are periodic a:ndwill be invoked at regular intervals by timers; the others are sporaclic tasks ancl
are invoked by some other task or by the environment. Let the tasks be stati-cally partitioned betrveen the nodes of the systern, all connected by a muitiple-access network and each providing resources like clocks, memories and
proces-sors. Clocks are used to implement tir-ners, and asynchronous comlnunicatiot.t takes place using memory to implement Protected Shared Objects (PSO's) [5].
There will usually be more tasks than processors, so at each node the aliocatiort
of local resources is controiled by a reai-time scheduler; tliere is also a protocol for scheduling the netlvork traffic. Tlie hardware of tlie system may be unreliable:
for exarnple! processors may fail, memory lnay be corruptecl and cottttrtutrication may be delayed.
A real-t,irne system operates under both Lesource ancl timing cotrstraiuts, for example
tliat
a task produces 'correct' output rvithin a specifiedtitle.
But suchdeacilines neecl not be restricted to one task and rve let a lranscLctiott relate the
timing of actions in one or r.nore ta.sks. Assume that tasks couttlunicate through PSO's alrcl
tlial
norrrally they are statically scheduled using the ceiling priority'protocol [5]. \\rhen hardrvare faults occur', ltorvevel, we let dytranlic scheduling
be usecl
for a
more flexible reassignmentof
resources. Verificationof
timingproperties rvill recluire solne a.ssuntptions: (1) about, the speecl and the number of processor.s, (2) about anficipated liardrvare failures and (3) about the ntittir.t'ttttrr
irrter.-arrival tinre betweet] external invocations for each sporadic task.
,finecl process
algebr.as (e.g. [20, i1,26] ) provide an obvious formal frarrt:
work for
tIis
analysis. But basecl on t]re marirnal parallelisn assurnption [2'1].6ost
a.r'e unableto
represent clela.ys clueto
resource contetrtionor
to
uroclelsclieciuling clecisions clilectly.
illiis
gave riseto
ClCSR [9] n'hich lrrovidess1'n-chrolols
tilted
actions ancl asynchrotrous instautaueous evettts, the fortrlerre-solving cornpetition for resources and the latter for syuclironization. BTit CCSR (ancl most other such formaiistns) assulrte the use of fixed priorities ancl are tfius ulsuit,able for rnoclelling dynarlic sclieduling decisious, e.g. to recover frotu
faults. Furtlier, bisimulation-based reasoning is usually insufficient to verify
fault-tolerance:
it
ma,y be possible to provably tolerate a llumber of faults, yet beun-able t,o provably tolerate only some of thern [12]. \Vitir unpredictable faults, such fatth-ntonolorticily is imltortant but is harcl to esta,blish in tnost branching-t'irne
theories. Finally, fault,-toierant schecluling lias recently received sorne attelltiort
[3,22] bLrt in a sernantic frarnervork lvhich does not give sufficient insight into
horv proofs of feasibility of other scheduliug problerns can be olttaiuecl, antl rvith
synchlonization restrictecl t'o sitlple prececletrcc lletrvectr tasks.
This paper shorvs hou' to realistically analyse the tiruing ploperties of cotltttttt
nicating systems in tlie fratnework of timed process algebras. We use a vcrsiou of
Tirnecl LfCIS [26] ancl use timed plocesses to represeut tasks, to uoclel harclu'are a.ncl to clescribe scheclulers. D1'nan'ric scireduling is rrsecl (unlike [8,
9,6])
and priorities are assigrredto
tasks. and notto
individual actions (unlike [8.9] )This
rnakesit
possibleto
usea
single framervorkfor
reasoniug, abstractionand autonatic verification [10] aud to relate scheclulability to equation-solving [21, 17].'lhe language is equipped with the usual transitional semautics and
pro-vides r11ea1s of representing the effects of faults: semantically, using additional
r-labelled transitious, and syntactically, by 'faulty'declarations for process cou-stants [12]. For verification, a version of the pr-calculus which follows timed [26] and modal [14] extensions of Hennessy-Milner logic is used; this is also
fault-monotonic [12]. The logic allows expression of deadlines, transactions aud
euvi-rolment assun-rptions. ancl is able to detect deadlocks a,ncl verify fa.ult-tolerauce.
We start by assuming a,n unlimited nurnber (maxirnal pa,rallelism) of fault-free ltaldrvarc resollrces (Section 2). Assuming fault-free hardn'are, Section 3
provicles an alchitect ural model for describing atid reasoning about systems rvith
liltiterl
resourcos. Sect,ion 4 retains tlie assumption of unlimitecl resotlrces atrd introduces reasoning abouttht
effects of hardrvare failures. For this, thepro-cess languagt is assigned cliffelent fault-affected settrantics, an(l the logic refine<l
ilto
its fallt-rnonotonic version. 'lhese intpt'ovemetrts a,re cotttbineci in Sectiorl5, wfiere
it
is shorvn holv to reason about timing under resource limitations, intire presence of anticipated hardrvare faults. Section 6 provides a cliscussiotl.
2
Resource-basedSystems
\Ve first briefly describe a timecl process
(based on a rnodal p-calculus) to express
unlin-rited, fault-free hardware resources.
la.nguage (based on 'l'CCIS) aud a logic
and velify timing properties, assuutiug
2.L
The
LanguageLet
A
be a set of actions consisting of untimecl a.ctiolts(f,)
and tin'iecl actionse(l),
o1efor
each non-negative realI
ancl represeutinga
delay ofI
rrnits oftime. \4/e shall norrnally exclude I
=
0 and rvriter
instead of e (0), aucl representsy.rrr'lrronization b; .orrrplernerrlary rrrrlirnecl acl.ionsn arrd A (u = u or,d e (1) :a".1
e(r)). Let
Lc
f.,
f :A-A(.f(e(t))
=
E(l) and/(a)
=/(a))
alidI €X,a
set of process coustattts. Also, Iet a
€
,C ancla
€A.
There are three syntactic categories: process expressiotts Pe, declaraliotis4
aucl processes P'Pe::=0
lXlo'PelPe*Pe
l:::tllz\tr=P"l lao.1lzloc
(l)
P
::=0
|pr.zl
Io.P
I P+
P I PIPlP\,
IP[/]
Inforlrally.0 represents cleadlock, a.P is process P rvit'h plefix o aucl process
P
+
Q
reprcst'nts altematioti. PIQ is usecl for coucurrent coltposition. P\
t
for restrictio".
P[/]
for renarning andpI.:1
for the solutionI
of tlre recttt'siveequatioDs 21. The cieclara.tions include tire c.nrpty cleclaration
[],
/1[x'Pe].
to{eclare
X
as Pe and other constants as in :1, cr O C to prefix n to the right sicleof all cleclarat'ions in C. and zl
tl
V
to sunl tlte right' sicles of the correspondingdeclarations
in C
andV.
It
is assumeclthat
in
pX.A'
X
anclall
constantsocculring
in C
are also declaredin
z\. \4re abbreviate[[X
=
Pe]l]''Qe]
as[X
'
Pe, 1']
Qel and will often write[I '
Pe I p] for all declarat,ionsI i
Pesuch that predicate p holds. Formally, the semantics of Zl is a pa,rtial function
[Zl]
defining the a,ssignmeut of process expressiotrsto
process coustants, as ittTable 1, and rvith dont(A) for the constauts declarecl ir.r A.
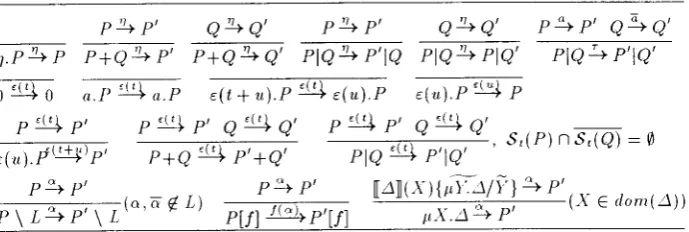
The semantics of processes is opera,tional, ancl is defined in Table 2 by
struc-tural induction. closely following [26] . The first rou' of rules applies to all unt imed
act,ions plus
r:
\
€ LL){z}.
