Survey on “Classification for Moving Object
Detection and Tracking Using Multiple Sensor
Fusion Architecture”
1
Ankita A. Bhanse, 2S. S. Vasekar
1
PG Student, VLSI and Embedded system, SKNCOE, Vadgaon (Bk), Pune, India 2
Assistant Professor, VLSI and Embedded system, SKNCOE, Vadgaon (Bk), Pune, India
ABSTRACT: Advanced driver assistance systems (ADAS) are systems developed to automate/adapt/enhance vehicle systems for safety and better driving. Safety features are designed to avoid collisions and accidents by offering technologies that alert the driver to potential problems, or to avoid collisions by implementing safeguards and taking over control of the vehicle. So the accurate detection and the classification of the moving object is very difficult task in ADAS system by using multiple sensors. Detection, tracking and classification of different moving object are a rising field in object detection and tracking. The most point of this survey is to introduce an outline of the debate required in the current systems and furthermore recognizing, tracking and characterizing the moving object utilizing the fusion approach. The outline of fusion approach incorporates three distinct sensors like LIDAR, RADAR, and Camera. This fusion approach includes the advantages of Simultaneous Localization and Mapping and Detection and Tracking Moving Object undertaking and lessens the incorrectness.
KEYWORD: ADAS system, intelligent vehicles, sensor fusion, classification algorithms, vehicle detection, vehicle safety.
I. INTRODUCTION
Object detection is performed for ensuring the presence of the object in video frame. The object tracking process is sectioning the interested area from a video frames and maintaining track of its movement and its location. The very difficult part in moving object detection and tracking is identifying the characteristics of unstructured environment, which are inherently uncertain and dynamic environment to avoid this difficulty the following techniques are proposed. They are Advanced Driver Assistance System, SLAM, and DATMO.
Conventional ADAS technology can detect some objects, do basic classification, alerts the driver of hazardous road conditions, and in some cases, slow or stop the vehicle. This level of ADAS is great for applications like blind spot monitoring, lane change assistance, and forward collision warnings. Intelligent vehicles have moved from being a mechanical utilization of tomorrow to an energy district of expansive creative work. ADAS help drivers to perform complex pushing assignments to avoid dangerous conditions. Seeing the earth incorporates the assurance of different sensors to get a point by point depiction of the earth and a correct identification of the objects of interest. Vehicle acknowledgment is made out of two major errands: simultaneous confinement and mapping (SLAM) which makes a guide of the earth while in the meantime restricting the vehicle inside the guide given each one of the estimations from sensors; and DATMO which recognizes and tracks the moving things including the vehicle and evaluations their future direct.
reasons, for example, alignment issues, equipment breakdowns, indeterminate detections and no concurrent checks; or from scene irritations, similar to impediments, climate issues and object moving.
ADAS are a particular kind of wise system. These systems help drivers to perform complex pushing errands to avoid dangerous conditions. The rule objective of an ADAS is to help the driver in a secured course inclusion. Help endeavors include: forewarning messages when dangerous driving conditions are perceived (e.g., possible accidents with automobiles, individuals by walking or distinctive obstacles of interest), institution of security contraptions to direct best in class impacts, self-decision moves to avoid obstructions and thought less driver takes note. There are three essential circumstances of energy for ADAS: roadway, farmland and urban districts.
