Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
2003
Near-Lossless Bitonal Image Compression System
Jeremy Pyle
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please [email protected].
Recommended Citation
Near-Lossless Bitonal Image Compression System
By
Jeremy Pyle
A Thesis Submitted
III
Partial Fulfillment of the
Requirements for the Degree of
MASTER OF SCIENCE
III
Computer Engineering
Approved by:
Principal 'Advisor _ _ _ _ _ _
--:--_ _ _ _ _ _ _ _ _ _ _
_
Dr. Andreas Savakis
,
Associate Professor and Department Head
Committee Member
-Dr. Kenneth Hsu
,
Professor
Committee
Member _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_
Dr. Marcin Lukowiak, Visiting Assistant Professor
Department of Computer Engineering
College of Engineering
Rochester Institute of Technology
Rochester
,
New York
Release Permission Form
Rochester Institute of Technology
Near-Lossless Bitonal Image Compression System
L Jerem
y
Pyle
,
hereby grant permission t
o
th
e
Wallace Library and the Department of
C
omputer Engin
ee
ring at the R
o
chest
e
r In
s
titute of Technolob'), to reproduce m
y
thesi
s
in
whole or in part
.
Any repr
o
duct
i
on \\ill not be for commercial u
s
c or profit.
J
e
rem
y
C
.
Pyle
,
', i
I
~;'
''''
'
"
)
/I
I /
I ( I : : , <" , ; _" ... I\.. Ii
Abstract
The main purpose ofthis thesis is to
develop
an efficient near-lossless bitonal compressionalgorithm and to implementthat algorithm on a hardware platform. The current methods for
compression ofbitonal images includetheJBIG andJBIG2 algorithms,however both JBIGand JBIG2 havetheirdisadvantages. Both ofthesealgorithms are covered
by
patentsfiledby
IBM,
making themcostly to implementcommercially.
Also,
JBIG onlyprovides means for lossless compression while JBIG2 provideslossy
methods only for document-type images. For these reasons a new method forintroducing
loss and controlling this loss to sustain quality is developed.The lossless bitonal image compression algorithm used for this thesis is called Block Arithmetic Coder for Image Compression
(BACIC),
which can efficiently compress bitonal images. In this thesis, loss is introduced for cases where better compression efficiency isneeded.
However,
introducing
loss in bitonal images is especiallydifficult,
because pixels undergo such adrasticchange,either fromwhitetoblackorblacktowhite. Suchpixelflipping
introduces salt and peppernoise, which can be verydistracting
when viewing an image. Twomethods are usedincombinationto controlthevisualdistortion introduced intothe image. The first isto
keep
trackofthe error createdby
theflipping
ofpixels, andusingthiserrortodecidewhether
flipping
another pixel will causethevisual distortion toexceed a predefinedthreshold. The second method is region ofinterestconsideration. In this method, lower loss or no loss is introduced into the important parts ofanimage,
and higher loss is introduced into the less important parts. This allows for a good quality image whileincreasing
the compressionefficiency.
Also,
the abilityofBACIC to compress grayscaleimages is studied andBACICm,
a multiplanarBACIC algorithm, iscreated.Ahardware implementation oftheBACIC lossless bitonal image compression algorithmisalso designed. The hardware implementation is done using VHDL
targeting
a XilinxFPGA,
whichis veryuseful,because ofits flexibility. TheprogrammedFPGAcouldbeincluded inaproduct
Acknowledgements
The author would like to acknowledge the members ofthe thesis committee for their guidance and assistance with theproject: Dr. Andreas
Savakis,
Dr. KenHsu,
andDr. MarcinLukowiak,
Table
ofContents
Chapter 1. Introduction
Page Number: 1
Chapter 2. Image Compression Background 2.1
Entropy
2.2 Image
Encoding
Techniques 2.2.1 HuffmanCoding
2.2.2 ArithmeticCoding
2.3 ImageHalftoning
2.3.1
Dithering
2.3.2 Error Diffusion 2.4Lossy
CompressionChapter 3. Bitonal Image Compression Algorithms 3.1
Group
33.1.1
Group
3 1-D 3.1.2Group
3 2-D 3.2Group
43.3 JBIG 3.4 JBIG2 3.5 BACIC 3 3 4 5 7 10 10 12 14 17 17 17 20 23 24 32 40
Chapter 4. Loss Introduction Algorithms 46
4.1 Background 46
4.2
Greedy
Rate-DistortionFlipping
494.3
Low-Latency Greedy
Flipping Utilizing
Forgetful Error Diffusion 504.4 RegionofInterest 53
Chapter 5. HardwareImplementation Overview 5.1 Introduction
5.2 Xess XSV-300
Prototyping
Board 5.3 SRAM Model Module5.4
Memory
Controller Module 5.5 Divider Module5.6 Context Generator Module
5.7 BACIC Encoder/Decoder Module 5.7.1 Encoder
5.7.2 Decoder 5.8 System Module 5.9 Testbench Module
55 55 55 56 58 65 66 67 68 72 75 77
Chapter 6. PerformanceComparison
6.1 Lossless Bitonal Image Simulation Results 6.2 Near-Lossless Bitonal Image SimulationResults
6.3 Near-Lossless With ROI Bitonal Image Simulation Results 97
6.4 Grayscale Image Compression Results 103
6.5 Hardwarevs. Software Simulation Performance 106
Chapter 7. Future WorkandDiscussion 109
Glossary
1 1 1List
ofFigures
Figure 2.1. Huffman
Binary
TreeFigure 2.2. Arithmetic
Coding
Example-Step
1 Figure 2.3. ArithmeticCoding
Example-Step
2 Figure 2.4. ArithmeticCoding
Example-Final Steps
Figure 2.5. Dithered Images
Figure 2.6. Low Resolution Dithered Images
Figure 2.7. Error Diffusion Algorithm
Figure 2.8.
Floyd-Steinberg
WeightsFigure 2.9. Error DiffusedandDithered Images
Figure 2.10. Low Resolution Error Diffusedand Dithered Images
Figure 2.1 1. Modified Peak Signal-to-Noise Ratio
Figure 3.1. Flow Chart for One-Dimensional G3 Compressionstandard
Figure 3.2.
Changing
Element PlacementFigure 3.3. Flow Diagram for Two-Dimensional G3 Algorithm
Figure 3.4. Resolution Reduction Pixel Location
Figure 3.5. Resolution Reductionand Data
Striping
Figure 3.6. Data
Ordering
Figure 3.7. Lowest Resolution Layer Templates
Figure 3.8. Differential Layer Templates
Figure3.9. Deterministic Prediction Pixels
Figure3.10. Sequential Encoder Block Diagram
Figure 3.11.Differential Layer Encoder
Figure 3.12. JBIG Progressive Encoder
Figure3.13. JBIG2 Pattern
Matching
and Substitution Flow DiagramFigure3.14. JBIG2 Soft Pattern
Matching
Figure 3.15. JBIG2 Template for Refinement
Coding
Figure 3.16. JBIG2 Template for Halftone
Encoding
Figure 3.17.
Gray
Code ExampleFigure 3.18. BACIC Templates
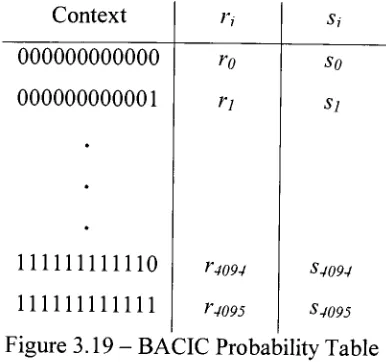
Figure 3.19. BACIC
Probability
TableFigure 3.20. BACIC Static
Binary Coding
Tree 44Figure 3.21. BACIC Adaptive
Binary Coding
Tree 45Figure 4. 1. BACIC Three Line Template Reflection 48
Figure 5.1. XSV-300
Prototyping
Board 55Figure 5.2. SRAM Model Interface Diagram 57
Figure 5.3.
Memory
Controller Interface Diagram 61Figure 5.4.