Row-s two and three defiDe the passing of time andapply t,o l,
u
)
0. Thc rules let o.P idie indefinitelyuntil
the environment isreacly to sl,nchronize. There is no rvaiting once syttchronization is possible (nlax-irnal progress). i.e. no delay for
r.P
rvhiie PIQwill
idle unlessP
ancl Q can sylc|ronize: Sr(P) includes all actions a of P n,hich a.re possiltlt'rvithinI
tirneruyrits. For exanple, Sr(o.P)
:
{.},.S1(r.P)
=
0,Sr+,(e(l).P)
=
S.,(P) and.S,(PlQ)
=
.Sr(P)U.Sr(Q). Time is corrtinuous, and delays do not ca,rtse loss ofac-tiols
(persistency) or result in reaching clifferent sta.tes (cleterrttinac)'). Ro_rv fortrprocess obtairled by simulta[eous substitution of all constants
Y
in/([z\](X))
by
tlreir corresponding fixed point,s pr'.a.In
t,he sequel rve shall appll' obvious extelsiols of the la.nguage to describe value-passing attcl a.ssttttte the rtsrtal
lranslal,iorr itrto
llt.
basic latrguage [19].2.2
The
LogicThe logic is a versior.r of the ruoclal p-calculus rvhich follows the tiruecl exteusious
of HN{ logic [26] (nreaning, antong othel things, tha.t rve need infinite conjunction)
and rvhic| for sirnplicit.l', likc tlie process la.uguage, does not allorv for nestirlg
of the fixecl point operator [13]. Let e be a.n etl.rl;tv seqllcllce ancl let 3 clenote
s €
A*
rvith all r's retnoved (ancl deltrys sunltlled).a=e ri':-nf 7s-=i
/.'\e[)t-r.s
=
e(l)ni e([s: e(t)i a(lf[r)s:5(l f u)i
(
j'
T[e forrlulas,|
are built using constants l1 ancl iclentifiers Z, t'regatiotr,disjunc-tiorr rvhich is possibly infinite, the existential modality. and tlie greatest fixecl point, rvith the other operators derivecl as usual. As in the process language. the
syltax consist-q of formula expressious
fe,
declaratiolsV
and forlnrrlas l,.Fe
::: tt
IZ
l-fl.
I
V,erfe
|(6)fe
V
::=lZ'
Fe)llz
?
FelYF
::-tIlvZ.Y
l-F
I
V,err
I(a)f
For silrplicity rve rvlite
Y(Z)
for the folmula e-rpt'cssiou rvhich is assignecl to Zby'V alcl as usual assunte that, iclentifiers in V(
Z)
occtr"vithitr an even ttttllrbt'r'
of legations, each also cleclared in
V.'llhen
the setuautics ofF (Ie)
is clefirreclrelative to au a-qsigutlettt 6 of iclentifiers
Z
to
process-sets and is the set [l:],rof processes that satisfy'
M
(we writeP I
,11 rvhcneverP €
[;1/]). Pointrviseinclusion ancl sutliuation is used
to
define[zZ.V]o
and welet [V]o'
be the'assignnrent of a\I Z € dorn(V) to
[V(Z)],r'
[t3].fftt\t --a,.r
P
[Z\r, =a"16(2)
[-M]o
=a"1 P-
[.lf],
[A,.,
Llo]o =a..1|,.r[,'1/1],
[r?.Ylo
=a".rU{6'
| 6'g
[Vnd'](Z) n1a1,l,l1 =a"y {PlY r,-,,(P4
P' AT =6)
+
P'e
[Mno]Table 1. Denotational senlantics of cleclarations. dom,(l)):a.,
[a
i! "4](I)
:a.,
[1[r'=
Pc]11-r1:n",[l
(r vn(-{):d"/
if I
€ dom(A)if -{:
)''if Il).
-{e
dom(A)if
-{
€donr(l)-
dorn.(V)if -I
€dom(l)n
dom(V)if
-Y E rlonr(V)*
clom.(A\0
a.[,r](x)
!,,
t firntrt
f
[lni-\)
Table 2. Operational sernautics of processes
pt4p, e\e, pt4p, e+e'
p\p'e5e'
;.FT
p
p+aEV V+aEa'
ptaT
pla
FtaE
ptq
-Vat
Ptd
;i-};
;r''+
*P .11il7g.1"F .(,,)rg;
p'('t
p'
p'"1
P'
q
!:!
g'
,
g!J2:l'.
s,(p)ns,(e)
:0
"t; pgF
-r;ag+ t',.q, --p[lg pld
I
vrr'
' ' 'P
+
P'
[a](r){1i---r
111:+e'
P3+ P'
P-i157'v
1a'o/
t'tF
l,-r.J
(I
e rlonr(J))41J.-+.
p,lf)
Though the logic allorvs verification of timed processes, in general a.n rinlinrited
numbeL of processols is assurnecl
to
be available to execute coucrirrent, tasks. C)onsider, for instance.n
independent sporadic ta.sks P1, each irrvokedby
an action a; and responding rvith Dl after 11 units of time, perhaps represerlting t'he spetd of tlre unclerlying processor; Pt:def
/rX.[-X]
ai.e(ti).b,..\]. LetF =de.r
l\'i'_ruZ(i).lZ(i) ?
Ao..o,lo)Z(i) Afa;lZ'(,rJ))lz'(i,t)
:
(bi)tt Albi)z(i) v \,/., (rr)rrnA,4a,[c)Z'(i,l) A A,,5,,- rle QL)]z'(i,t
*
Ir)].F states that if tasks are takerr toget,her then each is either reatly fol itrvocation
ol
is able to complete n'ithin 1,. Since li"=rP,l.F.
rrrtlcss processiug takcs uo tirne, eaclt task must be executccl on its ou'n plocessor.3
Resource-LimitedSystems
In orcler to reason about the timing properties of comtnut.ticating systents,
it
isessential to cousicler the limitations of the underlying liardware. Olle approach is to constrain the seura.ntics of pa.rallel cornposition, so that PIQ
4
P'lQ
"nota,lways" follows P
J+
P', and then verify the properties as usual; auother is have the usual sernantics ancl to verify the properties "rela,tive" to the euviroutttetrtconstraints [15]. \\re take yet auother approach n'hich leaves the sema,titics and the logic unchanged but represents resources syntactically. The rnapping between
Tasks and r?e.sorrrces is the goa,l of lhe Schetluler. Given a set .L of scheduling events and the T'im.ing properties to be estabiished, finding a fea.sible schecluler
(if any) can be represettecl as the equation-solving probleru [21, 17]: (T u s k sl Re s otn' ce sl S ch erlui e r )
\tr
|
T i rn i tt, gThis makes
it
possible to represent linrita.tions in the nurnbet'aucl also the speecl of processors. so that tasks need not represeut dela.ys explicitly. We first showhorv a scheclLriel maps tasks to sharecl resources in a cetttralizecl systenr. \Ve sliow
[image:7.595.104.449.146.262.2]3.1
Tasks and ResourcesCgrrsicler a set of tasks /ask,;, sotne of thcttr periodic
(i
€
[1,per] ) ancl invokt'dby tinrers, and thc others sporaclic
(i
€ [per'*i.per*.spo])' atrd invoked bv theenvirolurelt or by sorne other task. Let ?nsfr1 be a simple sporadic t,ask wliich is
ilvokecl by action ?nr fronr the environment aucl rvhich returns a resuit by-oul1.