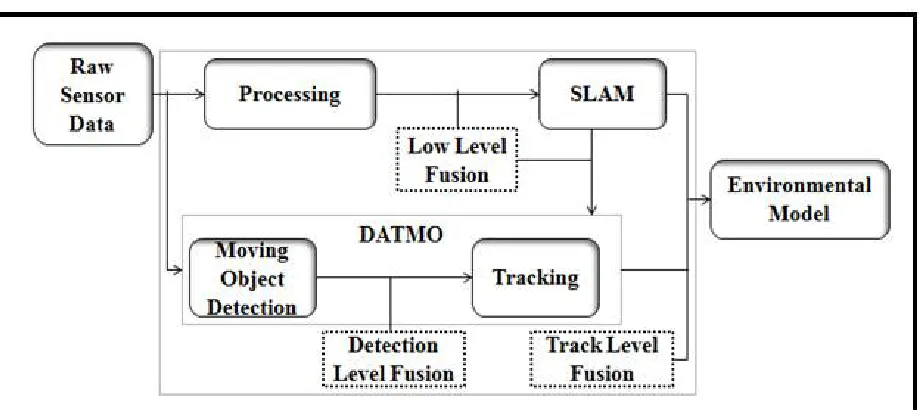
Fig. 1.General Architecture Of The Tracking Task With SLAM and DATMO
Vehicle recognition is made out of two principle undertakings: simultaneous localization and mapping (SLAM) which produces a guide of nature while all the while restricting the vehicle inside the guide given every one of the estimations from sensors; and DATMO which detects and tracks the moving objects surroundings the vehicle and appraisals their future conduct. Knowing the class of objects surroundings the sense of self vehicle gives a superior comprehension of driving circumstances. Classification is viewed as a different errand inside the DATMO assignment or as a total data for the last discernment yield. Be that as it may, classification can enhance the detection organize by including data from various sensor sees of nature. Pummel organize as an illuminated undertaking, and concentrate on the detection, classification and tracking of moving objects. Exactly, to incorporate object's class as the key part of an evidential combination approach that incorporates vulnerability administration from sensor detections. The objective is to enhance the consequences of the observation assignment, i.e., a more dependable rundown of moving objects of intrigue spoke to by their kinematic state and appearance data. In this way, to address the issues of sensor information affiliation, sensor combination for object detection, and tracking.
Fig. 2. Fusion levels inside the SLAM and DATMO segments connection.
II. RELATED WORK
In literature, the problem and the previous techniques of pilgrimage management is described.
Tsai Hong et al. [1], they have concentrated the utility of learning approaches for recognition and following of path markings utilizing visual contributions from a camera mounted before a vehicle. They outlined the upsides of demonstrating spatial setting data through an exception vigorous boosting definition and construing a few varieties in the street scene from the insights of followed model parameters under a static movement demonstrate for the path markings. With no suspicions out and about structure or the movement example of the vehicle, they illustrated a few outcomes on testing sunlight and Evening Street.
Jae KyuSuhr et al. [2], gives the approach an vacant parking slot detection and following framework that wires the sensors of an AVM system and an ultrasonic sensor-based programmed stopping framework. This approach has displayed that 1) stopping opening markings can be effectively distinguished and followed by combining two off-the-rack stopping help frameworks, 2) stopping space markings can be dependably distinguished in AVM picture groupings by consolidating successive discovery comes about, 3) inhabitance of stopping space can be effectively grouped by regarding every stopping space district as a cell of an inhabitance network, and 4) stopping space markings can be followed powerful against extreme impediments by combining an AVMimage and odometry in the DCM score level.
location step, a binocular camera framework is utilized for snag identification as the vehicle is turning around. Utilizing uniqueness calculation and triangulation, we can get all items' separate data in the back of the vehicle. In the snag following and acknowledgment step, the system of molecule channel furthermore, the inadequate representation are utilized to track and distinguish the fundamental snags. At long last, the vehicle turning around speed control calculation is proposed to control the electronic throttle opening furthermore, programmed braking to maintain a strategic distance from impacts.
Johannes Pallauf et al. [5], discuss the outcomes exhibit a sensor display adjusted to three broadened approximations of the multiobject Bayes channel based on limited sets in a dispersed person on foot following situation. The examinations demonstrate the best outcomes in reenactments and genuine information for the CPHD channel as far as cardinality estimation what's more, in this manner additionally the OSPA blunder including limitation blunders with ground truth given by a movement catch framework. Moreover, the proposed versatile demonstrating of likelihood of identifications enhances the state estimation. The likelihood of identification depends not just on the inhomogeneous sensor attributes, additionally on communication with the earth counting dynamic articles, which can be demonstrated to a certain degree utilizing a molecule representation, which was appeared in specific in an introduced system of conveyed sensors with inhomogeneous fields of view.
D. Santos et al. [6], they propose a common detection framework for detecting three important classes of objects in traffic scenes. The proposed framework introduces spatially pooled features as a part of aggregated channel features to enhance the feature robustness and employs detectors of three important classes to detect multiple objects. The detection speed of the framework is fast since dense features need only to be evaluated once rather than individually for each detector. To remedy the weakness of the VJ framework for object classes with a large intra-class variation, we propose an object sub categorization method to improve the generalization performance by capturing the variation.
