Wave scattering from a rough surface: Solution
by an iterative method
Guy Tsabary
a, Yehuda Agnon
b,*a
Department of Mathematics, Technion, Haifa 32000, Israel
b
Department of Civil and Environmental Engineering, Technion, Haifa 32000, Israel
Received 26 April 2006; received in revised form 27 March 2007; accepted 28 March 2007 Available online 25 April 2007
Abstract
Two iterative solutions of the Helmholtz equation for a scalar field inR3above a rough surface that admits the Dirichlet boundary condition are derived. The bases for the two iterative methods are two different boundary integral equations that represent the solution. The first integral equation is classified as a Fredholm integral equation of the first kind. The second is classified as a Fredholm integral equation of the second kind. This classification suggests that it is easier to find stable solution methods to the second equation. In both methods, the boundary integral was separated into a major part which is easy to calculate and a local residual part. The major part is a convolution and thus can be calculated using FFT in com-plexity O(NlogN), whereNis the number of surface points in which the surface height and its first derivatives together with the incoming wave and its normal derivative are all known. The residual element of the equations can be approxi-mated efficiently only for surfaces where their amplitude is less than the wavelength of the incoming wave. The iterative schemes were tested numerically against a reference solution in order to examine the applicability range, the error estima-tion and the stability of the schemes. All tests supported the superiority of the second method. In particular the error esti-mation and stability tests indicated good performance for surfaces with slope up to 1. Yet, being an equation in the scattered field alone, makes the first method useful as a benchmark solution in its domain of applicability.
2007 Elsevier B.V. All rights reserved.
Keywords: Rough surface; Scattering; Helmholtz equation; Fast Fourier transform; Three-dimensional; Dirichlet to Neumann
1. Introduction
The subject of rough surface scattering has been studied by many methods. Extensive surveys are given in
[44,12]. This paper applies two numerical iterative schemes, each developed from an integral equation
formu-lated for scattering of scalar waves from rough surfaces, subject to a Dirichlet boundary condition. This cor-responds to physical problems such as scattering of acoustic waves from an acoustically soft surface or scattering of electromagnetic waves from a perfect conductor in homogeneous media, where the vectorial formulation of electromagnetic waves can be decomposed into scalar formulations.
0165-2125/$ - see front matter 2007 Elsevier B.V. All rights reserved. doi:10.1016/j.wavemoti.2007.03.006
* Corresponding author.
E-mail address:[email protected](Y. Agnon).
These methods could be classified asSmall slopes methodsin the sense that the surface slope should be less than unity.
The highest efficiency is achieved in the region jSj60:1 minf1; 1
kAg where Ais the surface amplitude:
A= 0.5(max{g}min{g}) and k is the wave number modulus: k¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi kxi2þkyi2þkzi2 q
. Beyond this region the complexity increases somewhat: The multiplication factor implied by O(NlogN) is increased from few FFT evaluations to dozens or few hundreds FFT evaluations in the conducted test cases.
The range of validity of the methods presented here exceeds the range of high frequency methods such as Geometrical Optics[17]and[3, pp. 13–21]andKirchhoff approximation[18,23]. They compare favorably other methods such asSmall Slope approximation [16,23] and[43, p. 69],Perturbation expansion [3,20]and more recently[33],Composite-scale[9,38,42,9],Operator expansion[29,30,7] andRayleigh Fano[40,14].
When compared with its closer relatives namely the numerical methods described by Warnick [44, p. 11]
and on, it exhibits better complexity than the Method of moments[39,24] as well as other iterative methods
[27,28,21,11,45].
Perhaps the closest relative numerical methods, are FFT methods. The basic idea is to utilize the high efficiency of the FFT algorithm in performing convolutions, thus reducing the complexity from O(N2) to O(NlogN). The Sparse-Matrix Canonical-Grid (SMCG) method was developed by Li et al. [26,2,46]. The scattering matrix is split into a strong part that consists of near-neighbor interactions and a weak part that consists of all the rest. An iterative scheme such as the conjugate gradient method is adopted to solve the matrix equation. The strong matrix is sparse and can be easily handled. However, the weak interactions require the multiplication of the dense weak matrix with successive iterations and could therefore present a major computational bottleneck. To speed up such calculations, the concept of canonical grid (CG) is intro-duced. The essential nature of CG is that it is translation invariant. In rough surface scattering problems, the CG is usually taken to be the mean flat surface. By translating the unknowns to the CG, the weak interactions can be performed simultaneously for all unknowns using FFT. This reduces memory requirements from O(N2) to O(N) and operation counts from O(N2) to O(NlogN).
The Adaptive Integral method(AIM) [4,1,32] separates near and far field interactions when evaluating a matrix-vector multiplication. To compute far-field interactions, sources supported by the scatterer are pro-jected onto a regular grid by matching their multipole moments (up to a certain order) to guarantee the approximate equality of their far fields. Next, the fields at other grid locations produced by these grid-pro-jected fields are evaluated by a convolution. Knowledge of these fields permits the computation of fields on the scatterer through interpolation. The projection and interpolation operators are represented by sparse matrices, while the convolution can be calculated using an FFT. Unfortunately, the near fields radiated by these grid fields do not match those radiated by the original sources. Therefore, near-field interactions are eval-uated directly, and corrected for errors introduced by the far-field operator.
The Precorrected-FFT method (P-FFT) was introduced by Phillips and White [36,34,35,31]. It further improves the performance of AIM by making the appropriate transformation back from the computational mesh to the physical panels. These methods are most powerful in solving volume scattering problems.
In the present method, a residual equation is established in order to treat the local (near-zone) interactions. This approach clarifies to what extent the near-zone interactions are really local and how good the far-zone operator approximates the integral operator. Thus, it enables a development of far-zone approximations which renders the remainder term increasingly local. Moreover, validity and applicability conditions are straightforward to conclude.
Our approach follows that of[6,13]who used it to solve Laplace’s equation in a water wave problem. Here their approach is extended to solving the case of three-dimensional the Helmholtz equation for rough surface scattering.
1.1. Formulation of the scattering problem
The following notation is adopted: Arrows denote vectors (e.g.~r) and capital letters to denote matrices (e.g. A). The subscript i, s, andgare related to the incident wave (e.g.~ki), the scattered wave (e.g.~ks); and to the rough surface (e.g.~kg), respectively.
Consider the three-dimensional scalar wave functionWð~r;tÞ that satisfies the scalar homogeneous wave equation:
c2r2o 2
ot2
Wð~r;tÞ ¼0
above a rough surface.~r¼ ðx;y;zÞ,cis the wave propagation velocity and$2is the Laplacian.
With the usual separation of variables process, we look for solutions with harmonic time dependence:
Wð~r;tÞ ¼Uð~rÞeixt:
Let the incident wave be a plane wave:Uið~rÞ ¼eiðk
x
ixþk
y
iyþk
z
izÞ
From now on Uð~rÞ(or rather its normal derivative) is our main concern. This spatial part satisfies the homogenous Helmholtz equation,
ðr2þk2ÞU¼0
and we term it either the wave or the field.
It is assumed that a plane wave is incident from above, upon a rough surfaceoD. The mean location of the surface is atz= 0. The cartesian coordinates (x,y,z) are chosen such thatxandyare horizontal coordinates (spanning the mean surface) andzis upward directed vertical coordinate (normal to the mean surface). The surface (i.e the total reflector boundary) height is represented by a continuously differentiable functiong(x,y) and imposes the Dirichlet BC (Boundary Condition)Ui(x,y,g) =Us(x,y,g) onoD
The mathematical problem to be solved is:
Problem 1. Find a complex valued functionUs(x,y,z) that is
(1) Twice differentiable above the rough surfaceoD.
(2) Satisfies Dirichlet BC:Us=UiwhereUiis a solution of the Helmholtz equation. (3) Us satisfies Sommerfeld radiation condition in the far zone:
limz!1x oUs
ox þy
oUs
oy þz
oUs
oz ikrUs¼0;
The existence and uniqueness of such a solution is proved, for example by Colton[8], Section 3.
The basic tool we use are integral representation theorems.