To represent resource-limited executiotls, let, Td.sfri request a processor (reg,)
irtu'r'recliately after
it
is invoked ancl release the processor (r'eli) rvheu retrtrniugthe r.esrrlt. To t,ake account of the execut,ion speecl, assulle
that
after beingallocated. Trrslr cart only proceecl
if
proviclecl rvith the actions lzicft;.Ta sk;
-
4,f
in,iQ:).rer16.p X (r).(t icfu rlr J) []'( y)
]
re li.out i('1y). i ni Q).t' ern.f (r )]\\,'e rrse lricl.l to lepresent tlie basic rnachinecycle of the undcrll''iug plocessor aucl
giverr Pr.ocessor'p
(* €
[1,pro]), speedp. is the minimunt tiure that, must elapsebetrvecu tn'o ticks. Which task is currently executed b1'Processorl depends on thc value receivecl by the last action prl1, (for pt'e-etnpt). The actioti is available
at, any tinre ancl can pre-empt executiott of the current task.
l't'oet ssor'1.' a,.1 prl e(i\.
sX(i).
[X(t)'
pri1,(7).I
(i ) -t t(speerh ).rlc*;.I(i)]
'flie
iclentity' of the executed 1,ask is available to Processor'1 but the cottvcrse ispot trrre; a task llaJ'be allocatecl to cliffelent, processols clrrling otte ittvocatiott.
r\s contrrrorr iu scheduling theorl'. we assulne that ttrslis cauuot voluntarily'
suspencl themselves. One more assurrrptiou is that all pt'ocessot's sltare a colttlttoll
instnrction set, each taking a. basic tnacirinc cy'cle. Wit,hout cotrttttrttricat,iorr. the cleclarations t,it:k; r1,l
ij
for indepenclent tasks TosAt call only'take ttlo fortrls:-I(")'licAl.X'(f(r))
I(r) t
ticki.if p(;r:) t,henI'(r)
elseI"(r)
./(rr) is assumed
to
be a function evaluation andp(r)
a test ott tlte argutttentvalue
r,
each taking one machine cycle. Any nlore complex courputa,tionI
isassumed to be ma.cle of basic tnachine opelations like
/(r)
and p(r).So far lve have only considered one form of invocation. by'action rrln front t'he
environrnent. Tasks ca.n also invoke each other (intry), ofteu as the last actioti
of invocation, and be invoked by tin.rers.
A
tinler (Tinter;) is alrvays readl' toa.ccept a uerv time period (t,inte;) afl er n'hich
it
rvill tirlreout (lzirrieo'trl; ).Tinter;'
p-I.[X
:lirrre;(l).I'(l)]
[-{'(l)
t s(l).I'/ !
t irne;(u).I'( u)][-\"
:
1??]?€o?di.II
tintet(rr).I'(u)]
3.2
SchedulingThe schedulel' maps tasks to resources. Define tlte following sets of act,ions:
lls
for conrrnuuication bet,u,een tasks a,ncl the scheduler (reqi and rel;). 1-lr for
ac-tions between tasks and resources (licA;)and ,Lsr for actions bet'rveeu tlie schcd-uler and resources
(prlt).
LelL
=a,.f LtsULtr
U Lsr. Thcn using a schedulerwhich accepts requests (req;) for processors, allocates tasks to processol's (prlp)'
ancl keeps a,n updated knowledge of available resources
(reli),
tht' nrapping re-sults irr tlie plocess (TaslslResourceslSchedzler)\2.
For example, let
/:
[l,.s1.io*perl-
lI,pro]U
{f,T}
I'ecorcl the status of t,asks:if
"f(
t)
: I
then Tas[1 is rvaiting for an invocatiou;it
f(i)
=
T
then itis act,ive
but
rrot. being executecl; anclif
/(t)
€ ll,pro)
thenit
is trrtclt'r' e-\ecu-tiorr ori Processor'.11,).If
/(t)
= T
then we say' that Tos[1 is suspenclecl andif
k 4rng{f)
then Processorr. is idle. Let initially "fo(i)=
I.
Tlte lelative'itttpor-tance'oftasks is represeuted b1'their priorities
r:
[1,spotper)
- f.
trsingpriolities, 7'asA1 n'ill be allocatecl a processor only
if
lno'Iaski of highel prioriti.' neecls one. a.s represente'cl by the schedulerpX(/o).[f
(/)
=
"']
s'here preclicatemcr:r(i.f):a,.t
.f0):
TA(/U)
=
T*
?r(i)>
zr(j)) andr(/)
=I,ro,=,
reqi.x(flT lil)+
L
t rote t L,rj
reli' X (f[L
Ii])+
Inro.r(i..f
) L
o g,n o1.r 1 p;t k()'x
( fLk / i))
Once allocatecl, thc prioritl'-based scliedulel
nili
let a task run until itscomple-tiori.
A
7,trc-etn1tlitte schecluler. itr coutrast, uay't't'place tlie task(7asl'r)rvitlr
thc lou'est
priolity
anrong all executing tasks,rrrirr(j,./),
lry the tasli (7'rr.'-{';)rvith the highest prioritl- alnong suspeudecl tasks, rnar:(r.
/).
Then prerlicat,entin(j..f)
:a"f
rns(f)
-
ll,prol
A(/(*)
€
[1,pro]+
n(-r)< r(t'))
atrcl srtch aschecluler is
pf
(/o).[f (/)
:
..] n'herer(/)
=
Ir.r=,
recl;.x(flT
lil)+
I.iii
1s1r'r] reh'x
(f lL Iil)+
I''nr1
i, l ) D r, (,,, g (.f ) pFt r ( i)' x ( f lk Iil)l+
Dnrin(j,J ) n''t 1 1t rtt1' X ( f lf 0 ) I i'T I
i))
For pre-empt,ive schedullng of inclependent periodic tasks, an opt'irrtal alloca,tion
of static priorities is the so-called rate-monotonic order, inverse-proportioual to
tlie tasks'invocatiot'r periods: if periodi
l
periodi tlien ;r(r)>
n(f ).3.3
ComrnunicationAssune that tasks commulicate asynchronously througli slra.recl objects. In its
sirrrplest forr-n. such anObje ct provicles some data,storage that can lre reacl using
t,rvo actions (say request and completion) zrncl rloclifiecl, each rvith sortte clela.y
rleluy. Let ,L be thc initial value.
Object -,i,. 1
pI(I).[-Y(r)'
rrl.t(rl,elay).rr](,u).-\(r)+
Suppose ive liave oDj sucli objects and let us rede{ine r?esott,rces to take accottut
of both kirrcls of resources: ResorLrces
-
a"y ll'-l'rPro(:(.ssot'i I lib!-rObjecti' Bt
rvitfi
ltutual
exclusiorr over sharecl objects, a lowerpliority
task nlay suspetrcla higlier prioritl'task. Fol example,
if r(i) > ;r(f) ) r(k),
llirsk1.rlay
seculeexclusive access to tlie sharecl objec.t before Task;. Then Tas[,1 has to rvait until
Tcrskl, cornpletes and fasfr, ruay be executecl instead
(priorily
ittt'rrsion). Assunetliat
in orclerto
use a shared object Object1,7'as11 first t'etluests access fronr thc schecluler by the actionregt\j):
it
u'ill later perfortllt.ii(j)
t,,release the object. This requires sorne adclitional folnts of cleclarations for Tas&'1 :
-\U)
=Ta,riU).nl,.rtl1(t)./',/r(i).-\'(J')
I(j,.r) =,'utJj).G;
(z).,r/i(j).-\'
As lick, fepres('lits clel:r-yscaused by thc undelly'ing plocessol's. it neccl uot allPeal
i1 t|tse
<leclarations: deia,ys there' arc only causccl lt1' 1hc sharing of obit'cts(r.esolvecl b1'the scliedrrler) ancl the tinre
it
takes to access tltelll.The Ilrltecliate Cieililg
I,riorily
Inheritance Protocol solves thc ltloblern byassiglilg a prior.itl'to an object, tliat is the rnaxitnumof the pliolit.ies of all tasks
that shale the object p : 11,
obi)-
N'
Thcn each tiure a task obtairls access to allobject. its prioritl.is in-rmecliately raiseci to the ceiling level. Iror a given obiect.
let rlre fulctiop g :
ll,objl * l{
U{I}
retuln eithcl the original priorit"'- of thetask accessing the object, or
I
i1 there is no such task. lnitiallr'. g0(/)- I.