Memory
Controller State Diagram 63Figure 5.5. Divider Interface Diagram 65
Figure 5.6. Context Generator InterfaceDiagram 66
Figure 5.7. BACIC Encoder/DecoderInterface Diagram 68
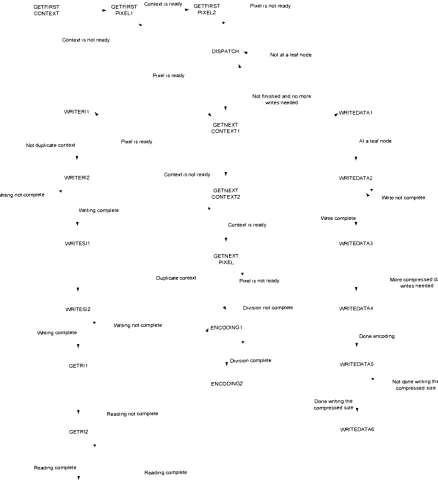
Figure 5.8. BACIC
Encoding
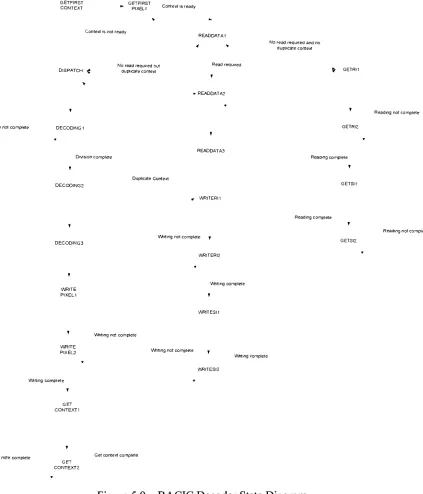
State Diagram 69Figure 5.9. BACIC Decoder State Diagram 73
Figure 5.10. System Module Architecture 76
Figure 5.11. TestbenchModule Architecture 77
Figure 6. 1. Near-losslessDocument-TypeImages 84
Figure 6.2. High
Quality
Clustered-Dot Lena Image 86Figure 6.3. High
Quality
Clustered-Dot Peppers Image 86Figure 6.4. Medium
Quality
Clustered-Dot Lena Image 87Figure 6.5. Medium
Quality
Clustered-Dot Peppers Image 87Figure6.6. Low
Quality
Clustered-Dot Lena Image 88Figure 6.7. Low
Quality
Clustered-Dot Peppers Image 88Figure 6.8. High
Quality
Dispersed-DotLena Image 89Figure6.9. High
Quality
Dispersed-DotPeppers Image 89Figure 6. 10. Medium
Quality
Dispersed-Dot Lena Image 90Figure 6.11. Medium
Quality
Dispersed-DotPeppers Image 90Figure 6. 12. Low
Quality
Dispersed-DotLena Image 91Figure 6.13. Low
Quality
Dispersed-DotPeppers Image 9 1Figure 6.14. High
Quality
Error Diffused Lena Image 92Figure 6.15. High
Quality
Error Diffused Peppers Image 93Figure 6.16. Medium
Quality
Error Diffused LenaImage 94Figure 6.18. Low
Quality
Error Diffused Lena Image 95Figure 6.19. Low
Quality
Error Diffused Peppers Image 96Figure 6.20.
Near-lossless(ROI)
Airplane Image 98Figure 6.21.
Near-lossless(ROI)
Lena Image 99Figure 6.22.
Near-lossless(ROF)
Boat Image 100Figure 6.23.
Near-lossless(ROI)
Monarch Image 102List
ofTables
PageNumber:
Table 2.1. Huffman
Coding
Symbol Probabilities 5Table 2.2. Huffman
Coding
Codewords 6Table 2.3. Arithmetic
Coding
Example- Symbol Probabilities 7Table 3.1.
Changing
Elementsfor 2D G3 Algorithm 20Table 3.2. Vertical Mode Case Description 23
Table 4. 1. Error Diffusion Loss Introduction Parameters 5 1
Table 4.2. Error Diffusion Loss Introduction Parameter Values 53
Table 5.1. Hardware
Memory
Map
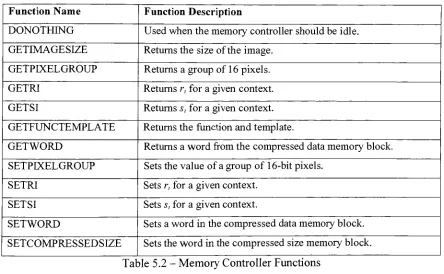
59Table 5.2.
Memory
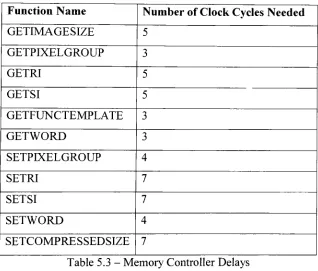
Controller Functions 60Table 5.3.
Memory
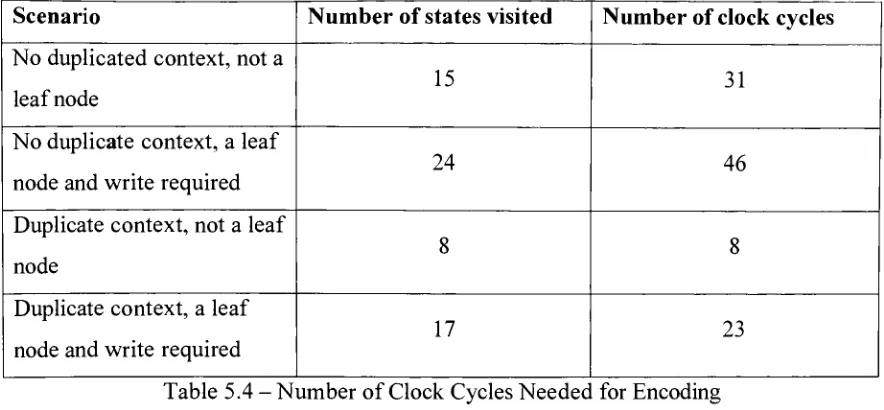
Controller Delays 64Table 5.4. NumberofClock Cycles Neededfor
Encoding
72 Table 5.5. NumberofClock Cycles Needed forDecoding
74Table6. 1. Test Documents 78
Table 6.2. Test Images 78
Table6.3. Lossless Document Compression Results 79
Table 6.4. Lossless Clustered-Dot Compression Results 80
Table 6.5. Lossless Dispersed-Dot Dithered Compression Results 81
Table 6.6. Compression Ratios for Lossless Error Diffused Images 82
Table 6.7. Near-Lossless Compression Results for Document-Type Images 85
Table 6.8. Near-Lossless Compression Results for Clustered-Dot Dithered Images 89
Table 6.9. Near-Lossless Compression Results for Dispersed-Dot DitheredImages 92
Table 6. 1 0.Near-Lossless Compression Results for Error Diffused Images 96
Table6. 1 1.GrayscaleImages 103
Table 6.12. Bitonal Image CompressiononGrayscale Images Compression Results 105
Table6.13. Not
Allowing
Negative Compression 105Table 6.14. Grayscale Image Compression Algorithm Results 106
Chapter
1.
Introduction
Image compression has been and continues to be a growing area of interest in the image processing field. As the capabilities ofdigital cameras, scanners and other optical recording
devices improve and the recording resolution ofthese devices
increase,
the amount of disk storage space neededto storeimages increases.Therefore,
a needfor imagecompression exists.There are two main categories of compression algorithms used today: lossless and lossy. A lossless compression algorithm is one in which, after the image has been decompressed each pixel value oftherecovered image is identicalto that ofthe original image [25-27]. Whenthe application requires compression efficiency that is greater than what can be provided
by
lossless image compression algorithms,lossy
image compression algorithms are used[28-31]
[38]. Alossy
compression algorithm is one in which the image data ofthe decoded image is not identical to that ofthe source. Near-lossless algorithmstypically
introduce loss in such a waythat the compression efficiencyincreases sufficiently, but theamount ofloss inthe image isnot noticeableby
thehuman eye orisnoticeabletoan acceptablelevel.Near-lossless compression algorithms continue to be a growing research
interest,
particularly for bitonal images.Introducing
loss ina bitonal image is especially difficult. To introduce loss inabitonalimage,
pixels are flipped meaninga pixel is either changed from a black pixelto a white pixel or vice versa.However,
ingrayscale or colorimagesthelosscan be introducedtoa much lowerdegree,
becausethepixel value canbechanged so that thedifference is onlyafew gray levels or levels of colordepending
on the type ofimage. This pixelflipping
introducessalt and paper noise on the bitonal
image,
greatlydecreasing
the visual quality if distortioncontrol measures are nottaken.