In the problem with Dirichlet boundary conditions, we may first determine the surface values of the normal derivative of the scattered field,oUs
on. Here, o
on¼~nr~F with~nthe outward unit normal andr~F the gradient of
F. This can be accomplished from the knowledge ofUsvalues that are determined by the Dirichlet BC. There-fore the following equation is a Fredholm integral equation of the first kind:
The uniqueUsthat solveproblem 1, satisfy on the surface
Us 2 ð~rÞ ¼
Z
oD oG
on0ð~r~r 0ÞU
sð~r0Þ Gð~r~r0Þ
oUs
on0ð~r 0Þ
ds0 8~r2oD; ð1Þ
whereGðx;y;zÞ ¼ eik ffiffiffiffiffiffiffiffiffiffiffiffi
x2þy2þz2
p
4ppffiffiffiffiffiffiffiffiffiffiffiffiffiffix2þy2þz2 is the free space Green’s function for the Helmholtz equation and ds
0is the
dif-ferential area element.
A second kind Fredholm equation can be developed with the additional requirement that restrict the inci-dent wave to be a plain wave, see[19, pp. 1121–1123].
1 2
oU onð~rÞ ¼
oUi
on ð~rÞ Z
oD oG
onð~r~r
0ÞoU on0ð~r
0Þds0 8~r2oD: ð2Þ
In the following two Sections 2, 3we develop the iterative schemes for solving Eqs. (1) and (2), respec-tively. These are the main results of this paper. Thereafter in Section 4.1 we develop numerical tests to determine the methods’ stability in the presence of noise and the schemes’ expected error. In Section 5
we develop a similar method to determine the cross-section of the scattered field. Section6 outline the tests that were run in our Matlab programs (to be found in [41]), together with representative results. Conclu-sions are in Section 7.
2. Fredholm equation of the first kind
In this section we introduce the iterative scheme for solving Eq.(1). It is a Fredholm equation of the first kind which is known to be ill conditioned[10, Chapters 12–13],[19, p. 1122]and[5]. Nevertheless, by trans-ferring the equations to the frequency domain, we could avoid the matrix inversion and hence improve con-vergence and stability of our scheme. Although the results in Section 6 indicate the superiority of our 2nd method (based on Eq.(2)), there is at least one significant advantage in solving this equation: It is an equation in Us and its normal derivative alone. This makes it useful for obtaining benchmark solutions.
ConsiderNgrid points on the rough surface. In solving scattering with a Dirichlet BC, the unknown in solving Eq.(1)is the scattered wave normal derivativeoUs
on on the surface. ItsNvalues should therefore be
cal-culated from the knowledge ofUs,g,oogx,oogyat theNgrid points on the surface. Following Clamond et al.[6], we reformulate Eq. (1)using the following symbols:
(1) Primed variables are used in integrals.
(2)~R¼ ðx;yÞis the two-dimensional projection of~ron the xy-plane. (3) rh~g¼ ðog
ox; og
oyÞ, is the horizontal gradient ofg.
(4) N~¼ ðog ox;
og
oy;1Þ ¼~n
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi 1þ ðog
oxÞ
2
þ ðog oyÞ
2 q
denotes a (non-unit) outward normal vector.
(5) o
oN ¼
o on
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi 1þ ðog
oxÞ
2
þ ðog oyÞ
2 q
¼ og ox o
ox
og oy o oyþ
o
og, is directional differentiation with respect to~N.
(6) Vs¼ooUNs,Vi¼ooUNi. For simplicity,Vswill replaceooUns as the unknown in the equation.
(7) r¼ j~r~r0j ¼ ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðxx0Þ2þ ðyy0Þ2þ ðgg0Þ2
q
and R¼ j~R~R0j ¼ ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðxx0Þ2þ ðyy0Þ2
q
are the dis-tances between two 3D and 2D points, respectively.
(8) Gð~r~r0Þ ¼eikr
4pris the Green’s function.
(9) S¼gð~RÞgðR~0Þ
j~RR~0j is the slope between two points on the surface. Note thatr¼R
ffiffiffiffiffiffiffiffiffiffiffiffiffi 1þS2 p
.
The reformulation of Eq. (1)is thus:
1 2p
Z Z
oDxy
V0seikR
R dx
0dy0¼ U
sþ
1 2p
Z Z
oDxy
4pgoG oN0U
0
sdx0dy0þ
1 2p
Z Z
oDxy
4p oG oN0
goG
oN0 !
U0
sdx0dy0
1
2p
Z Z
oDxy
V0seikR
R
eikRðpffiffiffiffiffiffiffiffi1þS21Þ
ð1þS2Þ12
1
" #
dx0dy0: ð3Þ
Notice that this reformulation illustrates the idea of the method: Addition and subtraction of the boundary
integrals with integrand terms foG oN0,
V0 seikR
R . These are nonlocal terms that are, nevertheless, easy to calculate. On
the other handðoG
oN0fooNG0Þand½e ikRð ffiffiffiffiffiffi1þS2
p
1Þ
ð1þS2Þ12
1are local residual terms, that can either be ignored or reduced to a
smaller linear system. We shall see that if jSj 1 foG
oN0 and
V0seikR
R dominate oG
oN0 and
V0seikr
r , respectively, and the
To constructfoG
oN0, notice that G has the following power series expansion in S:
4pG¼ e
ikRpffiffiffiffiffiffiffiffi1þS2
Rpffiffiffiffiffiffiffiffiffiffiffiffiffi1þS2
e
ikR
R XM
m¼0
amSm¼
XM
m¼0 eikR
Rmþ1 Xm
n¼0
amngng0 mn
;
wherefoG
oN0 is defined by:
4poG oN0
XM
m¼0
og 0
ox0 o eikR
Rmþ1
ox0 og0 oy0
o eikR
Rmþ1
oy0
0 @
1 AXm
n¼0
amngng0 mn
þS e
ikRpffiffiffiffiffiffiffiffi1þS2 R2ð1þS2
Þ32
ik e ikRpffiffiffiffiffiffiffiffi1þS2 Rð1þS2Þ
!
XM
m¼0
r0hðg 0Þ r0
h
eikR
Rmþ1
Xm
n¼0
amngng0 mn
þ e
ikR
R2 XM
m¼0
cmSmþ1ik
eikR
R XM
m¼0 bmSmþ1
!
¼ X
M
m¼0
r0 hðg
0Þ r0 h
eikR
Rmþ1
Xm
n¼0
amngng0 mn
þX
M
m¼0 eikR
Rmþ3 Xm
n¼0
cmnðgnþ
1
g0mngng0mnþ1
Þ
ikX
M
m¼0 eikR
Rmþ2 Xm
n¼0
bmnðgnþ
1
g0mngng0mnþ1
Þ 4pgoG
oN0; ð4Þ
whereMis preferably chosen small in order to avoid round off error, since in the above analysis we expressed the bounded variableSmas a quotient of two variablesSm¼ðgg0Þm
Rm . These vanish at (x0,y0) = (x,y) and
there-after insert big terms such as 1
q2
z,amn.
In what follows we restrict ourselves to the caseM= 0 andS< 1 all over the boundary so that the Tailor series expansion is an adequate choice in the above definition offoG
oN0. With this choicea00=b00=c00= 1 and all the other coefficients vanish so we have:
4pgoG oN0¼
og0 ox0
oeikR
R ox0
og0 oy0
oeikR
R oy0 þ
eikR
R3 ðgg
0Þ ikeikR
R2 ðgg
0Þ: ð5Þ
Eq. (3) and the preceding details suggests a natural decomposition of Vs into three terms Vs¼Vs1þVs2þVs3:
1 2p
Z Z
oDxy
V0s 1e
ikR
R dx
0dy0¼ U
sþ
1 2p
Z Z
oDxy
4pgoG oN0U
0
sdx
0dy0; ð6Þ
1 2p
Z Z
oDxy
V0s 2e
ikR
R dx
0dy0¼ 1
2p
Z Z
oDxy
4p oG oN0
goG
oN0
!