The protocol can rlo\r be aclclt'd to the scliedttlet'. as belou-.f
(/, r'. ;')I
Irr,r=t
rcql.I(.f[T
li],s.r)+
I'"'e1r'r1
rr/;'
\
1flLl
il's'
ir)+I'
rr I = 1I'e11, ( J ). -r ( f , sllr (i ) I i). t lp( i ) I i)) +
L,o
)* tre11 (j).r(f.
llL
I i), rls (i) I i))+I',
o'( t,.r )l)
ug"
u 1.t tIfir
( t )'r
(/[r'/t]'
g' o)]*
Irnr:n (j,.f ) lm.rr; r (
t)'I
( f lf 0) I i'T I il' g'")
3.4
Distribution
The ntapping betrveen tasks and l'esources has so fa.r assunrecl ttse of a c.elllral-ized scheclpler. Suppose instead that ta.sks are partitionecl betrveen ntl
>
0 nocles (i\,o|ei ) ar.rangecl into a logical ring and counected by a rnultiple-acccss uett'ork (-\relrirort'). Each nocle provides computing lesoulces iike clocks, tlletnorl' andprocessor.s and each has a local scheduler. The actions at i\{orle'rvill lle clistin-guishecl lrl.tlie srrperscript
i,
l{odei -ae.1 (TcrsksilRfrotLrces'lSche,/u1eril\It.
Suppose that each ta,sk has a local object (Object;
for'faski)
to holtl tlie sequences of ruessages to be st'nt.'fhc sencling o{'a utessage rrr is thett tept't'sctttecl b-t' the follorving rleclar;rtious:-\(rrr)'
rrrt/i).trt;.rcli(s).i,'J,1i;.II1rrr,.sI-I1(rrr,.s)
i
licl;.I2(s:
nr)Silce we assulne that tasks cannot voluntariiy suspend thet.ttselves, a task cau only invoke a reurote task ancl rvrite to a rentote object. Therefore data messages lia.ve tlre forur n.c.j.r' rvirere tt
€
[1, ncl] is a node (nI
i),
c is either introAe orurite,j
identifies the task (c-
irrt'oAe,i
€
[1, spo" 1per"f) or object (c=
Lurite,J e [1, obj")), and tr is tlie value passed to the ta.sk or rvritten to the object.
tlnlike the scheduling of local resources (processors or objects) betlveetr tasks, the schecluling of netrvork traffic (deciding which node is allowed to transmit and
for Iow long) cannot be done centrally. We siiall use a simple protocol based on
a cir.culating tokern (lofre rr). After receiving the token, y'{ode' nray trausurit ottc message (thc first message of the highest priority task) before passing the token
to
IYodei*r.A
task Tcsl'', u'it,h the highest priority is used to irlplement theprotocol on each nocle. This task is spora.dic, iuvoked by action irz" and producing
a result bV
""tl
.Given a function lr(i) on[i,nd]
which returus eit]rerI
ol
t'he last message receivecl fronr Arode; (40(t)=
I),
tlie ttetrvork is defiled belorv.l{
etuork
-a,y
StX(h6).[f(/r)=
Do1;y=tout\(r).X(hl,
IjD+
D n11 y7t
1,r(t +tt "' oo " o
(lr(j)).r(Atr/i]
)]Let tasks be ordered accorcling t,o decreasing value of priority, u'ith tire tasks
of tlre same priority orderecl by the uurnber
(j).
Givenj
€
[1' spo" + per"], lctsuc(j) return an irnmediate successor of
j
or' _Lif
there is uo successor. 'lheur
deternrines not only the importauce of tasks but also of messages: Task\ -a".1
pI.[X'
...]
and I'ask\(token):a"yp]''lX' "']
rvith the cleclalatiotrs belorv.-\
=
irtirp').tttfr.-\r(r)
irtr'ocat iotrIr(r)
'tick\.if
;r:f
token lhe n X2(:r:) eise)'l(0)
tokerr receivecliIz(r)
'
tick\.if t f
i.c. j.u t,hen X3(t) e/se -Xa(c, j, '"-) for us'/-Ys(.r) 'r'elt.oudlr;.-f
forrvardr
X/c,
j,u) :
tick\.if
c=
inuoke. then X5(j.r)
else ,Yo("r,,)
invocation?Xs(l,
r)
=
re{,.;nr'11u;.f
invoke 7Io(-1,
r)
':
veil(j).rL,rit,'l.r-1'r(,,).rt
write toj
-;
X,
: i.el',.X
releaseYt(j)
=
tick\.\'2$uc(j))
sn'raller priorityYz(il
'
tick\.if
i
=
Lthen\\
else7'a(i)
the smallest'iYj
=;i.orir(loken).-Y
elease trud foru'arcl\'+(
j)
=
vdilU) rAj.ra',l4.iift(r).Y!(r,
s)
readj
)!(.r,s) 'tick\.if
s=e
thenl'l(j) eiseYo(r,t)
notnessages'i)'o(-1,
") '
tfcfti.)'7(j. s6.s)
take tlie liead1'7(j,m,s)
'ffcki.Ii(j.
rn.s/)
a'ke the taill!(j,
rrr. s1=
re(r111.r.7;(").r€il(i).)'g(rr)
rvrite thc t,ail-;_
I!(nr)
I
,'e l'1.ottt'r(m)l*" (token).I
release atitl setrdf ,et .\ orlr iltol'" n) be like .\'otlrt lrul n ir h fu.s{'i (lol't n ) replacirrg
Tu"l'!
arr<l le tl,{orler holcl t,he token initiall.v. Tiren for Lc contaiuing actions rirr" ancl otrl", rve
3.5
Speciffcation,Verification
and Equation-SolvingSo far rve have shorvn hon, a sirnple timecl process algebra fi'amervork cau be used
to
builcl a fairll' general rnoclcl for corrrt'uut.ticating systeus rvhich is capable o1'representing resource-linrited executions. We shall now shorv horv the timecl and
untin'red properties of such s1'stems can be specified ancl verified.
Cionsider tu'o actions. a ancl 6, fol which
it
is required that x'ltertevet o occurs. b occurs at tnost d later (71fu,b,d)) or d earlier (72(t'b'd)).T\(a,b,cl) =a,1
uZ.lZ
'lr.]Z'(0)
A/1,*"lalZl
lZ' (t
)'
(b)1/^
[b)Z v V,,(rr)lrAA,lulr)z'
(t) AA,.a-,
le(u))Z' (t+
u)lT2{a,b,d) =a,,1
vZ.[Z
'ltL]Zt(0) A |1,*"lctlZ)[Z'(t).ft]f
f
tA,7rl")Z'(t)
Afi.,r.o[e(u))Z'(t+ tr)lt
< d]lZ' (t
)'
lb)Z A A,,*blalZ'(t)
|t >
d)A sir-nple functional propert,y, iu contrast,, l'ould state that if tlie value
r
rec.eiveclb1'action
n(r)
satisfies a prr>couclition pre(;r), the value y of b(g) nrust satisfl'a post-condition posl(r,y). This, plus the timing requiremeut that b(.y) occurs uo later tharr 11 aftern(r),
is defineci by the predicate belon'.Ti(t(t:):
pre (.r), b(y) : post(r,y),d) =a".ruZ'[Z
=A".,7,'.1"y[(Q))z'(0,r) A A',-r''" r"-rla(t:))Z) A/\,,*.lo]zl
lZ' (t . .r' )
=V !),r,o.", (,,u r ( (D( e ))
tt
n lb( y)) Z ) v V" (cr) tt nA,,tlr,)Z' (t) A A,,<.r-,[t( u)lz' (t + u)l
It
is also eas)' to clefine tliat, o occul's nit.h perioclp
ancl ji11er 11. relative thc beginning of each peliocl. Predicates such as this catr be usecl as the l;uilclirtgblocks for typical transact,ions, relating lhe timing and values of task ittteractious.