Compression algorithms can be very complex and, therefore, be costly when considering
execution time, making it beneficial to implement the algorithm on a hardware platform
[24]
[32-36].Also,
bitonal images aretypically
used infaxing
and printing, soimplementing
themachine to perform the decompression ratherthan requiring the printer or fax machine to be attachedtoa computertohandlethedecompression.
The compression methods and hardware implementation developed and used in this thesis is
beneficial,
because it provides increased compression for bitonal images as well asthe ability forthe images to be compressed on a hardware chip. This would become useful in thefaxing
orprinting industry. Ifan enormous documentweregoingtobeprinted,ratherthanwaiting for
theentire lossless imageto be sentto aprinter, some losscouldbe introducedto the document. The document couldthen becompressed and sent to theprinter wherethe hardware chip inthe
printer could decompressthe imageandthenprintit outsavingvaluabletime. Thesame is also
trueforafaxmachine.
Following
the introduction in Chapter 1, the rest ofthis thesis isorganized as follows: Chapter2provides background information intheimagecompressionarea; Chapter 3 discusses lossless bitonal image compression algorithms; Chapter 4 dealswith the loss introduction algorithms;
Chapter 5 discusses the hardware implantation for this thesis; Chapter 6 presents the results
Chapter 2.
Image Compression
Background
This chapter discusses the fundamentals needed when
dealing
with image compression. Itdiscusses
terminology
used throughout the image compressionfield,
coding methods used to compress data andimagehalftoning
methods.2.1
Entropy
When performing image compression, the redundancy in the data is removed. The more
redundancy thatis removed from the imagethe more efficient the compression. For example, for a bitonal
image,
i.e. an image consisting of only black and white pixels, of sizeNxN,
normally N~
bits wouldbe neededto storethe image. However, ifthe image consisted only of ones,thenitcouldbe stored withonlyone
bit,
reducing alldataredundancy.Entropy
is a well known metric, which defines the amount ofinformation in a bit stream and representsthe lower limit to the amount ofbitsthat can be used with full data recovery. The equationforentropy, H, canbefound below.H=
-X
P(Cj
)
logP(fl,
)
(Eqn. 2.1)
whereP(a
),
is the probability of symbola;
. The derivation of this equation can be seen below [5]. A quantity named self-information is theamount ofinformation stored in an eventE,
andis shownbelow.1(E)
=log-/-=-logF(F) (Eqn.
2.2)
r(b)The above equation states that the amount of self-information stored in
E,
1(E),
isinversely
proportional to theprobabilityofE. IfP(E)=l,
meaningthat the event is certain, thenI(E)=0 and no informationis storedin E. This isbecause,
if it is knownthatthe event will occur, then there is no uncertainty, so if it is communicated that the event has occurred, then no information hasactuallybeentransferred.base-2 is used forall logarithms unless otherwise specified. Therefore, iftheprobability of an
event occurring is
V2,
then the information stored inthatevent is I(E)=-log2(1/2)= 1
bit. When
one oftwo possible events occurs, each with equal probability, then 1 bit ofinformation is conveyed.
The set of symbols that are transmitted between a sender and receiver is called a source
alphabet, for example A =
{ai,
aj,...,aj}. The probability that the information source will produce symbol a, is defined as P(a,). Because the source alphabet isfinite,
thefollowing
equationholdstrue.
I^)
= l (Eqn.2.3)
Avector z isusedtorepresentthe set of all source symbolprobabilities,suchthat
z={P(al),P(a2),...,(P(a
t)}. The information source can be described completely using the finite ensemble (A,z). Ifk source symbols constitute the symbol alphabet, then according to
the law of large numbers, for a sufficiently large value of
k,
symbol a} will, on average, beoutput
kP(Oj
)
times.Therefore,
the informationobtainedfromobservingkoutputs isL-g
=-kP(a,
)
\og(P(ax
))
-kP(o2
)
\og(P(a2
))-...kP(a}
)
log(F(^
))
or
-k^P(aj)log(P(aj) (Eqn. 2.4)
Therefore,
theamountofinformation ineach sourceoutput, entropy, denoted asH(z)
isH(z)
=-j^P(aj)log(P(aJ)) (Eqn.
2.5)
7=1For example, ifan alphabet consists ofthree symbols ai, a2 and a^, with probabilities
0.2,
0.3and0.5 respectively,then theentropycanbe foundusingEqn.2.5 as shownbelow.
H(z)
=-
P(a}
)
\og(P(a}
))
=-(0.2 *log(0.2)
+0.3*log(0.3)
+0.5*log(0.5))
=AMlbits ;=i2.2 Image
Encoding
TechniquesTherearethreebasic steps for image compression: mapping,quantization and encoding. In the
intheencoding step. Thequantizationstep isused for
lossy
compression, where similar pixels canbemappedtothesame symbol. The mappingand quantizationstep decreasethe size ofthe databy
reducing the interpixel redundancies. For example, for an 8-bitimage,
if the image consistsentirelyofzeros,then onlyone symbolisneededtorepresenttheimage.Several different types of encoders exist to compress image
data,
such as run-length coding[17],
Huffman coding[7],
arithmetic coding[17]
and transform coding [17]. Some ofthesetechniques arediscussed inthe
following
sections.2.2.1 Huffman
Coding
In
1952,
D.A. Huffmandevelopedacoding technique,which was laternamedHuffman coding.Huffman coding produces the shortest possible average code length given the source symbol
set and the corresponding probabilities, only ifthe probabilities are exact powers of2. The Huffmanalgorithm canbe broken up into 3 steps:
1. Orderthesymbols accordingtotheirprobabilities.
2. Combinethe twosmallestprobabilitiesintooneto forma parent node
by
addingthetwoprobabilitiestogether.
3. Repeat step 2untilthere is onlyone root nodewith a value of1.0
Each of the nodes are then given a value
by
traversing
thebinary
tree and at each splitappending a T or a
'0"
to the codeword
depending
on which path wastaken. The algorithmcan be best described
by
example. The example shows the codeword construction process of Huffman coding forthesymbols and probabilities showninthe tablebelow.Symbol
Probability
a 0.05
b 0.05
c 0.2
d 0.25
e 0.45
Table2. 1 - Huffman
The figure below shows the
binary
tree created whendoing
the Huffman codeword construction usingtheprobabilities shownin Table 2.1.e 045
c 0 20
b 005
a 005
0 55
jl JK0 0
0 30
1_O10 0
Figure 2.1
-Huffman
Binary
TreeTo create this tree first the symbols were listed in order of
decreasing
probabilities as can be seen alongthe left side. Next the two smallest probabilities, 0.05 and 0.05 were combinedby
adding them together andforming
the 0.10 node. The probabilities were then reorderedby
decreasing
probabilitiesandthe nexttwo smallestprobabilities, 0.10 and 0.20, were combinedto formthe 0.30 node. The process repeats until the 1.0 root node was formed. Then at each
combinationaT was assignedto the
top
child node and a0to the bottomchild node as canbe seen in Figure 2.1. The codewords for each symbol arethen foundby
traversing
the tree fromthe root node to the corresponding child node and appending either the '0' or '1"
digit
depending
on which path wastaken. Thetablebelowshows each symbol and its corresponding codeword.Symbol Codeword
a 1100
b 1101
c 111
d 10
As can be seen in Tables 2.1-2.2 the symbols with the highest probabilities were given the
smallest codewords and the symbols with the lowest probabilities were given the larger symbols,which provides efficient compression.
Huffman encoding is a very useful compression method when compressing data in which the
probabilities are all integer powers oftwo. However one disadvantage is the decrease in
compression efficiency as the difference between the probabilities and the integer powers of
twoincreases.