U0sdx0dy0; ð7Þ
1 2p
Z Z
oDxy
V0s 3e
ikR
R dx
0dy0¼ 1
2p
Z Z
oDxy
V0seikR
R
eikRðpffiffiffiffiffiffiffiffi1þS21Þ
ð1þS2Þ12
1
" #
dx0dy0: ð8Þ
Here Vs1 is the dominant term of Vs, Vs2 is the local contribution and Vs3 is the residual term which is defined implicitly hence calculated iteratively.
Vs1,Vs2andVs3are all approximated by applying FFT on their defining equations. We then make use of the approximate convolution theorem:
Leth(x0,y0) be a periodic function inoD
xyandg(xx0,yy0) with continuous second derivative such
that its Fourier transform exists, then
1 2p
Z Z
oDxy
gðxx0;yy0Þhðx0;y0Þdx0dy0FFT1fbgFFTfhgg: ð9Þ
A method to adapt this approximation to the aperiodic nature ofg(xx0,yy0) is outlined at Numerical
2.1. Calculation of Vs1 (the first order approximation of Vs)
Vs1 is calculated via FFT operation on Eq.(6). Using approximation(9), the left hand side becomes:
FFT 1
2p
Z Z
oDxy
V0s 1e
ikR
R dx
0dy0
( )
de
ikR
R FFTfVs1g ¼ i
qzFFTfVs1g:
Here we used the well known Fourier transform of G: Gbðkx;ky;zÞ ¼ie
izqz
4pqz in the limitz= 0.
In order to approximate the FFT of the right hand integral, one first needs a general equation fordeikR
Rnþ1. This is achieved using the recursion formula
c eikr
rn ¼ i
d
oeikr
rnþ1
ok !
¼ i o
ok deikr
rnþ1 !
;
so that
d eikR
Rnþ1 ¼i Z
lim
r!R
c eikr
rn
! dk¼i
Z deikR
Rn
! dk:
With the proper integration constants, one gets:
d eikR
R2 ¼i Z i
qzdk¼ lnðkþqzÞ; d
eikR
R3 ¼ i Z
lnðkþqzÞdk¼ iklnðkþqzÞ þiqz;
which is sufficient for theM= 0 case.
Now, under the assumption of a common horizontal wavenumber of the surface and the incident wave we can use approximation(9) in the right hand integral of Eq.(6):
FFT 1 2p
Z Z
oDxy
4pgoG
oN0U0sdx0dy0
( )
kx
qz
FFT og 0
ox0U
0
s
ky
qz
FFT og 0
oy0U
0
s
iqzFFTfg0U0sg þigqzFFTfU0sg: ð10Þ
Note that here the relation ondgoð~xr~0nr0Þ
m ðkx;kyÞ ¼ ðiÞ
n
knmbg was used, which is equivalent to the more standard
relation ocoxngn
mðkx;kyÞ ¼i
nkn
mbg, since o
ox0¼ oðxox0Þ.
The result of this subsection can finally be summarized as:
FFTfVs1g iqzFFTfU 0
sg þikxFFT
og0 ox0U
0
s
þikyFFT og0 oy0U
0
s
q2zFFTfg0U0
sg
þqzFFTfgFFT1fqzFFTfU0sggg: ð11Þ
However, the right side is not periodic in kspace, so that Gibbs phenomenon will emerge as soon as we calculateVs1 using FFT
1 .
2.2. Calculation of Vs2 (the second order approximation of Vs)
Similarly, to isolateVs2from(7)we perform FFT on the entire equation, using(9)for the left hand side and limR!0ð
ð~R~R0Þr0
hg
0
R
gg0
R Þ ¼
R
2
o2g
iFFTfVs2g qz
¼FFT 1
2p
Z Z
oDxy
eikR gg 0
R3
ð~R~R0Þ r0 hg
0
R3 !
eikRð ffiffiffiffiffiffiffiffi1þS2 p
1Þ
ð1þS2Þ32
1
" #
U0sdx0dy0
( )
þFFT 1
2p
Z Z
oDxy
ikeikR ð~R~R 0Þ r0
hg 0
R2
gg0
R2 !
eikRð ffiffiffiffiffiffiffiffi1þS2 p
1Þ
ð1þS2Þ 1
" #
U0sdx0dy0
( )
ð12Þ
FFT 1
2p
Z yþD2y
yD2y
Z xþDx
2
xDx
2
eikR 1 2RUsð0Þ
o2g oR2ð0Þ
eikRðpffiffiffiffiffiffiffiffi1þS21Þ
ð1þS2Þ32
1
" #
dx0dy0 (
þ 1
2p
Z yD2y
yAy
þ
Z yþAy
yþD2y
! Z xþAx
xAx
þ
Z yþD2y
yD2y
Z xDx
2
xAx
þ
Z xþAx
xþDx
2 !
" #
eikR
R2
gg0
R
ð~R~R0Þ r0 hg
0
R !
eikRðpffiffiffiffiffiffiffiffi1þS21Þ
ð1þS2Þ32
1
" #
U0sdx0dy0 )
ð13Þ
FFT 1
2p
Z yþD2y
yD2y
Z xþDx
2
xDx
2
ikeikR 1
2Usð0Þ
o2g oR2ð0Þ
eikRðpffiffiffiffiffiffiffiffi1þS21Þ 1þS2 1
" #
dx0dy0 (
þ 1
2p
Z yD2y
yAy
þ
Z yþAy
yþD2y
! Z xþAx
xAx
þ
Z yþD2y
yD2y
Z xDx
2
xAx
þ
Z xþAx
xþDx
2 !
" #
ikeikR
R
ð~R~R0Þ r0 hg
0
R
gg0
R !
eikRðpffiffiffiffiffiffiffiffi1þS21Þ 1þS2 1
" #
U0sdx0dy0 )
; ð14Þ
whereAxandAyare chosen as small as possible thus utilizing the locality ofðooNG0fooNG0Þ. Later in this chapter we will show how to choose them adequately. Integrals(13) and (14)were separated according to their singu-larity. Following Macaskill and Kachoyan in[27, Appendix A], one can show that integral(12)can be approx-imated at first order as:
Z yþD2y
yD2y
Z xþDx
2
xDx
2
eikR 1
2RUsð0Þ
o2g oR2ð0Þ
eikRðpffiffiffiffiffiffiffiffi1þS21Þ
ð1þS2Þ32
1
" #
dx0dy0I1
13ðq1Þ I113ðQ1Þ þI213ðq1Þ I213ðQ1Þ; ð15Þ
where
I113ðFÞ ¼
Z Dy
Dx
Dy
Dx
Usð0Þsin kDxF
2
g
xxþv21gyyþ2v1gxy
kF4 dv1;
and
I213ðFÞ ¼
Z Dx
Dy
Dx
Dy
Usð0Þsin kDyF
2
v2
2gxxþgyyþ2v2gxy
kF4 dv2;
with
v1¼y
x; q1ðv1Þ ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ð1þg2
xÞ þv
2
1ð1þg2yÞ þ2v1gxgy
q
; Q1ðv1Þ ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffi 1þv2 1 q
;
v2¼x
y; q2ðv2Þ ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ð1þg2
yÞ þv22ð1þg2xÞ þ2v2gxgy
q
; Q2ðv2Þ ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffi 1þv2 2 q
:
Similarly, the first order approximation of integral(14)yields:
Z yþDy
2
yD2y
Z xþDx
2
xDx
2
ikeikR 1
2Usð0Þ
o2g
oR2ð0Þ
eikRðpffiffiffiffiffiffiffiffi1þS21Þ
1þS2 1
" #
dx0dy0I1
where
I114ðFÞ ¼
Z Dy
Dx
DDyx
Usð0Þ 1 kF sin
kDxF 2
Dxcos kDxF 2
g
xxþv21gyyþ2v1gxy
F3 dv1;
and
I214ðFÞ ¼
Z Dx
Dy
Dx
Dy
Usð0Þ 1 kF sin
kDyF 2
Dycos kDyF 2
v2
2gxxþgyyþ2v2gxy
F3 dv2:
Having established the way for calculatingVs1 andVs2, let us calculateVs3.