A fransactions s,ill typically rcla,te the input to a. task (Taski) u'itli t'he otttPut
frorl
another t,ask (Tn.si';) which tnayuot
be on the satrle trode. Let 7irs,t;be loca.ted at .Nor/e",'l'cr.ski
aI
ltiode"' and after the action irri(:r:) irr ivhich rr'satisfies the pre-conclition
prr(r),
actionou{'(U)
must occur no earlier tlian d1ancl no later than t/2 ancl
*'ith
g satisfying the post-conclition posl(.r', y)' Transaction -a,.s Tl(itt'i'@) :pre(r),"".{'@):
post(.r:, y), ri 1)AA., ., Trli''o' 1'1'
^'{i'
6) , '12)With lirnited conrputing resoufces and in the absence of assumptious about hon'
often
inf'
arrives.it
is in general impossible to nteet this transaction. Let d2 be the minimum intet'-a.rrival time for action zrrl':.'1.)-stl?7?pl io?? =,ir.f A,,,, T2( i n'l ( r: )' rinl' ( y), rl z )
Tlren given a real-tirrrc s)'steln (Sysl,etn), the properties of trausactions trrust
orrly be verifie'cl rvheu tlrc assrtmptiotrs ale satisfiecl.
,9yslent l,,lssurrrptiort s
)'f
ransrLctiort sAnd
if
System has the form clescribed earlier, verificationwill
take afull
ac-count of the constraint,s imposed by the underlying irardrvare, for centralizecland distributecl systems lespectively.
(T a s k sl Re sow' ce sl S che dule r)
\I
l,4ss'rrrnpl rio??s+
T r an s act i on s (l{oclel (token)lli!_tl,{ocle'lhretuork)\r. F
Ass'uttptiorts:+ Tr(i.tlsacti.ortsOne more advanta.ge
of
representing resource coustraittts syrrtactica.lly is t,hc possibility of fincling a feasible scheduler(if
one exists) automatically, as tliervell-knolvn equation-solving problem. Tlie problen has attracted sotne attention
[21, 17] and algorit,hnric solutions have been plol;osecl ancl inrplerttcnted [10].
Fault-Tolerance
for Unlimited
Resources
In
Sect,ion 2 rve introduced a general framenork for desclibing and reasouiugabout distributed ancl rea.l-time systems and in Section ll showed horv to represeut
and verify systems rvhich can only rely on limitecl (in terms of the nun.rber aucl
speed) set of hardu'are resources. And we made
it
very specific of iiorv hardrvare(processors, memor)'. clocks or communication media) should behave in older for propelties of tlie overall systen to hold. \\/e non' shorv horv to reasou about
systems that ale designed to sustain anticipated hardrvare failures. to shorv that
thel'are provably fault-tolerant. \Ve continue clesclibing faults ancl their effect
on t,he semant,ics of TCICS, and then show horv rve can prove fault-tolera.uce. fot'
given assumption about fa.ults and first for unlintitecl rcsollrces.
4.L
Faults andtheir
EffectThe fault-tolerance of a system is ofterr verifiecl by synt:rctically' tlansfolnring
it
irrto its fault-affecled version and then verifying its properties asif
no faults are present [18]. This method allows sta,ndarc] techniques to be usctl for provingfault-tolerance, so \\re begin by examining irou'
it
ca.u be rtsed itt our logic.For a process Q, assume that a 'faulty' declaration
f,
iu
geueral diffeleltfrom 'normal' declarations being part of the syntax of
Q,
is usedto
specifyarrticipa.ted faults. Let Q be transformed
intoT(Q,P)
to represent the eflects ofsuch fauits. The transformatiou is clefined as follorvs.
T (0,\I/)
:a"1
0T(pX.A.V)
:d"r tlx.(AfiV)
T(o.Q,i!)
-a"1a.T(Q,V)
T(Qt
+ Qz,V) =a"rT(Qr.\I')
+ T(Q2.{r)T (Q
tlQz,i!)
:a,,J T (Q r,{/)lT (Qr.{/ )T(Q\
L.tI/)
=a".rT(Q,f)
\
I
T(Qlel.v)
=a" 1 T(Q,V)lslAssrune that
7(Q,f)
is well-definecl. i.e. all coustant,s declared. ancl sinct'farrlts are autononrous, a.ll expressions
[rZ](I)
ale t'itlier prefixeclll1-r
or a.ltra surllnation of such expressions. Such a 'faulty'' declaration
{'
is gcnerated b1' tlre abstract syntax V:::
r
Oc
I tZ.} V. Sorrle exatllples are a processor rvhiclt 1ra-r- clecide to tick early, a tirtrer n,hic.h tnay tirneortt late. a shared object rvhichsornetimes fails
to
remernber a. rvritten value auda
ttetwork ivhich mav lose nlessages. Such faults are rePresentecl by the rleclarations below.V1.,o,,,,o, =,t,1
r
(.a)[X(t)
'prl6(j)'I(.r) +:(
speetll-
1)'l1cA','-f (i)]Vri,,rr,
=tte.1r
Q)lX"
=
l1l;.tr'rnrotrt;.-Y + lzirnel(u).f '('u)lVobje,:t
=d"1r
6r[I(r) :
rr!..llel,tu1.r'rl12).I(r)f
ul(y).e(rleln9).I(,r)]V,etttork =d".J
r
(l
[f
(ft)=
f
(lr[f/j])]
Horvever, given
a
process Q, a spt:cificationI
of fault's artcla
propelty' ,Ftlrat rnust liold ciespite these laults. verifying
T(Q,V) I f,
is not suflicient toprove that Q is lault-tolerant Ii2].
It
is uecessary' to take iuto accoutrt that faults are unpredictable: after proving coLLecttress for a uumber of anticipated fauits. correctlless for any sul)set of tliese fault rnust be (provably) guaranteed. This.horvever. is not the case for Q and
f
belolv becauseT(Q,V)
=
I- (in thc pl'esence of all faults) but Q
F
,F, (in the abseuce of faults).Q
:a,f gf.
[X=
6.I"]
[X'i
c.I"-+ 6.I"
+r.X"')
rlt :de.fr
r.-,[-I
3
-I/][X"
=
b.I][I"'
?
u..X"* r.I]
f
--ac,t [e](o)ti'f[e
leason is action r-r rvhiclr is only'possiblc itr tlie plesenct'of faults. Buteveri if Q
=
I-
alrrl T(Q,II/ + O)? l', t;
rna,Ji no lougel holcl ifonll
sonre of thcfarrlts are present'
(T(Q,V)
f
F),
as belorv.'_lhis is beca.use the faults 0. may lesult irr the state
X"'but
therr action bis only possible in the preseuce of @. The property of faull-monolotticily ts nol
assured
in
this logicor
in
many ot,hel senra.ntical tlieoriesfor
brauching tirne(bisimulatious, testing equivalence, etc).
'Ib
defile a fault-monotonic version of the logic, hou,eveL, lr,e tteecl to first, definc tlie fault-a.ffectecl semantics of the language explicitly. \\re clo so rrsitrg r.elationr;+
for f-a.ffectecl trausitions. rvith r;-+ defirrecl sirnilarll'1e --+ . butnith
one aclditional transition rule:Q
:a,7
pI.
[I '
r.X'+
b.I"]
[I'
=
a,.X"+b.X")
[x,,=
6.r][r"'
-
u.x")
rlt =de.f 7 r.-r
[-I/ - {///]
<P =ae.f ?- €) [X/'/
=
I]
f
:tte.f [e](b)ttancl 1 €
{o,4}
in Table 2E,#E';,i€I
' ''
"=
' .-
lirr allEr?E'
[v](r
){!i^lY}
+
P'F
I't1Ei.iel
E t-+
ll'
(I
e r/orn(f ))4.2
Proving
Fault-ToleranceAny transition w'hich is possible in the abseuce of faults ( ----+ ) is also possible in
their presence (
r;+
). But in a fault-nronotonic versiou of the logic, transit'ionsrvhich are onlg possible in the presence of faults require specia.l attention as t,liey must be tolerated lvherr they occ.ur but, like faults, they catttrot be reliecl upon
to occur. The first step torvards t,his is to retnove negation frorn the logic.