2.2.2 Arithmetic
Coding
An arithmetic coderis another means ofreducing the redundancyin data. An arithmetic coder works
by
encoding a group of symbols as a real number in the range of 0 to 1. Severalarithmetic coderimplementations exist such as LZAP
[8],
theLee and Parkalgorithm[9],
theZ-coder
[10],
the IBMQM-coder[ll],
the IBMQx-coder[12]
and the Block Arithmetic Coder for Image Compression[1],
which isused forthisthesis.There aretwobasicpieces ofinformationthat are neededforarithmetic coding: the probability of a symbol and its encoding intervalrange.
Any
number of symbols canbe encodedusingone real number aslong
asthe precision ofthereal numbers is good enough. The example below illustrates howarithmetic codingworks.For this example, consider a system with a four-symbol alphabet as shown in the table below
withtheirprobabilities.
Symbol
Probability
a 0.1
b 0.2
c 0.3
d 0.4
Table2.3- Arithmetic
Coding
Example- SymbolThenumber of symbols that are goingto beencoded ineach codeword needstopredetermined
and known
by
both the encoder and decoder. For this example, four symbols are encoded in each codeword. The encodingofthemessage"accd"
canbe seenbelow.
Firsteach symbol isgiven a rangeaccordingto itsprobability. Therange starts from 0to 1, so
symbol *a is given the range 0 to
0.1,
symbol 'b"is given the range 0.1 to 0.3. symbol
'c'
is
given the range 0.3 to 0.6 and symbol
"d'
isgiven the range 0.6 to
1.0,
as illustrated in Figure 1 9't
Figure2.2- Arithmetic
Coding
Example-Step
1Becausethefirstsymbol inthemessage is
'a',
the interval forthesecond step becomes 0to 0.1. The range isthen broken upagain foreach symbol using itsprobability. Therangefor symbol 'a'is now 0 to
0.01,
the range for symbol 'b'is now0.01 to
0.03,
the range for symbol"c"
is
now 0.04to0.06andthe rangeforsymbol
'd"
isnow0.06to
1.0,
as shownin Figure 2.3.The next symbol in the message is
'c\
so the interval now becomes 0.03 to 0.06. The sameprocess is donetwomoretimestoencodethethird andfourthsymbols as can be seenin Figure 2.4. Afterthe encoding ofthe third symbol
'c'
therange becomes 0.039 to 0.048 andthe range is again broken up into subdivisions. The last symbol in the message is *d', so the message "accd"
Figure 2.3 - Arithmetic
Coding
Example-Step
20 fl 0 00 0 039
a
I
a a
01 _
T 0.01_
J
0 033_ 00399_
-)
03 _
\
\
0 03_ 0 039_ 0 041 7_
06 \
\
\
\
006_\ \
3 048.
~\
00444_
\
\
\
\
i
1 0 \01 \006 ", 0048
Figure2.4- Arithmetic
Coding
Example-Final Steps
There are problems inherent in arithmetic coding which are important to examine before
attempting to implement an arithmetic coder. Since no machine can have infinite precision, underflow and overflow can be an issue. If insufficient precision is used considering the
receivesthe entire codeword.
Also,
arithmetic coding isan error sensitive compression scheme,meaninga singlebiterror cancorrupttheentire message.
There are twobasic types of arithmetic coding: static and adaptive. Instatic arithmetic coding
the probabilities of each ofthe symbols do not change. With adaptive arithmetic coding, the
symbol probabilities are estimated
during
each step of the encoding process based on thechanging symbol frequencies that have been seen in the previously encoded messages.
Because in the real world the exact probabilities are impossible to produce, it cannot be
expected that an arithmetic coder will achieve maximum efficiency when compressing a
message. The bestan arithmetic coder cando istoestimatetheprobabilities onthefly.
2.3 Image
Halftoning
This thesis deals primarilywith the compression ofbitonal images. Several algorithms exist
for obtaining abitonal image from a grayscaleimage. The main goal of
halftoning
animage isto preserve the overall grayscale look ofthe image while changing each pixel from an 8-bit
value(couldalsobe 4-bitorhigherthan
8-bit)
intoa 1-bitbitonalvalue.2.3.1 Ordered
Dithering
There are several methods for converting an 8-bit grayscale image into a 1-bit bitonal image.
Ordered
dithering
is one ofthe simplest methods fordoing
this and involves using a dithermask [5]. This rectangular mask can be any size, but is usually square. The mask consists of
threshold values between 0 and
255,
for an 8-bit image. The mask is then moved over theentire image and each pixel is then compared with its correspondingvalue in the dither mask
usingtheequation below.
0
if
it, ,>m\1 // u, j
<
m,j
where Ujj is the original pixel atlocation
(ij)
with respectto thedithermask, m,j isthevalue inthe dither mask at position
(ij)
and uid'
is the new value ofthe pixel. The reason for the
white pixelhasa value of255 (for
8-bit),
while ina bitonal imageablackpixelhas a value of1and a white pixelhasa value of0. The dithermask isthenmoved aroundthe entireimageuntil
all pixelshavebeen halftoned.
Another
thing
toconsider whenperformingan ordereddither iswhattypeofdithermasktouse.There are two basic types of dither masks: dispersed-dot and clustered-dot. A dispersed-dot
mask would leavethe blackpixels spread out and not bunchedtogether, while a clustered-dot
mask would
keep
the black pixels grouped together and the white pixels clustered together.Dispersed-dot ordered dithers are designedto yield
halftones,
which conveythe impression ofgray. Clustered-dot ordered dithersare designedto yieldhalftoneswithfew isolatedpixels and
are
typically
used with printingdevices,
which cannot properlydisplay
isolated pixels in animage. Figure 2.5 shows halftoned images usingthe two differenttypes ofdithermasks, both
masks are4x4pixels.
(a)
Clustered-dot Dithered Image(b)
Dispersed-dot Dithered ImageFigure2.5- DitheredImages
As canbeen inthe above figure athigh resolutionit is sometimes difficultto tellthedifference
between clustered-dot and dispersed-dot although differences can be seen. The figure below
shows the three figures above except zoomed in on a specific area ofthe image to showthe
"^vv/jyjxw.w.
(a)Clustered-dot Dithered Image (b)Dispersed-dot Dithered Image
Figure 2.6
-Low ResoutionDithered Images
As can be seen when
halftoning
a low-resolution picture, such as the ones shown above inFigure
2.6,
the visual quality decreases significantly. Even at thisresolution the dispersed-dotdither still maintains a small illusion ofgrayscale, buttheclustered-dot image haspoor quality.
As expected onthe clustered-dotimagetheblackpixels are clusteredtogether.
2.3.2 Error Diffusion
Anothermethod of
halftoning
is errordiffusion [16]. As the nameimplies,
in this methodtheerror created
by
thethresholding
is diffused to increase the quality of the halftone. Thediagram below illustratesthe errordiffusion algorithm.
Input
+ A
Threshold ?Output
Error Filter
Figure2.7-ErrorDiffusionAlgorithm
The algorithm works
by
traversing
the image pixelby
pixel, in raster scan order, andthresholding
eachpixel, usuallywitha value of128 (for 8-bit images). Theerrorforthatpixelfrom
0,
depending
onthe color ofthe corresponding bitonalpixel. This error is then diffusedusingthe
Floyd-Steinberg
weights[16],
shown inthe figure below.X 7/16
3/16 5/16 1/16
Figure 2.8-
Floyd-Steinberg
WeightsThe 'x'
in the above figure is the current pixel. The error created
by halftoning
the currentpixel is then diffused to the neighboring pixels
by
multiplying the errorby
the value shown inFigure 2.8 andthen addingthat value to the grayscale value forthatpixel. As can be seen in
the above figure the
Floyd-Steinberg
weights only affect pixels that have not yet beenprocessed. Thefigure below shows animagethathas been halftonedusingerrordiffusion.
(a)
Error Diffused ImageW
.U ii
'
. .L .X
X-::'!''. '!j"j!.'. IP*'
\i*.
mm t- ~
agar;,i5__!* , f^g^I- i
llj:"f.nt'pL-/SS*
(b)
Dithered ImageFigure2.9- Error Diffused
andDithered Images
As can be seen in the above
figure,
the overall grayscale look ofthe error diffused image isimpressive. The error diffused image also looks betterthan the dispersed-dot dithered
image,
because it doesn't have the grid lines thatshow up inthedithered image. Below shows a
i.:;*.*..'