2.3.Vs3 calculation and the total normal derivative Vs
The definition ofVs3 leads to the iterative process. Applying the following steps in the given order defines the iterative scheme:
(1) DefineV0sN ¼V0s 1þV
0
s2þV
0N
s3 for eachNP1.
(2) Define the initial values required for the iterative scheme: ForN= 0,V0s0¼0 and forN= 1V0s1 3¼0. (3) Apply FFT to Eq.(8).
(4) Subtract theNth iteration from theN+ 1st. (5) Add FFTfV0s
1þV
0
s2gto both sides.
Then, for eachNP1 one gets,
FFTfV0Nþ1
s g ¼FFTfV
0N
s g þ
iqz 2pFFT
Z Z
oDxy
eikRðV0N
s V
0N1
s Þ
R
eikRðpffiffiffiffiffiffiffiffi1þS21Þ
ð1þS2Þ12
1
" #
dx0dy0
( )
FFTfV0N
s g þ
iqz 2pFFT
Z yþD2y
yD2y
Z xþDx
2
xDx
2
eikRðV0N
s V
0N1
s Þ
R
eikRð ffiffiffiffiffiffiffiffi1þS2 p
1Þ
ð1þS2Þ12
1
" #
dx0dy0
( )
þiqz
2pFFT
Z yDy
2
yAy
þ
Z yþAy
yþD2y
! Z xþAx
xAx
þ
Z yþDy
2
yD2y
Z xDx
2
xAx
þ
Z xþAx
xþDx
2 ! (
eikRðV0N
s V0
N1
s Þ
R
eikRðpffiffiffiffiffiffiffiffi1þS21Þ
ð1þS2Þ12
1
" #
dx0dy0 )
; ð17Þ
where the singular integral is approximated using the same method as[27, Appendix A]:
Z yþD2y
yDy
2 Z xþDx
2
xDx
2
eikRðV0N
s V0
N1
s Þ
R
eikRðpffiffiffiffiffiffiffiffi1þS21Þ
ð1þS2Þ12
1
" #
dx0dy0
ðVN
sðx;yÞ V
N1
s ðx;yÞÞ
Z Dy
Dx
DDyx
2 kq21sin
kDxq1 2
dv1 Z Dy
Dx
DDyx
2 kQ21sin
kDxQ1 2
dv1
" #
þ ðVNsðx;yÞ VNs1ðx;yÞÞ
Z Dy
Dx
DDyx
2 kq22 sin
kDyq2 2
dv2
Z Dy
Dx
DDyx
2 kQ22 sin
kDyQ2 2
dv2
" #
: ð18Þ
With the same definitions ofv1,v2,q1,q2,Q1andQ2as used in(15) and (16). Again the minimization ofAx
andAyis crucial in order to minimize the calculation effort in each iteration.
To summarize this subsection, the estimation of the normal derivative isV0N
s . The stopping condition forN is:kjV0sN1
V0N
2.4. Determining adequate Axand Ayfor calculations ofVs2 andVs3
To calculateVs2 we findR
*such that for anyR>R*,joG
oN0fooNG0j jfooNG0j.
Confining the discussion to the caseM= 0 andS< 1 which we employed above it is easy to show that
4p oG oN0
goG
oN0 !
¼eikR gg
0
R3
ð~R~R0Þ r0hg0
R3
!
eikRðpffiffiffiffiffiffiffiffi1þS21Þ
ð1þS2Þ32
1
" #
þikeikR ð~R~R0Þ r 0 hg0
R2
gg0
R2 !
eikRðpffiffiffiffiffiffiffiffi1þS21Þ
ð1þS2Þ 1
" #
: ð19Þ
A sufficient condition forjoG
oN0fooNG0j jfooNG0j is:
max
R>R
eikRðpffiffiffiffiffiffiffiffi1þS21Þ 1þS2 1
! ; e
ikRðpffiffiffiffiffiffiffiffi1þS21Þ
ð1þS2Þ32
1
!
( )
1:
An upper limit forSthat maintains the above inequality is established through the Tailor series expansion
ofpffiffiffiffiffiffiffiffiffiffiffiffiffi1þS2around S = 0 that yields eikRðpffiffiffiffiffiffiffiffi1þS21Þ
eikRS22 ¼e ikðgg0Þ2
2R . Thereafter, the expansion of e
ikðgg0 Þ2
2R around
ikðgg0Þ2
2R ¼0, requires a tighter condition:
jSj min 1; 1 kA
; ð20Þ
Which is then translated to a condition on R,
RmaxfA;A2kg; ð21Þ
whereA¼maxoDxyf
jgg0j
2 g, is the surface amplitude.
In these conditions eikðgg0Þ 2
2R 1þikðgg
0Þ2
2R , hence a first order approximation inSyields:
eikRðpffiffiffiffiffiffiffiffi1þS21Þ 1þS2 1
!
ikRS2
2 þS
2
1þS2
eikRðpffiffiffiffiffiffiffiffi1þS21Þ
ð1þS2Þ32
1
!
ikRS2
2 þ
3S2
2 1þ3S2
2 :
Moreover, since requirement (21)assure the extinction of the above terms, it is a sufficient condition to determineAxandAyforVs2.
The same condition(21)is sufficient forVs3. Typical settings forAx,Aycan be:
Ax¼minfLx;5 maxfA;A2kgg; Ay ¼minfLy;5 maxfA;A2kgg: ð22Þ
Special treatment should be applied to confinexAx,x+Ax,yAyandy+Ayinto the surface edges
bound-ary. As an example consider a rectangular surface [0,Lx]·[0,Ly], then the integral RxþAx
xAx
RyþAy
yAy is translated as:
Z xþAx
xAx
Z yþAy
yAy
Z minfLx;xþAxg
maxf0;xAxg
Z minfLy;yþAyg
maxf0;yAyg
: ð23Þ
Three remarks concerning conditions(20) and (21)will close this section:
• These conditions imply that our method is efficient at surfaces such that max {A,A2k}max {Lx,Ly}. In
this respect it is a low frequency or small amplitude method.
• Higher order expansions of foG
oN0 might improve condition(21).
• The highest slope in sinusoidal surfaces isA
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi kxg2þkyg2 q
3. Fredholm equation of the second kind
In this subsection we introduce the iterative scheme for solving Eq.(2). It is a Fredholm equation of the second kind which is known to be well conditioned. This is the reason for its superior performance compared to the first method. Following the procedure of the previous section, multiplication by 2 of Eq.(2)followed by addition and subtraction of the dominant integrals produces the analogous of Eq.(3):
Vsþ 1 2p
Z Z
oDxy
V0s4pofG oNdx
0dy0¼V
i
1 2p
Z Z
oDxy
V0i4pofG oNdx
0dy0 ð24Þ
1
2p
Z Z
oDxy
ðV0iþV0sÞ4p oG oN
f
oG
oN !
dx0dy0: ð25Þ
We abbreviate the integrals in Eqs.(24) and (25)by
VsþIs24¼ViIi24I25:
In contrast to the first equation, the calculation of Vs is based here on the values ofVi(rather than Ui). AgainoeG
oN is considered the dominant part of oG
oN and is easily calculated. oG
oN e
oG
oN is considered as a local residual
part. BothV0ioeG oN,V
0
se
oG
oN are added and subtracted to the original equation for efficient calculation. Since the
pro-cedure in this equation is almost identical with the first propro-cedure, the details can be skipped. One difference worth noting is that here the differentiation is with respect to the unprimed variables. This enters sign
differ-ences compared to the differentiation in the previous section equation. In particular oeG
oN 6¼f
oG
oN0 and the Fourier
transform of the derivatives become the regular one: cong oxn
ið
kx;kyÞ ¼inknibg.
For theM= 0 and maxoDjSj< 1 (assumed from now on), an application of approximation(9)to integral Is
24 yields:
Is24iFFT1fqzFFTfg0V0sgg þog oxFFT
1 kx
qzFFTfV
0
sg
þog oyFFT
1 ky
qzFFTfV
0
sg
igFFT1fqzFFTfV0sgg: ð26Þ
The same is true for integralIi
24so we can build an iterative scheme that ignores the residual integral(25)in Eq. (24).