Ite
::=tt
Iff
IZ I
V,rtF.
I
Aierre
| (6).nr | [a]l7eV
::=
lZ' Felllz'
Fe)YF
:::lr
IfJ' lvZ.Y
IpZ.Y I
V,.rf'
I
Arerf'
|(a)r
|[a]r
'Ihe next step is to removethe symrnetry between modalities,so that (cr),|/ is
verifiecl accorciing to the transitions ----+ and [cr]fl according
to
;+;the
latter rvill ensure that such transitions are tolerated and the forurer that they are uot'reliecl upon. Given
f.
the senrautics is belorv (Qllv
F
iff Q €[f]).
[tt]5 =a,1
P
[ff\t
=a,t
a
[zno -a"1 6(2)[Ai.r
4no =a".r f-lier[4nr
[pZ'v\a:a,J
){5'
][V]r'
c
6'](Z)[!;.7
F.no =a'.r Urer[Fi],'.
^[uZ'Yl6:a".r U{6'
| 6/c
[Vn6'](Z)
(3)[(a)f],
:a".1{Pl}r,,,P
4
P'r\t
= 6 A P' e [Fnr][ta]r'I,
:a".1 {PlYp,.(P#
P'
AT:6)
+
P'e
fiflno],Lhis treatutent of modalities colrespouds
to
the rvay the refittetrtt'ttt1tt't'-orcler of \{oclal Process Logic [16] receivecl its nioclal characterisation Il-1].'fhe
rnot,ivatiol there is cliffelent: ----+ a,re transitions of the specification that the
irnpieruentatiou tllust perfornl. and
r;+
are transitions that lllay ol'tlla1'tlot beperforme<I. (N,IPL ancl fault-tolerance are discussed again in Section 6).
Fault-Tolerallce
for Lirnited
Resources
A realist,ic analysis of the tirr.ring properties of a syst'em must take int'o accouttt
the linritatiotrs of the underlying hardware. This is even rnore Ireedecl
if
har<l-ware fa.ilures are
to
be toleratecl. Fault-tolerance recluiresreduudancy
acldi-tional components (hardrvare redundancy), instructions (soft'rvare redundancy)
or executions (tirne reclundancy) and leduudancy requires resollrces and time.
R,esources r-nust be assigned rvhen a fault occurs (e.g. for roliback recovery') aucl
also to enable run-time recovery, e.g. for perioclic checkpointing and for votiug
on t,lie orrtcottte of N-moclular exec-utiotrs.
We shall no*'combine consicleration of lesource iimitat,ions aird faults ancl sho*' ho'w tht' tirning properties of fault-tolerant aucl resourcc*litt-tited s1''st'erlrs
can be analysecl. A nrajor issue, like before, is the allocation of tasks to resources. But now n'e shall use clynamic allocation accortling to the urgeucy of tasks ancl ai.'ailabilitv of resources.
5.1
Proving
Fault-Tolerancefor
Bounded ResourcesAs befolc, let a s1'stem consist of a nurnber of tasks. Ttrsl;,s. sotue of theln lterioclic
alrl
others spora.clic, each rvith its oil'n titner, executed on a cetrtra.lizecl set olresources, Resonrces, including plocessors and protected shared objects. Let a
sclrecluler, Scheduler, ntap tasks into resources in a lvay
tliat
ellstll'estliat
thetiniing constraints Tinting are tnet clespite harclrvare failures
Vrrror,rr"r-( Tc sk s l.Re.so rn' ce sl'9 c h e d'u /er )
\/,
lF*,.".,
",...
T i m i n qTinirtg
nta)'containa
nuntberof
lecluiremetitsbut
rvitlr lirritecl cotttprrtitrgr.esources ancl w'ith llo assurnptions about horv often sPoladic ta.sks at'rive, t<r
satisfy tlrern ntay'llot be possible. But Timittg cottttritis uo uegatiotr (to eustrrer
fault-nolotonicity) and thus cannot e-\pless inrplication. This basic problellr
results frortr
tlie
ua.tureof
verifying the timing propelties of resoulce-ltouutl systems in t.he preseltce of faults. We shall assullte thtr.t resortt'ces, ,flesottlces,al.e rlot shart'd rvith ta.sks lvhich are part of the environtt"teut.. Therefolc the
inter-arrival
tilie
ol tlie sporadic tasks (perhaps iuvoked by these euvirottnreut tasks)*,ill
never cleperrd on fzrilures of these resources. 'fhe solutiolt isthel
to firstverifl' assurnptions
in
the absence of fa.ults(l)
andif
they liolcl tlien to alsovelify' tlansactions in the presence of anticipated faults (|Fs,.""",..").
(TasA's|-Resou'cesl,|cheduler)
\tr l'4sstnnptiotts
thetr( Tns l.s I Re.so rn' ce sl,S c hedzle r ) \.r. Fv,.. " ", "" " T
r t n s u r:l i ott s
5,2
DynamicBest-Effort
SchedulingIn or.cler to nrake decisions after the occurrence of a fa,ult. a scheclulet' tttttst ltavt: irrformation about the resources available at
that
tirtte. I"ol exattrple, collsidet'a fail-stop assumptiou [25] and the actions crashT, aucl repairedp b1' rvhich a
sclreduler. is inforlted of the status of Proctssorp, a.ssrttttitrg that rellair takes time re pntirl:
V.f ntt-rto11
:dt.t
r,.,([f
(t)t
f uitr,.e(repairt).]'][y
'i:l:paire.d6.Ii ir"lt(,r).f
U)])Let the furiction g
I
ll,pro]
- {I, T}
fork €
fl,pro)
returnT if
Proc:essor1, is operative anclI
otherwise (initially so(k)= T).
Then iu orcler touou-pre-eltpt,ively schedule inciependent tasks
in
the preseuce of faults. n'e have the schcclulel tr,\(.f0, So).[X(/, S)=
'"]
where-I(/.s)
=
I1101=.,_ req;.X(f lT li), s)+Lrr o.r(i,.f ),rk /r rt q(.f I A s( kr=r
pr 1r' ( i )'-r ( f lk I il' g )+
Is1r'y=rnr,g ,,!t1.v1 f ailk
'-r(/' y[r/r'])+
Do1* y=tnou,,,s1.v v f (1il r' X (
flL
I'f-'
( A )]'.l[r/k]
)+futur=r
re YttLir'7,'f(f'
g[f/]])
Another consequence of the preseuce of fa.ults is that the static allocation of pliorities t,o tasks is then usually ineffective. Consicler the n'ell-knorvu earliest-dearlline-first (EDF)policy: t,l're closer the task's cleadlint, the higlier its lrliority.
This policy is easy'
to
implement for tasks rvit,lt incliviclual deacllines. Letr/
: [1, spo*per] ---- R1 clenote such deacllines and for all i such that/(i) I I
(i.e . for all invokecl tasks) let ll(r) return the time that, TasA; has beeu irrvokecl; initiallyh0(i)
=
0. \\re introduce a nery prefix operator ctOl.Pe to t'epresetrt the clelaybefore the action c is offered a.ncl assurning {,hat Pe c.ontaius the tirne variabie
t,
rve have the rules[email protected]
feTOlt) and a@1.I'c'tdl
[email protected]+
dltl
126).Finalll', let the preclicate rrr.in(i, f
,h,t)
hold if anrong the susl>eticlt:rl tasks, 7'n.sfri is the closest to violating its tleadline: nztin(zi, f,h,t)
=a,.rf(i) -
T
n(/("r)
:
T +
r1(i)+
A(t)- t <
d(j) +
A(j)
-
l).