R. O’malley et al. [7], they novelreal-time dynamic vehicle detection and tracking algorithm our ALV. A novel likelihoodfield- based vehicle estimation demonstrate, joined with our recently altered Scaling Series calculation, is proposed to gauge the stances of the vehicles. It can actually deal with the circumstance where the dynamic vehicles are completely blocked by other questions in the xy plane however can even now be distinguished by our Velodyne LIDAR. Also, keeping in mind the end goal to distinguish these dynamic vehicles impeded by different articles, an enhanced two-dimensional virtual sweep is proposed. At last, these distinguished element vehicles will be followed utilizing our enhanced Scaling Series algorithm coupled with a Bayesian Filter (SSBF) in element foundation urban situations. Both quantitative and subjective examinations on the KITTI datasets and the Teledyne information gathered by our own ALV approve the execution of our dynamic vehicle location also, tracking algorithm.
F. Garcia rt al. [8], proposed a powerful human tracking system in a moving camera. The proposed framework successfully incorporates the human locators and V-SLAM structure to move the people in 3-D space, trailed by an inventive 3-D based CMK tracking, which locally relates the objectives as well as all around upgrades the relationship as per the 3-D data. Such framework can be viewed as a key segment for high level applications, for example, video analysis in a vast size of mobile network. .In addition, the proposed system can likewise be further connected to different class of on-street objects if the comparing detectors are available.
III. MOVING OBJECT DETECTION
Sensors are assumes a vital part in distinguishing proof and tracking the voyaging object. This included two critical assignments. They are SLAM and DATMO. Notwithstanding this the utilization a fusion approach which lessens the inadequacies and enhance the execution of the SLAM AND DATMO errand. Hammer produces a guide on the earth for find the moving and static objects. LIDAR data added to this and produces a 2D occupancy grid map. By utilizing this there is simplicity to distinguish the moving and static objects independently.
A. CAMERA SENSOR
It is most utilized sensor. This is utilized as a part of different mechanical technology and observation system. Camera sensor diminishes the issue in recognize the development of both the sensor and object by consolidating the both movements in the single camera. Yet, the issue of this sensor is that camera covers just the forward and in reverse developments. Consequently it produces an issue in edge developments.
B. LIDAR SENSOR
The LIDAR (Light Detection and Ranging) scanner is the most important sensor as the principle sensor in such course of action because of its high affirmation and exactness to identify obstructions. The fundamental objective of the LIDAR handling is to get precise estimations of the state of the moving deterrents before the vehicle. Vehicle's area is recognized by most extreme probability approach. the emphasis on distinguishing the contrary qualities amongst free and involved cells inside the lattice delineate incrementally building such guide. In the event that an involved measurement is distinguished on an area already set as free, then it has a place with a moving object. In the event that a free estimation is seen on an area already possessed then it most likely has a place with a static object. Utilizing a separation based bunching process the distinguished cloudiness of cells that could have a place with moving objects. This procedure gives data about the obvious state of the conceivable moving object, an estimation of its size, and the separation to the object. Estimations identified as parts of a moving object are not used to refresh the guide in SLAM.
C. RADAR SENSOR
The radar sensor utilizes a settled instrument to recognize moving obstructions. The rundown of targets is conveyed as contribution to the recognition approach. Every component of the rundown incorporates the range, azimuth and relative speed of the identified target. The sensor will create an objective for each object with a vital radar cross section. Be that as it may, targets may compare to static objects or other moving snags, delivering fake positives. Likewise, slight objects like people on foot can't generally be distinguished, subsequently of delivering miss-detections.
IV. CLASSIFICATION OF MOVING OBJECT
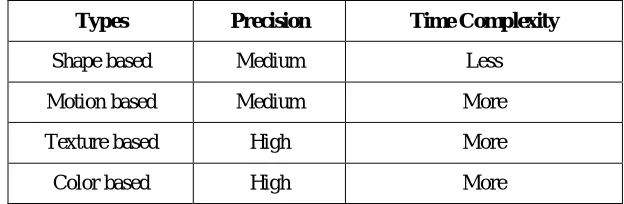
Classification implies separate the moving object from each other. Numerous classification techniques are Silhouette, Template Based Classification, Naive classification, classification in light of shape, classification in view of movement, classification in view of shading, Texture based classification. The beneath table 1.explaind about the diverse sorts of classification their accuracy and time intricacy. Utilizing this table we can look at the execution of the diverse sorts of classification.
Table 1: Different sorts of classification ordered in view of its accuracy and time multifaceted nature. Types Precision Time Complexity
Shape based Medium Less
Motion based Medium More
Texture based High More
From the above table we comprehend the different types of classification in term of shape, motion texture, and color are shown.