The initial estimations forVsare based on the dominance ofooeGN. Thereafter, theNth iteration is subtracted from the (N+ 1)th iteration. This way, we get the following iterative scheme:
f Vs0¼Vi
f
Vs1¼Vi2iFFT1fqzFFTfg0V0igg 2
og oxFFT
1 kx
qzFFTfV
0
ig
2og
oyFFT
1 ky
qzFFTfV
0
ig
þ2igFFT1fqzFFTfV0igg
f
VsNþ1¼fVsN iFFT1 qzFFT g 0 fV0
s
N fV0
s
N1
n o
n o
og oxFFT
1 kx
qzFFTfðfV
0
s
N fV0
s
N1Þg
og oyFFT
1 ky
qzFFTfðVf
0
s
NfV0
s
N1Þg
þigFFT1 qzFFTfðfV0sN Vf0
s
N1Þg
n o
Again FFT1is applied to aperiodic terms so that Gibbs phenomenon will surely emerge. In addition, pow-ers ofqzappear in the the denominator of some terms, accordingly we will have to eliminate these terms
arti-ficially in the neighborhood ofqz= 0 to avoid singularity inaccuracies.
A sufficient condition for the extinction ofI25is:jooGNooeGNj jooeGNj
Otherwise we use the settle point of this scheme as a starting point to the iterative scheme of the exact equation:
V0
s¼fVsN1 V1s ¼VfsN
VNsþ1¼VNs iFFT1fqzFFTfg0ðV0sN V0sN1Þgg
og oxFFT
1 kx
qzFFTfðV
0N
s V0
N1
s Þg
og oyFFT
1 ky
qzFFTfðV
0N
s V0
N1
s Þg
þigFFT1 q
zFFTfðV0 N
s V0
N1
s Þg
1
2p
Z Z
oDxy
ðV0sNVs0N1Þ4p oG oN
f
oG
oN !
dx0dy0: ð28Þ
The last integral in the above scheme, is treated by the method applied to the right hand of Eq.(13). The next section discusses stability and error estimations.
4. Stability and error estimations
We chose to detect the validity (definiteness) of the methods described at Sections2 and 3by inspecting the solutions sensitivity to noise: the stability, and by estimating the error in absence of known analytic solution.
4.1. Stability
The linear algebra theory, suggests the investigation of maximal eigenvalues of the relevant matrix as the natural tool to investigate the system’s stability. Anyhow our matrix size (AN·N, such thatN=NxÆNyP104)
does not afford completion of such investigation which is at least O(N2) complex (see e.g., the power method in
[15]). An alternative (feasible) way is ad-hoc investigation of the sensitivity ofV~s against ‘‘small’’ changes of eitherV~ior in the integral operator. The former investigation is the more widely used one and we adopt it as well.
For the first scheme, we first apply incoming waveU1i and sign our scheme solution for it byVf 1
s. Then we add small noiseeU2
i with normal derivativeeV 2
i such thatjeU 2
ij jU
1
ij8ðx;yÞ 2oDxy. Thus this time we apply
U3i ¼U1i þeU2i to the scheme and sign its scheme solution byVf3s. Trivially we define the stability as:
StabilityEðjVf
1
s Vf
3
sjÞ
EðjeV2
ijÞ
; ð29Þ
whereE(Æ) is the boundary mean.
For the second scheme one needs to apply some normal derivativeV1i, sign its solution scheme by Vf1s. Thereafter apply a disturbed waveV3i ¼V1i þeV2i such thatjeV2ij jV1ij 8ðx;yÞ 2oDxyto the scheme and
eval-uate the stability.
Clearly, ifStability1 then the scheme is stable. On the other hand, if StabilityP2 it is sensitive to mea-surement noise.
4.2. Error estimation of Section3
dEðjVsfVsjÞwithout the need inVs(which we usually do not know). To do so, we reuse fVs in order to
solve the original equation for Vfi. The quotientEðjEVðjiVVeijÞ
ijÞ , will serve us an upper bound to the average relative errorEðjVsVesjÞ
EðjVijÞ .
Indeed, no prove is supplied to approve thatEðjVifVijÞ>EðjVsVfsjÞ. Nevertheless, the asymmetry of the two iterative processes suggests that the errors in the two stages will accumulate rather than subtract. Hence we will solve now Eq.(2) forfVi:
f
Viðx;y;gðx;yÞÞ ¼Vfsðx;y;gðx;yÞÞ þ2 Z Z
oDxy
ðfV0sþfV0iÞoG oN dx
0dy0; ð30Þ
Following Section3 and with the same definitions, we transform the equation into its deflated form:
f Vi
1 2p
Z Z
oDxy
f V0i4pofG
oNdx
0dy0¼fV
sþ
1 2p
Z Z
oDxy
f V0s4pofG
oNdx
0dy0 ð31Þ
þ 1
2p
Z Z
oDxy
ðfV0iþfV0sÞ4p oG oN
f
oG
oN !
dx0dy0: ð32Þ
Again we restrict our attention to the special caseM= 0 andS< 1. Starting with the truncated equation (that does not include the residual integralI32) one gets:
e Vi;0¼Ves
e
Vi;1¼Vesþ2iFFT1 qzFFTfg0Ve0sg
n o
þ2og
oxFFT
1 kx
qzFFTfVe
0
sg
þ2og
oyFFT
1 ky
qzFFTfVe
0
sg
2igFFT1nqzFFTfVe0sgo
e
Vi;nþ1¼Vei;nþiFFT1 qzFFTfg0ðVe0i;nVe 0
i;n1Þg
n o
þog oxFFT
1 kx
qzFFTfðVe
0
i;nVe
0
i;n1Þg
þog oyFFT
1 ky
qzFFTfðVe
0
i;nVe0i;n1Þg
igFFT1 q
zFFTfðVe0i;nVe 0
i;n1Þg
n o
: ð33Þ
As in scheme(28), in surfaces that does not satisfy requirement(20)almost everywhere, the last terms of the above iterative scheme will serve as initial guess for the accurate equation scheme:
e
Vi;0¼Vei;n1 Vei;1¼Vei;n
e
Vi;nþ1¼Vei;nþiFFT1fqzFFTfg0ðVe0i;nVe 0
i;n1Þgg
þog oxFFT
1 kx
qzFFTfðVe
0
i;nVe
0
i;n1Þg
þog oyFFT
1 ky
qzFFTfðVe
0
i;nVe
0
i;n1Þg
igFFT1fqzFFTfðVe0i;nVe0i;n1Þgg
þ 1
2p
Z Z
oDxy
ðVe0i;nVe0i;n1Þ4p oG oN
f
oG
oN !
dx0dy0; ð34Þ
4.3. Error estimation of Section2
Here the quotientEðjUseUsjÞ
EðjUsjÞ , will serve as an upper bound to the average relative error
EðjVsVesjÞ
EðjVijÞ . Note that this quotient differs from the one supplied to the second schemeðEðjViVeijÞ
EðjVijÞ Þ, since the solution of Eq.(1)will not equip us withfVi. The amplification or suppression inspired by the replacement ofEðjVsfVsjÞ withEðjUsUesjÞis cancelled by the division operation which replaceViwithUs.