Fi'tf
i
(a)
Error Diffused Imageitiix ::::sftftaofsrtnocv. v.
:-:::-:>:':: :: :: :-:M':-:':-:':-:::-:::-:::-::i:::::
(b)
Dithered ImageFigure 2.10
-Low Resolution Error DiffusedandDithered Images
As can be seen in the low resolution images in Figure
2.10,
the error diffused image still hasmuch better quality than the dithered image. Obvious differences now appear between the
error diffused and the original
image,
but unlike the dispersed-dot dithered image theobject intheimage iseasilyrecognizable.
2.4
Lossy
CompressionDigital image compression algorithms can be classified intotwo categories: lossless and lossy.
A lossless compression algorithm is one in which afterthe image has been decompressed each
pixel value of the recovered image is identical to that of the original image. A
lossy
compression algorithm is one in whichthe image data ofthe decodedimage is not identical to
thatofthesource.
The goal of a
lossy
compression algorithm is to improve on the compression ratio whilekeeping
the visual distortion to an acceptable level. Compression ratio is defined using theequation shownbelow.
CompressionRatio=
Originalimagesize
Compressed imagesize
(Eqn. 2.
7)
The level of acceptable visual distortiondepends onthe application. There are several metrics
thatcanbeusedtomeasurethedistortion,such as root mean-squared-error
(RMSE)
andsignal-to-noise ratio (SNR). In image coding the peak signal-to-noise ratio
(PSNR)
is moreThe RMSEis definedusingtheequation shownbelow.
1 i N-l M-\
RMSE=
Y
j(x
-v )2
\N Mtt
j^'-J -'"'J (Eqn.2.8)
where xjj is the pixel in the original image at location (ij), v,,, is the pixel in the compressed
imageat location
(ij),
Nistheheight oftheimageandMisthewidth oftheimage.Thepeak signal-to-noise ratio is defined inthe equationbelow.
255 PSNR =20
log
10RMSE
(Eqn.
2.9)
Because the focus ofthis thesis is bitonal image compression, the PSNR metric alone is not
veryuseful. Thereason isthateach pixel can consistonlyof a0or
1,
sotheonlyerrorthatcanexist is 1. Another choiceisto use 0 and 255 asthe pixel values,then the error would be 255.
However,
this isalargeerror amount and couldbe misleading inthat for onlyone pixel errorina region, the value ofthe error could be rather large. To better approximate the perceived
grayscale error a metric called the modified peak signal-to-noise ratio
(MPSNR)
is used [21].Forthis metric, the inverse
halftoning
ofthe bitonal image is donefirst,
andthen the PSNR istaken. In order to do the inverse
halftoning
a Gaussian Low Pass Filter isconvolved with theoriginalbitonal
image,
as canbe seenintheequationbelow.G= 100
1 2 4 2
2 4 8 4 2
4 8 16 8 4
2 4 8 4 2
1 2 4 2 1
(Eqn.
2.10)
H,
=H*GUsing
Equations2.10-2.11,
the inversehalftone,
//_,,.,
of H is found. The MPSNR is thenfound using Equation
2.9,
using the original grayscale image to do the comparison. The unitfor Equation 2.9 is decibels (dB).
The images in Figure 2.1 1 showthevalues oftheMPSNRfor different levelsof noise addedto
the Lena image. Image
2.11(a)
is the lossless grayscale image. Image2.11(b)
is the losslesserror diffused Lena image. Images
2.11(c)
through2.11(f)
are the error-diffused image withincreasing
amounts of salt and pepper noiseadded. Ascanbe seeninthefigure,
asthe amountof noise
increases,
theMPSNRdecreases,
as expected.(b)MPSNR=25.7747dB (c)MPSNR=25.3156dB
(d)MPSNR=24.8631dB (e)MPSNR=24.0405dB (f)MPSNR=22.7038dB
Chapter
3.
Image Compression
Algorithms
There are several algorithms and standards that exist
today
forthe compression ofimages. Aswas stated above, the goal of lossless compression algorithms is to reach a compression
efficiency equal to the entropy. This chapter discusses several bitonal image compression
standards and algorithms, one of which is used for this thesis. The other compression
algorithms are
discussed,
becausethey
show other means for bitonal image compression. Thebitonal compression algorithm used for this thesis improves upon the deficiencies of those
algorithms.
3.1 CCITT
Group
3 Compression StandardThe Consultative Committee onTelephone andTelegraph
(CCITT)
developedtheGroup
3 Fax Algorithm(G3)
in 1980 [18]. The G3 compression standard was developedfor digital facsimiletransmission on the public switched telephone network. The main goal of this bitonal
compression algorithm was to be able to compress a document scanned at 100 dots per inch
(dpi)
and sampled at 1728 samples per lineto betransferred at4800 bitsper second(bps)
inanaveragetime of about one minute. This meansthat inorder to transmita standard 8.5x11 inch
pageinthetime needed, a compression ratio of about6.6 isneeded.
The G3 algorithm works
by
counting the size ofblocks of either all ones or all zeros andencoding this count. This method takes advantage of the
tendency
oftextual documents toinclude a lot of white space, because between each letter and between lines of a textual
documentis white space. There aretwo alternatecoding schemes inthe G3 algorithm: CCITT
Group
3 one-dimensional and CCITTGroup
3 two-dimensional.3.1.1 CCITT
Group
3 One-Dimensional Compression standardThe CCITT
Group
3 one-dimensional coding scheme encodes an image as a series ofvariablelength codewords, so that each codeword represents ahorizontal blockof either all white or all
black pixels. The codewords used are the Modified Huffman
(MH)
code. The ModifiedHuffman code has two types ofcodewords:
Terminating
codewords andMake-up
codewords.of0 to 63.
Make-up
codewords are used withterminating
codewords to encode blocks largerthan63 pixels. These make-up codewords canhandlepixel blocksofsize 64to 1728. Forrun
lengths larger than 1728 an optional set ofmake-up codewords canbe used which can encode
run lengths upto 2560 pixels, which would beused when
transmitting
documents at a higherresolution.
An End-Of-Line
(EOL)
codeword exists to signify eitherthe start of an image or the end of aline. Attheend of animage a special codewordis used calledReturn To Control
(RTC)
whichconsists of 6 EOL codewords. The flow diagram shown in Figure 3.1 illustrates the
one-dimensional
Group
3 compression standard.As can be seen in the flow
diagram,
the algorithm startsby inserting
an EOL character, as arule withthis algorithm,anEOL must existbefore the encodingofthefirst line. Then thefirst
runis counted and encoded accordingly. Therearethree tables thatare usedforthis algorithm:
Terminating
codes table (TTable),
Make-up
codes table (MTable)
and AdditionalMake-up
codes table (AM Table). The T Table consists of 128 codewords for all different run-lengths,
white or
black,
from 0 to 63 pixels.Therefore,
if a run exists of length 0 to 63 it can beencoded withjustone codewordfromthis table. The M Tableconsists of55 codewords. Ithas
a codeword for multiples of64 from 64 to 1728 and an extra one
defining
EOL.So,
ifa runlength is in the range of64 to
1728,
it is encoded as a codeword from the M Table and acodeword from the T Table. Finally, the AM Table is usedto handle runs oflength 1792 to
2560. It is just an extension ofthe M
Table,
so ifa run were oflength 1792 to2560,
itwouldbe encodedusinga codewordfromtheAM Table and acodewordfromtheT Table.
Forexample, ifa run of40 blackpixels exists, then theT Tableisusedtofindthecodewordfor
a run of40 black pixels (000001101100). So
"000001101100"
is the encoding of40 black
pixels. Ifa run of100white pixels exists first theMtable wouldbe used, usingthecodeword
for 64 white pixels
(11011),
since 64 is the biggest multiple of64 less than or equal to 100.Then the T Table is used to findthe codeword for 36 white pixels
(00010101),
because 100-64 = 36. So
Looking
atthesetables,
which can be found in[18],
it canbe seenthat the encoding of whitepixels has smaller codewords than for black pixels. This is because the G3 compression
standard was made primarily for facsimile transmission. Facsimile transmission consists
mostly oftextual
documents,
whichhave a lotof white space inthem. This allowsfortextualdocumentstocompress efficiently.