Then EDIr carr be implenrentecl by'/rI(/b,
go, ho,[)).[f (/, g,h,t)'
. . .] n'hereX (f ,s,/r,
l)'
I.rrol=,- reqi(01.-r-(/[I li],s,
hltl il,t)+
I/101g1t,t1 re/,:@l'I(/[ L I i]' s' h't)-l
Lu,,,1,..s,o,r1nkt..rns( ! )ns(r,t=r
z'lr
(i)'at 'X ( 'f lk li)' g ' lt 't)I
Ig1u v=. n n g,," 1r1 1 1 f ail x@l'I("f'
clL / k), lt, t )+Irlu
;=.n0.,,,s1 1 yf
ailk@t' x (flL
/ f -r
( k )l'
s[I/]1,
h' l )+Ir1^.1=r [email protected] (f
' g[T /k]. h ' t)
The UDF policy is optinra.l for indepenclent tasks on a, single fault-free
1;ro-cessol a.ucl a besl eft'ort policy in general [23].
5.3
Dynamic
Planning-Based SchedulingA
planning-ltn.serl schecluler, in coutra.st, will onll'schedule a task if its cleacllinescan be guaranteecl. Let each task request a processol by'sencling an upper botrncl
bou.nd(r) on t,lie nurnber of basic machine cycles to cor.rrplet,e a.n invoca.tion
(r
is a pararneter) and let acceptance and rejection oftasks be representeclb1'thc-actions occi and rejr respectively. Tl.ren for sporadic tasks we have:
Taski -4"7
gI.
(licA1 O C)[I'
fnl(r). reqi$ound(r)).(acc1.]-(.r)*
rej;.I)]
lZ(r)'
reto.oul(z).X)A
planning-based schedulerwill
maintain a schecluie of all tasksthat
rvillguarantee their timely cornpletion provided no processors fail in the meanrvhile.
Tlre sclieclule is represettted by the function h : [1 .pro]
-
fl,per]
s,po]* rvhichreturns t,he sequence of t,a.sks that are scheduled to be executed otr each processor'
(l (ft)o is ctrrrently executetl on Processor'1, alld initially lo(lr)
:
e ). In aclclition.n'e apply b
: ll,pet'+
spo)-
,'\r to retuln the upper bouticl on tlie tiuurber ofnrachine cvcles for t,Irt' curreut iuvocation of each active task (initialll'De(i)
=
0).liach tirne a task cornpletes. the next task is t,ahen for execution aud u-hert a nerv t,a.sk arrives, tlie schc<lulel w'ill
try
to accorrrnrodate its executiou in theexisting schechrle. 'I'his is clorre by'looking fol atr operative Pi'ocr.s.sor';. u'hiclt is
fa.st euough to guarantee the additional task's deadline (c is the uulrber of cy'cles
ancl strrn returtrs the srttn of
all
rrurt-rbelsin
tlte seclrieuce): /sl(r.k,h.c)
=a"1(sunr(h(*))*c)*speedl S d(t).The task is acceptecl
rf
such a processor exists. hicase a processor fa.ils, the schedulel lvill try to relocate all its t.asks {br execution
on other operative processors. This, horvever, may not alrvaJ-s succecd and the sclie<luler then t'r'rters a degracle<l nrocle of operation in rvhich tasks n'hich cauuot be accornnroclated rvill be dropperl from t.he execution. Each tinre tliis happens. tlrc a.ctiorr A;g;nAi is perforrttecl, auuottuciug the nurubel of the task.
I("/,9,/,.b)
t
I11ny=_,
reql(c).I1(/,g,h.b.c,i)l
Iylo
1s1t.t1
rel;' X 2(flL
I i)' u' I tUr (.f (i))' I f()l'
6' /( ; ) )+Ioluy=.
f
uilp'X3(f'slLlk)'
l'
ll'r)+
Iu1o1=t
lcTrazr'1'-I(/,glfIk),lt'b)
,\' I ( /. y. lt. b., . i)
=
I-rrr
)-r+
../ -r(i.a .n.,.t rui,.'\'
( [. g. h. l,JaIe1,t)=r'n1"r(i,Ar,h.c) ilrci'X2(f lT li)' s' hlh(k)
:
ilkl'blcli)'
k)Xz(1,s, h, b. A,)
" if
h(k)=
s V /(lr(ft)o)I
TlAe rr -Y(/. lt,h,b) elst Ttrtp(h(k)o).r(/[A/lr(,t)6]. s. lr, b) X:1.f ,g,h, b,,()
' if
h(k)=
e thenI(/,g,
h,b) else X+(f ,9, lr.lr.l'. ft(fr)o)X+(f ,g,/t, b, A, i)
i
I,rrt=rn.lsr(i,r.h,i(r:))x'zU,u,hb(k)'lk,h(l) :
illl'b'l)+
Ir1,
1=t* -.f s r(i,t. h.i,( i) ) de g r nde (i )' X :)(/'
9' h [/r ( f' )' / k)' b' k)xL(.f, g,h,b, k)
"
iJ
h(kJ:
€ v f(h(k)o)*
Tllrerr -\3( /, S. h, b) e I se 1n't 1,(h (k)0 ).f3(./[A'/ir ( t' )6]. a. /r. 6)
,\s n.e can see. the planrring-basccl policl'al;ove u'ill only provirlc guaratrtt't's
il no failure occllls aftel tasks ale allocat,t'cl but n-ill otlteru'ise degladt'glaccftrlll''
if
some tasks cannot be accornmoclat,eci. tlncler sufficientll' stlorlg ;tssuttrptionsit
rr-ray be possible to plovicle guarantees in the presetrce of atil' farrlts, but the issues of feasibility (assurnptions) ancl utilization (r'esoulces)tnal
trtalie such asolrrtion impractical. The graceful ciegradation. ltonever', rvill make
it
possible to share the loacl a.rnoirg the different nodes of a. clistriltut,ecl systettt. ancl to relocatethe tasks for u'liich the deacllines cannot be guaranteed. We havc alreacly shorvu
horv to schedule netu'ork traffic to consicler the urgency' of nressages. A sirnilar
replication of objects and tasks can also be usecl to ensure resiliencl' to uocle aucl
memory failures. Thc issue is then to ensure t,hat tlie replicas are consisteut.
6
Conclusions
To analyse the timing properties cif a distributecl sy'steur, it is essential to cousidcr
the iimit:rtionsof the resources of the. syst,em artrl the wa\'fesourc(.s at'e a.llocatecl
to tasks.'fhe existing forrnal tcchniclues ale eillrel based on the nt:r-xitttal
pat'-a.llelism assrrnrption
or
provicle verl' basic Ineansol
resolving conrpetition forrcsourcesj bv sttrtically assigning priorities to actious.
lf.
in aclclitiou. lrarclrvarefa.ilures ale
to
be consiclerecl. then to staticallv detertuiue the task executiottorclel
is
rrsualll.inappropriate.In
this paper. rve have shou'u horvllie
sirrtpleframework of Timecl CCS can be used for a geueral n-rodel fot' resource-basecl executiols. We have also clemonstratecl the use of different techniques for t'ask
schecluling
-
non-pre-en'rptivt-' and pre-emptive, static ancl clynan'ric, best-effot'tand planning-basecl arrcl show'ecl ho'rv to handle priority'inversiou ancl to
schecl-ule network tra{fic.