Indeed, no prove is supplied to approve that this is an upper bound, yet, the asymmetry of the two iterative processes suggests that the errors in the two stages will accumulate rather than subtract. Hence we will solve now Eq. (1) for Ues. Following Section 2 and with the same definitions, we transform the equation into its deflated form:
e
Us
1 2p
Z Z
oDxy
4pgoG oN0Ue
0
sdx
0dy0 1
2p
Z Z
oDxy
4p oG oN0
goG
oN0 !
e
U0sdx0dy0
¼ 1
2p
Z Z
oDxy
f Vs0eikR
R dx
0dy0 1
2p
Z Z
oDxy
f Vs0eikR
R
eikRðpffiffiffiffiffiffiffiffi1þS21Þ
ð1þS2Þ12
1
" #
dx0dy0: ð35Þ
This time we chose to follow the reasoning of Section 3 with M= 0 andS< 1. If maxjSj minf1;1
kAg
almost everywhere then we can approximate the accurate equation by:
e
Us
1 2p
Z Z
oDxy
4pgoG oN0Ue
0
sdx
0dy0 1
2p
Z Z
oDxy
f Vs0eikR
R dx
0dy0;
for which we can develop cheap iterative scheme (O(NlogN)):
e
Us;0¼ iFFT1
FFTffVsg qz
( )
e
Us;1¼Ues;0FFT1 kx
qzFFT
og0 ox0Ue
0
s;0
FFT1 ky qzFFT
og0 oy0Ue
0
s;0
iFFT1nqzFFTfg0Ue0s;0goþgfVs
e
Us;nþ1¼Ues;nFFT1
kx
qzFFT
og0 ox0ðUe
0
s;nUe
0
s;n1Þ
FFT1 ky qzFFT
og0 oy0ðUe
0
s;nUe
0
s;n1Þ
iFFT1fqzFFTfg0ðUe0s;nUe0s;n1Þgg þigFFT1nqzFFTfUe0s;nUe0s;n1go: ð36Þ
Otherwise, the last terms of the above iterative scheme will serve as initial guess for the accurate equation scheme:
e
Us;0¼Ues;n1 Ues;1¼Ues;n
e
Us;nþ1¼Ues;nFFT1
kx
qzFFT
og0 ox0ðUe
0
s;nUe
0
s;n1Þ
FFT1 ky qzFFT
og0 oy0ðUe
0
s;nUe
0
s;n1Þ
iFFT1fqzFFTfg0ðUe0s;nUe0s;n1Þgg þigFFT1fqzFFTfUes0;nUe0s;n1gg
þ 1
2p
Z Z
oDxy
4p oG oN0
goG
oN0 !
ðUe0s;nUe0s;n1Þdx0dy0; ð37Þ
where the last boundary integral is truncated in the same way as in Section2.4.
5. Calculation of the scattered field above the surface
Usð~rÞ ¼ Z
oD oG
on0ð~r~r 0ÞU
sð~r0Þ Gð~r~r0Þ
oUs
on0ð~r 0Þ
ds0; ð38Þ
For a detailed proof one can refer to [8] page 69 and on. As opposed to Eq. (1), in this equation the unknown term isUs. It is a Fredholm equation of the second kind, thus it should be stable. Since this equation differs from(1) only by a factor, the solution will be similar. The natural substitute to R is:
Ra
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðxx0Þ2þ ðyy0Þ2þz2 q
:
where the subscript a stands for above. The natural replacement toSis:
Sa
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
g2ðx0;y0Þ 2zgðx0;y0Þ
p
Ra
¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
g022zg0
p
Ra
:
As in the surface definitions
r
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðxx0Þ2þ ðyy0Þ2þ ðzg0Þ2
q
¼Ra
ffiffiffiffiffiffiffiffiffiffiffiffiffi 1þS2a q
:
Note that any unprimed variable is located strictly above the surface. With these notations we can rewrite Eq. (38)in its deflated form:
2Usðx;y;zÞ ¼ 1 2p
Z Z
oDxy
4pgoG oN0U
0
sdx
0dy0
1
2p
Z Z
oDxy
V0seikRa
Ra
dx0dy0 ð39Þ
þ 1
2p
Z Z
oDxy
4p oG oN0
goG
oN0 !
U0sdx0dy0 1
2p
Z Z
oDxy
V0seikRa
Ra
eikRað
ffiffiffiffiffiffiffiffi
1þS2
a
p 1Þ
ð1þS2aÞ12
1
" #
dx0dy0 ð40Þ
This time foG
oN0 is expended in powers of Sa. The discussion is restricted to M= 0, and to z>A so that jSaj< 1. Applying FFT to the entire equation yields:
2FFTfUsg ¼
ieizqz
qz FFTfV 0
sg þF:T e
ikRaðxx0Þ 1
R3a ik R2a
FFT og 0
ox0U
0
s
þF:T eikRaðyy0Þ 1
R3 a ik R2 a
FFT og 0
oy0U
0
s
þF:T e
ikRa
R3
a
ike
ikRa
R2
a
FFT ðg0zÞU0s
ð41Þ
1
2pFFT Z Z
oDxy
eikRa gg
0
R3
a
ð~R~R
0Þ r0
hg
0
R3
a
! eikRað
ffiffiffiffiffiffiffiffi
1þS2
a
p
1Þ
ð1þS2aÞ32
1
" #
U0
sdx
0dy0
( )
ð42Þ
þ 1
2pFFT Z Z
oDxy
ikeikRa gg
0
R2
a
ð~R~R
0Þ r0
hg
0
R2
a
!
eikRað ffiffiffiffiffiffiffiffi1þS2
a
p
1Þ
ð1þS2
aÞ 1
" #
U0
sdx
0dy0
( )
ð43Þ
1
2pFFT Z Z
oDxy
V0seikRa
Ra
eikRað
ffiffiffiffiffiffiffiffi
1þS2
a
p
1Þ
ð1þS2aÞ12
1
" #
dx0dy0
( )
¼ ie
izqz
qz FFTfV 0
sg
kxe
izqz
qz FFT
og0
ox0U
0
s
kye
izqz
qz FFT
og0
oy0U
0
s
þe
izqz
z FFTfðg 0zÞU0
sg þFFTfI42þI43þI44g; ð44Þ
where the symbolF.T{f} replaces the previousbf due to the lengthy nature of the transformed terms. The
mul-tiplier term FFTfðg0zÞU0
sg results from the equality
eikRa
R3
a
ikeikRa
R2
a ¼
oeikRa Ra
oðz2Þ.I42, I43and I44 can all be trun-cated according to the methods outlined at Section 2.4. Furthermore, we can totaly eliminate them at points for which zmax {A,A2k} which assure that Saminf1;kA1g.
6. Numerical tests and results
is eitherVsor FFT{Vs}. The results are demonstrated using graphs. These substantially differ from the pop-ular Bistatic Coefficient graphs (as used by[24–26,21,22]and more). We will explain this choice later on. The chosen reference solution is the one of Macaskill and Kachoyan in[27]. We chose it due to its resemblance to our second method and its dependance on the same Eq.(2). Macaskill et al. solve this equation by simple iter-ation method in O(N2) which restricted its application size to N= 104 net size (for moderate computer resources).
The following five tests were conducted:
6.1. Test 1: Basic comparison
In cases where the first method could be considered accurate, we used the following strategy: For the first method, we can feed a known solution of Eq.(1)such as plane wave propagating in the positive direction of the z axis:
Usðx;y;zÞ ¼eijk
x
sjxþijk
y
sjyþijkzsjz ) V
s¼ ijkxsj
og oxijk
y
sj
og oyþijk
z
sj
Us:
The input isUsand the output should be the accurate (known)Vs. Yet since the scheme solution,fVs, differs fromVs, We denote the difference by:e1stðx;yÞ ¼ jVsfVsj.
e1stcan now serve us as good estimate to the error of the scheme when solved for the dual incoming wave. That is the same wave but with a propagating direction opposite to thez-axis:
Uiðx;y;zÞ ¼eijk
x
sjxþijkysjyijkzsjz ) V
i¼ ijkxsj
og oxijk
y
sj
og oyijk
z
sj
Ui:
If we denote the exact (unknown) solution of the scattering problem ofUibyVsand the numerical solution byVe1st
s we can estimate that:
jVe1sts j6jVsj je1stj:
With this estimation under hand, we can estimate the errors inVe2nd
s andVeMacs which are the numerical solu-tions of our second scheme and the one of Macaskill, respectively:
If for example jVe1st
s Ve2nds j6je1stj, then the two methods are consistent. Otherwise, we can confidently conclude that the second method’s error is greater than ±e1st. As a working method, this test is recommended as a calibration tool rather than an applicability test due to its narrow applicability range (up to slopes of 0.1). For this reason we demonstrate its performance with as simple parameter values as possible. We applied this test to the Laplace equation (k= 0) as well by cautious changes in the relevant programs. The results of the Laplace equation case were far better than the ones performed for the Helmholtz equation and enabled work-ing with slopes of 0.5.