Begin
T
Countarun
Run-length <1792?
Run-length <64?
Look up T Table
Endof Line?
T
EOL
Endof Image?
Look up M Table
Look up AM Table
Reducerun-length
Reducerun-length
T
RTC
Figure 3.1 - Flow Chart forOne-DimensionalG3 Compression
3.1.2 CCITT
Group
3Two-Dimensional
CompressionStandardThe problem with the one-dimensional
Group
3 algorithm is that it only takes advantage ofruns in the
horizontal
direction. In a textual document runs exists in both the horizontal andvertical
directions.
Therefore,
inordertoget even greater compressionefficiencythealgorithmmust take advantage ofthe vertical runs as well. The two-dimensional
Group
3 algorithmexplores correlation of pixelsintheverticaldirectionas well asthehorizontal direction [18].
Both the one-dimensional and two-dimensional
Group
3 algorithms use a line-by-line codingmethod. In the two-dimensional algorithm, a reference element is used which determines the
mode in which the current group of pixels will be coded. The reference element can either
exist on the line currently
being
coded, called the codingline,
or the previousline,
called thereference line. After the entire coding line has been processed, it becomes the reference line
and the next line down becomes the coding line.
However,
one problem withcoding a line
while
taking
into account the previous line is that ifthere is a transmission error on oneline,
then allthelinesafterthatcan bewrong. To avoidthisproblemthetwo-dimensional algorithm
periodically sends a line usingtheone-dimensional G3 algorithm. Thisperiod is knownas the
Kfactor. Kcan be anypositive integer. Inother wordsfor every K
lines,
1 ofthemisencodedusingthe one-dimensional algorithm, and K-l ofthemare encoded using the two-dimensional
algorithm.
There are five pixels usedto determine which mode and howeach group of pixels is encoded
which arelisted in Table 3.1.
Changing
Element
Definition
a0 Thereference element onthecoding line.
ai Thenext element onthecoding lineto theright ofa0andtheopposite color of ao.
a2 Thenext element onthecoding linetotheright ofai andtheopposite color of aj.
bi
Thenext element onthereferencelineto therightofa0andtheopposite colorofa0.b2
Thenext element onthereferencelineto theright ofh. andtheopposite color ofb..Table3.1
The element ao is set from the previous iteration of the algorithm, and at the
beginning
ofencoding it is set to an
imaginary
white pixel beforethefirstpixel ofthe image. The examplein Figure 3.2 showstheplacement ofthe4 changingelements with respecttoa0.
Ref. Line
Coding
Line
a a
0 /
Figure 3.2
-Changing
Element Placement[17]
a
Therearethreecoding modes usedinthetwo-dimensional G3 algorithmthat aredetermined
by
the position ofthe changing elements shown in Figure 3.2: Pass
Mode,
Vertical Mode andHorizontal Mode. Pass Mode is used when the position of
b2
lies to the left of aj. Verticalmode is used when the relative distance between ai and
bi,
meaning the distance between aiand
bi
ifthey
were onthe sameline,
is lessthan or equal to3. Horizontal mode isused whenneitheroftheothertwo modes applies.
Each ofthe modes described above gets a set ofdistinct codewords. For Pass Mode there is
only one codeword that is ever used 0001. The coding ofthe location ofthe other changing
elements is not needed. For Horizontal Mode the codeword is
001+M(a0ai)+M(aia2),
wherea;aj is the length and color ofthe run between a, and aj. For example in Figure
3.2,
a0ai is awhite run of3.
M(a;a,)
is the codewordused inthe one-dimensional G3 algorithm foundintheM Table. There are 7 cases forthevertical mode,
depending
on where ai iswith respect tobi,
each withitsowncodeword. Table 3.2 describesthesedifferent cases.
Puta0justbefore 1"pixel
Detectb.
b.tothe leftof a,7
Begin
No Yes
1a LineofK lines?
Verticalmode
coding
Putanona,
iPassmodecoding
T
No
Endof Line?
T
Puta0justunder
b,2 Yes
T
EOL
EOL+ 1
One-dimensional coding
Detecta.
Horizontalmode
coding
Puta. ona,
Endof Image9
Yes
RTC End
Case Description Codeword
V(0)
ai isjustunderbi
1VR(1)
ai isonepixelto theright ofbi
OilVr(2)
ai istwopixelsto therightofbi
000011Vr(3)
aiisthreepixelsto theright ofbi
0000011Vl(1)
ai isone pixelto theleftofbi 010VL(2)
aiistwopixelsto theleftofbi 000010VL(3)
aj isthreepixelsto theleftofbi 0000010Table 3.2
-Vertical Mode Case Description
As shown in Figure
3.3,
thealgorithm startsby
checkingto see ifthe current lineisthefirst ofK
lines,
andifitis,
it doesone-dimensional coding. If it isnot,thenaois placedjust beforethefirstpixel and at, bi and
b2
are found. Afterthosethree changingelements arefound,
themodeofcoding, is foundandthepixelgroup is encoded accordingly. ThenaO isrepositioned andthe
whole process starts over again with the detection ofai,
bi
and b2. After the entire line hasbeen coded,thealgorithm checks toseeiftheimage is
done,
ifnot, it starts over again withthecheckingtoseeifthisisthefirstofK lines.
3.2 CCITT
Group
4Compression StandardIn
1984,
the CCITTGroup
4(G4)
compression standard was developed as a facsimile codingscheme forthe compression ofblack and white images [19]. The standard is designed strictly
for error-free digital facsimile transmission, and it assumes that all error correction is already
handledon a lower levelofthecommunicationprocess.
The
Group
4 standard works very similar to the two-dimensional G3 standard. The maindifference between the two standards is that the two-dimensional G3 algorithm periodically
encodes entire lines using the one-dimensional G3 method, but the G4 algorithm encodes all
lines using the two-dimensional G3 algorithm. When the G4 algorithm
begins,
it inserts animaginary
whitelineabovethe first lineoftheimagetobethe firstreference line.The main advantage ofthis method over the two-dimensional G3 algorithm is the improved
algorithm does one-dimensional encoding every K
lines,
and one-dimensional coding lowersthecompression efficiency, becauseit does nottake into account runs inthe vertical direction.
However,
robustness is a major problem withthe G4 standard. The G4 standard assumes thatthe medium across which the data is sent is completely error free.
However,
ifthere is a bittransmission error, corruption oftheentire imagecan occur.
Therefore,
the usabilityofthe G4compressionstandardlies primarily inthemedium usedtosendthedata.
3.3 JBIG
The Joint Bilevel Image Experts
Group
(JBIG)
standard is a lossless image compressionstandard developed for bitonal images [20]. One major advantage oftheJBIG standard isthat
it is capable of
doing
progressive or sequential encoding of an image and progressive orsequential
decoding
of animage independent ofhowtheimagewas encoded.Sequential coding is the type of coding used in the G3 and G4 algorithms. When using
sequential coding an image is encodedin raster scan order.
During
progressivecoding imagesare created fromthe original image but atlowerresolutions than the original image.
So,
first avery low-resolutionrepresentation ofthe image is encoded, then a representation ofthe image
with the next higher resolution and this continues until
finally
the original image is encoded.Progressive coding is very useful when
transmitting
a compressed image over a slowconnection,because thereceiver oftheimage can get alowresolutioncopyofthe image and as
more detail arrives decide if
they
would likethe entire image or to cancel the transfer. Eachresolutionlayerofthecompressed image in JBIG is doublethatofthe onebelow it.
One preprocessingnon-trivialtask thatmust be done istocreatethese lowerresolutionimages.
One option is to subsample the image
by
taking
every other row and every other column,howeverthiswould leavealow qualityrepresentationoftheimage. The JBIGstandard defines
a method in which to acquire lower resolution copies ofthe image. The main purpose ofthe
resolution reduction algorithm defined in the JBIG standard is the preservation of
density by
usinga filterwith exceptions. The exceptions forthis filterare for occasionally overridingthe
The JBIGresolution reductionalgorithmconsists oftwo simple steps. The first step isto break
up the image intogroups oftwo
by
two blocks ofpixels, paddingthe right orbottom side with zeros ifneeded. The second step consists ofmapping each one ofthe twoby
two blocks of pixelsintoone low-resolutionpixel. This mapping is doneby
usingatable defined intheJBIG standard. Twelve surrounding high-resolution and low-resolution pixels are used as an index into the table to determine the value ofthe low-resolution pixel. Thefollowing
equation isusedto findthe indexforpixel
X,
andthefigure below showsthepixel locations. 1 1Indexx =^a(j) 2J
(Eqn.