A. LIDAR SENSOR
The initial segment of the classification utilizing LIDAR sensor data is utilized to break down the state of the identified moving objects. The class of the object is induced from the size and settled fitting-demonstrate approach. It incorporates no exact classification should be possible in view of the impermanent perceivability. The position and size of the object is acquired by measuring the identified objects in the 2D inhabitance matrix delineate.
B. CAMERA SENSOR
To acquire an appearance based data accumulated from camera pictures. LIDAR detection handle gives a set of ROI (Region of Interest) which we utilize potential outcomes for era. For hypothesis of confirmation, we utilize the constructed disconnected classifiers to characterize the distinctive objects. The camera-based classification creates a few sub districts inside every ROI to cover numerous conceivable scale and size arrangements. Here and there a ROI can contain more than one object of intrigue. When we have gotten the object classification for every ROI, we create a fundamental conviction task.
C. RADAR SENSOR
The classification depends on the speed of the moving objects. Radar targets are considered as preparatory moving object detections. Accordingly, to acquire the object's class we utilize the relative target speed conveyed by the sensor. Speed edge is measurably evaluated utilizing recorded information from the slowest situation for vehicles, urban zones. From the above table we comprehend the diverse sorts of classification fit as a fiddle, movement surface, and shading.
V. FUSION ARCHITECTURE
Fusion approach implies combining the data from the distinctive sensors. LIDAR sensors give a position and state of the specific object. Camera sensor gives a picture of nature. RADAR sensor gives a speed of the object. Every one of those data is related utilizing fusion approach. So there is a change of the effectiveness in detection and tracking and in addition classification.
There are two specific fusion levels: tracking level and detection level. The fusion at tracking level represents the classical fusion approach followed by most of the fusion solutions inside the intelligent vehicles field. The general architecture of our fusion approach at tracking level taking into account a generic number of sensor inputs. In this architecture, object detection and tracking are performed prior to the fusion technique. After tracking, class information is extracted to enrich the object representations in the single-sensor list of tracks. Afterwards, fusion is performed between the single-sensor lists of tracks. Although classical fusion architecture is followed, as an enhancement, the class information is included in this level to enrich the final object representation and to improve the tracking of the moving objects.
VI. CONCLUSION
In this paper, Moving object detection, tracking and classification methods are talked about. The points of interest and drawbacks of numerous strategies are clarified. This approach find, way and characterize the moving objects of Car, Truck, Pedestrian and bicycle. Moving object detection, tracking and classification are utilized as a part of wide assortment of zones like activity, shopping centers, transport stops, railroad stations, and mechanical technology and so on. By utilizing numerous sensor fusion approach there is lessening for the issues in essential methods. Classification likewise effortlessly performed by the fusion approach.
REFERENCES
[2]. Jae KyuSuhr, Member, Ieee, And HoGi Jung, Senior Member, IeeeSensor Fusion-Based Vacant Parking Slot Detection And Tracking Ieee Transactions On Intelligent Transportation Systems, Vol. 15, No. 1, February 2014.
[3]. Matthias Schreier, Volkerwillert, And Jürgen Adamy Compact Representation Of Dynamic Driving Environments For Adas By Parametric Free Space And Dynamic Object Maps Ieee Transactions On Intelligent Transportation Systems, Vol. 17, No. 2, February 2016
[4]. Zutao Zhang, Member, Ieee, Hong Xu, Zhifeng Chao, Xiaopei Li, And Chunbai Wangm A Novel Vehicle Reversing Speed Control Based On Obstacle Detection And Sparse Representation Ieee Transactions On Intelligent Transportation Systems, Vol. 16, No. 3, June 2015 1321.
[5]. Johannes Pallauf, Jörg Wagner, And Fernando Puente León, Senior Member, IeeeEvaluation Of State-Dependent Pedestrian Tracking Based On Finite SetsIeee Transactions On Instrumentation And Measurement, Vol. 64, No. 5, May 2015
[6]. D. Santos And P. L. Correia, “Car Recognition Based On Back Lights And Rear View Features,” In Proc. Ieee Workshop Image Anal. Multimedia Interactive Serv., 2009, Pp. 137-140.
[7]. R. O’malley, M. Glavin, And E. Jones, “Vehicle Detection At Night Based On Taillight Detection,” In Proc. Int. Symp. Veh.Comput. Syst., 2008, Pp. 128-135.