The representative cases presented are:
(1) The number of surface points for a wavenumber (sampling rate) must exceed the Nyquist Rate (2 points per cycle). We set the minimal rate to 4 in our programs. Hence,Nx(the total number of net points along
thex-axis), must comply with
NxPMinRatemax
Lx kxi;
Lx kxg
( )
¼LxMinRatemaxfk x
i;k
x gg
2p :
Similarly,Ny(the total number of grid points along they-axis), must comply with
Ny PMinRatemax
Ly kyi;
Ly kyg
( )
¼LyMinRatemaxfk y
i;k
y gg
In practice, the parameters settings work flow is as follows:
(a) The number of net points along each axis (NxandNy) were set in advance.
(b) The surface lengthesLxandLyare then set in a way that assure the minimal sampling rate of the
incoming wave as well.
(c) The values ofkxgandkygalways obeyed both the minimal sampling rate and the conditionskxg
kx
i 2 Qand
kyg
kyi 2Q. The last conditions reduce the FFT Gibbs phenomenon.
(2) Both the incoming wave and the surface were chosen so that the y-axis wavenumber was zero. This way, our solutions could be compared with one-dimensional solvers solutions.
(3) Size parameters:Nx= 128,Ny= 4.
(4) Waves parameters:
Usðx;y;zÞ ¼eik
x
ixþik
y
iyþik
z
iz; Uiðx;y;zÞ ¼eikxixþik
y
iyik
z
iz
k¼2p; h¼45; /¼0; kix¼ksinðhÞcosð/Þ ¼ppffiffiffi2;
kyi ¼ksinðhÞsinð/Þ ¼0; kzi ¼kcosðhÞ ¼ppffiffiffi2:
(5) Surface parameters:
0 50
—50
—100 100
0 50
—50
—1000 100
0.2 0.4 0.6 0.8 1
kx
0 0.002 0.004 0.006 0.008 0.01
kx
0 50
—50
—100 100
kx
0 0.02 0.04 0.06 0.08
a
b
c
d
—100 —50 0 50 100
—150 —100 —50 0 50
kx
Bistatic Coefficient (dB)
[image:16.544.76.470.70.405.2]1st Method 2nd Method
Lx ¼
8 ffiffiffi 2
p ; Ly ¼1; A¼0:045; kxg¼ p
ffiffiffi 2
p ; kyg¼0;
Slope¼A
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi kx2
g þk y2
g
q
¼0:1; gðx;yÞ ¼Asinðkx gxþk
y gyÞ:
Following the stated policy of determining the accuracy of the first solution it was found on average 1% accurate.
FromFig. 1(c) and (d) it is seen that Macaskill’s method results are inconsistent with our two methods. On
the other hand, our two methods are found to be mutually consistent in the sense that their difference graph
(Fig. 1(c)) has the same scale as the error estimation (1%).
To explain this inconsistency we developed the next test.
6.2. Test 2: Treatment of compact (aperiodic) roughness
Examination of our schemes and Macaskill’s scheme uncover a substantial difference in the basic assumptions that lead to the schemes: The usage of cyclic convolution in our schemes suggests that if the scheme rectangle rep-resent a small part of cyclic ‘‘infinite’’ boundary (as may occur in ocean surfaces) then our schemes are the ade-quate tool to solve the scattering problem. If on the other hand the region of roughness has a compact support, then Macaskill’s method is the adequate tool. Yet we can use zero padding policy in order to approach the com-pact support case. The more zero padding we use, the better the expected agreement. The essence of the second test is therefore applying zero padding tog,UsandVi. We applied an increasing region of zeroes to the same case and tested the error between our second method and Macaskill’s. Test parameters:
(1) Determination of the test case scales and net points, see test6.1number 1.
(2) The multiplication factors of the basic grid point numbersNx,Nywhere chosen to ben= {1, 2, 4, 8, 16}
so as to preserve the power of 2 nature ofNxandNy. Thus, the spacial vectorsx, ywere enlarged to
x= [0:(nNx1)]dxandy= [0:(nNy1)]dy.The arrays ofViandgand its derivatives were zero padded adequately. For example, for each nP2,g(Nx+ 1:nNx, 1:nNy) = 0 and g(1:Nx, Ny+ 1:nNy) = 0.The
frequency plane entitieskx,ky,qzwere refined. For example, for eachnP2,kx¼nL2px½nN2x:nN2x1.
(3) Basic size parameters:Nx= 64,Ny= 32.
(4) Incoming wave parameters:Uiðx;y;zÞ ¼eik
x
ixþik
y
iyik
z
iz where
k¼2p; h¼45; /¼30; kxi ¼ksinðhÞcosð/Þ ¼p
ffiffiffi 3 2 r
;
kyi ¼ksinðhÞsinð/Þ ¼ pffiffiffi
2
p ; kzi¼kcosðhÞ ¼ppffiffiffi2:
(5) Surface parameters:
Lx ¼4
ffiffiffi 2 3 r
; Ly¼2
ffiffiffi 2
p
; A¼0:0225;
p
ffiffiffi 3 2 r
6kx g6
17ppffiffiffi3
8 ; k
y g¼
p
ffiffiffi 2
p ; Slope¼A
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi kx2
g þk y2
g
q
¼0:1;
gðx;yÞ ¼cAsinðkx gxþk
y gyÞ þ
cA 4 sinð2k
x gxþ3k
y gyÞ þ
cA 9 sinð7k
x gxþ4k
y gyÞ;
where the constantcthat multipliesAmakes sure that the slope do not exceed 0.1.
6.3. Test 3: Error estimation
Notice the relative instability around Hi= 35; we chose to limit the investigation to the range 106Hi680out of which the stability performance deteriorates.
The parameters of this test are:
(1) Determination of the test case scales and grid points, see test6.1number 1. (2) Size parameters:Nx= 32,Ny= 64.
(3) Incoming wave parameters:h ranges from 15to 85rather than a single value. Aside from this all the details coincide with those of test6.2number 3.
(4) Surface parameters: Replace in test6.2number 4Lx ¼2pkx
i, Ly ¼4pky
i
andkxg/2p
Lx,k
y g/
2p
Ly. These settings are
in accord with the changes inkxi andkyi above.
6.4. Test 4: Stability
This test applies the stability test as described in Section4.1for both the first and the second methods. The calculation was performed over various values of kxg and hi and then calculated the stability as defined by definition(29). The figures in this test presents the dependence of the stability onkxgandhiat various slopes. The other parameter settings are equal to the ones in test6.3. For the slope of 0.5 2nd method we excluded
Hi= 35which did not converge.
6.5. Test 5: Performance
Here we conducted a large scale test that proves the capabilities of the schemes. The large rough surface were set bumpy enough to cause the costly procedures 17 and 28 to become active. As reference we investi-gated slopes for which only the inexpensive approximations are active. The test parameters are:
(1) Determination of the test case scales and grid points see test6.1number 1. (2) Size parameters:Nx= 1024,Ny= 256.
(3) Incoming wave parameters: Replaceh value withh= 20in test 6.2number 3. (4) Surface parameters: SetLx= 108.03, Ly= 46.78, A= 0.26,
kxg¼1:92; kyg¼0:13; Slope¼A
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi kxg2þkyg2 q
¼0:5
and put the appropriate c in Section6.2number 4. A slope of 0.1 achieved by decreasing of A served as a reference test where the expensive schemes 17 and 28 are inactive.
7. Discussion
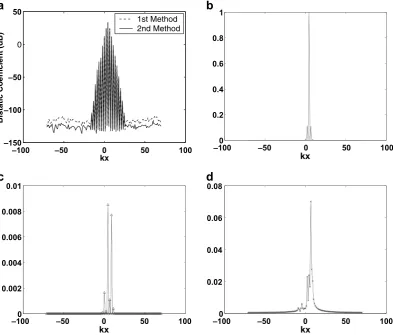
The Bistatic CoefficientFig. 1(a) demonstrates the weakness of the Bistatic (logarithmic) measure: It is easy to notice that the error is hard to discern exactly in the most interesting direction (where dominant scattering intensity occurs) and is emphasized in the unimportant directions, where scattering is negligible. This property distorts the error graph in a way that convinced us to look for an alternative presentation: Normalization of they-axis scale to the maximal scattering intensity.