3.1)
1=0
af11)
ai81
(
a(9) )ai51
\
-yadOj
}
a(6)
ai4 ai:I
ILL
a(11 T a(0)
Figure 3.4
-Resolution Reduction Pixel Location
Thisprocess is done over and over untilthenumber of resolution levels specified
by
theuser isreached. Each group offour pixels in the higherresolution image is combined into one lower resolution pixel.
Compatibility
between sequential and progressive coding is achievedby dividing
the image intostripes. Astripeisagroup of rows of animage,
andis shownintheexample below.s=0
Stripe 0
Stripe 3
Stripe
6
s=1
Stripe 1
Stripe 4
Stripe
7
s=2
Stripe 2
Stripe 5
Stripe
8
25 dpi
d=0
Figure3.5
- Resolution
50 dpi
d=1
Reductionanc Data
Striping
100
dpi
In the above examplethe original image has a resolution of 100
dpi,
andtwo lower resolutionimages are created, the first with a resolution of50 dpi andthe second with a resolution of25
dpi. Eachofthe threeimages isthen broken up into 3 stripes as canbe seenin Figure 3.5. The
nextstep is called data ordering. From the9 stripes in Figure
3.5,
there are4 waysthey
can besorted accordingto theirresolution
layer, d,
and stripenumber, s. These four sortingvariationscanbeseeninthefigure below.
S=1 1 4"
d=0 d=1 d=i
=1
I \ 4
d=0 cfcI d=j d=0 d=1 d=
Figure 3.6- Data
Ordering
By
breaking
up the image into stripes, JBIG is able to provide compresseddata, CSu,
ofthestripe
image, ISu,
for stripe s of resolutiond,
which is independentof stripe ordering. This isimportant,
because itmeans that theamount ofinformationdescribing
an image is independentofthe encoding and expected
decoding
method.Therefore,
an image can be encoded eithersequentially or progressively and then at the time of
decoding
it can either be decodedsequentiallyorprogressively
depending
on whattheapplication requires.The actual compression of an image usingJBIG is done using an arithmetic coder. In orderto
provide thearithmeticcoder withtheprobabilities itneeds, atemplateis used. Thetemplate is
agroupofneighboringpixelsthatprovidesthecoder with a context,whichissimplyan
integer.
higher resolution layer can include pixels of lower resolution, but the lowest resolution layer
cannot include pixels from any other resolution layer. The three-line and two-line templates
are shown below in Figure 3.7. These templates are used for both sequential coding and
bottom-layercoding,whichisthecodingofthe layerwiththe lowestresolution.
X
X
X
X
X
X
X
X
A
X
X
X
X
A
X
X
X
X
?
X
X
?
(a)Three Line Template (b)Two Line Template
Figure 3.7
-Lowest Resolution Layer Templates
In these templates the '?' represents thepixel currently
being
encoded. Thepixels denotedby
'X'
are ordinary pixels in the template, and the pixel labeled
'A"
is an adaptive pixel. This
pixel is special inthat its locationmaychange
during
theencodingprocess inorder to adapt tothe image attributes and provide for a better prediction. For example, adaptivity provides
considerable gain with dithered images. The algorithm for
determining
when and where tomove the adaptive pixel in the above templates is not defined in the JBIG standard and is
instead left to the programmer. However the adaptive pixel can never be at the same spot as
one ofthepixelsdenoted
by
an'X'
norcanit be a casualpixel,whichis one ofthepixels ahead
ofthe current pixel
being
encoded. Thisis to allow fordecoding
ofthe image. Eachofthe 10pixels, both
'X'
and 'A', make up a 10-bit number where each pixel is a bit ofthe number.
This 10-bitnumberisthecontextofthepixel.
This context is then used
by
the arithmetic coder to produce a probability p0 or pi, theprobabilitythatthepixel denoted
by
the '?' is a0 or 1 respectively. Iftheprobability estimateis accurate and close to 0 or
1,
then the compression ratio will be very good. The purpose oftheJBIGtemplates istomakethevalue ofthepixel
being
encodedhighly
predictable.Figure 3.8 shows two ofthe templates that can be used for differential-layer coding, or coding
for sequential coding. As can be seen withthese
templates,
there is still an adaptive pixel thatis used as well as 5 ordinarypixels used inthe template. The difference isthat ineach ofthese
templates there is 4 pixels used fromthe lower resolution image. The reason that this can be
done is whenthe decoder isprocessing it decodes the lowerresolution layers first sothe lower
resolution pixels are available forthecontext.
X X
A y. X A X X
X
N,
X V
"*^
/-\
xi \ \ *
) 1 *
)
- - - 'r
\^_^y
f K / / ^ /
i i
v
'
)
('
<)
\ > 11
{
> IFigure 3.8
-Differential Layer Templates
Another method JBIG uses to improve compression efficiency is called prediction. In JBIG
there are two types of prediction defined: typical prediction and deterministic prediction.
Typical prediction can actually be broken up into two parts: bottom-layer typical prediction
anddifferential-layertypicalprediction.
Bottom-layertypical prediction is a very simple algorithm in which it checks fortypical
lines,
which are linesthatare identicalto theone above it. Inthecase it findsa typical
line,
thatlineisnotcoded,therefore,thisspeedsupthealgorithmas well asmaking itmore efficient.
Differential-layertypical prediction works
by
attempting to predict the four higher resolutionpixelsthat correspondtoone low-resolution pixel. Ifthiscanbe donethenthere isno reasonto
encode the four higher-resolution pixels. To do this, the algorithm searches regions of solid
the 8 surroundingpixels have the same color asX then the 4 high-resolution pixels associated
with X most
likely
have the same color as X. Ofcourse, there are exceptions, but this is thegeneral algorithm behind differential-layer typical prediction. The advantages to
differential-layertypical prediction is thatthe encodingand
decoding
process can runfaster,
becausethey
donot needto encode thehigherresolution pixels thatcan bepredicted. Also,thecompression
efficiencywouldbeimproved.
Deterministic prediction is similarto differential-layertypical prediction in that it attempts to
predict the value ofthe 4 highresolution pixels associated with one low resolutionpixel. The
difference is in the way that it does this. The deterministic prediction is a table-driven
algorithm. The values of certain pixels in the low-resolution image and pixels in the high
resolution image are used as an index into a table to check for determinicity. Because the
deterministic prediction tables depend
heavily
on the type of resolution reduction algorithmused, JBIG allows the user to define the deterministic prediction tables associated with a
resolution reduction algorithm. The diagram below shows the pixels that are used for
deterministicprediction andtheirposition intheindex.
r
s
r
\
\
D1
\
1)
v.
4 5 6
r
X
{
X
\
-)
\
'1)
v^
10 1112
Figure3.9- DeterministicPrediction Pixels
AsstatedpreviouslyJBIGuses an arithmeticcodertodo theactual encodingoftheimage. The
Typical Prediction (BottomLayer) Adaptive Templates ATMOVE * T T
? ModelTemplates
Adaptive Arithmetic Encoder A A
Cs,0
LNTP TPVALUEFigure 3.10
-Sequential Encoder Block Diagram
In Figure 3.10
Is0
is the original image dataandCs,o
is the compressedimage. The first blockinthediagram isthe typical prediction
block,
which,for sequentialcoding,just checksto seeifthe previous line is equal to the current line and if so the current line is not encoded. The
output ofthis block is TPVALUE meaning typicalprediction value andthe LNTP is the Line
Not Typical variable. The middle two blocks are the adaptive template and model template
blocks,
which handle the moving of the adaptive pixel and providing the context for theencoder. The ATMOVE variable specifies when the adaptive pixel has moved so that this
change can be known at thetime ofdecoding. This way the decoder does not need to do any
searching forthecorrectsetting foradaptivetemplates.