Since faults are unplediclable, reasoning about fault-tolera,nce tnust, be
fault-rnonotonic: after proving correctness for a nttmber of faults. correcttress for sotrie
of
thep
must be guaranteecl. Nlost te<:hniques for provable fault'-tolerance al'ebased o1 a sy'nt,actic replcsentation of faults. Using modal p-calculi a.ncl the
acl-ditiolal
trapsitions t,o moclel the effects of faults, we have cletnonstratecl that t'hiscolnlrioll technique rvill not ensule fault-n'ronotonicity. The first step in a solrttiotr
is to clea.rly separat,e design clecisions an<i envirotrmeut assutt-tptions atr<l this rvas
done by provicliug the explicit fault-affected semautics of the process languagtr. '.fhe semantics is usecl in the second step, n'here the logic is refined into its
fault-monotorric versiou using the timecl ancl moclal exteusiotts of the ]lennessy-XIilner'
logic. The logic can verifl' fault-t,olerance an<l lve have deuroustratecl
tliat
it canbe usecl to specify sin-rple trarrsactious.
Our work has been based on the timed extetrsion of CICS, Timed CCIS [26],
and this rl'as chosen as the sirnplest fi'anrework to suit our purposes. TCCS has
beerr
furtliel
extendecl to allorv loose specificatious, in Tinred NloclalSpecifica-tions [7] rvhich follon'\Ioclal Process Logic [16].
It
is possible to rrse N,IPL tospecify ancl ver.ify fault-tolerance [4]. N,IPL and
its
refinetnetrt orclt'r'ing u'oulclalso pern'rit ferver faults tharr tlie maximun.t to occur. apply'ing adrnissible
tran-sitiols
t,o sltecify tlietn.flut
n'ithout separtrtiug design constt'aitrts (tlansitions11-hich are admissible but unnecessary) and ertrriLotttttettt assutlrptions
(tl'arlsi-t,iols
rv|ic|
rnodel faults), N'IPL ca.nnot, rvit,hout risking lealizability problerns[], 2], support refinement t,on'ards an inclea.sing ttumber of faults. As tieu'clesign
clecisions are rnacle ancl tlie neeci for ne'iv ha.rdrvare or the higher reliabilitJ'arisc,
it
rnay be necessary' to tolerate nerv faults that coulcl uot have been a.nticipateclearlier. For untimecl s1'sterns ancl unlirnited resources, this rvas desct'ibecl in [12]:
for tirnecl syster-r'rs ancl limitecl resources. this
will
be subject of a colttpatriotrI)aper. The idea is
to
provide two u.ays of refiuementto
take accoutit of' auincreasing number of anticipated faults: the rich-man's refineuent' proceecls to
tolerate ail anticipated faults,'cleating'new resources rvhenever neecled to
sat-isfy dea,cllines; the poor-man's refinement proc.eeds until the level of redundancy
required exceeds u,hat is available iu the set of resources.
References
t. N{. Ahadi a.ncl L. Lanrport. (lomposing spe<:ifications. --1 (.1 .\[ Tran,sar:t.iorts ort Pto-gramnilr.g [,crngtrrtgcs cnrcl ,Systetns, 15(1):73 132, 1993.
N'|. Abacli, L. Lanrport. ancl P- \\iolper. Rea.lizable anrl unrealizable specificatiols of rea<:tive systclns. Lir'C,J. 372:1-l7. 1989.
3. A.A. Rertossi ancl L.\;. N{ancini. Scheduling algorit,hms for fault-tolerzrn<:e iIr
ltarcl-rr:irl-tinre s-vstems. Rtul-Tine ,9gstetns. T(31229 24i-r' 1994.
.1. A. Borjessorr, Ii.Cl. l,arsen, ancl A. Skou. Generalitv in clesign and compositional
verification usiug TA\,'. Forntal x[ethods in.5y.sttrn Drsiqn.6(3):23!t-258, 19!)5. 5. A. Burls au(l A. Wellings. A computational model for fixed priorit-v scheduling.
In N{. Joseph, r:ditor, Real-Titne ,9ystems: ,9pecification, \|erificot.ion uttl Analysis.
Prent,icc-Hall. 1 9[)5.
6. J. (ia.nrilleri ancl (i. \\'inskcl. C.l(lS rvith prioritl' choice. In.f ortnation artcl (.lorrtPtL-t crti ort. 176:2(i--37. 1 995.
7. [i. Cerans. J.C]. Cioclskesen, ancl Ii.Ci. Larsen. 'l'irnecl mo(lal specificat,ions. lt\-(1,5, 715 253 267,1993.
8. R. ('leravelancl ancl t\'1. IIenness.y. Priorities iu proce,'ss algebras. lnfotntatiort artrl. Corttptttcrtiott, 8T:58 77. 1990.
!). It. Gerber alcl I. l,ee. A resourcc-basecl prioritized bisirnulation for real-tittte
s1's-tcrrrs. 1n/orrrt ati.ort attd (lotn'lttt'lr.ttion, l lil:102 l'12. 1994.
1iJ. J.(j. (loclskesen et a.l. Ep.si,lon - User's ]t[a.n.uol. I)epartrnent of Nlathenratics ancl (.lourputer Scieuce. Ilniversity of Aalborg' 19!]3.
I 1. l,I. Ilennessr, ancl T. Regan. i\ process alge bra for tirned s)'stems. Technical t t:Port.
llniversitv of Sussex. l!191.
12. 'f . Janorvski. Bisimrrlrftion and Fa.ult-Tolercmce. PhD thesis, l)epartment of
('orn-puter Science, ITniversit)' of \\Iarrvick, 1995.
1:1. li. Larsen. Proof s)'stenls for Hennr:ssr'-N'Iilner logic rvitli recrtrsion. l.\ C:'5,
299:21it 230, 1988.
14. Ii. Larsen. NIodal specifications. LN(:'9,407. 1990.
15. K.(i. Larscu. Conte.r:t-DeperuJenl. Bi.simulution Betu:een Pt'occsse's. PlrD thesis.
Ilniversit-v of Edinburgh. Scotlancl, 1986.
16. Ii.Ci. Larsen alcl B. Thornsen. A modal process logic. ln Proc:..'Jrrl .'lrtttttal
'Syrtt-posittrrt on [,ogic in. CotttPtrtt;r,5cienr:e, pagt:s 20i] 210, BB.
1?. X. Liu. ,9pecificatiort nncl I)t:corttltositiort irt (loncurrency. l'hf) thesis, I)t'parttttcnt
of N{athernatics ancl Clontputer Sciencc. I-lnivcrsit}' of Aalborg. 1992'
18. Z. Lil alci X{. Joseph. Transformat,ions of programs for fzmh-toletattt:t. Fortrtal Aspects o.f Contputirtg. 4:442 469, 1{)92.
l g. R. X{ilner. (lornntttniccrt.iott, ctnd (lon,crn'rettcy. Prentice-FIall International, 1.()89.
20. F. Nloller ancl cj. Tofts. A tenrporal calculus of cornm. s-vstems. lN("5, .158. 90. 21. J. Parrow. Subrnoclule constrnction as ecltation solr,ing in CCIS. Tl'tcorL-ticrtl
(lont-puter,9cie.rtce. 68:175 202, 89.
22. P. Pleinevaux. Real-tirne fault toicrant operation of the 802.5 token ring.
Renl-f ime,9yst.enrs,8:79 91, 1995.
23. I{. Ramamritharn. Dynamic priority sc}recluling. In M. Joseph, eclitor, Reol-Ti,nte ,gystcnts: SpeciJicatiort, lierif ctttion a.ncl Analysis. Prentice-Hall, 19!15'
24. A,. Salrvicki antl T. N{iildner. On the algorithniic properties of concrtrrent
pro-granrs. INCl,9. 125. 1981.
25. R.D. Schlichting ancl lf.B. Schneicler. Fail stop processors: An approzrch to
clesign-ing fault-tolera.ut compnting svsterns. A(tll Trans. on (iomP. '9ys'. 1(:1), 1983'
26. Warrg Yi. I Cirlcuftts o.f Real'I'ime ,gystetns. PhD thesis. Depa,rttnent of C)ompttter Scie:nce. Clhalnrers Liniversit]' of Ter:hnologr'. 199I
'l'his a.rtic'k,r!as l)t.oc(.sse(l rrsing tlre LNIi,{ rna.cro Packa.ge rvit}r LLN(lS stvle