As mentioned in subsection 6.1 the average error was preliminary investigated by solving Eq. (1) with the dual outgoing plane wave. Thus, we could treat the first method solution in this test as accurate to 1%.
In Fig. 1(b) the incoming wave direction is set to its correct direction (i.e. into the rough surface). This
figure illustrates the scattering intensity as a function of thex-axis wave numberkx. The connection between
hs¼Arctan
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi k2k2xk2y
k2xþk2y v
u u t 0 @
1 A:
As expected, the maximal intensity direction is the specular refraction direction kx= 4.44. The figure is
plotted for ky= 0 since any other direction contained negligible intensities due to its non specular nature.
Enlargement of the minimal sampling rate from 4 to 8 (see additional details in Section6.1) reduced the error by approximately a factor 2, whereas additional refinements of the minimal rate show no improvement.
The error graph 1(c), demonstrates agreement between our two methods. In contrast graph 1(d) demon-strates inconsistency between Macaskill’s Method and ours. As is evident from the results of the next test, this inconsistency can be ascribed to the compact rough surface assumption of Macaskill et al. versus our periodic rough surface assumption.
As a closing remark to this test let us mention that we applied this test to Laplace equation (k= 0) with superior results that allowed the tests to be considered successful up to slopes of 0.5.
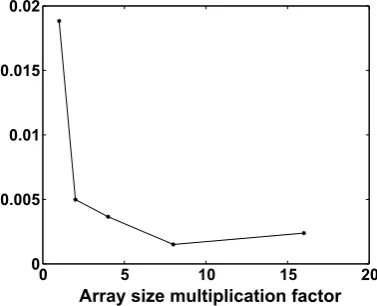
Fig. 2illustrates the maximal error (y-axis) between our second method and Macaskill’s as a function of the
arrays size multiplication factor 1,2,4,8,16 (x-axis). The left hand value of this graph is approximately 0.02 which is consistent with the results demonstrated at graph 1(d). The trend is for better agreement with more zero padding. Furthermore the maximal error received with this factor is approximately 0.003 which is within the error range predicted by test6.1.
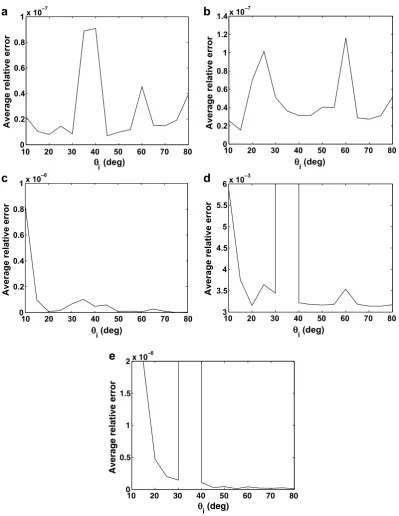
Fig. 3(a)–(e), demonstrate the dependence of the average error (defined at Section4.1) on both the anglehi
(the angle between the incoming wave number vector and thez-axis) and thex-axis surface wavenumberkxg. The first two graphs 3(b) and 3(a), show the relative error at slopeS(g) = 0.1. Comparing them reveals the supreme performance of the second test with respect to the average error estimation. Yet, comparison of these results with those of test 6.1 suggests that we cannot consider the relative error to be an upper bound to the ‘‘real’’ error between the numerical and theoretical solutions. One possible explanation to this is that the numerical schemes settle points differs substantially from the theoretical settle point. Consequently we recommend to treat this error test as an upper bound of the applicability range. With this in mind,
Fig. 3(d) provides an upper slope threshold of 0.5 to the first method. Fig. 3(e) shows an upper threshold
of slope 1 to the second method.
Let us also mention that for 06hi610 and 806hi690 the results become divergent. Consequently, 106hi680 is the application range for our method.
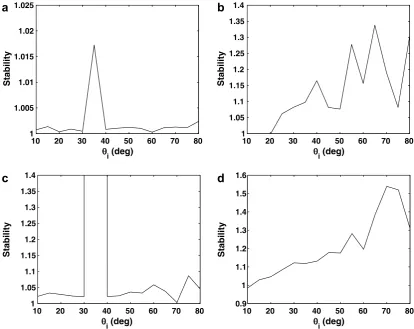
Fig. 4demonstrates the stability, as defined at(29), as a function of the anglehiand the surfacex-axis
wave-numberkx
g. Graphs 4(b) and 4(a), are for slope up toS(g) = 0.1. They reveal that both methods are stable at
this slope, with the second method performing better. The other couple of graphs are the methods stability performance for surfaces with slopes up to 0.5. Again the second method performs better. Our last test was a performance test. The computation time was a few seconds for the small slopes approaching S(g)60.1
0 5 10 15 20
0 0.005 0.01 0.015 0.02
[image:19.544.180.369.516.669.2]Array size multiplication factor
where only the inexpensive steps of the schemes were involved. The computation time was a few hours for the higher slopes where the heavy calculation steps become active. For the time consuming cases the second method was twice as fast as the first one so that the superiority of the second method is evident in computation cost as well.
10 20 30 40 50 60 70 80
0 0.2 0.4 0.6 0.8
1x 10
—7
θi (deg)
Average relative error
10 20 30 40 50 60 70 80
0 0.2 0.4 0.6 0.8 1 1.2 1.4x 10
—7
θi (deg)
Average relative error
10 20 30 40 50 60 70 80
0 0.2 0.4 0.6 0.8
1x 10
—6
θi (deg)
Average relative error
10 20 30 40 50 60 70 80
3 3.5 4 4.5 5 5.5
6x 10
—3
θi (deg)
Average relative error
10 20 30 40 50 60 70 80
0 0.5 1 1.5
2x 10
—6
θi (deg)
[image:20.544.71.471.63.580.2]Average relative error
8. Conclusions
(1) The first method is recommended as a benchmark solution with a good estimation on its error size for mild slope surfaces (S60.1).
(2) Otherwise, the conducted numerical tests, suggest the usage of the second method as the default choice. For this reason it is the default subject of the below listed conclusions.
(3) Numerical behavior is satisfactory to slopes of at least 1. This is the conclusion from tests6.3 and 6.4. (4) Test6.3reveals the angle range 106hi680 that the method can be applied to.
(5) The characteristic complexity for small slopes surfacesðjSj60:1 minf1; 1
kAgÞis O(NlogN) dominated
by few FFT evaluations. The memory consumption is O(N). This makes the iterative method attractive. (6) In steeper surfaces the complexity is multiplied by factorCM. Eventually,CMis the number of iterations (few) times the number operations required to evaluate the local residual integrals. Thus,CMis propor-tional to the number of net points in the region [xAx,x+Ax]·[yAy,y+Ay] whereAx= min {Lx,
5 max {A,A2k}} andAy= min {Ly, 5max {A,A2k}}. Consequently,Low frequencyorSmall amplitude
surfaces are more efficiently handled.
(7) No complications are predicted in extending our methods the Neumann BCðoUsðx;y;gðx;yÞÞ
on ¼
oUiðx;y;gðx;yÞÞ
on Þ.
Here the unknown term of the direct scattering problem becomesUs. Eq. (1) is therefore a Fredholm equation of the second kind and thus predicted to supply steady and reliable solutions. Eq.(2), should be replaced by:
10 20 30 40 50 60 70 80
1 1.005 1.01 1.015 1.02 1.025
θi (deg) θ
i (deg)
θi (deg)
θi (deg)
Stability
10 20 30 40 50 60 70 80
1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4
Stability
10 20 30 40 50 60 70 80
1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4
Stability
10 20 30 40 50 60 70 80
0.9 1 1.1 1.2 1.3 1.4 1.5 1.6
[image:21.544.66.481.67.396.2]Stability