Figure 3.11 shows the encoder for differential layer encoding. This encoder is used when
doing
progressive codingon a layerthatisnotthebottom layer.ATMOVE
s,d-1
's.d
Ld-1
T T ? ? T }r T ? T
Typical Prediction Deterministic Adaptive
Model Templates
Adaptive Arithmetic
Encoder
c-v
(Differentia) Predicton Templates
A A
A^
DPVALUE
As can be seen inthis block it usesboththe current layer
image,
lsr\,
as well as the image fromthe previous
layer, lsA.\,
a lower resolution image. It performs both typical prediction anddeterministic prediction, described above, and produces the TPVALUE and DPVALUE
variables respectively. Thetwo templatefunctional blocks now usethetemplates that spanthe
multiple layers. Thethreeoutputs ofthis encoder areATMOVE which tells the decoder when
an adaptive pixel was moved,
Isu_i,
which is the input image to the next stage asIsu,
andCs,u
which isthecompression ofthe
ISd
image fromthisstage.Theencoder fortheentire system ofJBIGwhen usingprogressive coding can be found below.
Thisusesthe sequential encoder and thedifferentialencoder shown in Figures 3.10 and 3.1 1 as
building
blocks.D Resolution Reduction
'o-L
Resolution ReductionT 1J
DifferentialLayerEncoder DifferentialLayer Encoder
^W Sequential Encoder
Co.o
Cs-1,0
C. C
^s-i,D-i
Cq.D
Cs-1,D
Figure 3.12
-JBIGProgressive Encoder
As can be seen in Figure 3.12 for progressive coding there is a variable number of stages,
depending
onthenumberofresolutionlayersused. Withthe exception ofthebottom-layer,
allofthe stages consist of a differential layer encoder, shown in Figure
3.10,
and a resolutionreduction
block,
whichis described above. The bottom-layer stage,I0,
consists of a sequential3.4 JBIG2
The Joint Bilevel Image Experts
Group
has developeda new standard,informally
referredto asJBIG2,
for lossless andlossy
compression of bilevel images [6]. It supports model-basedcodingoftextandhalftonesto permithighercompression ratios than
JBIG,
G3 and G4. JBIG2 also allows a preprocessing step forintroducing
loss that can be done to increase thecompression ratio,
hopefully
without significantly affecting the visual quality of the image.The main goal when
designing
JBIG2 wasto provide lossless compression performance betterthan thatofexisting standards as well as toprovide
lossy
compression for bilevel images withalmost nodegradation inquality,which none ofthecurrent standards provide.
JBIG2 works
by breaking
up the image into segments and encoding each ofthese segmentsindividually. For the most part, the images are broken up into textual regions and halftone
regions. JBIG2 assumes it knows whether a certain image segment is a text region or a
halftoneregion. Fortextual imagesa character-basedpattern-matchingtechniqueis used. This
pattern-matching technique is effective, because on a typical page of text, there are many
repeated characters.
So,
instead ofencoding all ofthe instances ofthe characters, only oneinstance of each character is encoded and entered into a dictionary. At the time of
decoding
this
dictionary
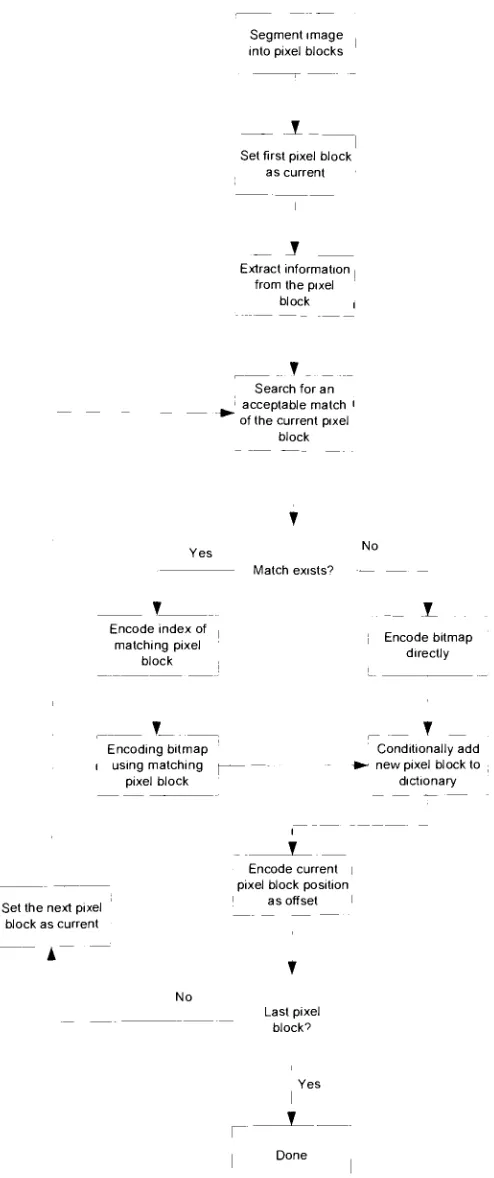
entry isthen copied wheneveranotherinstanceofthatcharacterappears.JBIG2 provides for two pattern-matching algorithms, the first of which is called Pattern
Matching
and Substitution. Figure 3.13 shows the flow diagram forthe pattern matching andsubstitution algorithm. As can be seenthealgorithm starts
by
breaking
upthe image intopixelblocks where
hopefully
each pixel block is a character. Next each of the pixel blocks ischecked to see if it is already in the
dictionary,
if itis,
the index ofthe entry it matches isencoded. If it is not found in the
dictionary,
then the character is encoded and added to thedictionary. After a pixel block is encoded its position is encoded so that the decoder knows
where toput
it,
usuallythisposition isthe distance fromtheprevious character. Fortheactualformat ofthe JBIG2
file,
contrary to what Figure 3.13illustrates,
thedictionary
data and theencoded data (the
dictionary
index and offset) is not interleaved. Thedictionary
is kept in aSegmentimage into pixelblocks
Set firstpixelblock as current
Extractinformation fromthepixel
block
Search foran acceptable match ofthecurrent pixel
block
No
Matchexists?
Encodeindex of matchingpixel
block
Encodebitmap
directly
Addnew pixel blockIodictionary
Setthenextpixel blockas current
, Encodecurrent pixelblockposition
as offset
T
No
Lastpixel block?
Yes
Figure 3.13- JBIG2Pattern
An algorithmforthe segmentation processdescribed above isnot given in theJBIG2 standard,
so the implementation is left up to the programmer to use any segmentation technique. The
next step inthe pattern matching and substitutiontechnique is toextract informationabout the
pixelblock:
height,
width, area, position, etc.In a common scanned textual document two instances ofthe same character
typically
do notmatchpixel forpixel,eventhoughthehumaneye seesthem asthesame.
Therefore,
the taskofsearching foran acceptable match inthe
dictionary
isnot atrivial one. This process is done intwo steps. The first step consists ofprescreening, where each oftheentries in the
dictionary
ischecked to see if its
features, height,
width, area, position, or the number ofblack pixels areclose to those ofthe current pixel block. Thesecond step consists ofcomputing a match score
foreach ofthe potential matches that remain. A simple example ofthematch score wouldbe
the
Hamming
distance[23],
which is foundby
first aligning the two blocks in comparisonaccordingto theirgeometric centers oftheir
bounding
blocks andthen counting the number ofpixelsthatdiffer. The
dictionary
entry withthe highestmatch score isassumed tobe identicalto thepixelblock
being
encoded, if itsmatch scoreis above a predefinedthreshold.In the case where a match is found the associated numerical
data,
thedictionary
index andposition,areeitherbitwiseorHuffman-basedencoded. Inthecase wherethereisno acceptable
match andthenew character mustbeaddedtothe
dictionary,
thebitmap
ofthenew characterisencodedusingabitonalcompressionmethod,such asG4 or
JBIG,
discussedpreviously.Thepatternmatchingand substitutiontechnique is a
lossy
compression algorithmthatprovidesgood compression ratios oftextual data. Oneproblem withthis technique isthat occasionallya
wrong character is matched andthen when the data is
decoded,
an incorrect character exists inthetextualdata.
The alternativeto patternmatching and substitut